linux为什么不是实时操作系统
Linux为什么不是实时操作系统?
从我们接触Linux系统开始,一直听到的都是它是非实时操作系统,怎么理解这个非实时呢?
我的理解,非实时,就是中断响应不及时,任务调度不及时。那么,真的是这样吗?下面先了解一下,Linux中断响应,是怎样的一个处理流程。
Linux是如何响应中断
ARM中断流程
ARM处理器的中断处理过程,可以分为以下几个步骤:
- 中断请求:外部设备或软件可以向ARM处理器发送中断请求信号,以通知处理器有需要处理的事件发生。中断请求可以是硬件中断(如外部设备的输入触发中断)或软件中断(通过软件指令触发中断)。
- 中断检测:ARM处理器会周期性地检测中断请求是否发生。这个过程通常在每个指令周期的某个时刻进行,被称为中断检测阶段。如果检测到中断请求,处理器将进入中断处理流程。
- 中断响应:当ARM处理器检测到中断请求时,它会保存当前的执行状态,并跳转到中断服务例程(ISR,Interrupt Service Routine)的入口地址。
- 中断处理:进入中断服务例程后,ARM处理器将执行特定的中断处理代码,以完成对中断事件的处理。中断服务例程通常包括保存现场、处理中断事件、恢复现场等步骤。
- 中断返回:在中断处理完成后,ARM处理器会从中断服务例程返回到原来的执行状态。处理器会恢复之前保存的现场,并继续执行被中断的指令。
我们在上面的第三步,存在一个保存现场的过程,它主要进行以下逻辑:
ARM异常处理:处理器对特定的异常事件进行的处理流程(CPU指导硬件自动完成:四大步三小步)。
一、保存现场(四大步):
-
保存CPSR到SPSR_mode
-
适当设置 CPSR 对应功能位(三小步):
a. 切换处理器进入ARM状态:T[5]
b. 根据需要,禁止中断位:F[6] / I[7]
c. 根据异常切换到对应的异常模式:M[4:0] -
保存返回地址:把当前 PC 保存到 lr_mode
-
设置PC = 存放跳转到对应的异常向量表的固定首地址。
Linux的中断入口
我们关注中断响应和中断处理的过程,以ARM A55为例,Linux内核中,中断向量表在 arch/arm64/kernel/entry.S 中有定义:
/** Exception vectors.*/.pushsection ".entry.text", "ax".align 11
SYM_CODE_START(vectors)kernel_ventry 1, t, 64, sync // Synchronous EL1tkernel_ventry 1, t, 64, irq // IRQ EL1tkernel_ventry 1, t, 64, fiq // FIQ EL1hkernel_ventry 1, t, 64, error // Error EL1tkernel_ventry 1, h, 64, sync // Synchronous EL1hkernel_ventry 1, h, 64, irq // IRQ EL1hkernel_ventry 1, h, 64, fiq // FIQ EL1hkernel_ventry 1, h, 64, error // Error EL1hkernel_ventry 0, t, 64, sync // Synchronous 64-bit EL0kernel_ventry 0, t, 64, irq // IRQ 64-bit EL0kernel_ventry 0, t, 64, fiq // FIQ 64-bit EL0kernel_ventry 0, t, 64, error // Error 64-bit EL0kernel_ventry 0, t, 32, sync // Synchronous 32-bit EL0kernel_ventry 0, t, 32, irq // IRQ 32-bit EL0kernel_ventry 0, t, 32, fiq // FIQ 32-bit EL0kernel_ventry 0, t, 32, error // Error 32-bit EL0
SYM_CODE_END(vectors)
而这个向量表,又是在什么时候设置到CPU的呢?
在 arch/arm64/kernel/head.S 中,有以下汇编代码:
/** The following fragment of code is executed with the MMU enabled.** x0 = __PHYS_OFFSET*/
SYM_FUNC_START_LOCAL(__primary_switched)adr_l x4, init_taskinit_cpu_task x4, x5, x6adr_l x8, vectors // load VBAR_EL1 with virtualmsr vbar_el1, x8 // vector table addressisb...SYM_FUNC_END(__primary_switched)
从上面可以看到,将 vectors 的地址写入 vbar_el1 寄存器。
Exception level的Vector Base Address Register (VBAR)寄存器,该寄存器保存了各个exception level的异常向量表的基地址。该寄存器有三个,分别是VBAR_EL1,VBAR_EL2,VBAR_EL3。
为什么 vectors 会有 4x4 个向量呢?
exceptions
在ARM.v8体系结构中,中断只是异常的一种类型,异常有4种类型。
- 同步异常:这种类型的异常总是由当前执行的指令引起。例如。可以使用
str指令将一些数据存储在不存在的内存位置。在这种情况下,将生成同步异常。同步异常也可以用于生成软件中断。软件中断是由svc指令有意产生的同步异常。 - IRQ(中断请求):这些是正常的中断。它们始终是异步的,这意味着它们与当前执行的指令无关。与同步异常相反,它们始终不是由处理器本身生成的,而是由外部硬件生成的。
- FIQ(快速中断请求):这种类型的异常称为
快速中断,仅出于优先处理异常的目的而存在。可以将某些中断配置为“正常”,将其他中断配置为“快速”。快速中断将首先发出信号,并将由单独的异常处理程序处理。Linux不使用快速中断。 - SError(系统错误):像
IRQ和FIQ一样,SError异常是异步的,由外部硬件生成。与IRQ和FIQ不同,SError始终表示某种错误情况。
异常向量
每种异常类型都需要有自己的处理程序。另外,同一种异常类型下不同的状态也需要定义单独的处理程序。典型的有4种状态,以EL1 为例,这些状态可以定义如下:
- EL1t 与EL0共享堆栈指针时,
EL1发生异常。当SPSel寄存器的值为0时,就会发生这种情况。 - EL1h 为EL1分配了专用堆栈指针时,EL1发生了异常。这意味着
SPSel拥有值1,这是我们当前正在使用的模式。 - EL0_64 以64位模式执行的EL0产生异常。
- EL0_32 以32位模式执行的EL0产生异常。
总共,我们需要定义16个异常处理程序(4个异常级别乘以4个执行状态)。
当外部gpio中断来了的时候,我们进入的是IRQ EL1h,当访问内存产生的缺页异常,进入的是Synchronous EL1h。
当外部gpio中断来了,查询向量表,满足kernel_ventry 1, h, 64, irq,kernel_ventry 是在 arch/arm64/kernel/entry.S 实现的一个函数,上面展开后,就是调用 el1h_64_irq 这个函数。el1h_64_irq 还是一个汇编宏展开,在 arch/arm64/kernel/entry.S 有这样的代码:
