LaneKeepingEnv(自动驾驶仿真)
LaneKeepingEnv环境的工作原理可以归纳如下:
- 初始化阶段:
- 环境在创建时,会调用
__init__方法进行初始化。 - 初始化过程中,会设置一些关键的属性,如
lane(当前车道)、lanes(所有车道的列表)、trajectory(车辆的轨迹)等。 - 环境的默认配置参数由
default_config方法定义,这些参数包括观测类型、动作类型、模拟频率等。
- 环境在创建时,会调用
- 配置参数:
- 观测类型设置为
"AttributesObservation",意味着环境会观察车辆的某些属性,如状态、状态导数和参考状态。 - 动作类型设置为
"ContinuousAction",并且指定了转向范围(在-π/3到π/3之间),这意味着控制输入是连续的转向角,不涉及纵向控制。 - 仿真频率和策略频率设置为10,表示每秒钟模拟10次并更新策略10次。
- 还包括了噪声水平、屏幕大小和居中位置等参数,这些参数可能与环境的渲染和可视化有关。
- 观测类型设置为
- 步进过程:
- 在每一步中,环境会调用
step方法。 step方法首先检查当前车辆是否仍在当前车道上。如果不在,它会从lanes列表中取出下一个车道,并设置为当前车道。- 然后,它会调用
store_data方法(尽管该方法在给定的代码片段中未定义),但通常用于存储或更新车辆的轨迹、状态等信息。 - 如果
lpv(可能是车辆控制器)存在,step方法会使用当前动作(控制输入)和车辆状态来设置控制器的控制参数。这里,控制器的控制输入只包括车辆状态的子集,如横向位置和速度,以及相对于车道的偏角和偏角速度。
- 在每一步中,环境会调用
- 控制和仿真:
- 车辆在
LaneKeepingEnv环境中的运动受控制器(如lpv)控制,控制器根据环境提供的观测数据和当前策略产生控制输入。 - 环境会根据控制输入和车辆当前状态更新车辆的位置和状态,并可能渲染车辆在新位置的状态以供观察或评估。
- 车辆在
- 总结:
LaneKeepingEnv环境通过模拟车辆在车道上的运动,提供了一个用于测试车道保持控制策略的平台。- 环境通过提供观测数据、处理控制输入和更新车辆状态来模拟真实世界中的车道保持场景。
- 通过与强化学习算法等结合,可以在该环境中训练和优化车道保持控制策略。
LaneKeepingEnv 环境通常包含以下几个功能模块:
- 初始化模块:
- 负责在环境创建时初始化所有必要的属性,如车道、车辆、观察空间、动作空间等。
- 调用
__init__方法进行初始化,并可能包括读取配置文件或默认配置来设置参数。
- 配置模块:
- 定义环境的默认配置参数,如仿真频率、观察类型、动作类型、噪声水平等。
- 通过
default_config方法提供默认配置,并允许用户通过配置字典来自定义参数。
- 物理模拟模块:
- 负责模拟车辆的物理行为,包括根据控制输入更新车辆状态(位置、速度、加速度等)。
- 可能使用车辆动力学模型(如
BicycleVehicle)来模拟车辆的横向和纵向运动。
- 车道模块:
- 定义和管理车道,包括直线车道和曲线车道(如
StraightLane和SineLane)。 - 提供检查车辆是否在车道内的方法(如
on_lane)。
- 定义和管理车道,包括直线车道和曲线车道(如
- 车辆模块:
- 定义和管理车辆对象,包括车辆的状态(位置、速度、加速度、偏角等)。
- 提供获取车辆状态、设置控制输入和更新车辆状态的方法。
- 观测模块:
- 根据配置的观测类型,提供从环境中获取观测数据的方法。
- 观测数据可能包括车辆的当前状态、状态导数、参考状态等。
- 动作模块:
- 定义动作空间,包括动作的类型(连续或离散)、范围和维度。
- 提供将原始动作转换为环境可以理解的格式的方法(如缩放、裁剪等)。
