航拍无人机像素坐标转世界坐标
一、背景
已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正
二、代码
import numpy as np
import cv2
# 畸变校正
def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist):
k0,k1,k2,k3=sym_dist
# k1, k2, p1, p2, k3 = sym_dist
p1,p2,p3=dec_dist
fx = focal_length_mm
fy = focal_length_mm
cx = xpoff_px
cy = ypoff_px
distCoeffs = np.array([k1, k2, p1, p2,k3])
cameraMatrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]])
distorted_points = np.array([[pixel_x, pixel_y]], dtype=np.float32)
undistorted_points = cv2.undistortPoints(distorted_points, cameraMatrix, distCoeffs)
#################################################### 4\对图像去畸变
img = cv2.imread('./images/100_0004_0001.JPG')
img_undistored = cv2.undistort(img, cameraMatrix, distCoeffs)
cv2.imwrite('./images/100_0004_00011.JPG', img_undistored)
return undistorted_points[0][0][0], undistorted_points[0][0][1]
# 相机坐标转世界坐标
def camera_to_world_coordinates(cam_coords, pos):
# 获取相机到世界的转换参数
pos_x, pos_y, pos_z, roll, pitch, yaw = pos
# 将角度转换为弧度
roll = np.radians(roll)
pitch = np.radians(pitch)
yaw = np.radians(yaw)
# 计算旋转矩阵
R_roll = np.array([
[1, 0, 0],
[0, np.cos(roll), -np.sin(roll)],
[0, np.sin(roll), np.cos(roll)]
])
R_pitch = np.array([
[np.cos(pitch), 0, np.sin(pitch)],
[0, 1, 0],
[-np.sin(pitch), 0, np.cos(pitch)]
])
R_yaw = np.array([
[np.cos(yaw), -np.sin(yaw), 0],
[np.sin(yaw), np.cos(yaw), 0],
[0, 0, 1]
])
R = R_yaw @ R_pitch @ R_roll
# 相机坐标转换到世界坐标
cam_coords_homogeneous = np.array([cam_coords[0], cam_coords[1], -H, 1])
world_coords = R @ cam_coords_homogeneous[:3] + np.array([pos_x, pos_y, pos_z])
return world_coords
if __name__ == "__main__":
取消
首页
编程
手机
软件
硬件
安卓
苹果
手游
教程
平面
服务器
首页 > 脚本专栏 > python > python无人机航拍图片像素坐标
python实现无人机航拍图片像素坐标转世界坐标的示例代码
2024-06-12 10:42:38 作者:GIS从业者
已知相机参数在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,本文给大家分享实现脚本,感兴趣的朋友跟随小编一起看看吧
背景
已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正
脚本
import numpy as np
import cv2
# 畸变校正
def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist):
k0,k1,k2,k3=sym_dist
# k1, k2, p1, p2, k3 = sym_dist
p1,p2,p3=dec_dist
fx = focal_length_mm
fy = focal_length_mm
cx = xpoff_px
cy = ypoff_px
distCoeffs = np.array([k1, k2, p1, p2,k3])
cameraMatrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]])
distorted_points = np.array([[pixel_x, pixel_y]], dtype=np.float32)
undistorted_points = cv2.undistortPoints(distorted_points, cameraMatrix, distCoeffs)
#################################################### 4\对图像去畸变
img = cv2.imread('./images/100_0004_0001.JPG')
img_undistored = cv2.undistort(img, cameraMatrix, distCoeffs)
cv2.imwrite('./images/100_0004_00011.JPG', img_undistored)
return undistorted_points[0][0][0], undistorted_points[0][0][1]
# 相机坐标转世界坐标
def camera_to_world_coordinates(cam_coords, pos):
# 获取相机到世界的转换参数
pos_x, pos_y, pos_z, roll, pitch, yaw = pos