.macro entry_handler el:req, ht:req, regsize:req, label:req
SYM_CODE_START_LOCAL(el\el\ht\()_\regsize\()_\label)kernel_entry \el, \regsizemov x0, spbl el\el\ht\()_\regsize\()_\label\()_handler.if \el == 0b ret_to_user.elseb ret_to_kernel.endif
SYM_CODE_END(el\el\ht\()_\regsize\()_\label).endm/** Early exception handlers*/...entry_handler 1, h, 64, irq...
可以看到,通过SYM_CODE_START_LOCAL定义函数,在 kernel_entry 中做寄存器数据入栈等现场保护,然后bl跳转到 el1h_64_irq_handler,而el1h_64_irq_handler则是C语言实现的代码了。
el1h_64_irq_handler
el1h_64_irq_handler实际上是在 el1_interrupt 的基础上,再调用handle_arch_irq函数,在看handle_arch_irq函数之前,我们先看看el1_interrupt 都做了哪些操作。
el1_interrupt的逻辑:
- 关外部中断;
- 通过 do_interrupt_handler 调用到中断处理函数,do_interrupt_handler 会判断当前是否在任务的栈上,如果在栈上还需要保存现场,否则直接调用handle_arch_irq;
- 通过 arm64_preempt_schedule_irq 函数进行抢占式调度任务;
- 开外部中断;
上面的handle_arch_irq就是一个函数指针,以gicv3为例,该函数指针指向的是gic_handle_irq()。
gic_handle_irq
- do_read_iar 获取中断号;
- 检查是否支持NMI(非屏蔽中断),并读取RPR(运行优先级寄存器)的值。如果RPR的值等于GICD_INT_RPR_PRI(GICD_INT_NMI_PRI)则调用gic_handle_nmi()函数来处理NMI;
- 检查是否启用了GIC(通用中断控制器)的优先级屏蔽功能。如果启用了,则调用gic_pmr_mask_irqs()函数来屏蔽中断,并调用gic_arch_enable_irqs()函数来启用中断;
- gic_complete_ack将中断ID写入ICC_EOIR1_EL1寄存器来停止这个中断,我理解应该是类似清除gic的中断pending位信息;
- 接下来就是调用中断处理函数handle_domain_irq;
handle_domain_irq
- irq_resolve_mapping 通过hwirq查找irq_desc;
- 接着调用handle_irq_desc函数来处理中断描述符irq_desc,里面重点是调用 irq_desc->handle_irq 函数;
- 这个irq_desc->handle_irq函数由irq_chip->irq_nmi_teardown设置,SGI/PPI/EPPI对应handle_percpu_devid_irq,其他对应handle_fasteoi_irq。
- 最终handle_fasteoi_irq会调用action->handler来执行中断处理函数,这个action->handler就是我们通过request_irq或者request_threaded_irq设置的中断处理函数;
针对这个,建议查看参考文章i.MX8MP平台开发分享(gicv3篇)-- gic_handle_irq如何跳转到自定义的中断线程处理函数,里面针对硬件寄存器的介绍也比较详细。
中断的实时性讨论
在没有进行上面的代码跟进的时候,我之前一直以为,linux的中断非实时,是因为Linux系统在获知硬件中断之后,仅仅是立马清除了中断的pending信息,等到合适的时间再去进行中断函数的处理,从而导致中断非实时。但是从上面的代码分析下来发现,我之前的理解都是错误的,可以说,Linux系统在不关中断的情况下,只要产生了中断,都是会立马处理中断的。
那么为什么说Linux中断是非实时的呢?
因为Linux太多关闭中断的地方了,如上面,在处理中断的时候,关闭了中断(Linux不允许中断嵌套);在系统进入临界区的时候会调用spin_lock_irqsave等,关闭中断的地方多了,影响外部中断的时候,就需要等待使能中断后才可以响应,从而不满足非实时。
而像RT Linux,为了提高中断实时性,它主要进行了以下几点的修改:
- 临界区可抢占,将spinlock修改为可抢占类型,避免大量的关闭中断;
- 中断处理线程化,减少关闭中断的时间;
从RT Linux的修改,都是为了减少关闭中断的时间来提高实时性。从这个方面去理解Linux的中断非实时,就更容易理解了吧。
Linux任务什么时候调度
首先,Linux的进程是抢占式的,内核配置CONFIG_PREEMPT默认是开启的,当一个高优先级的进入可运行状态,内核将会检查它的动态优先级是否大于当前正在运行进程的优先级。如果是,当前运行的进程将会被中断,并调用调度程序选择另外一个程序运行。
在中断处理完之后,任务也会有机会发生调度,具体的代码段如下:
// arch/arm64/kernel/entry-common.cstatic void noinstr el1_interrupt(struct pt_regs *regs,void (*handler)(struct pt_regs *))
{write_sysreg(DAIF_PROCCTX_NOIRQ, daif);enter_el1_irq_or_nmi(regs);do_interrupt_handler(regs, handler);/** Note: thread_info::preempt_count includes both thread_info::count* and thread_info::need_resched, and is not equivalent to* preempt_count().*/if (IS_ENABLED(CONFIG_PREEMPTION) &&READ_ONCE(current_thread_info()->preempt_count) == 0)arm64_preempt_schedule_irq(); //可抢占,则发生调度exit_el1_irq_or_nmi(regs);
}
时常我们会说,从内核返回用户空间的时候,也会发生任务调度,这个从用户空间进入内核的时候,也是通过异常进入的(或者说是软中断,PPI?),实际上这个和中断应该是没有本质的区别吧?所以他们归类为一种,都是异常处理后的任务调度。
最后,还有一种是时间片用完之后的任务调度,这个就很好理解了,给你的时间用完了,就要切换出去,不能让你自己一个人玩。
参考:
ARM中断处理过程及编程实例
ARM-中断状态,中断响应流程(四大步三小步)
ARM64 kernel exception vectors
i.MX8MP平台开发分享(gicv3篇)-- gic_handle_irq如何跳转到自定义的中断线程处理函数
【进程】preempt_count解析
[工业互联-15]:Linux操作与实时Linux操作系统RT Linux( PREEMPT-RT、Xenomai)
【进程调度】执行调度的时机
相关文章:

