【control_manager】无法加载,gazebo_ros2_control 0.4.8,机械臂乱飞
删除URDF和SDRF文件中的特殊注释#, !,:
xacro文件解析为字符串时出现报错
一开始疯狂报错Waiting for '/controller_manager' node to exist
1717585645.4673686 [spawner-2] [INFO] [1717585645.467015300] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' node to exist
1717585647.4782753 [spawner-2] [INFO] [1717585647.478000995] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' node to exist
1717585649.4881501 [spawner-2] [ERROR] [1717585649.487808213] [spawner_joint_state_broadcaster]: Controller manager not available
1717585649.6335490 [ERROR] [spawner-2]: process has died [pid 39251, exit code 1, cmd '/opt/ros/humble/lib/controller_manager/spawner joint_state_broadcaster --controller-manager controller_manager --ros-args'].
1717585649.6425650 [INFO] [spawner-8]: process started with pid [39588]
1)是控制器没安装,把所有控制器都安装一遍后
sudo apt-get install ros-humble-controller-manager
sudo apt install ros-humble-ros2-control
sudo apt-get install ros-humble-gazebo-ros2-controlsudo apt install ros-humble-gazebo-ros-pkgs
Controller manager not available in ROS2
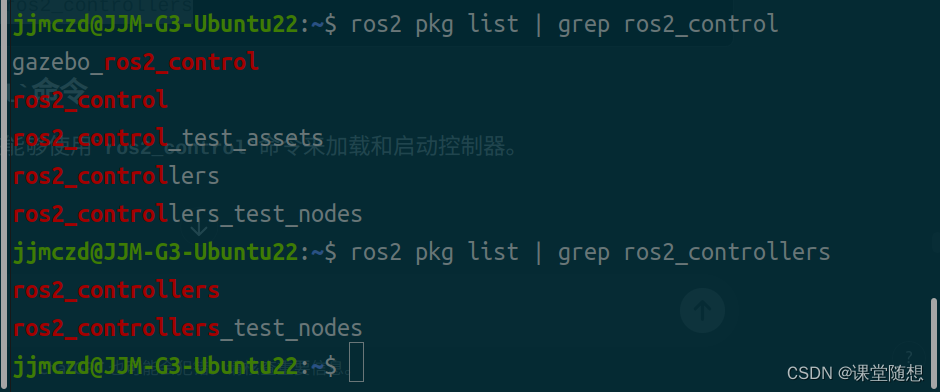
确认安装
ros2 pkg list | grep ros2_control
ros2 pkg list | grep ros2_controllers
#更新软件源
sudo add-apt-repository ppa:openrobotics/gazebo11-non-amd64
sudo apt update
# 安装gazebo11
sudo apt install gazebo
sudo apt install ros-humble-gazebo-*
此时,注意到gazebo_ros2_control为最新版0.4.8
我遇到的问题就是在另一台虚拟机上可以正常进行moveit2+Rviz+Gazebo的联合仿真,但是相同的文件换一台电脑就无法执行了。
Rviz中显示报错TF有部分显示No transform from [..._link] to [world]
2)命名空间问题?Unicode编码?Fix Frame设置?gazebo世界模型加载失败?
安装Unicode
sudo apt-get install unicode
下载Gazebo模型到本地~/.gazebo/models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
rviz模型显示异常,且rviz中提示rviz No transform from [link1] to [link2]
/spawn_entity无响应,RViz模型加载失败
日志管理器
ros2 run rqt_console rqt_console
Node: gazebo_ros2_control Time: 21:06:37.236569001 (2024-06-05) Severity: Error
parser error Couldn’t parse parameter override rule: '–param
robot_description:=<?xml version="1.0" ?>
<mesh filename="file:///home/jjmczd/test/install/dual_descr, at ./src/rcl/arguments.c:343Location: ./src/gazebo_ros2_control_plugin.cpp:Load:260
删除URDF和SRDF文件的所有注释
删除注释中的冒号
source /usr/share/gazebo/setup.sh
相关文章:
【control_manager】无法加载,gazebo_ros2_control 0.4.8,机械臂乱飞
删除URDF和SDRF文件中的特殊注释#, !,: xacro文件解析为字符串时出现报错 一开始疯狂报错Waiting for /controller_manager node to exist 1717585645.4673686 [spawner-2] [INFO] [1717585645.467015300] [spawner_joint_state_broadcaster]: Waiting for /con…...
深入对比:Transformer与LSTM的详细解析
在深度学习和自然语言处理(NLP)领域,Transformer和长短时记忆网络(LSTM)是两个备受瞩目的模型。它们各自拥有独特的优势,并在不同的任务中发挥着重要作用。本文将对这两种模型进行详细对比,帮助…...

