算法训练营 day43 动态规划 不同路径 不同路径 II
算法训练营 day43 动态规划 不同路径 不同路径 II
不同路径
62. 不同路径 - 力扣(LeetCode)
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径
按照动规五部曲来分析:
- 确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 确定递推公式
想要求dp[i][j],只能有两个方向来推导出来,即dp[i - 1][j] 和 dp[i][j - 1]。
此时在回顾一下 dp[i - 1][j] 表示啥,是从(0, 0)的位置到(i - 1, j)有几条路径,dp[i][j - 1]同理。
那么很自然,dp[i][j] = dp[i - 1][j] + dp[i][j - 1],因为dp[i][j]只有这两个方向过来。
- dp数组的初始化
如何初始化呢,首先dp[i][0]一定都是1,因为从(0, 0)的位置到(i, 0)的路径只有一条,那么dp[0][j]也同理。
- 确定遍历顺序
这里要看一下递推公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1],dp[i][j]都是从其上方和左方推导而来,那么从左到右一层一层遍历就可以了。
这样就可以保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值的。
- 举例推导dp数组
class Solution {public int uniquePaths(int m, int n) {int[][] dp = new int[m][n];for (int i = 0; i < m; i++) dp[i][0] = 1;for (int j = 0; j < n; j++) dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}return dp[m - 1][n - 1];}
}
不同路径 II
63. 不同路径 II - 力扣(LeetCode)
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
62.不同路径 中我们已经详细分析了没有障碍的情况,有障碍的话,其实就是标记对应的dp table(dp数组)保持初始值(0)就可以了。
- 确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 确定递推公式
递推公式和62.不同路径一样,dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
但这里需要注意一点,因为有了障碍,(i, j)如果就是障碍的话应该就保持初始状态(初始状态为0)。
- dp数组如何初始化
因为从(0, 0)的位置到(i, 0)的路径只有一条,所以dp[i][0]一定为1,dp[0][j]也同理。
但如果(i, 0) 这条边有了障碍之后,障碍之后(包括障碍)都是走不到的位置了,所以障碍之后的dp[i][0]应该还是初始值0。
- 确定遍历顺序
从递归公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1] 中可以看出,一定是从左到右一层一层遍历,这样保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值。
- 举例推导dp数组
class Solution {public int uniquePathsWithObstacles(int[][] obstacleGrid) {int m = obstacleGrid.length;int n = obstacleGrid[0].length;int[][] dp = new int[m][n];for (int i = 0; i < m&&obstacleGrid[i][0]==0; i++) dp[i][0] = 1;for (int j = 0; j < n&&obstacleGrid[0][j]==0; j++) dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {if (obstacleGrid[i][j]==1) continue;dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}return dp[m - 1][n - 1];}
}
相关文章:

算法训练营 day43 动态规划 不同路径 不同路径 II
算法训练营 day43 动态规划 不同路径 不同路径 II 不同路径 62. 不同路径 - 力扣(LeetCode) 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达…...

关联查询的SQL有几种情况
1、内连接:inner join … on 结果:A表 ∩ B表 2、左连接:A left join B on (2)A表全部 (3)A表- A∩B 3、右连接:A right join B on (4)B表全部 &#…...

查缺补漏三:事务隔离级别
什么是事务? 事务就是一组操作的集合,事务将整组操作作为一个整体,共同提交或者共同撤销 这些操作只能同时成功或者同时失败,成功即可提交事务,失败就执行事务回滚 MySQL的事务默认是自动提交的,一条语句执…...

没有她的通讯录(C语言实现)
🚀write in front🚀 📝个人主页:认真写博客的夏目浅石. 🎁欢迎各位→点赞👍 收藏⭐️ 留言📝 📣系列专栏:夏目的C语言宝藏 💬总结:希望你看完之…...