- 渲染模块(可选):
- 负责环境的可视化,包括渲染车辆、车道和其他相关元素。
- 提供渲染环境状态到屏幕或窗口的方法,以便用户或评估系统可以观察环境的状态。
- 数据存储模块(可选):
- 负责存储环境在仿真过程中产生的数据,如车辆的轨迹、状态、动作等。
- 提供存储和检索数据的方法,以便后续分析和评估。
- 交互模块(可选):
- 允许外部系统与环境进行交互,如接收控制输入、提供奖励信号等。
- 提供与环境交互的接口,如
step方法用于执行一步仿真并返回结果。
在LaneKeepingEnv环境中,模块之间的通讯通常通过函数调用和属性访问来实现。以下是一个简化的例子,说明这些模块如何相互通讯:
1. 初始化模块
- 功能:设置所有模块的初始状态。
- 通讯:
- 调用物理模拟模块的初始化函数,设置物理参数。
- 调用车道模块的初始化函数,创建初始车道。
- 调用车辆模块的初始化函数,设置车辆的初始状态。
2. 物理模拟模块
- 功能:模拟车辆的物理行为。
- 通讯:
- 接收来自车辆模块的车辆当前状态(如位置、速度、加速度)。
- 根据接收到的控制输入(来自动作模块)和车辆当前状态,更新车辆状态。
- 将更新后的车辆状态返回给车辆模块。
3. 车道模块
- 功能:管理车道信息。
- 通讯:
- 提供车道信息(如车道边界、车道中心线)给物理模拟模块,用于车辆状态更新。
- 提供检查车辆是否在车道内的方法给车辆模块或物理模拟模块。
4. 车辆模块
- 功能:管理车辆状态。
- 通讯:
- 提供车辆当前状态给物理模拟模块进行模拟。
- 接收物理模拟模块更新后的车辆状态,并更新自身状态。
- 提供车辆状态给观测模块,用于生成观测数据。
5. 观测模块
- 功能:根据配置生成观测数据。
- 通讯:
- 接收车辆模块提供的车辆状态。
- 根据配置(如观察类型、噪声水平等),生成对应的观测数据。
- 将观测数据提供给外部系统(如强化学习算法)。
6. 动作模块
- 功能:定义动作空间,处理原始动作。
- 通讯:
- 提供动作空间信息给外部系统(如强化学习算法),使其知道如何生成有效的控制输入。
- 接收外部系统生成的原始动作,并根据配置将其转换为环境可以理解的控制输入(如缩放、裁剪)。
- 将控制输入提供给物理模拟模块,用于更新车辆状态。
7. 渲染模块(可选)
- 功能:可视化环境状态。
- 通讯:
- 接收车辆模块提供的车辆状态。
- 接收车道模块提供的车道信息。
- 根据这些信息渲染环境状态到屏幕或窗口。
8. 数据存储模块(可选)
- 功能:存储仿真过程中产生的数据。
- 通讯:
- 接收物理模拟模块提供的车辆轨迹、状态等信息。
- 接收动作模块提供的控制输入。
- 将数据存储到文件、数据库或其他存储介质中。
9. 交互模块(可选)
- 功能:允许外部系统与环境进行交互。
- 通讯:
- 提供
step方法给外部系统,接收控制输入并返回下一步的观测数据、奖励等。 - 可能还需要提供其他接口,如重置环境、获取环境状态等。
- 提供
aneKeepingEnv类是一个用于车道保持控制任务的模拟环境,它继承自AbstractEnv类。车道保持是自动驾驶和车辆控制中的一个重要任务,它要求车辆能够保持在车道内行驶。
以下是该类的一些主要部分和功能的解释:
-
初始化 (
__init__方法):- 初始化环境时,它设置了几个关键的属性,如
lane(当前车道)、lanes(所有车道的列表)、trajectory(车辆的轨迹)、interval_trajectory(可能用于存储某个时间间隔内的轨迹)和lpv(可能是某种车辆控制器的引用,但从给出的代码片段中无法确定其完整含义)。
- 初始化环境时,它设置了几个关键的属性,如
-
默认配置 (