linux为什么不是实时操作系统
Linux为什么不是实时操作系统? 从我们接触Linux系统开始,一直听到的都是它是非实时操作系统,怎么理解这个非实时呢? 我的理解,非实时,就是中断响应不及时,任务调度不及时。那么,真…...
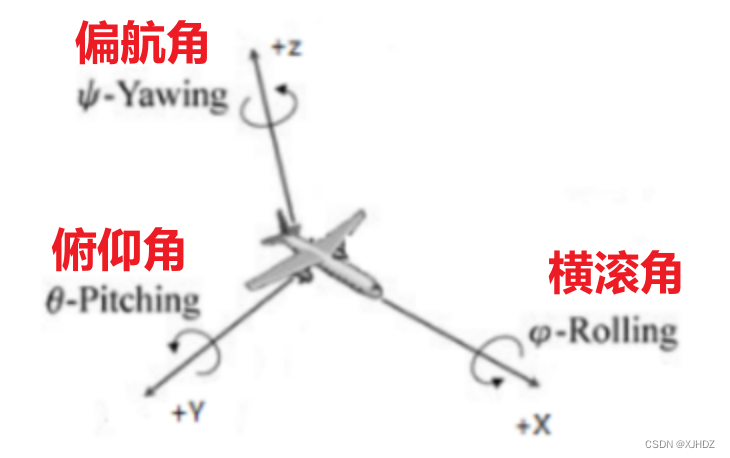
【STM32】飞控设计
【一些入门知识】 1.飞行原理 【垂直运动】 当 mg>F1F2F3F4,此时做下降加速飞行 当 mg<F1F2F3F4,此时做升高加速飞行 当 mgF1F2F3F4 ,此时垂直上保持匀速飞行。 【偏航飞行】 ω 4 ω 2 ≠ ω 1 ω 3 就会产生水…...