Spring Security 从入门到精通
前言 Spring Security 是 Spring 家族中的一个安全管理框架。相比与另外一个安全框架Shiro,它提供了更丰富的功能,社区资源也比Shiro丰富。 一般来说中大型的项目都是使用SpringSecurity 来做安全框架。小项目有Shiro的比较多,因为相比与Spr…...
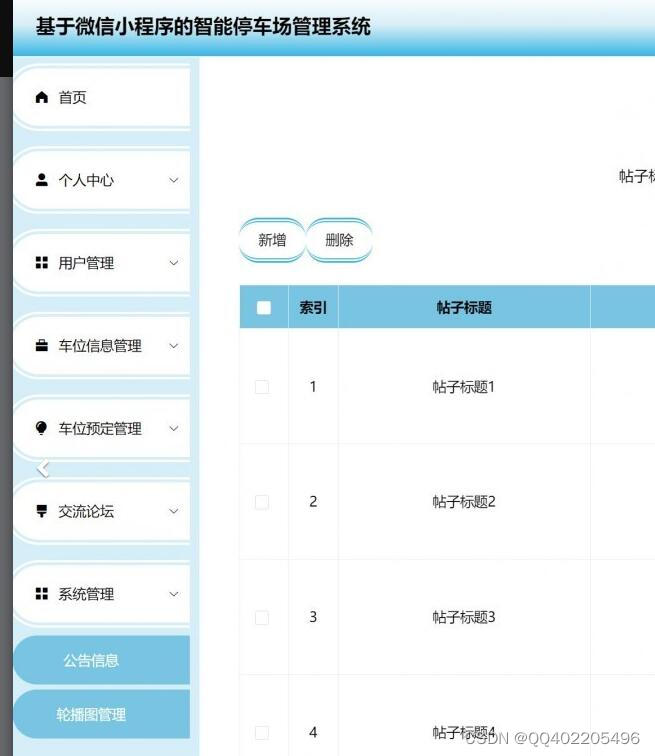
微信小程序Springboot vue停车场车位管理系统
系统分为用户和管理员两个角色 用户的主要功能有: 1.用户注册和登陆系统 2.用户查看系统的公告信息 3.用户查看车位信息,在线预约车位 4.用户交流论坛,发布交流信息,在线评论 5.用户查看地图信息,在线导航 6.用户查看个…...
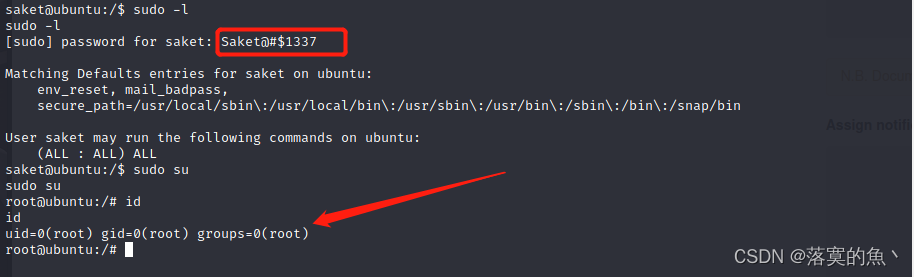