# 将角度转换为弧度
roll = np.radians(roll)
pitch = np.radians(pitch)
yaw = np.radians(yaw)
# 计算旋转矩阵
R_roll = np.array([
[1, 0, 0],
[0, np.cos(roll), -np.sin(roll)],
[0, np.sin(roll), np.cos(roll)]
])
R_pitch = np.array([
[np.cos(pitch), 0, np.sin(pitch)],
[0, 1, 0],
[-np.sin(pitch), 0, np.cos(pitch)]
])
R_yaw = np.array([
[np.cos(yaw), -np.sin(yaw), 0],
[np.sin(yaw), np.cos(yaw), 0],
[0, 0, 1]
])
R = R_yaw @ R_pitch @ R_roll
# 相机坐标转换到世界坐标
cam_coords_homogeneous = np.array([cam_coords[0], cam_coords[1], -H, 1])
world_coords = R @ cam_coords_homogeneous[:3] + np.array([pos_x, pos_y, pos_z])
return world_coords
if __name__ == "__main__":
####################################################基本参数
# 传感器宽度和高度(毫米)
sensor_width_mm = 12.83331744000000007588
sensor_height_mm = 8.55554496000000064271
# 图像宽度和高度(像素)
image_width_px = 5472
image_height_px = 3648
# 焦距(毫米)
focal_length_mm = 8.69244671863242679422
# 焦距(米)
focal_length_m = 8.69244671863242679422/1000
# 相对航高(米)
H=86.93
#像主点坐标 (像素)
xpoff_px=20.88973563438230485190
ypoff_px=50.51977022866981315019
#################################################### 1\计算空间分辨率
# 传感器尺寸转换为米
sensor_width_m = sensor_width_mm / 1000
sensor_height_m = sensor_height_mm / 1000
# 计算水平和垂直的 GSD
GSD_x = (sensor_width_m/image_width_px) * (H / focal_length_m )
GSD_y = (sensor_height_m /image_height_px) * (H / focal_length_m)
# 水平和垂直方向的 GSD
print("水平方向的 GSD:", GSD_x, "米/像素")
print("垂直方向的 GSD:", GSD_y, "米/像素")
#################################################### 2\给定像素坐标,计算相机坐标
# 像素坐标
oripixel_x = image_width_px
oripixel_y = image_height_px
# oripixel_x = image_width_px/2
# oripixel_y = image_height_px/2
# oripixel_x = 0
# oripixel_y = 0
pixel_x=oripixel_x-xpoff_px-image_width_px/2
pixel_y=oripixel_y-ypoff_px-image_height_px/2
# 计算相机坐标(假设无畸变)
camera_x = pixel_x * GSD_x
camera_y = pixel_y * GSD_y
print("像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的相机坐标 (x, y): (", camera_x, "米, ", camera_y, "米)")
#################################################### 3\计算畸变后坐标
# 对称畸变系数
sym_dist = [0, -0.00043396118129128110, 0.00000262222711982075, -0.00000001047488706013]
# 径向畸变
dec_dist = [0.00000205885592671873, -0.00000321714140091248, 0]
# 进行畸变校正
undistorted_camera_x, undistorted_camera_y = undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist)
print("畸变校正后像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的相机坐标 (x, y): (", undistorted_camera_x, "米, ", undistorted_camera_y, "米)")
#################################################### 4\计算世界坐标
# POS数据
pos = [433452.054688, 2881728.519704, 183.789696, 0.648220, -0.226028, 14.490357]
# 计算世界坐标
world_coords = camera_to_world_coordinates((undistorted_camera_x, undistorted_camera_y), pos)
print("旋转平移变换后像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的世界坐标 (x, y): (", world_coords[0], "米, ", world_coords[1], "米)")
到此这篇关于python实现无人机航拍图片像素坐标转世界坐标的示例代码的文章就介绍到这了。
相关文章:

航拍无人机像素坐标转世界坐标
一、背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 二、代码…...

Linux系统学习——指令二
Linux系统学习——指令二 sed 指令perl 指令rpm 指令rz 和 sz 指令查看文件大小及压缩文件指令使用tar命令:使用zip命令:注意事项: 解压文件指令 sed 指令 使用sed命令:sed -i s/旧内容/新内容/g 文件名,这将会在文件…...

【逻辑回归】和【线性回归】的区别和联系-九五小庞
逻辑回归(Logistic Regression)和线性回归(Linear Regression)是两种常用的统计学习和机器学习技术,它们各自具有特定的应用场景和优势。以下是它们之间的主要区别和联系: 定义与目的 线性回归:…...

富格林:正视欺诈阻挠交易被骗
富格林指出,在交易的过程中,投资者们就算做了十分的把握,也难免会出现亏损。因此建议新手投资者,在准备投资时一定要做好充分的准备工作,明辨欺诈陷阱,同时学习正规的做单盈利技巧,这才能帮助我…...

如何在WPS中加载EndNote X9插件
如何在WPS中加载EndNote X9插件 步骤1:关闭WPS 确保所有WPS文档和窗口都已关闭。 步骤2:修改文件后缀 打开文件资源管理器,导航到路径:C:\Program Files (x86)\EndNote X9\Product-Support\CWYW。找到文件 Cwyw_X86.dat&#…...
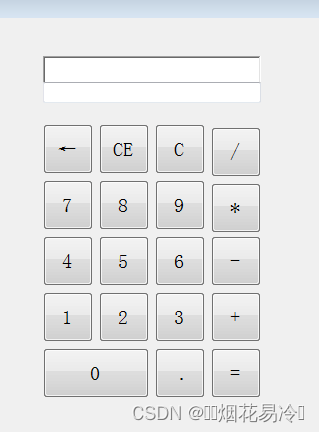
vb.net小demo(计算器、文件处理等/C#也可看)
Demo1:使用窗体控件实现一个简易版计算器 Public Class Form1Private Sub Button_1_Click(sender As Object, e As EventArgs) Handles Button_1.ClickCalSubBox.Text Button_1.TextEnd SubPrivate Sub Button_2_Click(sender As Object, e As EventArgs) Handles …...