lsof 命令
lsof(list open files)是一个列出当前系统打开文件的工具。在linux环境下,任何事物都以文件的形式存在,通过文件不仅仅可以访问常规数据,还可以访问网络连接和硬件。所以如传输控制协议 (TCP) 和用户数据报协议 (UDP) …...
F5G城市光网,助力“一网通城”筑基数字中国
《淮南子》中说,“临河而羡鱼,不如归家织网”。 这句话在后世比喻为做任何事情都需要提前做好准备,有了合适的工具,牢固的基础,各种难题也会迎刃而解。 如今,数字中国发展建设如火如荼,各项任务…...
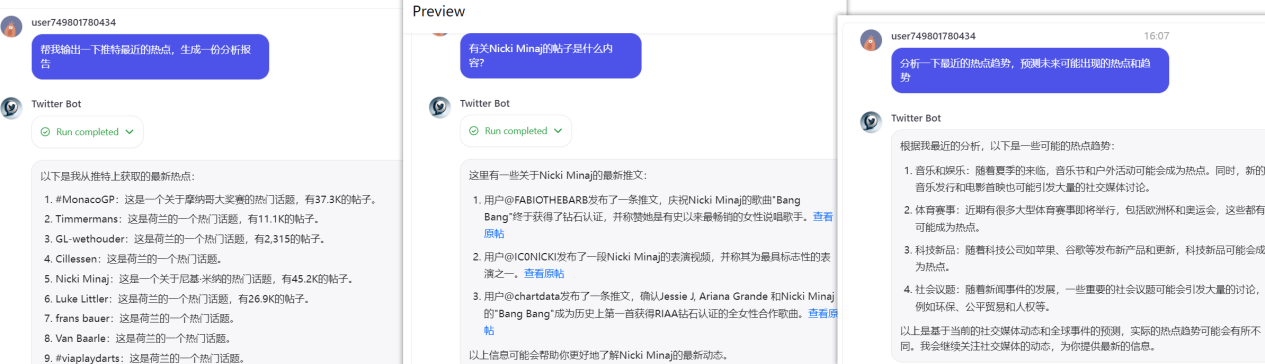
Ownips+Coze海外社媒数据分析实战指南
目录 一、引言二、ISP代理简介三、应用实践——基于Ownips和coze的社媒智能分析助手3.1、Twitter趋势数据采集3.1.1、Twitter趋势数据接口分析3.1.2、Ownips原生住宅ISP选取与配置3.1.3、数据采集 3.2、基于Ownips和Coze的社媒智能助手3.2.1、Ownips数据采集插件集成3.2.2、创建…...
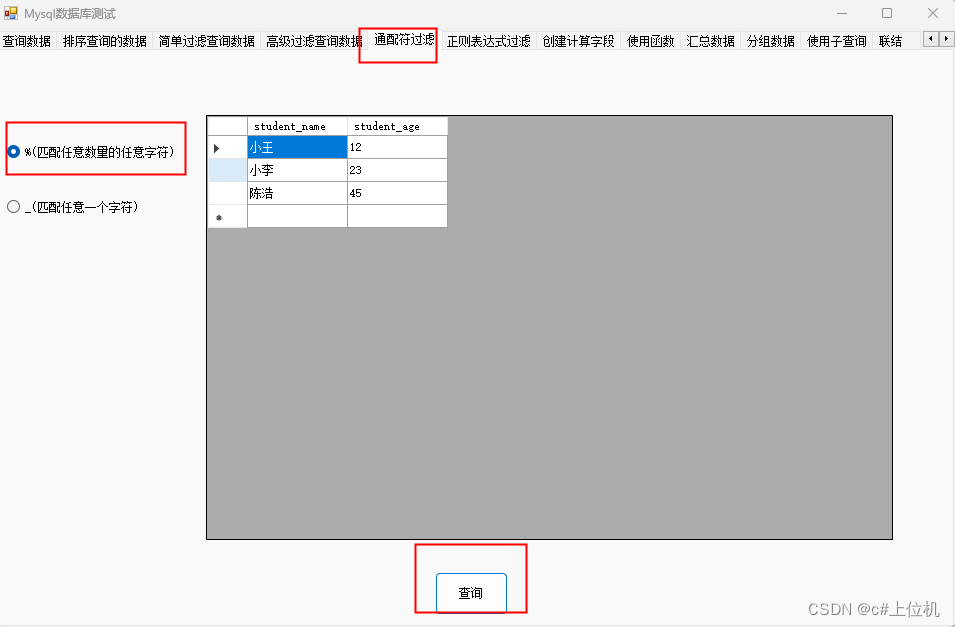
C#操作MySQL从入门到精通(10)——对查询数据进行通配符过滤