看完这篇 教你玩转渗透测试靶机vulnhub——Hack Me Please: 1
Vulnhub靶机Hack Me Please: 1渗透测试详解Vulnhub靶机介绍:Vulnhub靶机下载:Vulnhub靶机安装:Vulnhub靶机漏洞详解:①:信息收集:②:漏洞利用③:获取反弹shell:④&#x…...
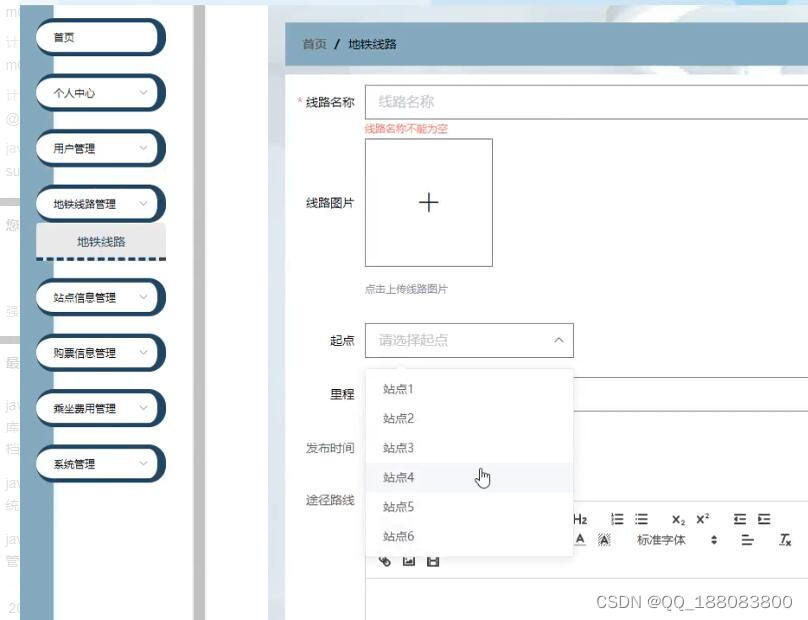
nodejs+vue地铁站自动售票系统-火车票售票系统vscode
地铁站自动售票系统主要包括个人中心、地铁线路管理、站点管理、购票信息管理、乘坐管理、用户信息管理等多个模块。它使用的是前端技术:nodejsvueelementui 前后端通讯一般都是采取标准的JSON格式来交互。前端技术:nodejsvueelementui,视图层其实质就是…...
