【代码】3d->video
mesh->video
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.animation import FuncAnimation
import matplotlib.animation as animation
from pywavefront import Wavefront
import osname='dog'
# 读取OBJ文件并将其转换为numpy数组
obj_folder =f'path/{name}/'
obj_files = os.listdir(obj_folder)# 使用列表推导式筛选出以 'e300.obj' 结尾的文件
e300_obj_files = [file for file in obj_files if file.endswith('e300.obj')]# 定义一个函数用来从文件名中提取frame后的数字
def extract_frame_number(filename):# 从文件名中找到"frame_"和第一个"_"之后的位置start = filename.find('frame_') + 6end = filename.find('_', start)# 提取并返回数字部分return int(filename[start:end])# 使用自定义函数对文件列表进行排序
sorted_e300_obj_files = sorted(e300_obj_files, key=extract_frame_number)meshes = []
for obj_file in sorted_e300_obj_files:obj = Wavefront(obj_folder + obj_file, collect_faces=True)vertices = np.array(obj.vertices)faces = np.array(obj.mesh_list[0].faces)meshes.append((vertices, faces))fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')# 初始化绘图函数
def init():ax.clear()ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')# 动画更新函数
def update(frame):ax.clear()vertices, faces = meshes[frame]x, y, z = vertices[:, 0], vertices[:, 1], vertices[:, 2]ax.plot_trisurf(x, y, z, triangles=faces, shade=True, color='gray')ax.set_title(f'{name} Frame {frame}')ax.set_xlim(x.min(), x.max())ax.set_ylim(y.min(), y.max())ax.set_zlim(z.min(), z.max())# ax.view_init(elev=20, azim=45) # 设置视角# 创建动画
ani = FuncAnimation(fig, update, frames=len(meshes), init_func=init, blit=False)# 使用FFmpeg写入视频文件
writervideo = animation.FFMpegWriter(fps=10)
ani.save(f'n_{name}.mp4', writer=writervideo)
joints->video
import os
from os.path import join as pjoin
from tqdm import tqdm
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.animation import FuncAnimation, PillowWriter
from mpl_toolkits.mplot3d.art3d import Poly3DCollection
import mpl_toolkits.mplot3d.axes3d as p3
def plot_3d_motion(save_path, kinematic_tree, joints, title, figsize=(10, 10), fps=120, radius=4):title_sp = title.split(' ')if len(title_sp) > 10:title = '\n'.join([' '.join(title_sp[:10]), ' '.join(title_sp[10:])])def init():ax.set_xlim3d([-radius / 2, radius / 2])ax.set_ylim3d([0, radius])ax.set_zlim3d([0, radius])fig.suptitle(title, fontsize=20)ax.grid(False)def plot_xzPlane(minx, maxx, miny, minz, maxz):verts = [[minx, miny, minz],[minx, miny, maxz],[maxx, miny, maxz],[maxx, miny, minz]]xz_plane = Poly3DCollection([verts])xz_plane.set_facecolor((0.5, 0.5, 0.5, 0.5))ax.add_collection3d(xz_plane)data = joints.copy().reshape(len(joints), -1, 3)fig = plt.figure(figsize=figsize)ax = fig.add_subplot(111, projection='3d')init()MINS = data.min(axis=0).min(axis=0)MAXS = data.max(axis=0).max(axis=0)colors = ['red', 'blue', 'black', 'red', 'blue', 'darkblue', 'darkblue', 'darkblue', 'darkblue', 'darkblue','darkred', 'darkred', 'darkred', 'darkred', 'darkred']frame_number = data.shape[0]height_offset = MINS[1]data[:, :, 1] -= height_offsettrajec = data[:, 0, [0, 2]]data[..., 0] -= data[:, 0:1, 0]data[..., 2] -= data[:, 0:1, 2]def update(index):ax.cla() # 清除当前轴init() # 重新初始化轴ax.view_init(elev=120, azim=-90)ax.dist = 7.5plot_xzPlane(MINS[0]-trajec[index, 0], MAXS[0]-trajec[index, 0], 0, MINS[2]-trajec[index, 1], MAXS[2]-trajec[index, 1])if index > 1:ax.plot3D(trajec[:index, 0]-trajec[index, 0], np.zeros_like(trajec[:index, 0]), trajec[:index, 1]-trajec[index, 1], linewidth=1.0, color='blue')for i, (chain, color) in enumerate(zip(kinematic_tree, colors)):linewidth = 4.0 if i < 5 else 2.0ax.plot3D(data[index, chain, 0], data[index, chain, 1], data[index, chain, 2], linewidth=linewidth, color=color)plt.axis('off')ax.set_xticklabels([])ax.set_yticklabels([])ax.set_zticklabels([])ani = FuncAnimation(fig, update, frames=frame_number, interval=1000/fps, repeat=False)ani.save(save_path, fps=fps)plt.close()相关文章:

【代码】3d->video
mesh->video import numpy as np import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D from matplotlib.animation import FuncAnimation import matplotlib.animation as animation from pywavefront import Wavefront import osnamedog # 读取OBJ文…...
算法01 递推算法及相关问题详解【C++实现】
目录 递推的概念 训练:斐波那契数列 解析 参考代码 训练:上台阶 参考代码 训练:信封 解析 参考代码 递推的概念 递推是一种处理问题的重要方法。 递推通过对问题的分析,找到问题相邻项之间的关系(递推式&a…...

自动化测试火狐下载文件
本篇文章介绍selenium中火狐浏览器如何下载文件。比如我想把这个MP4的视频文件下载下来。 点击之后查看下载的类型是video/mp4 指定使用火狐浏览器 profile webdriver.FirefoxOptions() # 设置firefox默认的下载路径,0表示桌面,1表示我的下载…...

基于JSP技术的定西扶贫惠农推介系统
开头语:你好呀,我是计算机学长猫哥!如果有相关需求,文末可以找到我的联系方式。 开发语言:JSP 数据库:MySQL 技术:B/S架构、JSP技术 工具:Eclipse、MySQL、Tomcat 系统展示 首…...

Linux 终端窗口设置为透明
Linux 终端窗口设置为透明 打开终端 右键鼠标 选择Profile Preferences 点击Background 选择 Transparent background 拖动滑条调整透明度 完成。...

MySQL 中 Varchar(50) 和 varchar(500) 区别是什么?
一. 问题描述 我们在设计表结构的时候,设计规范里面有一条如下规则: 对于可变长度的字段,在满足条件的前提下,尽可能使用较短的变长字段长度。 为什么这么规定?我在网上查了一下,主要基于两个方面 基于存储空间的考…...

强化RAG:微调Embedding还是LLM?
为什么我们需要微调? 微调有利于提高模型的效率和有效性。它可以减少训练时间和成本,因为它不需要从头开始。此外,微调可以通过利用预训练模型的功能和知识来提高性能和准确性。它还提供对原本无法访问的任务和领域的访问,因为它…...

提取 Excel单元格文本下的超链接
在Excel中,可以使用内置的函数来提取单元格中的超链接地址。如果你有一个包含超链接的单元格,例如B1,你可以使用以下步骤来提取这个超链接: 在一个新的单元格(例如C1)中,输入以下公式ÿ…...

一键安全体检!亚信安全携手鼎捷软件推出企业安全体检活动 正式上线
亚信安全联合鼎捷软件股份有限公司(以下简称“鼎捷软件”)正式推出“一键安全体检”服务。亚信安全网络安全专家将携手鼎捷软件数据安全专家,围绕企业的数智安全状况,进行问题探索与治愈、新问题预测与预警,在全面筛查…...
)
numpy - array(1)
一维数据:向量 二位数据:矩阵 维度超过三维的数据:张量 这些数据在numpy中统称array (1)使用穷举法创建多为数据,接受列表或者元组类型的数据 a numpy.array([1, 2, 3]) b numpy.array([[1, 2, 3], (4, 5, 6), [7, 8, 9]]) (2)创建所有元…...