default_config方法):- 这个方法定义了环境的默认配置参数。这些参数包括观测类型、动作类型、模拟频率、策略频率、噪声水平、屏幕大小、缩放比例和居中位置等。
- 观测类型设置为
"AttributesObservation",并指定了要观察的属性(如车辆状态、状态导数和参考状态)。 - 动作类型设置为
"ContinuousAction",并指定了转向范围(在-π/3到π/3之间)和动作是否涉及纵向或横向控制(这里只考虑横向控制)。
-
步进 (
step方法):- 这个方法定义了环境在每一步中的行为。
- 首先,它检查当前车辆是否仍在当前车道上。如果不在,它会从
lanes列表中取出下一个车道,并设置为当前车道。 - 然后,它调用
store_data方法(该方法在给定的代码片段中未定义,但可能用于存储或更新车辆的轨迹、状态等信息)。 - 最后,如果
lpv(可能是车辆控制器)存在,它会使用当前动作(控制输入)和车辆状态来设置控制器的控制参数。这里,控制器的控制输入似乎只包括车辆状态的子集(从给定的代码来看,它只考虑了车辆的横向位置和速度,以及相对于车道的偏角和偏角速度)。
相关文章:
)
LaneKeepingEnv(自动驾驶仿真)
LaneKeepingEnv环境的工作原理可以归纳如下: 初始化阶段: 环境在创建时,会调用__init__方法进行初始化。初始化过程中,会设置一些关键的属性,如lane(当前车道)、lanes(所有车道的列…...
C++类与对象(拷贝与类的内存管理)
感谢大佬的光临各位,希望和大家一起进步,望得到你的三连,互三支持,一起进步 个人主页:LaNzikinh-CSDN博客 文章目录 前言一.对象的动态建立和释放二.多个对象的构造和析构三.深拷贝与浅拷贝四.C类的内存管理总结 前言 …...
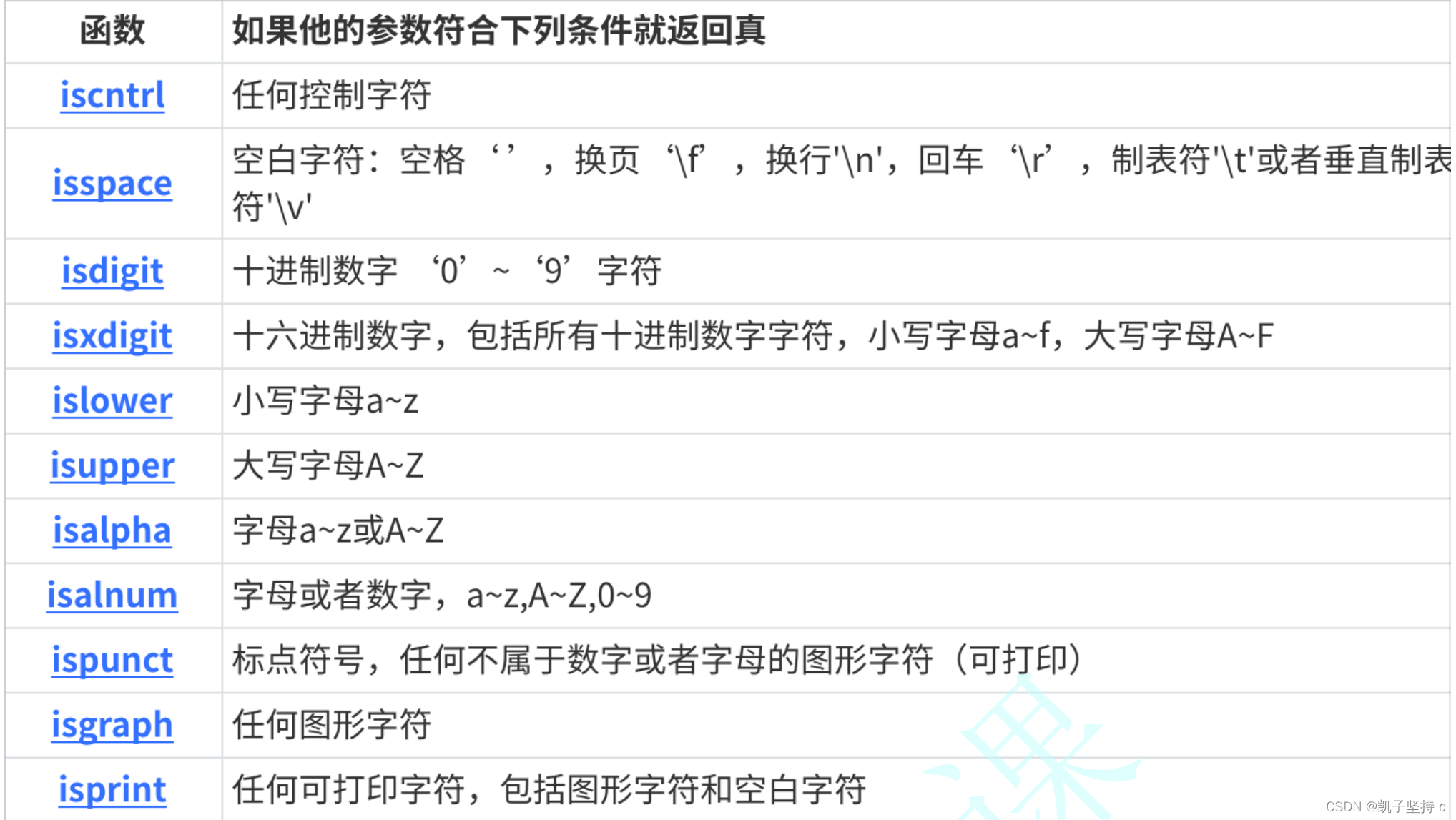
C语言----字符函数和字符串函数
在编程的过程中,我们要经常处理字符和字符串,为了方便操作字符和字符串,c语言标准库中提供的一系列库函数,接下来我们就开始学习与认识他们 1.字符分类函数 c语言中有一系列的函数是专门做字符分类的,也就是一个字符…...
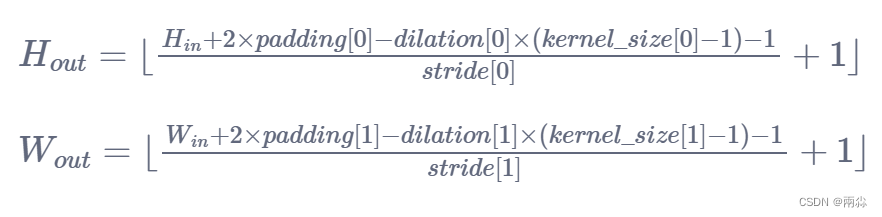
神经网络 torch.nn---Convolution Layers
torch.nn — PyTorch 2.3 documentation torch.nn - PyTorch中文文档 (pytorch-cn.readthedocs.io) torch.nn和torch.nn.functional的区别 torch.nn是对torch.nn.functional的一个封装,让使用torch.nn.functional里面的包的时候更加方便 torch.nn包含了torch.nn.…...
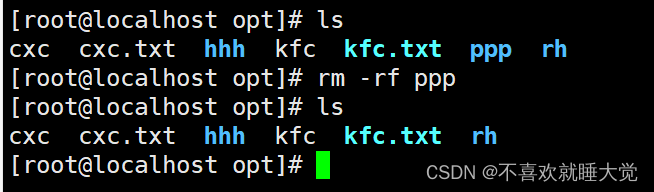
Linux常用基本命令-操作
目录 一、shell 1、什么是shell 二、Linux基本的命令分类 1、内部命令和外部命令 2、查看内部命令 2.1、help命令 2.2、enable 命令 2.3、type命令 2.4、whereis命令 2.5、which 命令 2.6、hash缓存 编辑 三、Linux常用命令 1、Linux命令格式 2、编辑Linux命…...
搭建全文搜索引擎)
从零开始使用 Elasticsearch(8.14.0)搭建全文搜索引擎
Elasticsearch 是目前最常用的全文搜索引擎。它可以快速地存储、搜索和分析海量数据,广泛应用于维基百科、Stack Overflow、Github 等网站。 Elasticsearch 的底层是开源库 Lucene。直接使用 Lucene 需要写大量代码,而 Elasticsearch 对其进行了封装&am…...