MySQL CDC
一、MySQL CDC概念 MySQL CDC(Change Data Capture),即MySQL变更数据捕获,是一种能够捕获MySQL数据库中数据变化(包括插入、更新和删除操作)的技术。这些变化可以实时或准实时地同步到其他系统或服务中&am…...

手把手教你安装 Vivado2022.2(附安装包)
一、Vivado 2022.2 优势 Vivado 2022.2版本与之前的版本相比,具有以下几个显著的优势: 电源设计管理器(PDM):Vivado 2022.2引入了全新的电源设计管理器(PDM),这是一个下一代功耗评…...

旅行者1号有什么秘密?飞行240多亿公里,为什么没发生碰撞?
旅行者1号有什么秘密?飞行240多亿公里,为什么没发生碰撞? 自古以来,人类就对浩瀚无垠的宇宙充满了好奇与向往。从最初的仰望星空,到如今的深空探测,人类探测宇宙的历史发展可谓是一部波澜壮阔的史诗。 在…...

如何保护云主机安全
在数字化时代,云服务器已成为企业数据存储、处理和传输的重要工具。然而,随着其应用的广泛和深入,云服务器也面临着越来越多的安全威胁。为了应对这些威胁,白名单技术应运而生,成为保护云服务器安全的重要手段。 首先&…...

postman教程-19-mock测试
上一小节我们学习了Postman接口参数化方法,本小节我们讲解一下Postman mock测试的方法。 一、什么叫mock测试 mock测试就是在测试过程中,对某些不容易构造或者不容易获取的对象,用一个虚拟的对象来创建以便于测试的一种测试方法,…...

