使用onnxruntime加载YOLOv8生成的onnx文件进行目标检测
在网上下载了60多幅包含西瓜和冬瓜的图像组成melon数据集,使用 LabelMe 工具进行标注,然后使用 labelme2yolov8 脚本将json文件转换成YOLOv8支持的.txt文件,并自动生成YOLOv8支持的目录结构,包括melon.yaml文件,其内容如下:
path: ../datasets/melon # dataset root dir
train: images/train # train images (relative to 'path')
val: images/val # val images (relative to 'path')
test: # test images (optional)# Classes
names:0: watermelon1: wintermelon使用以下python脚本进行训练生成onnx文件:
import argparse
import colorama
from ultralytics import YOLOdef parse_args():parser = argparse.ArgumentParser(description="YOLOv8 train")parser.add_argument("--yaml", required=True, type=str, help="yaml file")parser.add_argument("--epochs", required=True, type=int, help="number of training")parser.add_argument("--task", required=True, type=str, choices=["detect", "segment"], help="specify what kind of task")args = parser.parse_args()return argsdef train(task, yaml, epochs):if task == "detect":model = YOLO("yolov8n.pt") # load a pretrained modelelif task == "segment":model = YOLO("yolov8n-seg.pt") # load a pretrained modelelse:print(colorama.Fore.RED + "Error: unsupported task:", task)raiseresults = model.train(data=yaml, epochs=epochs, imgsz=640) # train the modelmetrics = model.val() # It'll automatically evaluate the data you trained, no arguments needed, dataset and settings rememberedmodel.export(format="onnx") #, dynamic=True) # export the model, cannot specify dynamic=True, opencv does not support# model.export(format="onnx", opset=12, simplify=True, dynamic=False, imgsz=640)model.export(format="torchscript") # libtorchif __name__ == "__main__":colorama.init()args = parse_args()train(args.task, args.yaml, args.epochs)print(colorama.Fore.GREEN + "====== execution completed ======")以下是使用onnxruntime接口加载onnx文件进行目标检测的实现代码:
namespace {constexpr bool cuda_enabled{ false };
constexpr int image_size[2]{ 640, 640 }; // {height,width}, input shape (1, 3, 640, 640) BCHW and output shape(s) (1, 6, 8400)
constexpr float model_score_threshold{ 0.45 }; // confidence threshold
constexpr float model_nms_threshold{ 0.50 }; // iou threshold#ifdef _MSC_VER
constexpr char* onnx_file{ "../../../data/best.onnx" };
constexpr char* torchscript_file{ "../../../data/best.torchscript" };
constexpr char* images_dir{ "../../../data/images/predict" };
constexpr char* result_dir{ "../../../data/result" };
constexpr char* classes_file{ "../../../data/images/labels.txt" };
#else
constexpr char* onnx_file{ "data/best.onnx" };
constexpr char* torchscript_file{ "data/best.torchscript" };
constexpr char* images_dir{ "data/images/predict" };
constexpr char* result_dir{ "data/result" };
constexpr char* classes_file{ "data/images/labels.txt" };
#endifstd::vector<std::string> parse_classes_file(const char* name)
{std::vector<std::string> classes;std::ifstream file(name);if (!file.is_open()) {std::cerr << "Error: fail to open classes file: " << name << std::endl;return classes;}std::string line;while (std::getline(file, line)) {auto pos = line.find_first_of(" ");classes.emplace_back(line.substr(0, pos));}file.close();return classes;
}auto get_dir_images(const char* name)
{std::map<std::string, std::string> images; // image name, image path + image namefor (auto const& dir_entry : std::filesystem::directory_iterator(name)) {if (dir_entry.is_regular_file())images[dir_entry.path().filename().string()] = dir_entry.path().string();}return images;
}void draw_boxes(const std::vector<std::string>& classes, const std::vector<int>& ids, const std::vector<float>& confidences,const std::vector<cv::Rect>& boxes, const std::string& name, cv::Mat& frame)
{if (ids.size() != confidences.size() || ids.size() != boxes.size() || confidences.size() != boxes.size()) {std::cerr << "Error: their lengths are inconsistent: " << ids.size() << ", " << confidences.size() << ", " << boxes.size() << std::endl;return;}std::cout << "image name: " << name << ", number of detections: " << ids.size() << std::endl;std::random_device rd;std::mt19937 gen(rd());std::uniform_int_distribution<int> dis(100, 255);for (auto i = 0; i < ids.size(); ++i) {auto color = cv::Scalar(dis(gen), dis(gen), dis(gen));cv::rectangle(frame, boxes[i], color, 2);std::string class_string = classes[ids[i]] + ' ' + std::to_string(confidences[i]).substr(0, 4);cv::Size text_size = cv::getTextSize(class_string, cv::FONT_HERSHEY_DUPLEX, 1, 2, 0);cv::Rect text_box(boxes[i].x, boxes[i].y - 40, text_size.width + 10, text_size.height + 20);cv::rectangle(frame, text_box, color, cv::FILLED);cv::putText(frame, class_string, cv::Point(boxes[i].x + 5, boxes[i].y - 10), cv::FONT_HERSHEY_DUPLEX, 1, cv::Scalar(0, 0, 0), 2, 0);}//cv::imshow("Inference", frame);//cv::waitKey(-1);std::string path(result_dir);path += "/" + name;cv::imwrite(path, frame);
}std::wstring ctow(const char* str)
{constexpr size_t len{ 128 };wchar_t wch[len];swprintf(wch, len, L"%hs", str);return std::wstring(wch);
}float image_preprocess(const cv::Mat& src, cv::Mat& dst)
{cv::cvtColor(src, dst, cv::COLOR_BGR2RGB);float resize_scales{ 1. };if (src.cols >= src.rows) {resize_scales = src.cols * 1.f / image_size[1];cv::resize(dst, dst, cv::Size(image_size[1], static_cast<int>(src.rows / resize_scales)));} else {resize_scales = src.rows * 1.f / image_size[0];cv::resize(dst, dst, cv::Size(static_cast<int>(src.cols / resize_scales), image_size[0]));}cv::Mat tmp = cv::Mat::zeros(image_size[0], image_size[1], CV_8UC3);dst.copyTo(tmp(cv::Rect(0, 0, dst.cols, dst.rows)));dst = tmp;return resize_scales;