流程与IT双驱动:锐捷网络如何构建持续领先的服务竞争力?
AI大模型及相关应用进入“竞赛时代”,算力作为关键要素备受关注,由于算力行业对网络设备和性能有较大需求,其发展也在推动ICT解决方案提供商加速升级,提升服务响应速度和服务质量。 锐捷网络是行业领先的ICT基础设施及行业解决方…...

CopyOnWriteArrayList 详细讲解以及示范
CopyOnWriteArrayList是Java集合框架中的一种线程安全的列表实现,特别适用于读多写少的并发场景。 它是通过“写时复制”(Copy-On-Write)策略来保证线程安全的,这意味着当有线程尝试修改列表时,它会先复制原列表到一个…...
01-Java和Android环境配置
appium是做app自动化测试最火的一个框架,它的主要优势是支持android和ios,同时也支持Java和Python脚本语言。而学习appium最大的难处在于环境的安装配置,本文主要介绍Java和Android环境配置,在后续文章中将会介绍appium的安装和具…...
【qt】视口和窗口坐标
视口和窗口坐标 一.视口和窗口坐标的原理二.视口和窗口坐标的好处三.演示好处四.总结 一.视口和窗口坐标的原理 在绘图事件中进行绘图 void Widget::paintEvent(QPaintEvent *event) {QPainter painter(this);QRect rect(200,0,200,200);painter.drawRect(rect);//设置视口的…...