【vue3|第8期】深入理解Vue 3 computed计算属性
日期:2024年6月10日 作者:Commas 签名:(ง •_•)ง 积跬步以致千里,积小流以成江海…… 注释:如果您觉得有所帮助,帮忙点个赞,也可以关注我,我们一起成长;如果有不对的地方…...
《精通ChatGPT:从入门到大师的Prompt指南》附录C:专业术语表
附录C:专业术语表 本附录旨在为读者提供一本全面的术语表,帮助理解《精通ChatGPT:从入门到大师的Prompt指南》中涉及的各种专业术语。无论是初学者还是高级用户,这些术语的定义和解释将为您在使用ChatGPT时提供重要参考。 A AI&…...
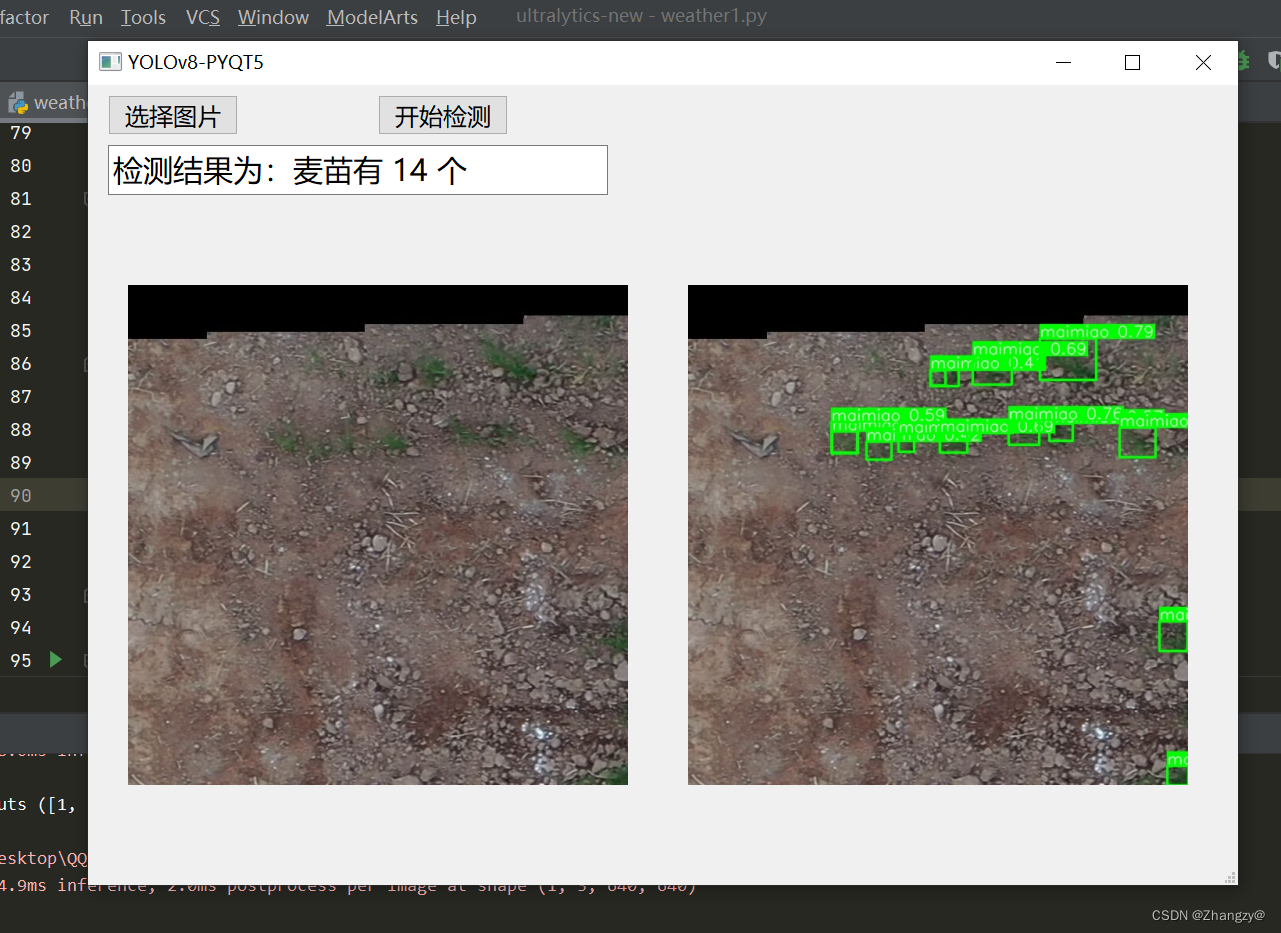
YOLOv8可视化界面PYQT5
yolov8,可视化界面pyqt。支持图片检测,视频检测,摄像头检测等,实时显示检测画面。支持自定义数据集,计数,fps展示……,即插即用,无需更改太多代码...
远程代码执行和远程命令执行是一个东西吗
远程代码执行(Remote Code Execution,简称RCE)和远程命令执行在概念上有所区别,但两者都涉及到攻击者通过远程方式在目标系统上执行代码或命令。以下是两者的详细比较: 定义: 远程代码执行(RCE…...