}template<typename T>
void image_to_blob(const cv::Mat& src, T* blob)
{for (auto c = 0; c < 3; ++c) {for (auto h = 0; h < src.rows; ++h) {for (auto w = 0; w < src.cols; ++w) {blob[c * src.rows * src.cols + h * src.cols + w] = (src.at<cv::Vec3b>(h, w)[c]) / 255.f;}}}
}void post_process(const float* data, int rows, int stride, float xfactor, float yfactor, const std::vector<std::string>& classes,cv::Mat& frame, const std::string& name)
{std::vector<int> class_ids;std::vector<float> confidences;std::vector<cv::Rect> boxes;for (auto i = 0; i < rows; ++i) {const float* classes_scores = data + 4;cv::Mat scores(1, classes.size(), CV_32FC1, (float*)classes_scores);cv::Point class_id;double max_class_score;cv::minMaxLoc(scores, 0, &max_class_score, 0, &class_id);if (max_class_score > model_score_threshold) {confidences.push_back(max_class_score);class_ids.push_back(class_id.x);float x = data[0];float y = data[1];float w = data[2];float h = data[3];int left = int((x - 0.5 * w) * xfactor);int top = int((y - 0.5 * h) * yfactor);int width = int(w * xfactor);int height = int(h * yfactor);boxes.push_back(cv::Rect(left, top, width, height));}data += stride;}std::vector<int> nms_result;cv::dnn::NMSBoxes(boxes, confidences, model_score_threshold, model_nms_threshold, nms_result);std::vector<int> ids;std::vector<float> confs;std::vector<cv::Rect> rects;for (size_t i = 0; i < nms_result.size(); ++i) {ids.emplace_back(class_ids[nms_result[i]]);confs.emplace_back(confidences[nms_result[i]]);rects.emplace_back(boxes[nms_result[i]]);}draw_boxes(classes, ids, confs, rects, name, frame);
}} // namespaceint test_yolov8_detect_onnxruntime()
{// reference: ultralytics/examples/YOLOv8-ONNXRuntime-CPPtry {Ort::Env env = Ort::Env(ORT_LOGGING_LEVEL_WARNING, "Yolo");Ort::SessionOptions session_option;if (cuda_enabled) {OrtCUDAProviderOptions cuda_option;cuda_option.device_id = 0;session_option.AppendExecutionProvider_CUDA(cuda_option);}session_option.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL);session_option.SetIntraOpNumThreads(1);session_option.SetLogSeverityLevel(3);Ort::Session session(env, ctow(onnx_file).c_str(), session_option);Ort::AllocatorWithDefaultOptions allocator;std::vector<const char*> input_node_names, output_node_names;std::vector<std::string> input_node_names_, output_node_names_;for (auto i = 0; i < session.GetInputCount(); ++i) {Ort::AllocatedStringPtr input_node_name = session.GetInputNameAllocated(i, allocator);input_node_names_.emplace_back(input_node_name.get());}for (auto i = 0; i < session.GetOutputCount(); ++i) {Ort::AllocatedStringPtr output_node_name = session.GetOutputNameAllocated(i, allocator);output_node_names_.emplace_back(output_node_name.get());}for (auto i = 0; i < input_node_names_.size(); ++i)input_node_names.emplace_back(input_node_names_[i].c_str());for (auto i = 0; i < output_node_names_.size(); ++i)output_node_names.emplace_back(output_node_names_[i].c_str());Ort::RunOptions options(nullptr);std::unique_ptr<float[]> blob(new float[image_size[0] * image_size[1] * 3]);std::vector<int64_t> input_node_dims{ 1, 3, image_size[1], image_size[0] };auto classes = parse_classes_file(classes_file);if (classes.size() == 0) {std::cerr << "Error: fail to parse classes file: " << classes_file << std::endl;return -1;}for (const auto& [key, val] : get_dir_images(images_dir)) {cv::Mat frame = cv::imread(val, cv::IMREAD_COLOR);if (frame.empty()) {std::cerr << "Warning: unable to load image: " << val << std::endl;continue;}auto tstart = std::chrono::high_resolution_clock::now();cv::Mat rgb;auto resize_scales = image_preprocess(frame, rgb);image_to_blob(rgb, blob.get());Ort::Value input_tensor = Ort::Value::CreateTensor<float>(Ort::MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU), blob.get(), 3 * image_size[1] * image_size[0], input_node_dims.data(), input_node_dims.size());auto output_tensors = session.Run(options, input_node_names.data(), &input_tensor, 1, output_node_names.data(), output_node_names.size());Ort::TypeInfo type_info = output_tensors.front().GetTypeInfo();auto tensor_info = type_info.GetTensorTypeAndShapeInfo();std::vector<int64_t> output_node_dims = tensor_info.GetShape();auto output = output_tensors.front().GetTensorMutableData<float>();int stride_num = output_node_dims[1];int signal_result_num = output_node_dims[2];cv::Mat raw_data = cv::Mat(stride_num, signal_result_num, CV_32F, output);raw_data = raw_data.t();float* data = (float*)raw_data.data;auto tend = std::chrono::high_resolution_clock::now();std::cout << "elapsed millisenconds: " << std::chrono::duration_cast<std::chrono::milliseconds>(tend - tstart).count() << " ms" << std::endl;post_process(data, signal_result_num, stride_num, resize_scales, resize_scales, classes, frame, key);}}catch (const std::exception& e) {std::cerr << "Error: " << e.what() << std::endl;return -1;}return 0;
}labels.txt文件内容如下:仅2类
watermelon 0
wintermelon 1说明:
1.这里使用的onnxruntime版本为1.18.0;
2.windows下,onnxruntime库在debug和release为同一套库,在debug和release下均可执行;
3.通过指定变量cuda_enabled判断走cpu还是gpu流程 ;
4.windows下,onnxruntime中有些接口参数为wchar_t*,而linux下为char*,因此在windows下需要单独做转换,这里通过ctow函数实现从char*到wchar_t的转换;
5.yolov8中提供的sample有问题,需要作调整。
执行结果如下图所示:同样的预测图像集,与opencv dnn结果相似,它们具有相同的后处理流程;下面显示的耗时是在cpu下,gpu下仅20毫秒左右