优化SQL查询的策略和技巧 - AI提供
优化SQL查询以提高处理大型数据集的数据库性能是一个重要课题。 以下是一些关键策略和技巧,可以帮助您提升查询效率: 1、创建合适索引: 针对频繁出现在WHERE、JOIN、ORDER BY和GROUP BY子句中的列创建索引。索引能够显著加速数据检索过程。…...

平安科技智能运维案例
平安科技智能运维案例 在信息技术迅速发展的背景下,平安科技面临着运维规模庞大、内容复杂和交付要求高等挑战。通过探索智能运维,平安科技建立了集中配置管理、完善的运营管理体系和全生命周期运维平台,实施了全链路监控,显著提…...

基于深度学习的向量图预测
基于深度学习的向量图预测 向量图预测(Vector Graphics Prediction)是计算机视觉和图形学中的一个新兴任务,旨在从像素图像(栅格图像)生成相应的向量图像。向量图像由几何图形(如线条、曲线、多边形等&…...
与$rawfile(““)的区别)
鸿蒙HarmonyOS $r(““)与$rawfile(““)的区别
在鸿蒙(HarmonyOS)开发中,$r(“”) 和 $rawfile(“”) 是两种不同的资源引用方式,它们分别用于引用不同的资源类型。 1、$r(“”) $r 函数通常用于引用字符串、颜色、尺寸、样式等定义在资源文件(如 strings.json, c…...