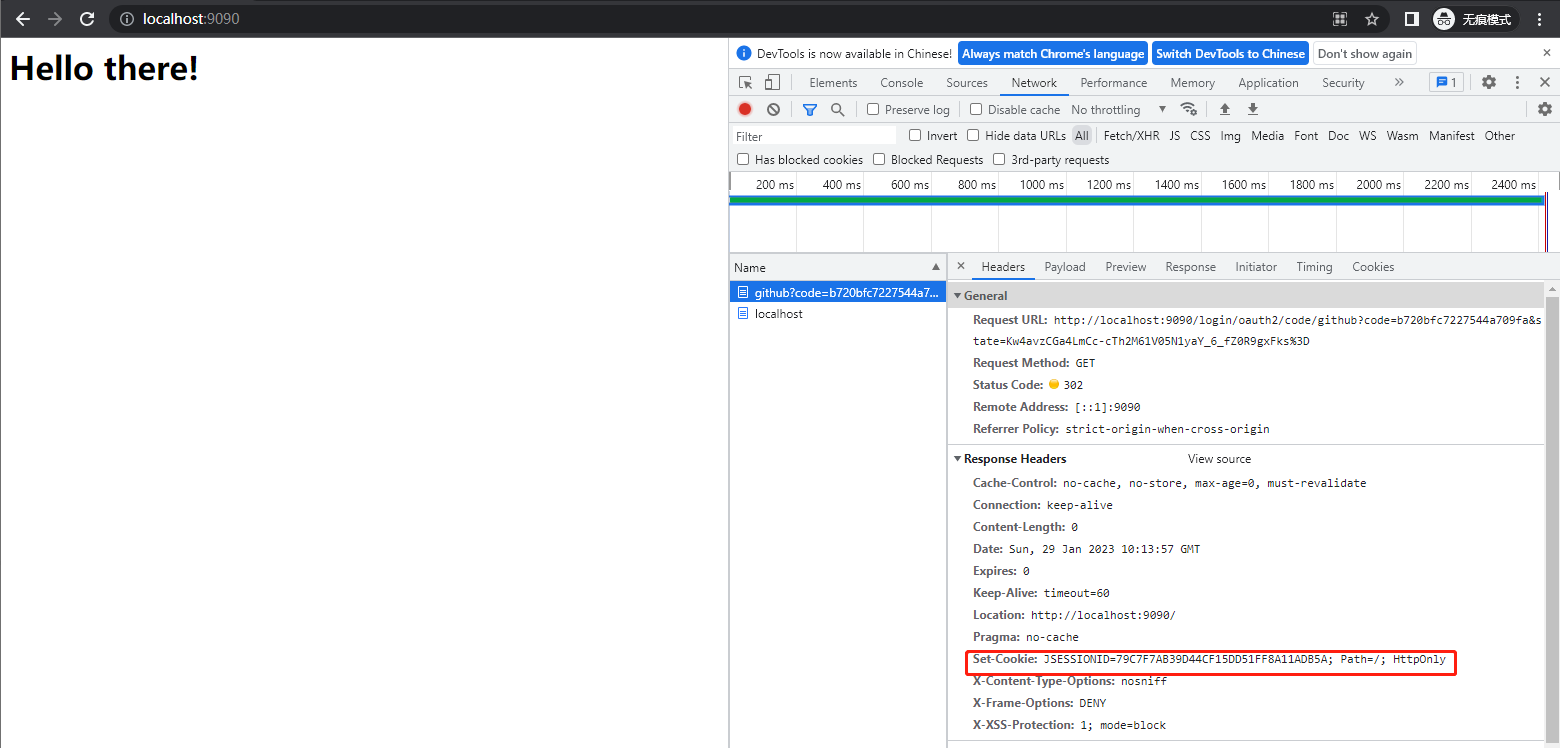
Spring Security in Action 第十二章 OAuth 2是如何工作的?
本专栏将从基础开始,循序渐进,以实战为线索,逐步深入SpringSecurity相关知识相关知识,打造完整的SpringSecurity学习步骤,提升工程化编码能力和思维能力,写出高质量代码。希望大家都能够从中有所收获&#…...
天工开物 #5 我的 Linux 开发机
首先说一下结论:最终我选择了基于 Arch Linux[1] 的 Garuda Linux[2] 发行版作为基础来搭建自己的 Linux 开发机。Neofetch 时刻发行版的选择在上周末的这次折腾里,我一共尝试了 Garuda Linux 发行版,原教旨的 Arch Linux 发行版,…...