前言 我们有时候需要查询数据,并且这个数据包含某个字符串,这时候我们再使用where就无法实现了,所以mysql中提供了一种模糊查询机制,通过Like关键字来实现,下面进行详细介绍: 本次查询的表中数据如下: 1、使用(%)通配符 %通配符的作用是,表示任意字符出现任意次数…...
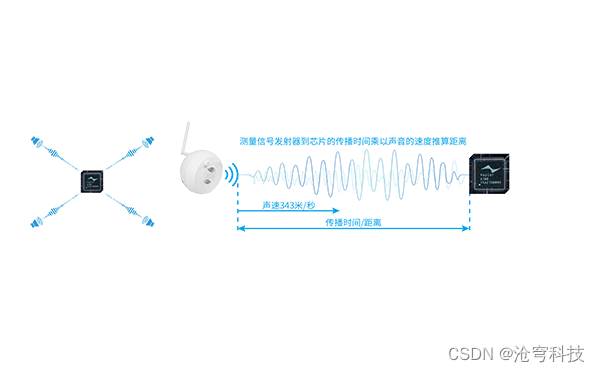
厘米级精确定位,开启定位技术新时代
定位技术在当前这个科技发展时代可以说是以以前所未有的速度在发展,其中厘米级精确定位技术更是成为当前的研究热点和实际应用中的佼佼者。这项技术以其高度的精准性和广泛的应用前景,正在逐渐改变我们的生活和工作方式。接下来我们跟着深圳沧穹科技一起…...
docker 存储 网络 命令
文章目录 1 docker存储1.1 目录挂载2.1卷映射2.1.1卷映射和目录挂载的区别2.1.2卷映射的使用 2 docker网络2.1查看docker的默认网络2.2查看容器的IP2.3容器互通2.4自定义网络2.4.1 创建自定义网络2.4.2创建容器的时候加入到自定义的网络2.4.3使用域名进行容器之间的访问2.4.4re…...
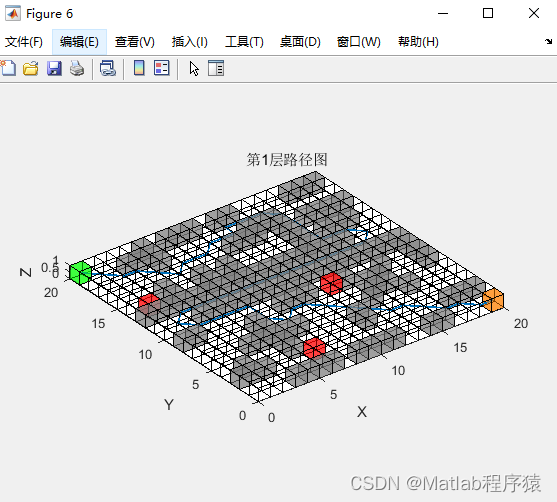