纳秒级网络库【二】技术选型
在十年之前,已经有网络产品实现7纳秒延迟,所以无需质疑是否能够实现,关键问题是:代价是什么。国内不少量化公司在招聘低延迟总线的开发人员,虽然我不知道他们具体的技术选型,从技术底层来看,并没…...
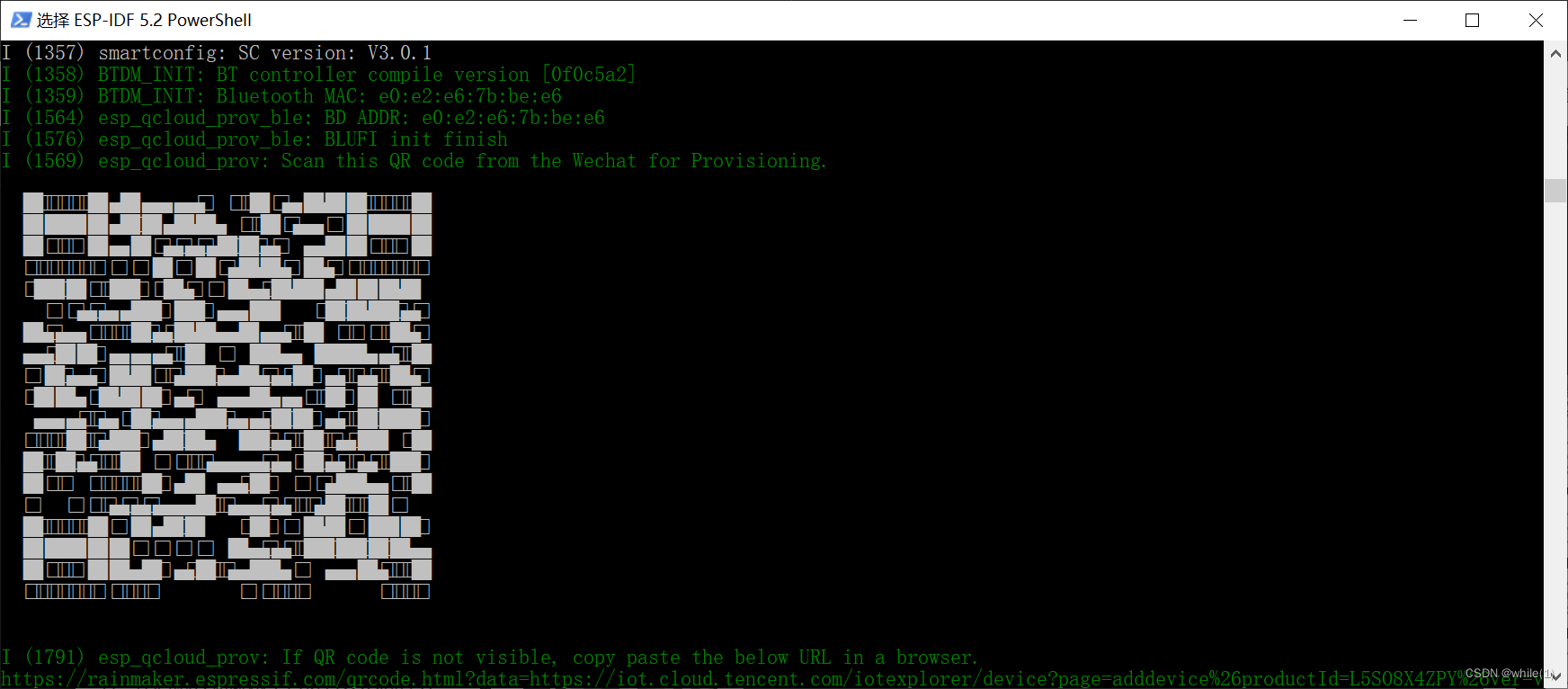
ESP32基础应用之esp32连接腾讯云并使用微信小程序控制的智能灯
文章目录 1. 项目简介1.1 功能接收1.2 使用资源1.3 测试平台 2 腾讯云物联网开发平台3 esp32设备开发3.1 准备参考例程3.2 vscode平台创建测试工程3.3 修改工程 问题总结使用PowerShell命令行终端生成的二维码不能用 1. 项目简介 1.1 功能接收 实现腾讯云创建项目与设备&…...
Unity Protobuf+RPC+UniTask
远程过程调用(RPC)协议详解 什么是RPC协议RPC的基本原理RPC的关键组件RPC的优缺点Protobuf函数绑定CallEncodeRecvDecodeSocket.Send和Recv项目地址 什么是RPC协议 远程过程调用(Remote Procedure Call,简称RPC)是一种…...
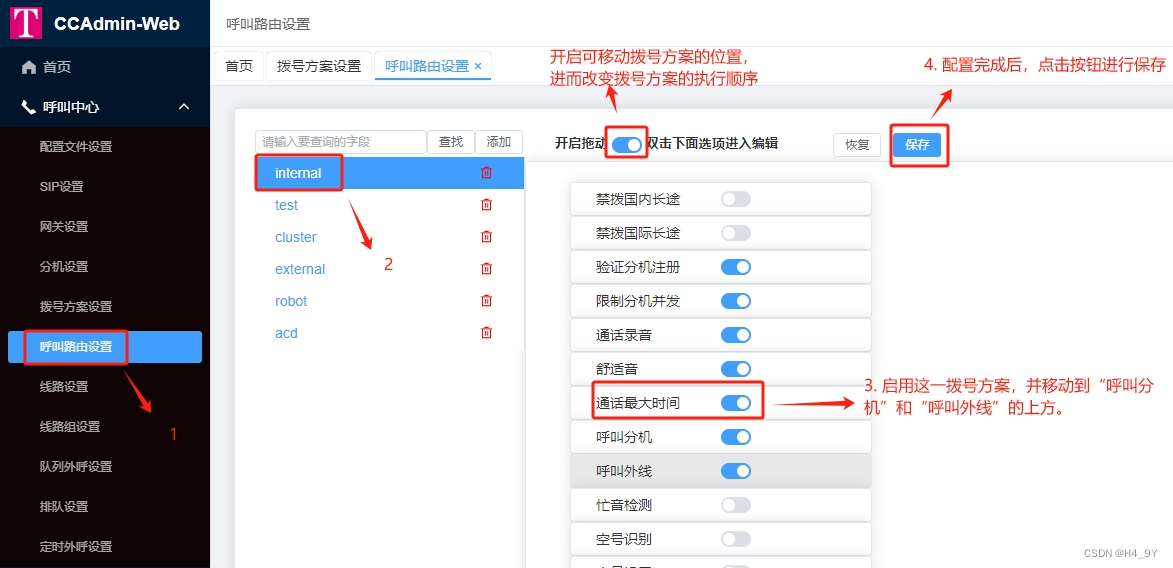
顶顶通呼叫中心中间件(mod_cti基于FreeSWITCH)-通话时长限制
文章目录 前言联系我们场景运用机器人场景普通通话场景 前言 顶顶通呼叫中心中间件限制通话时长有两种写法,分别作用于机器人场景与普通通话场景。 普通场景可分为分机互打、分机外呼手机等。 联系我们 有意向了解呼叫中心中间件的用户,可以点击该链接…...
如何将ai集成到项目中,方法二
上一篇文章:如何将ai集成到radsystems项目中,在项目中引入ai-CSDN博客 上一篇文章内容主要针对于未实现权限分离的项目,这篇文章主要来说一下权限分离的项目怎么做,以及注意的细节。 一、编写前端router.js 二、编写前端askai.vu…...

python的变量的引用与赋值的学习
看代码: a 1 # 初始化变量a,赋值为1 b a # 变量b被赋值为变量a的值,此时b的值也为1 b 2 # 变量b被重新赋值为2 print(a) # 打印变量a的值 执行过程如下: a 1:变量a被赋值为1。b a:变量b被赋值为…...