C++ 20新特性之线程与jthread
💡 如果想阅读最新的文章,或者有技术问题需要交流和沟通,可搜索并关注微信公众号“希望睿智”。 为什么要引入jthread 在C 11中,已经引入了std::thread。std::thread为C标准库带来了一流的线程支持,极大地促进了多线程…...
)
赶紧收藏!2024 年最常见 20道并发编程面试题(七)
上一篇地址:赶紧收藏!2024 年最常见 20道并发编程面试题(六)-CSDN博客 十三、什么是线程局部存储(Thread-Local Storage)? 线程局部存储(Thread-Local Storage,简称TLS…...
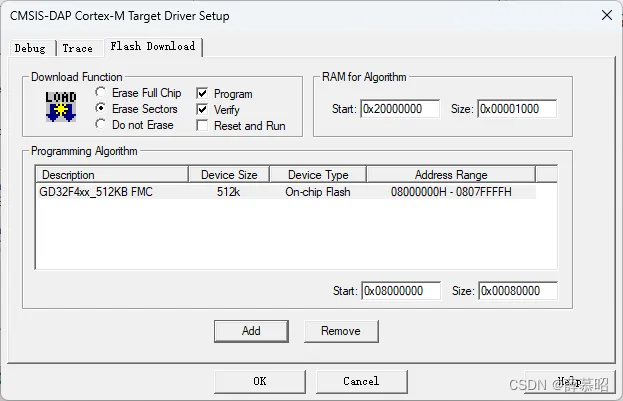
HAL库开发--第一盏灯
知不足而奋进 望远山而前行 目录 文章目录 前言 学习目标 学习内容 需求 开发流程 项目创建 芯片配置 功能配置 时钟配置 项目配置 编写代码 编译测试 烧录失败解决 编辑 总结 前言 在嵌入式系统开发中,掌握HAL库开发流程、STMCubeMX配置过程以及…...
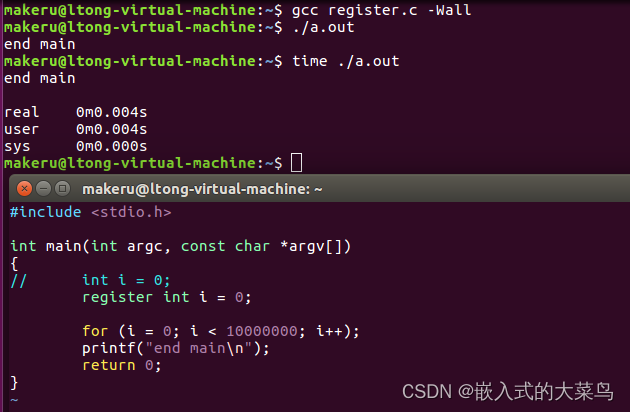
Linux C语言:变量的作用域和生命周期(auto、register、static和extern)
一、变量存储类型-auto 1、auto变量的说明 变量在程序中使用时,必须预先说明它们的存储类型和数据类型。 变量说明的一般形式是: <存储类型> <数据类型 > <变量名> ; <存储类型>是关键词auto、register、static和extern<…...

AI Stable diffusion 报错:稳定扩散模型加载失败,退出
可能是内存不够,看看你最近是加了新的大的模型,可以把你的stable-diffusion-webui\models\Stable-diffusion目录下的某个ckpt删除掉,可能ckpt太大,无法加载成功; Stable diffusion model failed to load, exiting 如图…...
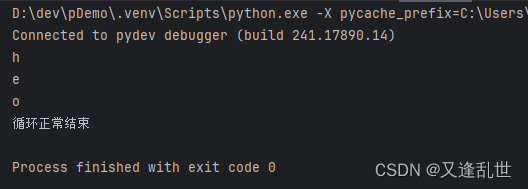
[Python学习篇] Python循环语句
while 循环 语法: while 条件: 条件成立后会重复执行的代码 ...... 示例1:死循环 # 这是一个死循环示例 while True:print("我正在重复执行")示例2:循环指定次数 i 1 while i < 5:print(f"执行次数 {i}")…...