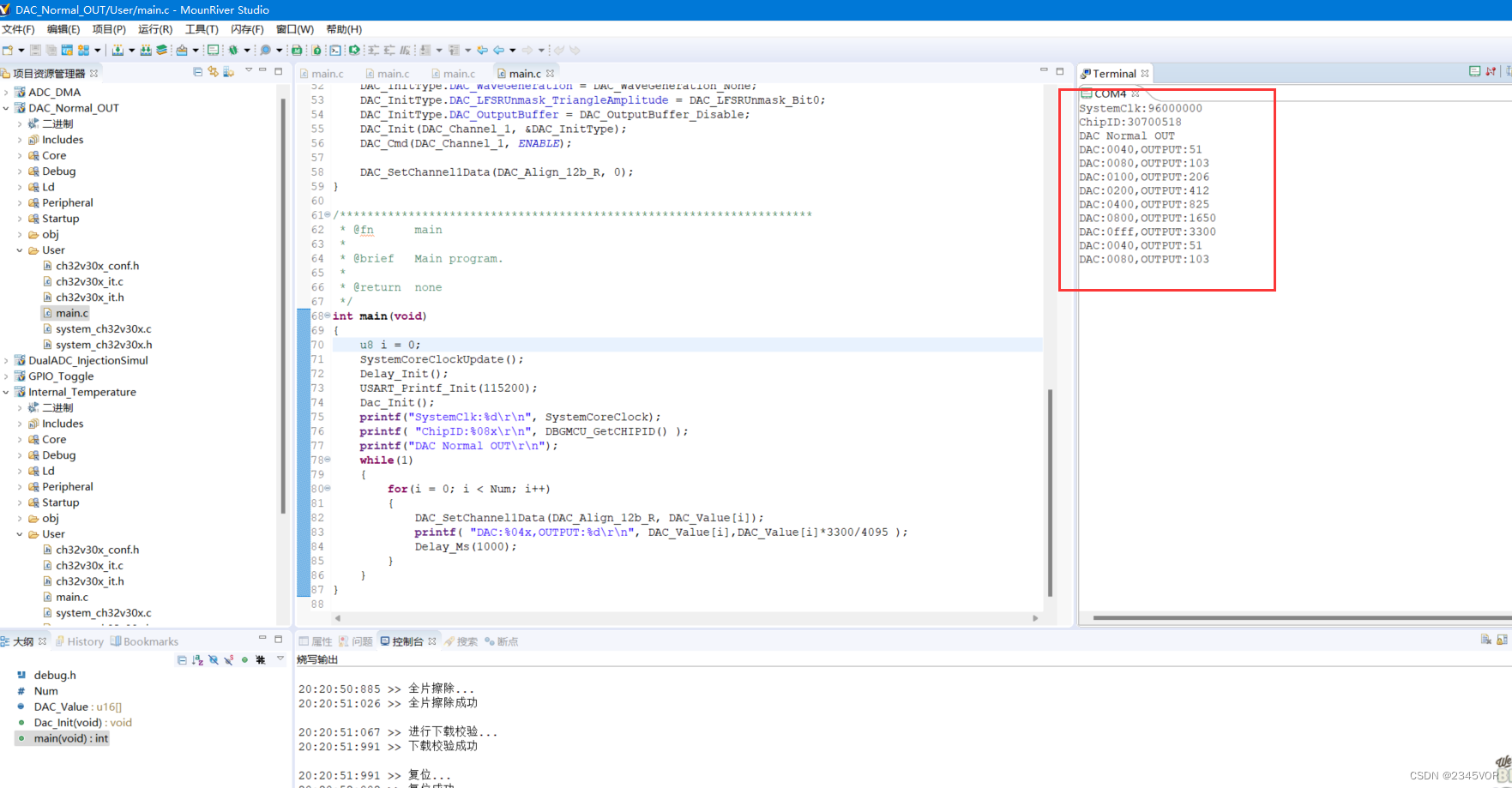
【沁恒WCH CH32V307V-R1开发板输出DAC实验】
【沁恒WCH CH32V307V-R1开发板输出DAC实验】1. 前言2. 软件配置2.1 安装MounRiver Studio3. DAC项目测试3.1 打开DAC工程3.2 编译项目4. 下载验证4.1 接线4.2 演示效果5. 小结1. 前言 数字/模拟转换模块(DAC),包含 2 个可配置 8/12 位数字输入…...
Linux进程控制详解
目录前言一、进程创建1.1 fork函数初识1.2 写时拷贝1.3 fork常规用法1.4 fork调用失败的原因二、进程终止2.1 进程终止时,操作系统做了什么??2.2 进程终止的常见方式有哪些??2.3 如何用代码终止一个进程三、进程等待3.…...