【FPGA项目】bin文件ram存取回环测试
🎉欢迎来到FPGA专栏~bin文件ram存取回环测试 ☆* o(≧▽≦)o *☆嗨~我是小夏与酒🍹 ✨博客主页:小夏与酒的博客 🎈该系列文章专栏:FPGA学习之旅 文章作者技术和水平有限,如果文中出现错误,希望大…...
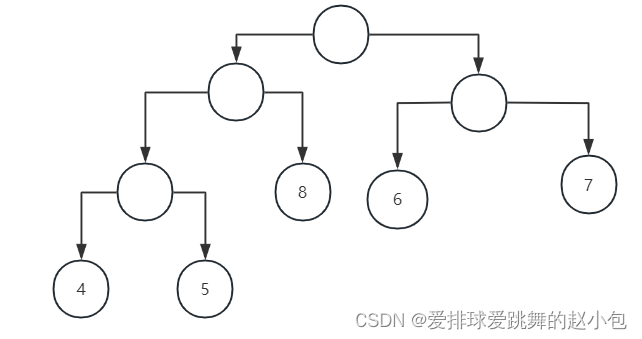
北航数据结构与程序设计第五次作业选填题复习
选填题考的很多都是基础概念,对于巩固复习一些仡佬拐角的知识点是很有用的。非北航学生也可以来看看这些题,这一节主要是树方面的习题: 一、 我们首先需要知道一个公式 这是证明: 知道了这个公式,我们把题目中的数据…...
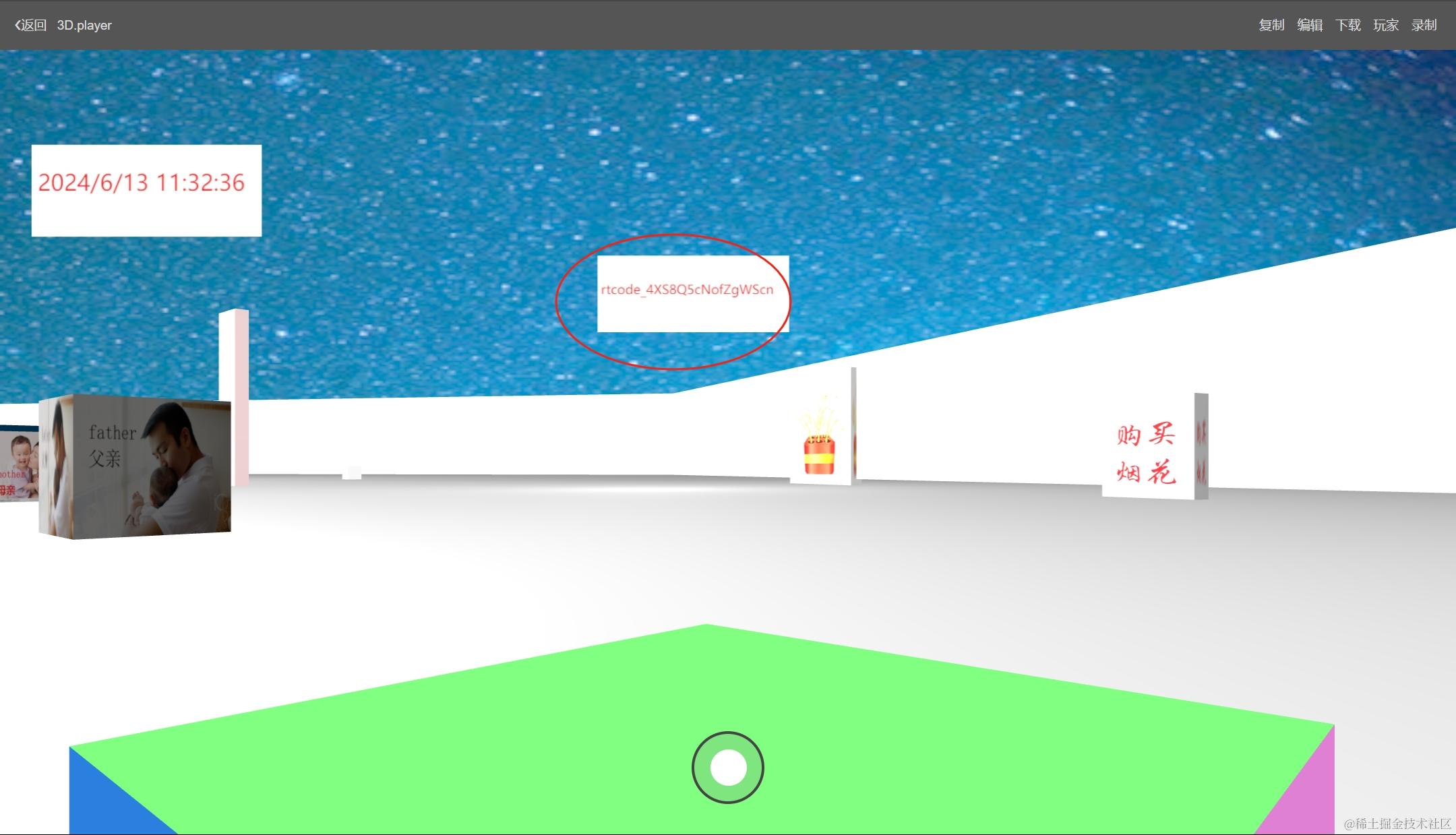
【WEB前端2024】3D智体编程:乔布斯3D纪念馆-第40课-实时订阅后端数据
【WEB前端2024】3D智体编程:乔布斯3D纪念馆-第40课-实时订阅后端数据 使用dtns.network德塔世界(开源的智体世界引擎),策划和设计《乔布斯超大型的开源3D纪念馆》的系列教程。dtns.network是一款主要由JavaScript编写的智体世界引…...