其中一幅图像的检测结果如下图所示:

GitHub:https://github.com/fengbingchun/NN_Test
相关文章:
使用onnxruntime加载YOLOv8生成的onnx文件进行目标检测
在网上下载了60多幅包含西瓜和冬瓜的图像组成melon数据集,使用 LabelMe 工具进行标注,然后使用 labelme2yolov8 脚本将json文件转换成YOLOv8支持的.txt文件,并自动生成YOLOv8支持的目录结构,包括melon.yaml文件,其内容…...
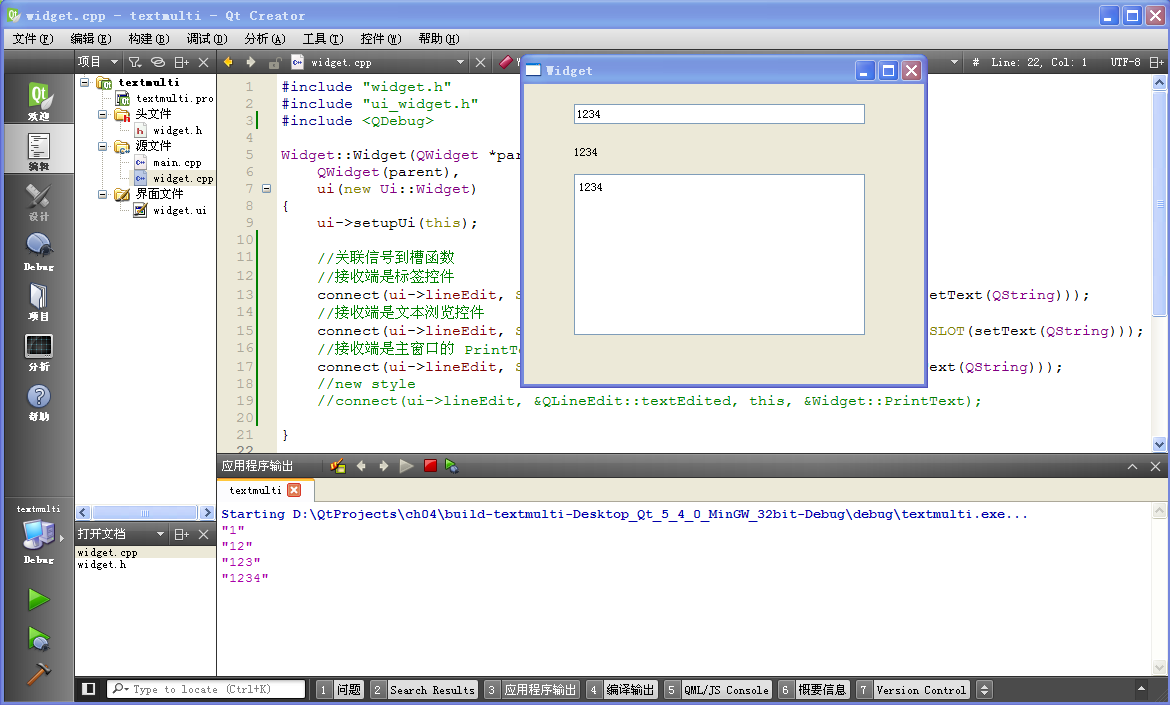
QT 信号和槽 一对多关联示例,一个信号,多个槽函数响应,一个信号源如何绑定多个槽函数
在窗体里放置一个单行文本编辑控件(QLineEdit)、一个标签控件(QLabel)和一个文本浏览控件(QTextBrowser),在单行文 本编辑控件里的文本被编辑时,标签控件和文本浏览控件都会同步显示…...