师彼长技以助己(6)递归思维
师彼长技以助己(6)递归思维 递归思维-小游戏 思维小游戏 思维 小游戏:1 玩一个从1或2开始往上加的游戏,谁加到20就赢 如何保证一定赢呢?我们倒推,要先到20的话,谁先到17就赢,如此…...

Kali Linux 2024.2
Kali Linux 2024.2 版本(t64、GNOME 46 和社区包) 比平常晚了一点,但 Kali 2024.2 来了!延迟是由于实现这一目标的幕后变化所致,这也是人们关注的焦点。社区提供了大量帮助,这次他们不仅添加了新的软件包&…...
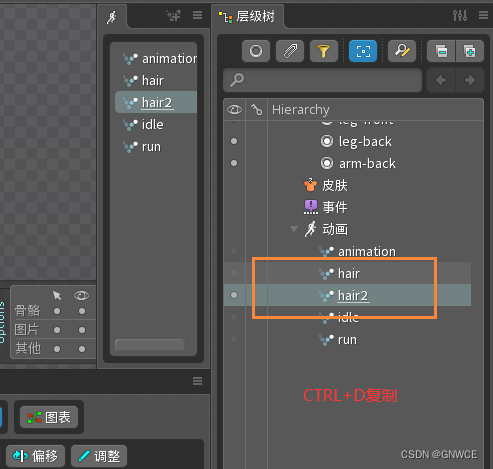
【Spine学习08】之短飘,人物头发动效制作思路
上一节说完了跑步的, 这节说头发发型。 基础过程总结: 1.创建骨骼(头发需要在上方加一个总骨骼) 2.创建网格(并绑定黄线) 3.绑定权重(发根位置的顶点赋予更多总骨骼的权重) 4.切换到…...

chatgpt的命令词
人不走空 🌈个人主页:人不走空 💖系列专栏:算法专题 ⏰诗词歌赋:斯是陋室,惟吾德馨 目录 🌈个人主页:人不走空 💖系列专栏:算法专题 ⏰诗词歌…...

用python把docx批量转为pdf
为保证转换质量,本文的方法是通过脚本和com技术调用office自带的程序进行转换的,因此需要电脑已经装有office。如果希望不装office也能用,则需要研究OpenXML技术,后面实在闲的慌(退休)再搞。 安装所需库 …...

项目采购管理
目录 1.概述 2.三个子过程 2.1.规划采购管理 2.2.实施采购 2.3.控制采购 2.4.归属过程组 3.应用场景 3.1.十个应用场景 3.2.软件开发项目 3.2.1. 需求识别和分析 3.2.2. 制定采购计划 3.2.3. 发布采购请求 3.2.4. 供应商评估与选择 3.2.5. 合同签订 3.2.6. 采购…...

Elasticsearch 认证模拟题 - 18
一、题目 为一个索引,按要求设置以下 dynamic Mapping 一切 text 类型的字段,类型全部映射成 keyword一切以 int_ 开头命名的字段,类型都设置成 integer 1.1 考点 字段的动态映射 1.2 答案 # 创建索引和索引模板 PUT my_index {"m…...

Python基础-速记笔记
Python的基础数据类型都有哪些? 1、字符串(string)2、布尔类型(bool)3、整数(int) 4、浮点数(float)5、列表(list)6、集合(set)7、元组(tuple)8、字典(dict) 其中不可变类型有: 字符串(string)、布尔类型(bool)、整数(int) 、浮点数(float)、元组(tup…...

青少年编程与数学 01-001开始使用计算机 02课题、计算机操作系统3_3
青少年编程与数学 01-001开始使用计算机 02课题、计算机操作系统3_3 四、Linux操作系统安装(一) 准备工作(二)设置BIOS/UEFI(三) 安装Linux(四)磁盘分区(五)安…...

填表统计预约打卡表单系统(FastAdmin+ThinkPHP+UniApp)
填表统计预约打卡表单系统:一键搞定你的预约与打卡需求 填表统计预约打卡表单系统是一款基于FastAdminThinkPHPUniApp开发的一款集信息填表、预约报名,签到打卡、活动通知、报名投票、班级统计等功能的自定义表单统计小程序。 📝 一、引言…...