C语言深度剖析之程序环境和预处理
1.程序的翻译环境和执行环境 第一种是翻译环境,在这个环境中源代码被转换为可执行的机器指令 第二种是执行环境,它用于实际执行代码 2.翻译环境 分为四个阶段 预编译阶段 ,编译,汇编,链接 程序编译过程:多个…...
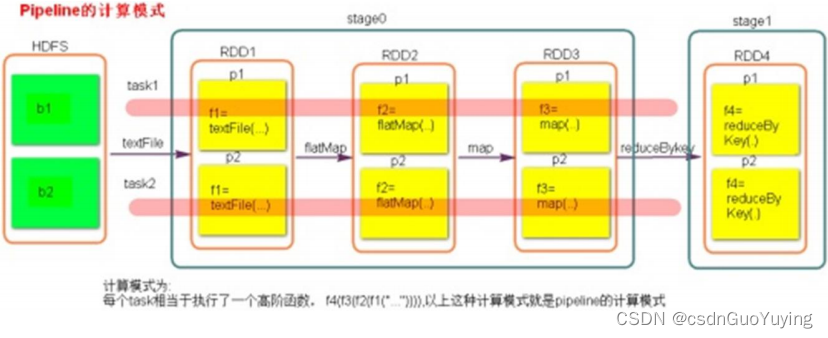
【Spark分布式内存计算框架——Spark Core】9. Spark 内核调度(上)
第八章 Spark 内核调度 Spark的核心是根据RDD来实现的,Spark Scheduler则为Spark核心实现的重要一环,其作用就是任务调度。Spark的任务调度就是如何组织任务去处理RDD中每个分区的数据,根据RDD的依赖关系构建DAG,基于DAG划分Stag…...
: Graphics pipeline之Render passes(渲染通道))
Vulkan教程(15): Graphics pipeline之Render passes(渲染通道)
Vulkan官方英文原文: https://vulkan-tutorial.com/Drawing_a_triangle/Graphics_pipeline_basics/Render_passes对应的Vulkan技术规格说明书版本: Vulkan 1.3.2Setup设置Before we can finish creating the pipeline, we need to tell Vulkan about the…...
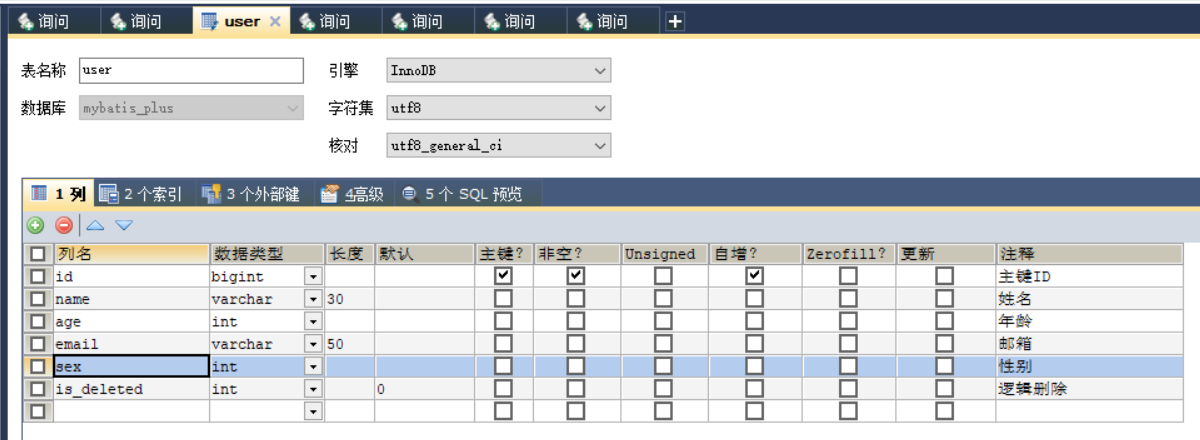
乐观锁、雪花算法、MyBatis-Plus多数据源
乐观锁、雪花算法、MyBatis-Plus多数据源e>雪花算法2、乐观锁a>场景b>乐观锁与悲观锁c>模拟修改冲突d>乐观锁实现流程e>Mybatis-Plus实现乐观锁七、通用枚举a>数据库表添加字段sexb>创建通用枚举类型c>配置扫描通用枚举d>测试九、多数据源1、创建…...
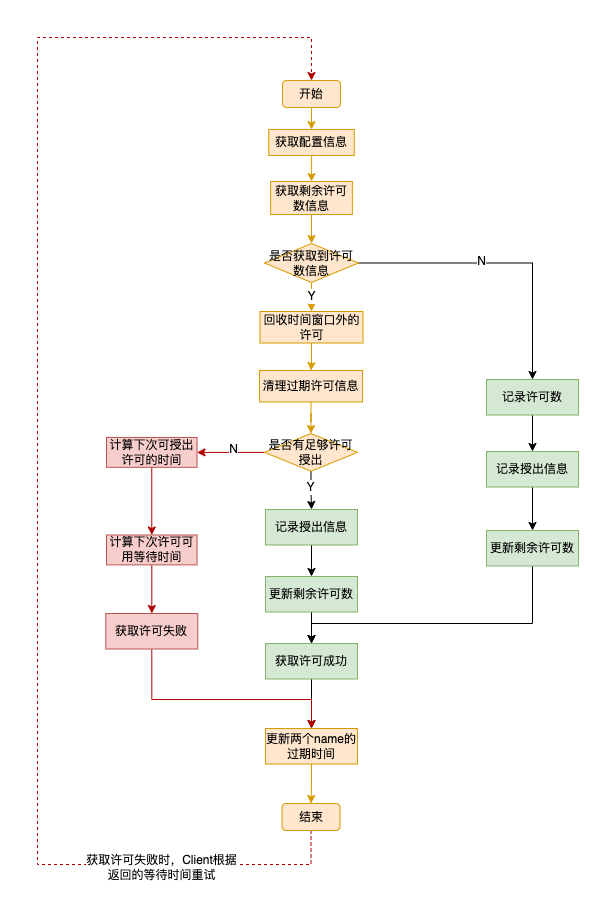
详解Redisson分布式限流的实现原理
我们目前在工作中遇到一个性能问题,我们有个定时任务需要处理大量的数据,为了提升吞吐量,所以部署了很多台机器,但这个任务在运行前需要从别的服务那拉取大量的数据,随着数据量的增大,如果同时多台机器并发…...