【MATLAB源码-第222期】基于matlab的改进蚁群算法三维栅格地图路径规划,加入精英蚁群策略。包括起点终点,障碍物,着火点,楼梯。
操作环境: MATLAB 2022a 1、算法描述 蚁群算法(Ant Colony Optimization,ACO)是一种通过模拟蚂蚁觅食行为的启发式优化算法。它由意大利学者Marco Dorigo在20世纪90年代初提出,最初用于解决旅行商问题(T…...
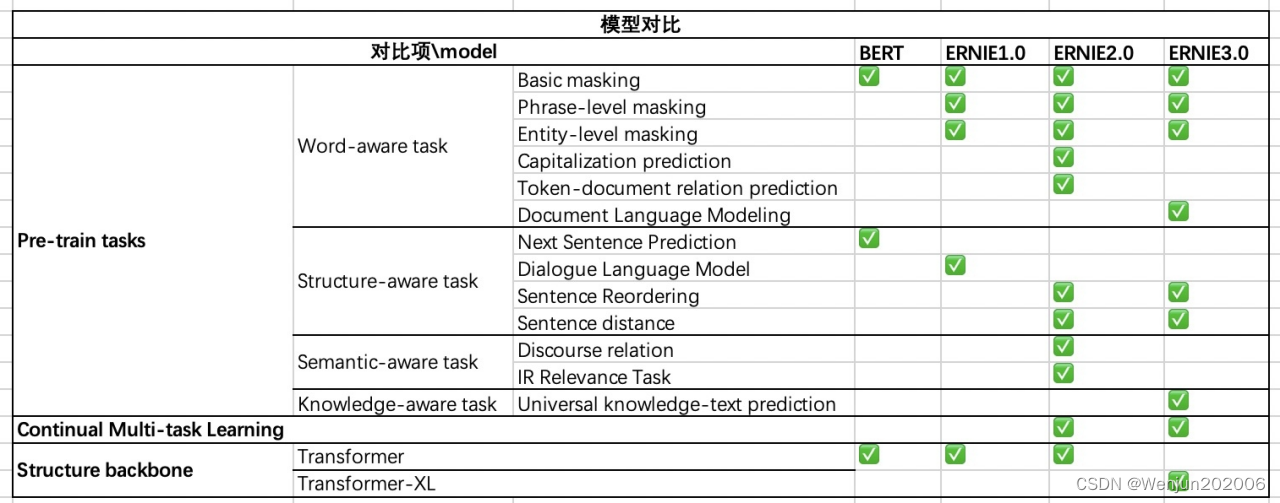
百度ERNIE系列预训练语言模型浅析(4)-总结篇
总结:ERNIE 3.0与ERNIE 2.0比较 (1)相同点: 采用连续学习 采用了多个语义层级的预训练任务 (2)不同点: ERNIE 3.0 Transformer-XL Encoder(自回归自编码), ERNIE 2.0 Transformer Encode…...
Ubuntu 20.04 LTS配置JDK、Git
一、配置JDK 1.1 更新系统 执行以下命令 sudo apt update 出现以下界面即为安装成功 1.2 安装openjdk-11-jdk Ubuntu20.04中没有默认JDK,执行以下指令安装,默认会自动配置一些必要环境变量 sudo apt install openjdk-11-jdk 1.3 配置环境变量&…...