C++ AVL树 详细讲解
目录 一、AVL树的概念 二、AVL树的实现 1.AVL树节点的定义 2.AVL树的插入 3.AVL树的旋转 4.AVL树的验证 三、AVL树的性能 四、完结撒❀ 一、AVL树的概念 二叉搜索树虽可以缩短查找的效率,但 如果数据有序或接近有序二叉搜索树将退化为单支树,查 …...

Faster R-CNN:端到端的目标检测网络
本文回顾了由微软研究人员开发的 Faster R-CNN 模型。Faster R-CNN 是一种用于物体检测的深度卷积网络,在用户看来,它是一个单一的、端到端的统一网络。该网络可以准确快速地预测不同物体的位置。为了真正理解 Faster R-CNN,我们还必须快速概…...

如何给 MySQL 表和列授予权限?(官方版)
目录 授予表级别权限 授予列级别权限 如何给MySQL表和列授予权限是MySQL数据操作中非常重要的步骤,也是企业级使用MySQL数据库的起步点,以下分别参照官方教程整理的MySQL数据库的权限操作。 以下的语句可以直接使用MySQL的命令行进行操作(如何…...
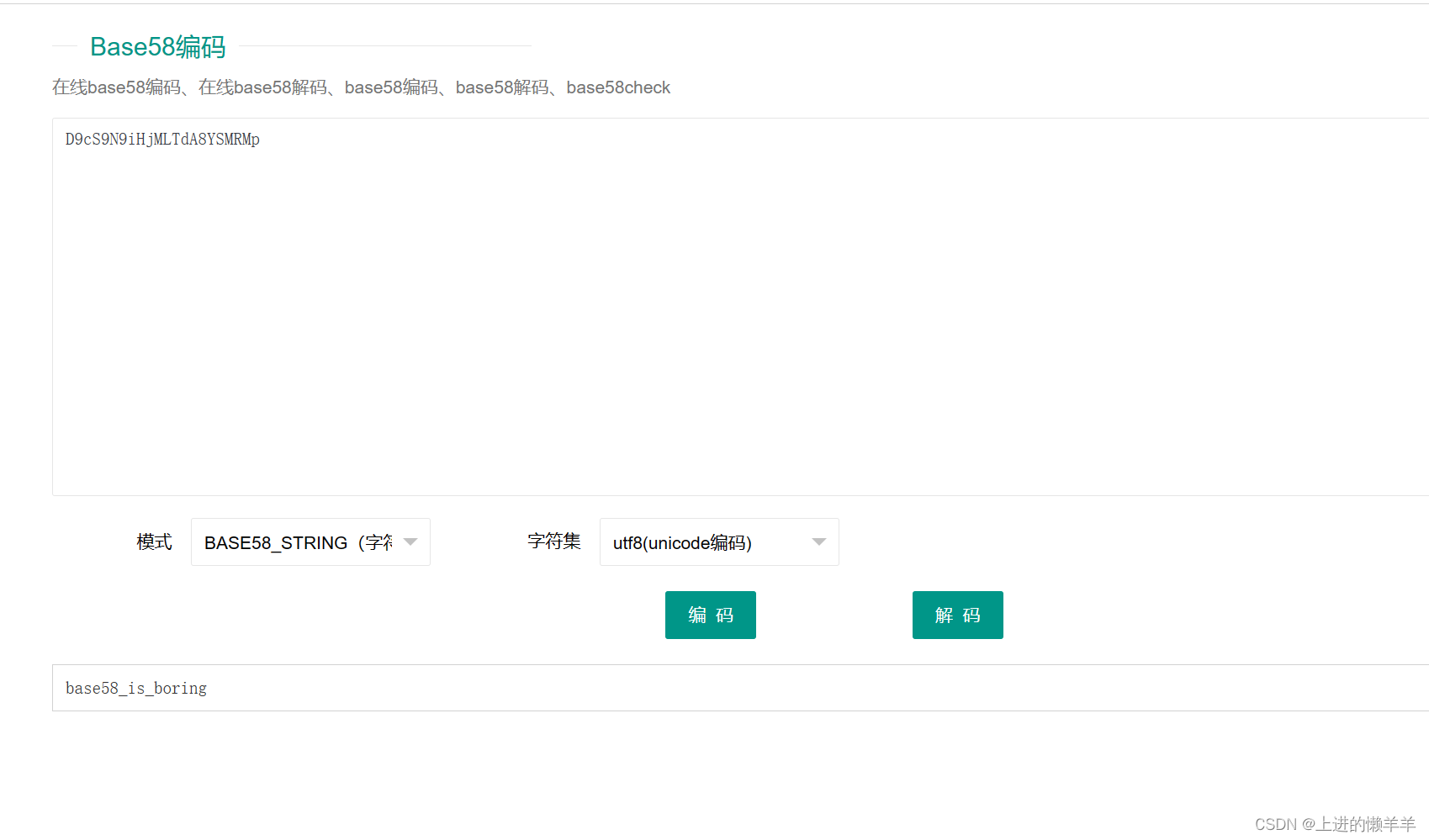
攻防世界testre做法(考点:base58)
在做这道题目之前,我们先来简单了解一下base64加密和base58加密,先来说一些预备知识,bit为1个位,即一个0或1,八个位组成一个字节,即八个二进制数。 base64编码原理:1,在使用base64加…...
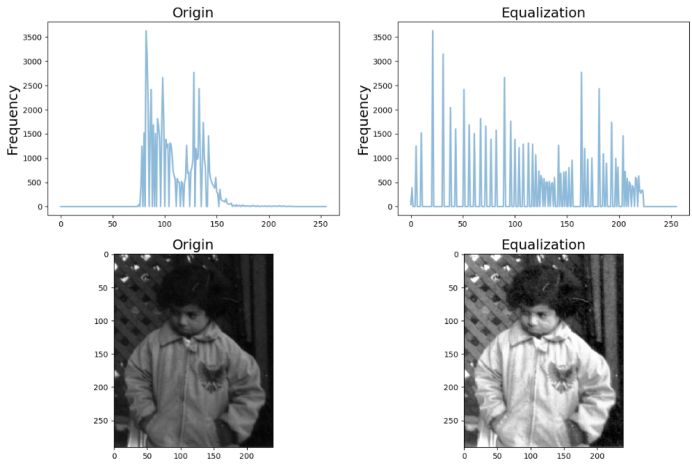
计算机视觉与模式识别实验1-1 图像的直方图平衡
文章目录 🧡🧡实验流程🧡🧡1.读入图像‘rice.png’,在一个窗口中显示灰度级n64,128和256的图像直方图。2.调解图像灰度范围,观察变换后的图像及其直方图的变化。3.分别对图像‘pout.tif’和‘ti…...
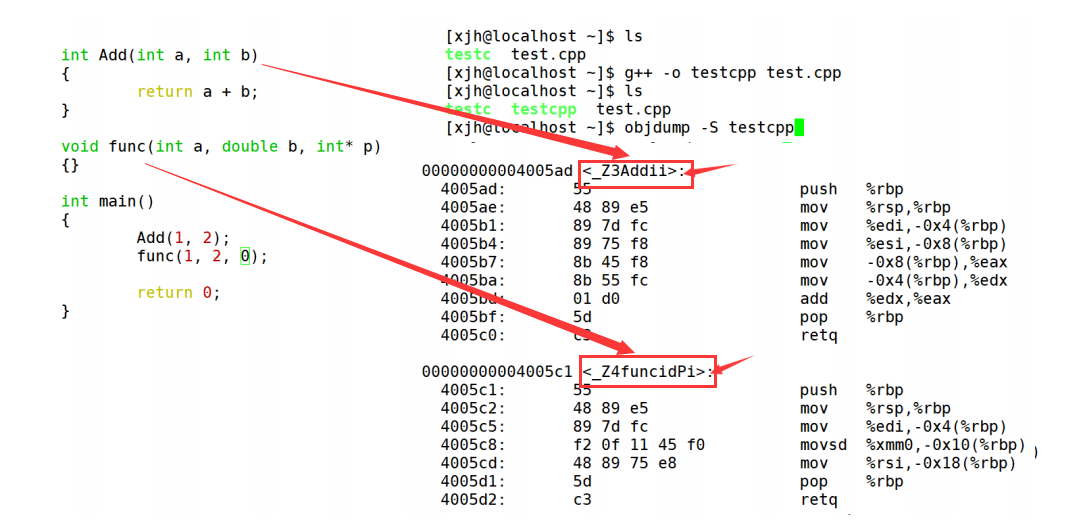
【C++课程学习】:C++入门(函数重载)
🎁个人主页:我们的五年 🔍系列专栏:C课程学习 🎉欢迎大家点赞👍评论📝收藏⭐文章 目录 🌈函数重载: 🍉1.参数个数不同: 🍉2.参数…...