系统集成知识科普:核心原理与关键技术
目录 1.系统集成的核心原理 1.1 模块化原理 1.1.1 定义: 1.1.2 优势: 1.1.3 实现方式: 1.2 标准化原理 1.2.1 定义: 1.2.2 作用: 1.2.3 实践案例: 1.2.4 制定与遵循: 1.3 协同性原理…...

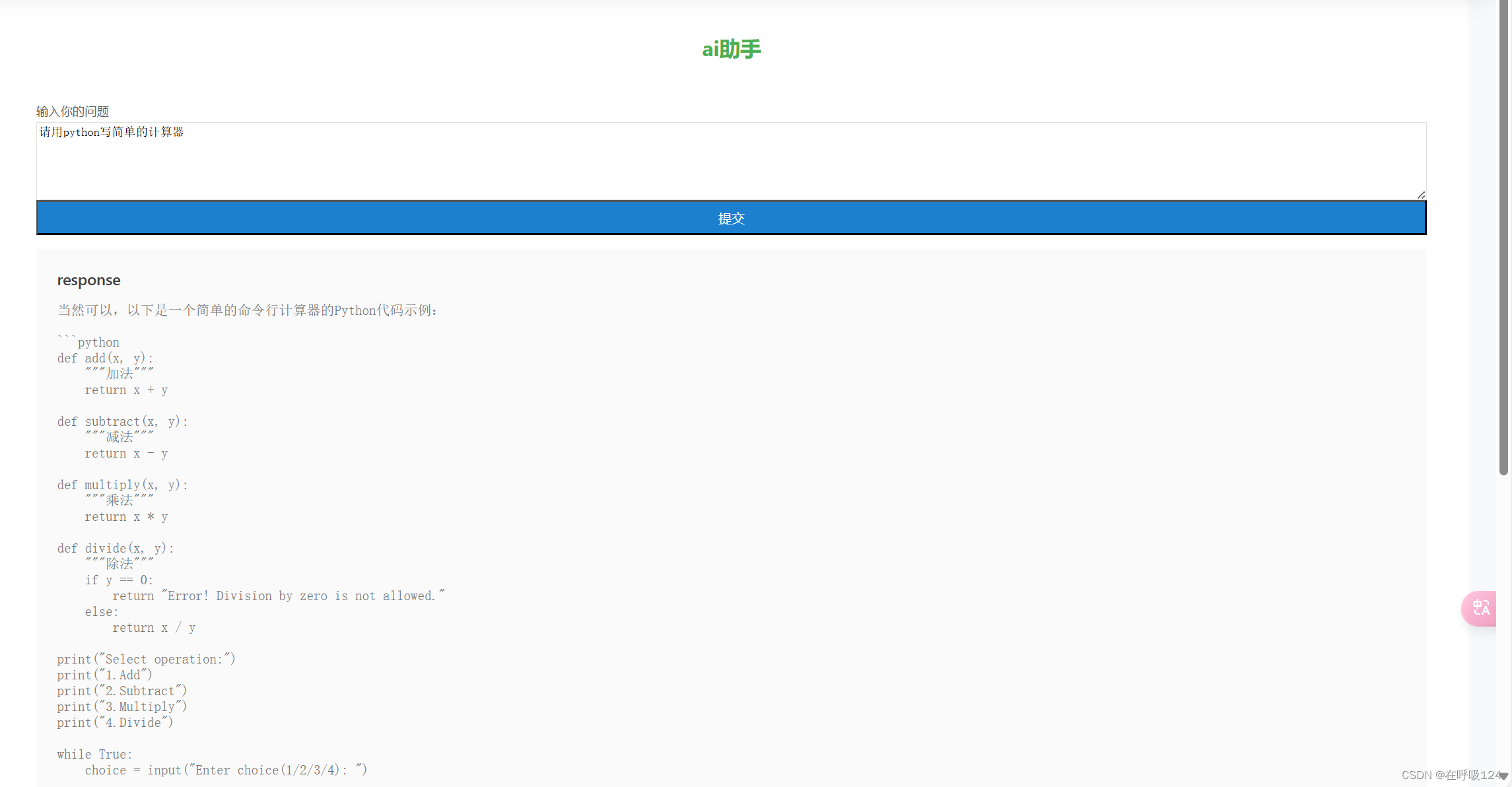
Coze+Discord:打造你的免费AI助手(教您如何免费使用GPT-4o/Gemini等最新最强的大模型/Discord如何正确连接Coze)
文章目录 📖 介绍 📖🏡 演示环境 🏡📒 文章内容 📒📝 准备Discord📝 准备Coze🔌 连接💡 测试效果⚓️ 相关链接 ⚓️📖 介绍 📖 你是否想免费使用GPT-4o/Gemini等最新最强的大模型,但又不想花费高昂的费用?本文将教你如何通过Coze搭建Bot,并将其转发…...