外汇天眼:Marqeta加速欧洲业务发展,华沙办公室正式开幕
Marqeta,全球现代卡发行平台,今天宣布在波兰华沙设立新办公室,以支持其长期的业务和增长战略。通过在波兰设立业务,Marqeta直接获得了进入欧盟的通道,为其在跨境增长和提供增强服务奠定了良好基础。波兰作为欧洲中心位…...

使用【AliceCarousel】实现轮播功能
无论是在react还是vue项目中,我们都可能会遇到需要轮播的场景,在实习中,遇到了实现组件轮播的需求,下面进行简要记录。 1. 安装AliceCarousel npm install react-alice-carousel --save 2. 引入AliceCarousel组件 import Reac…...

全屋智能的本质是低成本的重构
全屋智能(这里指的不是每个电器都可以在APP上控制,而是基于场景化的全屋智能),我第一次去圣都总部听讲的时候是不准备做的(我的理解是这玩意儿带来的是至少十万的成本)。但随着对于装修各项事物的接触&…...
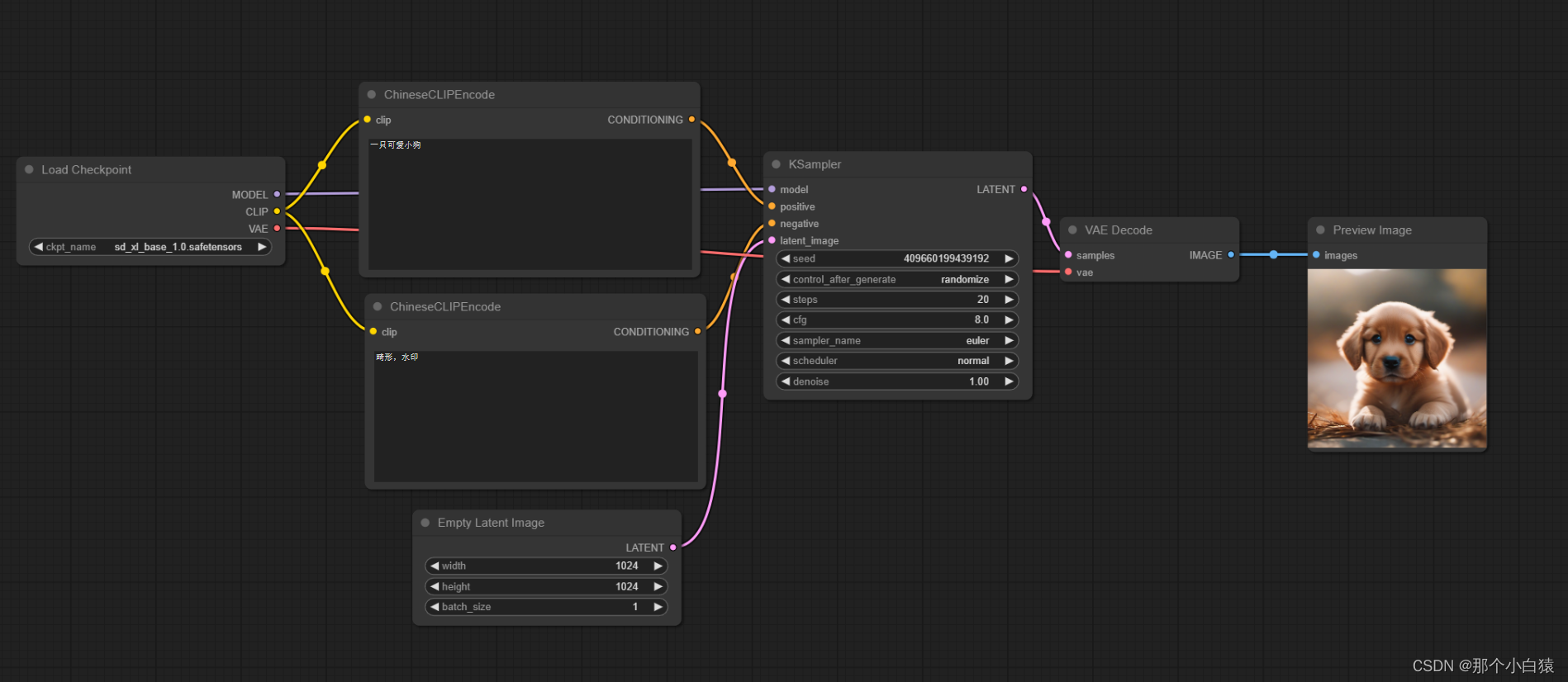
开发一个comfyui的自定义节点-支持输入中文prompt
文章目录 目标功能开发环境实现过程翻译中文CLIP编码拓展仓库地址完整代码目标功能 目前comfyui的prompt提示词输入节点 CLIP Text Encode 只支持输入英文的prompt,而有时候我们需要自己制定一些prompt,所以就得将我们想要的提示词翻译为英文后再复制粘贴到该节点的输入框中…...