skywalking介绍及搭建
链路追踪框架比对: skywalking安装部署: 下载地址:Downloads | Apache SkyWalking 配置微服务与skywalking整合: copy agent/optional-plugins/apm-spring-cloud-getway-xx.jar到plugins,然后重启skywalking 监控界面…...
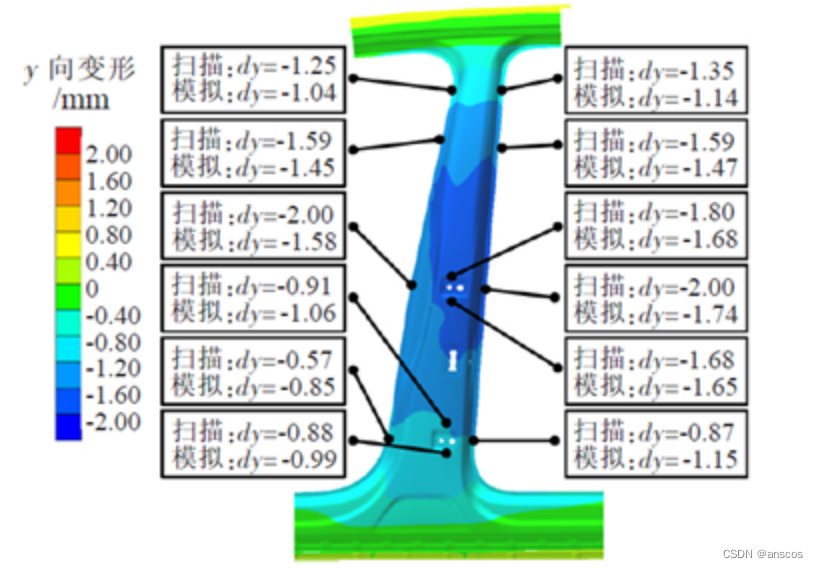
分析示例 | Simufact焊接工艺仿真变形精确预测汽车结构
导语 焊接是汽车制造过程中一个关键环节,白车身、发动机、底盘和变速箱等都离不开焊接工艺的应用,主要涉及气保焊、电阻点焊、激光焊、电子束焊等多种焊接工艺。由于汽车车型众多、成形结构复杂、汽车制造质量、效率、成本等方面的综合要求。如何高效、…...