70行代码实现MCU性能热点分析:基于Cortex-M中断采样的轻量级Profiler
1. 项目概述:用70行代码为你的MCU“把脉”在嵌入式开发里,性能优化是个永恒的话题。我们总想知道,在程序跑起来之后,究竟是哪个函数、哪段代码在偷偷吃掉宝贵的CPU时间?是那个复杂的算法,还是那个不起眼的循…...

FCOS训练自己的数据?从Labelme标注到VOC格式转换,这份避坑指南请收好
FCOS训练自定义数据集:从Labelme标注到VOC格式的完整避坑指南 当你已经用Labelme完成了图像标注,却卡在数据格式转换这一步时,这篇文章将成为你的救星。FCOS作为一款优秀的全卷积目标检测模型,对输入数据格式有着严格的要求&#…...

Squirrel-RIFE实战指南:7步掌握AI视频补帧核心技术
Squirrel-RIFE实战指南:7步掌握AI视频补帧核心技术 【免费下载链接】Squirrel-RIFE 效果更好的补帧软件,显存占用更小,是DAIN速度的10-25倍,包含抽帧处理,去除动漫卡顿感 项目地址: https://gitcode.com/gh_mirrors/…...

别再只当CANoe/CANape的‘眼睛’了!VN1640A的I/O通道实战:手把手教你采集电压和开关信号
VN1640A硬件接口深度开发:从电压采集到PWM控制的工程实践 在汽车电子测试领域,Vector的VN系列接口设备早已成为行业标准配置。大多数工程师对CAN/LIN通道的应用驾轻就熟,却常常忽略设备上那个不起眼的9针I/O接口——这个被低估的硬件通道实际…...

【omc】Claude Code 必备神器:Oh-My-ClaudeCode 让你的 AI 编程效率翻倍
用过 Claude Code 的人都知道,它很强。 但强归强,用起来有不少痛点:Token 烧得快、任务动不动崩溃、复杂项目搞不定。 Oh-My-ClaudeCode(OMC)就是来治这些病的。一、为什么需要 OMC? 原生 Claude Code 的三…...

企业私有化AI训练推理一体工作站/自动化AI算法训练服务器DLTM让企业AI自主可控
在企业智能化转型的浪潮中,AI模型开发始终是横亘在多数企业面前的一道“技术鸿沟”。一边是熟悉行业场景、深谙业务痛点的业务团队,却因不懂代码、不熟悉算法,难以将实际需求转化为可用的AI能力;一边是掌握专业开发技能的技术团队…...

Eviews面板数据建模保姆级教程:从Hausman检验到模型选择,一次讲透固定效应与随机效应
Eviews面板数据建模实战指南:从数据导入到模型选择的完整流程 面板数据分析作为计量经济学中的重要工具,能够同时捕捉时间和个体维度的信息。对于刚接触Eviews的研究者来说,如何正确建立面板模型往往令人困惑——从数据准备到模型选择&#x…...

如何用BilibiliDown实现跨平台B站视频高效下载?3个核心优势解析
如何用BilibiliDown实现跨平台B站视频高效下载?3个核心优势解析 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_…...

TinyGPT-V 和 MiniGPT-4 在架构设计上的主要区别
MiniGPT-4 是“大 LLM 冻结视觉编码器 单层线性投影”的经典桥接式 MLLM;TinyGPT-V 是“小 LLM 视觉模块 更复杂 mapping / norm / LoRA 训练策略”的轻量化 sVLM。1. 总体架构对比对比项MiniGPT-4TinyGPT-V设计目标验证强 LLM 接入视觉后可涌现 GPT-4V 类多模态…...

Python开发者三步完成Taotoken OpenAI兼容接口的接入与调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python开发者三步完成Taotoken OpenAI兼容接口的接入与调用 对于习惯使用OpenAI官方Python SDK的开发者来说,接入Taoto…...