代码随想录第二十九天打卡| 491.递增子序列,46.全排列,47.全排列 II
491.递增子序列 本题和大家刚做过的 90.子集II 非常像,但又很不一样,很容易掉坑里。 代码随想录 视频讲解:回溯算法精讲,树层去重与树枝去重 | LeetCode:491.递增子序列_哔哩哔哩_bilibili class Solution { public:…...
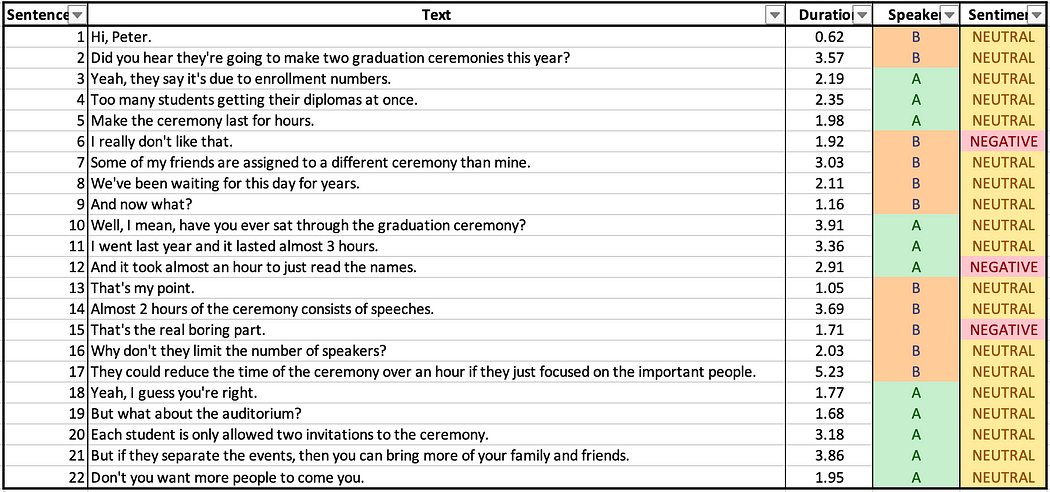
音频数据上的会话情感分析
情感分析,也被称为观点挖掘,是自然语言处理(NLP)中一个流行的任务,因为它有着广泛的工业应用。在专门将自然语言处理技术应用于文本数据的背景下,主要目标是训练出一个能够将给定文本分类到不同情感类别的模型。下图给出了情感分类器的高级概述。 例如,三…...

算法金 | 一文读懂K均值(K-Means)聚类算法
大侠幸会,在下全网同名[算法金] 0 基础转 AI 上岸,多个算法赛 Top [日更万日,让更多人享受智能乐趣] 1. 引言 数据分析中聚类算法的作用 在数据分析中,聚类算法用于发现数据集中的固有分组,通过将相似对象聚集在一…...
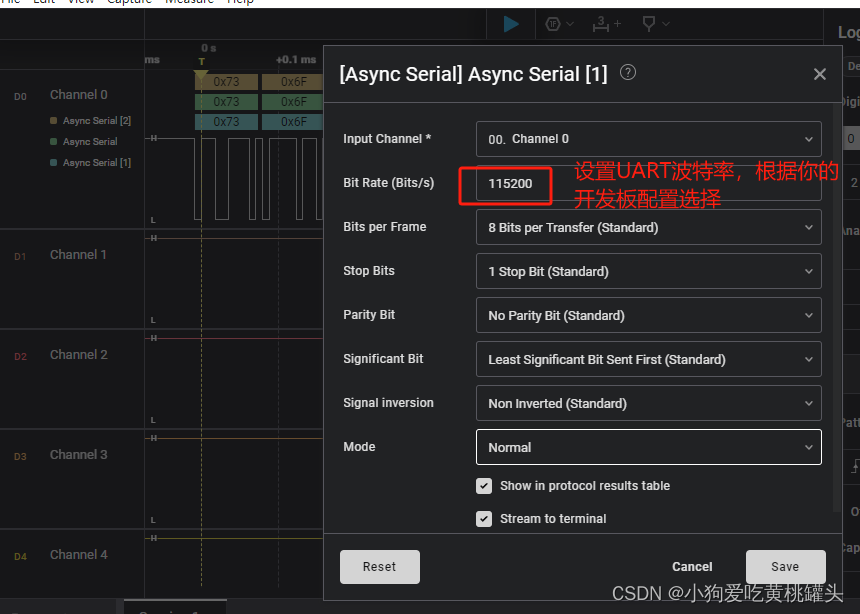
江协科技STM32学习-1 购买24Mhz采样逻辑分析仪
前言: 本文是根据哔哩哔哩网站上“江协科技STM32”视频的学习笔记,在这里会记录下江协科技STM32开发板的配套视频教程所作的实验和学习笔记内容。本文大量引用了江协科技STM32教学视频和链接中的内容。 引用: STM32入门教程-2023版 细致讲…...