简单了解java中的Collection集合
集合 1、Collection-了解 1.1、集合概述 集合就是一种能够存储多个数据的容器,常见的容器有集合和数组 那么集合和数组有什么区别嘞? 1、集合长度可变,数组的长度不可变 2、集合只能存储引用数据类型(如果要存储基本数据类型…...
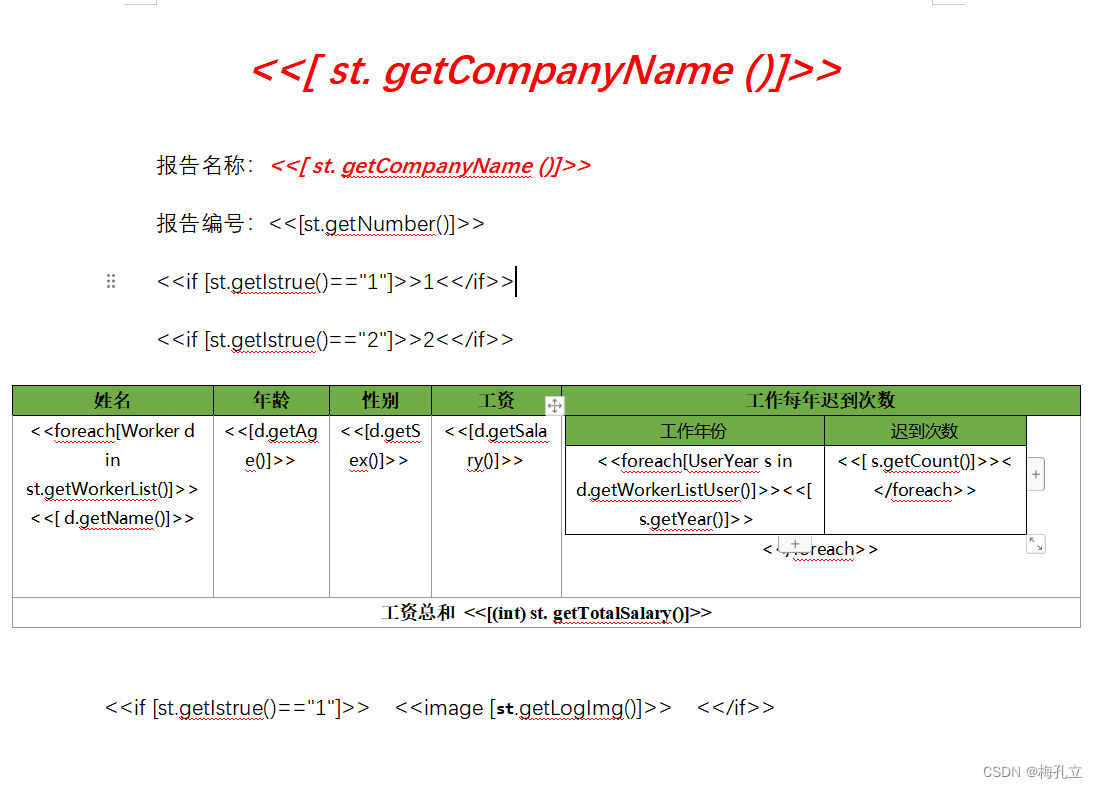
java 实现导出word 自定义word 使用aspose教程包含图片 for 循环 自定义参数等功能
java 实现导出word 主要有一下几个知识点 1,aspose导入 jar包 和 java编写基础代码下载使用 aspose-words jar包导入 aspose jar 包 使用 maven导入java代码编写 2,if判断 是否显示2,显示指定值3,循环显示List 集合列表 使用 fore…...
)
CSS动画(炫酷表单)
1.整体效果 https://mmbiz.qpic.cn/sz_mmbiz_gif/EGZdlrTDJa6yORMSqiaEKgpwibBgfcTQZNV0pI3M8t8HQm5XliaicSO42eBiboEUC3jxQOL1bRe0xlsd8bv04xXoKwg/640?wx_fmtgif&fromappmsg&wxfrom13 表单,也需要具有吸引力和实用性。HTML源码酷炫表单不仅能够提供给用户…...

Stream
Stream 也叫Stream流,是Jdk8开始新增的一套API (java.util.stream.*),可以用于操作集合或者数组的数据。 优势: Stream流大量的结合了Lambda的语法风格来编程,提供了一种更加强大,更加简单的方式操作集合或者数组中的…...

鸿蒙轻内核A核源码分析系列五 虚实映射(5)虚实映射解除
虚实映射解除函数LOS_ArchMmuUnmap解除进程空间虚拟地址区间与物理地址区间的映射关系,其中参数包含MMU结构体、解除映射的虚拟地址和解除映射的数量count,数量的单位是内存页数。 ⑴处函数OsGetPte1用于获取指定虚拟地址对应的L1页表项数据。⑵处计算需要解除的无效…...