「OC」UI练习(二)——照片墙
「OC」UI练习——照片墙 文章目录 「OC」UI练习——照片墙UITapGestureRecognizer介绍照片墙实现 UITapGestureRecognizer介绍 UITapGestureRecognizer是UIKit框架中的一个手势识别器类,用于检测用户在视图上的轻击手势。它是UIGestureRecognizer的一个子类&#x…...

Stable Yogi Leather-Dress-Collection效果展示:2.5D视角下皮衣动态褶皱与身体贴合度真实感
Stable Yogi Leather-Dress-Collection效果展示:2.5D视角下皮衣动态褶皱与身体贴合度真实感 想象一下,你是一位动漫角色设计师,需要为角色设计一套充满质感的皮衣。传统的流程需要你手绘线稿、上色、刻画光影和褶皱,整个过程耗时…...

即时通讯私有化,BeeWorks让每一次内网沟通都安全、安心、高效
BeeWorks以全维度安全防护体系为支撑,将安全设计深度融入每一项核心功能,让员工在日常办公中既能享受高效协同,又能全程守护企业核心数据安全。同时,规范的使用操作是发挥安全优势的关键,本文将重点介绍BeeWorks核心功…...

如何在Linux系统中快速找到文件:FSearch终极文件搜索工具完整指南
如何在Linux系统中快速找到文件:FSearch终极文件搜索工具完整指南 【免费下载链接】fsearch A fast file search utility for Unix-like systems based on GTK3 项目地址: https://gitcode.com/gh_mirrors/fs/fsearch 在Linux系统中寻找特定文件常常令人头疼…...

别再只盯着芯片手册了!用CC6902SO搭建电流检测电路,这些实测数据和避坑经验更重要
别再只盯着芯片手册了!用CC6902SO搭建电流检测电路,这些实测数据和避坑经验更重要 第一次用CC6902SO搭建电流检测电路时,我完全按照芯片手册推荐的电路设计,结果发现实际输出和理论值差了将近15%。这让我意识到,真正影…...

音乐版权检测新方案:CCMusic模型与MySQL数据库集成
音乐版权检测新方案:CCMusic模型与MySQL数据库集成 用AI技术解决音乐版权保护难题,让每一首作品都能得到应有的尊重 1. 引言:音乐版权保护的现实挑战 音乐创作者们经常面临这样的困境:自己的作品在各大平台被无授权使用ÿ…...

React Native Keyboard Controller部署指南:生产环境最佳配置
React Native Keyboard Controller部署指南:生产环境最佳配置 【免费下载链接】react-native-keyboard-controller Keyboard manager which works in identical way on both iOS and Android 项目地址: https://gitcode.com/gh_mirrors/re/react-native-keyboard-…...

GreenLuma 2025管理器:Steam游戏库高效管理与解锁解决方案
GreenLuma 2025管理器:Steam游戏库高效管理与解锁解决方案 【免费下载链接】GreenLuma-2025-Manager An app made in python to manage GreenLuma 2025 AppList 项目地址: https://gitcode.com/gh_mirrors/gr/GreenLuma-2025-Manager 在数字娱乐日益丰富的今…...

换掉 Notepad++,事实证明它更牛逼!
提到文本编辑工具,大家肯定第一时间想到的是 Notepad 。Notepad 是一种流行的源代码编辑器,也是 Windows 用户的可靠记事本替代品。它是一个功能强大的实用程序,可在不占用大量存储空间的情况下提供最佳性能。不幸的是,它不适用于…...

技术无罪,人心可畏 —— 写在 315 “GEO 投毒” 话题之后
2026 年央视 315 晚会,将镜头对准了人工智能领域的灰色地带 ——“AI 投毒” 与 “GEO” 一夜之间成为公众热议的话题。记者虚构了一款名为 “Apollo-9” 的智能手环,借助 “GEO 优化系统” 批量生成虚假内容,短短数小时就让多个主流 AI 大模…...
)
索尼A6000/A7相机APP免费安装保姆级教程(含最新pmca工具下载)
索尼A6000/A7相机APP免费安装全流程指南(2024最新版) 作为一名长期使用索尼微单的摄影师,我深刻理解官方应用商店里那些本应内置的功能被拆分成付费APP的无奈。延时摄影、多重曝光这些基础功能,在二代机型上居然要额外付费解锁&am…...