支付系统-业务账单
target:离开柬埔寨倒计时-210day 前言 最近不知道该写什么了,很多东西要写起来非常耗时间,写作是真的不容易呀 我们的支付系统账单有两大类,一个是业务账单还有一个就是资金记录,都是引发资金流后的资金变动表现&…...

突破单人游戏限制:Nucleus Co-op焕新本地多人游戏体验
突破单人游戏限制:Nucleus Co-op焕新本地多人游戏体验 【免费下载链接】splitscreenme-nucleus Nucleus Co-op is an application that starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/spl…...
)
告别乱码!用.editorconfig一劳永逸解决Unity团队编码冲突(附完整配置)
告别乱码!用.editorconfig一劳永逸解决Unity团队编码冲突(附完整配置) 团队协作开发Unity项目时,最令人头疼的问题之一莫过于编码格式不统一导致的乱码。想象一下这样的场景:你精心编写的C#脚本在同事的电脑上打开时&a…...

用Notepad++打开PLY文件:手把手教你读懂三维点云与网格数据的‘源代码’
用Notepad打开PLY文件:手把手教你读懂三维点云与网格数据的‘源代码’ 当你第一次拿到一个PLY文件时,可能会感到困惑——这个看似普通的文本文件,如何承载复杂的三维世界?就像程序员通过阅读源代码理解软件逻辑一样,我…...

从JDBC到MyBatis:手把手调试源码,看一个`String`类型的`id`参数如何走完数据库查询与映射的全流程
从JDBC到MyBatis:手把手调试源码,看一个String类型的id参数如何走完数据库查询与映射的全流程 在Java持久层框架的演进历程中,MyBatis凭借其灵活的SQL控制能力和优雅的ORM映射机制,成为众多开发者处理复杂数据库操作的首选工具。…...

本地化图片翻译开源工具:漫画翻译与OCR识别的本地化部署方案
本地化图片翻译开源工具:漫画翻译与OCR识别的本地化部署方案 【免费下载链接】manga-image-translator Translate manga/image 一键翻译各类图片内文字 https://cotrans.touhou.ai/ (no longer working) 项目地址: https://gitcode.com/gh_mirrors/ma/manga-image…...

SteamAutoCrack终极指南:三步实现Steam游戏离线自由运行
SteamAutoCrack终极指南:三步实现Steam游戏离线自由运行 【免费下载链接】Steam-auto-crack Steam Game Automatic Cracker 项目地址: https://gitcode.com/gh_mirrors/st/Steam-auto-crack 对于众多Steam游戏玩家来说,你是否曾遇到过这样的困境&…...
)
开关电源救星:用TVS二极管搞定MOS管击穿问题(以24V推挽电路为例)
开关电源救星:用TVS二极管搞定MOS管击穿问题(以24V推挽电路为例) 在中小功率开关电源设计中,MOS管击穿是工程师最头疼的故障之一。我曾在一个24V推挽式电源项目中,连续烧毁了5个MOS管,直到用示波器捕捉到那…...

从Linux驱动到HDF框架:手把手教你将CH9344 USB串口驱动适配OpenHarmony 4.0
从Linux到OpenHarmony:CH9344 USB串口驱动HDF适配全解析 当传统Linux驱动遇上新兴的OpenHarmony HDF框架,技术迁移的挑战与机遇并存。本文将深入探讨如何将成熟的CH9344 USB转串口驱动无缝迁移至OpenHarmony 4.0平台,为开发者提供一套可复用的…...

RetDec反编译工具全攻略:从入门到精通的逆向工程实践指南
RetDec反编译工具全攻略:从入门到精通的逆向工程实践指南 【免费下载链接】retdec RetDec is a retargetable machine-code decompiler based on LLVM. 项目地址: https://gitcode.com/gh_mirrors/re/retdec 一、认知层:解密RetDec的核心价值与技…...

告别命令行!Auto-py-to-exe可视化打包Python程序的完整指南
1. 为什么需要可视化打包工具? 每次用PyInstaller打包Python程序时,最头疼的就是记不住那一长串命令行参数。上周我帮同事打包一个数据分析工具,光是调试--add-data参数就花了半小时,最后发现是路径写错了斜杠方向。这种经历让我意…...