模式识别选择题
影响K-均值聚类算法效果的主要因素之一是什么? A. 初始聚类中心的选取 B. 样本输入顺序 C. 模式相似性测度 D. 分类准则 答案:A支持向量机(SVM)在处理非线性问题时,通常使用什么方法? A. 引入核函数 B. 增加…...

【Java基础】线程方法
start():启动线程,使线程进入就绪状态。 run():线程执行的代码逻辑,需要重写该方法。 停止线程 void interrupt() 中断线程,让它重新去争抢cpu 如果目标线程长时间等待,则应该使用interrupt方法来中断等待…...

C++之动态数组
C给我们提供了一个叫Vector的类,这个Vector在std命名空间中。这个Vector有点像一个集合,一个不强制其实际元素具有唯一性的集合,和数组一样,但是和C普通的数组又不太一样,和标准的数组不同当你创建Vector时,…...

使用 image-combiner 开源项目实现对海报图片的生成
1:gitee 项目地址 image-combiner: ImageCombiner是一个专门用于Java服务端图片合成的工具,没有很复杂的功能,简单实用,从实际业务场景出发,提供简单的接口,几行代码即可实现图片拼合(当然用于…...

【缓存】框架层常见问题和对策
缓存是为了加快读写速度,再了解redis这类框架层的缓存应用之前,我们不妨先思考下操作系统层面的缓存解决方案,这样有助于我们更深的理解缓存,哪些是系统层面的,哪些是服务层面。 以下是一些常见的缓存问题及其解决方案…...

【FAS】《CN103106397B》
原文 CN103106397B-基于亮瞳效应的人脸活体检测方法-授权-2013.01.19 华南理工大学 方法 / 点评 核心方法用的是传统的形态学和模板匹配,亮点是双红外发射器做差分 差分:所述FPGA芯片控制两组红外光源(一近一远)交替亮灭&…...
3D按F3为什么显示不出模型?---模大狮模型网
对于3D建模软件的用户来说,按下F3键通常是用来显示或隐藏模型的功能之一。然而,有时当按下F3键时,却无法正确显示模型,这可能会让用户感到困惑。模大狮将探讨这种情况发生的可能原因以及解决方法,帮助设计师们更好地理…...
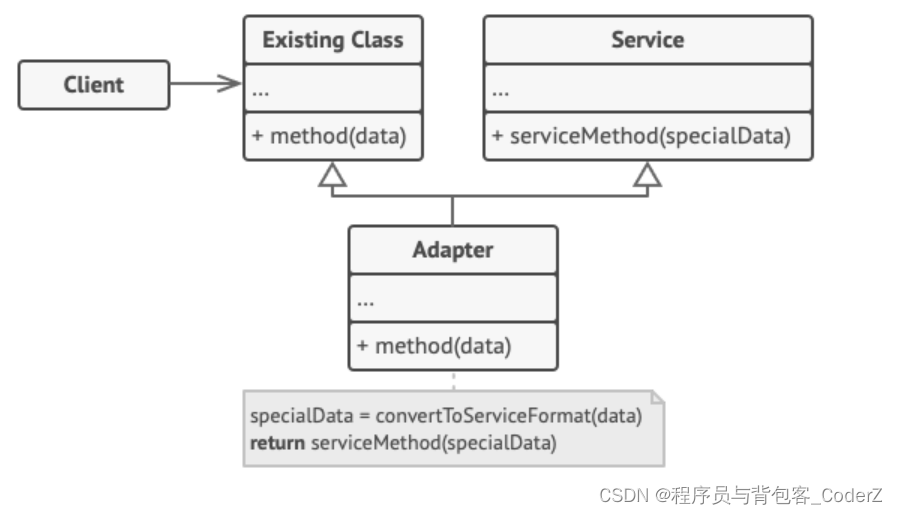
C++设计模式——Adapter适配器模式
一,适配器模式简介 适配器模式是一种结构型设计模式,用于将已有接口转换为调用者所期望的另一种接口。 适配器模式让特定的API接口可以适配多种场景。例如,现有一个名为"Reader()"的API接口只能解析txt格式的文件,给这…...