MongoDB 正则表达式
MongoDB 正则表达式 MongoDB 是一个流行的 NoSQL 数据库,它提供了强大的查询功能,包括对正则表达式的支持。正则表达式是一种强大的文本搜索工具,它允许用户根据特定的模式匹配和搜索字符串。在 MongoDB 中,正则表达式可以用于查…...
Django配置连接池:使用django-db-connection-pool配置连接池
一、该三方库文档使用 github地址: https://github.com/altairbow/django-db-connection-pool/blob/1.2.5/README_CN.mdhttps://github.com/altairbow/django-db-connection-pool/blob/1.2.5/README_CN.md1、选择指定版本,查看指定版本的文档和配置&am…...
SpringBoot整合钉钉实现消息推送
前言 钉钉作为一款企业级通讯工具,具有广泛的应用场景,包括但不限于团队协作、任务提醒、工作汇报等。 通过Spring Boot应用程序整合钉钉实现消息推送,我们可以实现以下功能: 实时向指定用户或群组发送消息通知。自定义消息内容…...
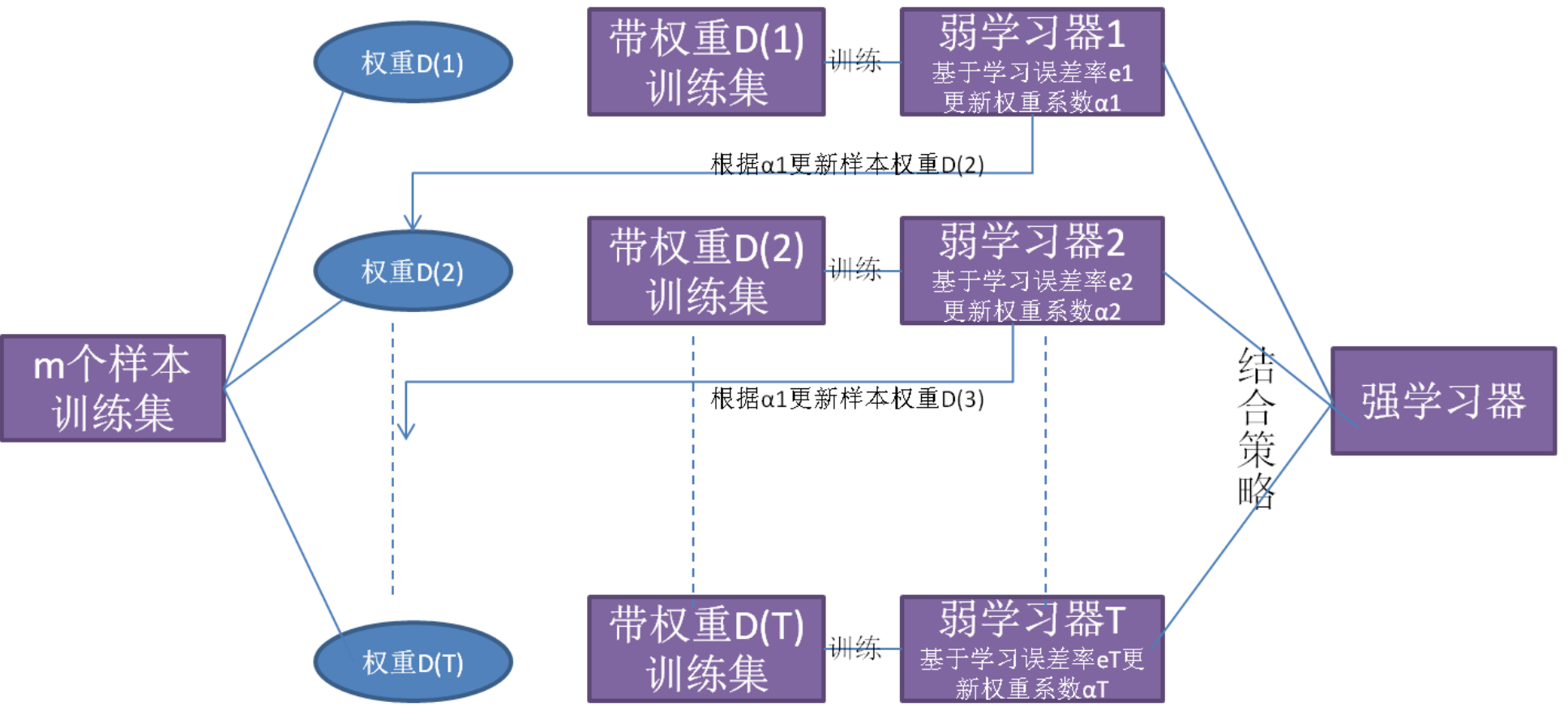
【机器学习】集成学习方法:Bagging与Boosting的应用与优势
🔥 个人主页:空白诗 文章目录 引言一、集成学习的定义二、Bagging方法1. 随机森林(Random Forest)2. 其他Bagging方法 二、Boosting方法1. 梯度提升树(Gradient Boosting Machine, GBM)解释GBM的基本原理和…...