[python入门㊹] - python测试类
目录 ❤ 断言方法 assertEqual 和 assertNotEqual assertTrue 和 assertFalse assertIsNone 和 assertIsNotNone ❤ 一个要测试的类 ❤ 测试AnonymousSurvey类 ❤ setUp() 和 teardown() 方法 ❤ 断言方法 常用的断言方法: 方法 用途 assertEqual(a, b) 核实a …...
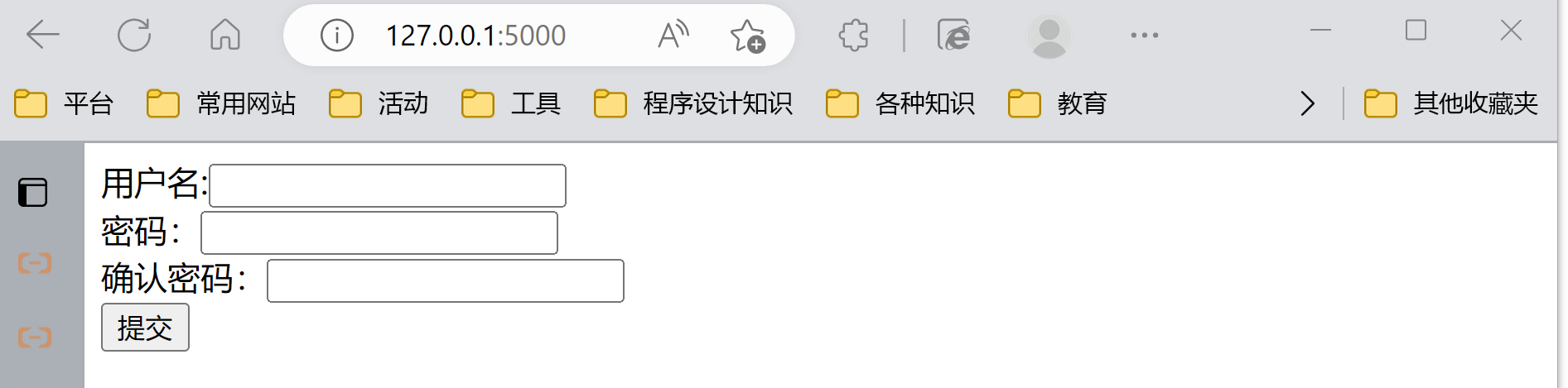
Web 框架 Flask 快速入门(二)表单
课程地址:Python Web 框架 Flask 快速入门 文章目录🌴 表单1、表单介绍2、表单的简单实现1. 代码2. 代码的执行逻辑3、使用wtf扩展实现4、bug记录:表单验证总是失败🌴 表单 1、表单介绍 当我们在网页上填写账号密码进行登录的时…...