Python文本处理利器:jieba库全解析
文章目录 Python文本处理利器:jieba库全解析第一部分:背景和功能介绍第二部分:库的概述第三部分:安装方法第四部分:常用库函数介绍1. 精确模式分词2. 全模式分词3. 搜索引擎模式分词4. 添加自定义词典5. 关键词提取 第…...

【C/C++】C语言如何实现类似C++的智能指针?
在C中,智能指针是为了自动化资源管理而引入的工具。比如std::unique_ptr和std::shared_ptr等,它们管理着所持有对象的生命周期,可以在智能指针被销毁时自动释放其所持有的资源。在C语言中,虽然没有直接的智能指针概念,…...

高效处理海量数据——pandas分块读取与内存管理实战
1. 为什么需要分块读取千万级数据? 第一次处理千万级CSV文件时,我盯着16GB的硬盘文件发愁——128GB内存的服务器居然加载到一半就崩溃了。这种场景在金融交易记录、物联网传感器数据、用户行为日志分析中太常见了。pandas默认的read_csv()会一次性把数据…...

SerialMP3库:GD3300D/TD5580A串口MP3模块驱动详解
1. SerialMP3 库概述:面向 GD3300D/TD5580A 串口 MP3 播放模块的嵌入式驱动框架SerialMP3 是一个专为基于 GD3300D 或 TD5580A 音频解码芯片的串口 MP3 播放板设计的 Arduino 兼容库。该库并非通用音频处理中间件,而是一个硬件协议抽象层(Har…...

如何分析竞争对手的seo关键词
<h2>如何分析竞争对手的SEO关键词</h2> <p>在当今竞争激烈的互联网市场中,了解和分析竞争对手的SEO关键词是提升自己网站排名的关键。SEO关键词分析不仅可以帮助你发现市场上的机会,还能让你更好地了解竞争对手的策略,从而…...

**发散创新:策略即代码 —— 用 Rust实现动态权限控制引擎**在现代软件架构中,**权限管理不再是静态配
发散创新:策略即代码 —— 用 Rust 实现动态权限控制引擎 在现代软件架构中,权限管理不再是静态配置的附属品,而是核心业务逻辑的一部分。传统 RBAC(基于角色的访问控制)虽然成熟,但在微服务、多租户和复杂…...

打造专属功能生态:开源工具扩展系统全攻略
打造专属功能生态:开源工具扩展系统全攻略 【免费下载链接】TrafficMonitorPlugins 用于TrafficMonitor的插件 项目地址: https://gitcode.com/gh_mirrors/tr/TrafficMonitorPlugins 开源工具扩展系统是一套基于动态链接库(DLL)的功能…...
优化对话体验:实现多轮深度交流)
文墨共鸣大模型长期记忆(LSTM)优化对话体验:实现多轮深度交流
文墨共鸣大模型长期记忆(LSTM)优化对话体验:实现多轮深度交流 你有没有遇到过这样的情况:和一个智能助手聊天,聊到第三四轮的时候,它好像就忘了你最开始说了什么,回答开始跑偏,或者…...

别再手动飞了!用Python脚本一键操控AirSim无人机,实现自动巡航与悬停
用Python脚本全自动操控AirSim无人机:从基础巡航到复杂航线规划 在无人机仿真测试和算法开发中,手动控制不仅效率低下,更难以保证飞行动作的精确性和可重复性。想象一下,当你需要测试一个新型避障算法,或者采集特定飞行…...

Open Interpreter实时流处理:Kafka消费脚本部署案例
Open Interpreter实时流处理:Kafka消费脚本部署案例 1. 项目背景与需求场景 在实际的数据处理项目中,我们经常需要处理实时数据流。想象一下这样的场景:你的电商平台每秒钟产生成千上万的用户行为数据,这些数据通过Kafka消息队列…...

NVIDIA vGPU许可服务器HA配置避坑指南:从环境准备到故障切换测试
NVIDIA vGPU许可服务器高可用配置实战:从零搭建到容灾验证 在虚拟化与AI计算融合的今天,NVIDIA vGPU技术已成为图形工作站、云游戏和机器学习平台的核心支撑。但许多团队在享受显卡虚拟化红利时,往往忽略了许可服务的高可用保障——当单点故障…...

3大维度解析Awesome Claude Skills:重新定义AI效率边界
3大维度解析Awesome Claude Skills:重新定义AI效率边界 【免费下载链接】awesome-claude-skills A curated list of awesome Claude Skills, resources, and tools for customizing Claude AI workflows 项目地址: https://gitcode.com/GitHub_Trending/aw/awesom…...