Codex 小步迭代详解与操作指南
1. 文档目标 这份文档的目标,是帮助你从“一步到位思维”切换到“小步迭代思维”。 读完之后,你应该能够: 理解为什么 Codex 更适合小步迭代,而不是一次性大改掌握一套稳定的小步迭代操作流程知道每一步应该让 Codex 做多大范围的…...

d2s-editor:暗黑破坏神2存档修改终极实战宝典
d2s-editor:暗黑破坏神2存档修改终极实战宝典 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor 还在为暗黑破坏神2的刷装备、练级、属性点分配而烦恼吗?d2s-editor为你带来全新的单机游戏体验——这是一款基…...

从标注工具到AI流水线:在Windows上搭建CVAT,并连接Label Studio与Jupyter Notebook
从标注工具到AI流水线:在Windows上构建CVAT与生态工具的协同工作流 当计算机视觉项目从实验室走向生产环境时,数据标注往往成为制约迭代速度的关键瓶颈。传统孤立使用的标注工具如同信息孤岛,而现代MLOps实践需要的是能够无缝衔接数据标注、质…...

Wand-Enhancer:三步解锁WeMod Pro功能的终极免费方案
Wand-Enhancer:三步解锁WeMod Pro功能的终极免费方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的订阅费用而烦恼吗&…...

从赛博朋克到量子有机体,未来主义风格演进全图谱,深度解析MJ 5.2→6.2→NijiV6的渲染范式跃迁
更多请点击: https://intelliparadigm.com 第一章:赛博朋克到量子有机体:未来主义视觉范式的哲学跃迁 当霓虹雨巷中的义体少女凝视全息广告牌,她瞳孔倒映的已不仅是资本编码的欲望图景,而是意识与拓扑量子态耦合的初始…...

STM32CubeMX配置SPI驱动W25Q64 Flash:从硬件连接到驱动封装,一个完整项目实战
STM32CubeMX实战:构建高可靠SPI Flash存储系统从硬件到软件全解析 在嵌入式开发中,外部Flash存储解决方案往往成为扩展设备数据容量的关键选择。W25Q64作为一款经典的64M-bit SPI Flash芯片,凭借其稳定的性能和广泛的应用场景,成为…...
)
保姆级教程:在HCL模拟器上给H3C路由器配置DHCP服务器(双网段实战)
从零构建H3C路由器双网段DHCP服务:模拟器实战与协议解析 在虚拟实验室中搭建网络环境已成为现代工程师的必备技能,而DHCP服务作为网络自动化的基石,其配置过程往往成为初学者接触企业级设备的第一个实战挑战。本文将使用H3C官方推出的HCL模拟…...

如何用ta-lib-python构建实时金融数据分析系统:Kafka集成终极指南 [特殊字符]
如何用ta-lib-python构建实时金融数据分析系统:Kafka集成终极指南 🚀 【免费下载链接】ta-lib-python Python wrapper for TA-Lib (http://ta-lib.org/). 项目地址: https://gitcode.com/gh_mirrors/ta/ta-lib-python ta-lib-python是金融技术分析…...

【AI面试临阵磨枪-56】大模型服务部署:Docker、K8s、GPU 调度、推理加速
一、 面试题目在生产环境中部署大模型服务时,你是如何结合 Docker 和 K8s 实现高效治理的?特别是在 GPU 调度(如共享、切分) 和 推理加速(如 vLLM, TensorRT-LLM) 方面有哪些实战经验?二、 知识…...

开源知识库OpenAshare:用Git管理技术资产的工程化实践
1. 项目概述:一个面向开发者的开源分享平台最近在GitHub上看到一个挺有意思的项目,叫OpenAshare。光看名字,你可能以为它又是一个普通的代码仓库,但点进去之后,我发现它的定位其实更偏向于一个“开源分享平台”或者说“…...