编程初学者用什么软件电脑:全方位指南及深度解析
编程初学者用什么软件电脑:全方位指南及深度解析 在数字化浪潮席卷而来的今天,编程技能逐渐成为了一项必备的基本素养。对于初学者来说,选择一款合适的编程软件电脑至关重要。本文将从四个方面、五个方面、六个方面和七个方面,深…...
)
ZFAKA发卡网搭建避坑实录:从YAF扩展安装到目录权限,我踩过的雷你别再踩了(Linux环境)
ZFAKA发卡网Linux搭建实战:关键问题解析与深度排雷指南 第一次在Linux上部署ZFAKA时,我本以为按照教程半小时就能搞定,结果却花了整整两天时间与各种报错信息搏斗。从YAF扩展的诡异报错到目录权限引发的连锁反应,每个环节都暗藏杀…...

状态量: 轮速、滑移率、附着系数
基于分布式驱动电动汽车的路面附着系数估计,分别采用无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF)对电动汽车四个车轮的路面附着系数进行估计。可高速,低速,高附着系数,低附着系数&…...

springboot+vue基于web的线上文印店 校园打印店平台设计与实现
目录功能模块分析关键技术实现扩展功能建议数据模型示例(简化的核心表)部署架构项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作功能模块分析 后端(SpringBoot)功能模块 用户管理…...

GitHub Copilot 默认启用训练之后 企业安全如何应对
文章目录前言一、这次政策改动,到底改了什么二、为什么企业不能只看“Business 和 Enterprise 不受影响”三、content exclusion 为什么挡不住所有风险四、从 IDE 到 Agent,企业研发边界已经变了五、企业现在就该做的几件事总结前言 GitHub 这次关于 Co…...

手把手教你用SRIO IP核实现FPGA与DSP间高速数据互传:基于AXI-Stream接口的实战
基于SRIO IP核的FPGA与DSP高速数据互传实战指南 在异构计算系统中,FPGA与DSP的高效协同已成为雷达信号处理、无线通信基带处理等领域的核心技术需求。传统的数据传输方式如SPI、UART等已无法满足现代系统对带宽和实时性的严苛要求,而Serial RapidIO&…...

3步精通Calibre电子书转换:从格式兼容到专业排版指南
3步精通Calibre电子书转换:从格式兼容到专业排版指南 【免费下载链接】calibre The official source code repository for the calibre ebook manager 项目地址: https://gitcode.com/GitHub_Trending/ca/calibre 在数字阅读时代,电子书格式碎片化…...

百度大模型二面:有微调过 Agent 能力吗?数据集如何收集?
1. 问题分析做 Agent 的团队很多,但真正动手微调过 Agent 能力的人并不多。大部分人停留在 Prompt 闭源 API 的阶段就基本上交差了,只有当你真的需要在开源模型上把 Agent 跑起来、或者对工具调用的稳定性有极致要求时,才会走到微调这一步。…...

智能求职工具GetJobs:让你的投递效率提升300%的全流程指南
智能求职工具GetJobs:让你的投递效率提升300%的全流程指南 【免费下载链接】get_jobs 💼【找工作最强助手】全平台自动投简历脚本:(boss、前程无忧、猎聘、拉勾、智联招聘) 项目地址: https://gitcode.com/gh_mirrors/ge/get_jobs 每天…...

语音播报 文字转语音 edge_tts
推理队列封装import asyncio import edge_tts import time from threading import Thread from queue import Queue, Empty import osdef tts_sync_stream(text, voice"zh-CN-XiaoxiaoNeural"):"""同步流式生成(内部用 async)&…...

OpenClaw内容创作流水线:nanobot镜像从选题到发布的自动化
OpenClaw内容创作流水线:nanobot镜像从选题到发布的自动化 1. 为什么需要内容创作自动化 作为一名技术博主,我每天都要面对一个永恒难题:如何在有限时间内持续产出高质量内容。传统写作流程需要经历选题调研、大纲设计、初稿撰写、SEO优化、…...