C++基础(5) - 复合类型(上)
文章目录数组1、什么是数组2、数组的声明3、数组的初始化4、数组的访问5、二维数组6、memset —— 给数组中每一个元素赋同样的值字符串(字符数组)1、string.h 头文件1.1 strlen()1.2 strcmp()1.3 strcpy()1.4 strcat()string 类简介1、C11 字符串初始化…...

工业DC-DC电源模块性能选型解析|钡特电源 VB15-48S24MD 与 URB4824YMD-15WR3 封装互通
在工业控制、通信设备、仪器仪表等领域,工业 DC-DC 模块电源作为核心供电单元,其稳定性、兼容性与性价比直接影响系统整体可靠性。随着国产化进程加速,国产工业电源模块在技术、品质上已达到国际先进水平,成为硬件工程师选型的重要…...

别再死记硬背截止、放大、饱和了!用Arduino+面包板,5分钟直观理解NPN/PNP三极管
用Arduino实验破解三极管的三大工作状态之谜 记得第一次翻开电子学教材看到三极管章节时,那些密密麻麻的曲线图和公式让我头皮发麻。"截止区"、"放大区"、"饱和区"——这些抽象概念就像天书一样难以理解。直到有一天,我拿…...

BiliBili-UWP:Windows 10/11 上最流畅的第三方B站客户端完全指南
BiliBili-UWP:Windows 10/11 上最流畅的第三方B站客户端完全指南 【免费下载链接】BiliBili-UWP BiliBili的UWP客户端,当然,是第三方的了 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBili-UWP 还在为网页版B站卡顿和操作不便而…...

汽车电子安全:从CAN总线到纵深防御的嵌入式安全实战
1. 从“汽车黑客”到“数字堡垒”:一位嵌入式工程师的十年安全观演进十多年前,当EE Times那场关于“汽车黑客是否值得担忧”的在线聊天发起时,我正埋头于一个汽车ECU(电子控制单元)的底层驱动开发。彼时,“…...

MTKClient实用指南:三步解锁联发科设备的终极解决方案
MTKClient实用指南:三步解锁联发科设备的终极解决方案 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient MTKClient是一款专为联发科芯片设备设计的开源逆向工程与刷机工具&#x…...

基于MCP协议连接AI与CDP:BlueConic-MCP项目实战解析
1. 项目概述:当营销技术遇上AI代理最近在折腾AI应用开发,特别是围绕OpenAI的Assistant API和各类AI Agent框架时,有一个痛点越来越明显:这些智能体能力再强,如果它们对业务的核心数据一无所知,那也只是一个…...

AMBA CHI协议Issue F更新解析与SoC设计优化
1. AMBA CHI Issue F协议更新深度解析AMBA CHI(Coherent Hub Interface)作为Arm体系结构中的关键一致性协议,在多核处理器设计中扮演着至关重要的角色。最新发布的Issue F版本对协议规范进行了多项重要修正,这些变更直接影响SoC设…...

Midjourney生成图落地PS的7大断层痛点:从提示词对齐、分辨率陷阱到图层级精修,一文打通AI与专业图像处理全链路
更多请点击: https://intelliparadigm.com 第一章:Midjourney与Photoshop整合方案的底层逻辑与工作流重构 Midjourney 生成的图像虽具高美学质量,但缺乏图层控制、非破坏性编辑及像素级精度,而 Photoshop 正是弥补这一缺口的核心…...

浏览器高阶使用指南:从基础操作到效率系统构建
1. 项目概述:浏览器,远不止是“上网”那么简单“abczsl520/browser-use-skill”这个项目名,乍一看可能会觉得有点“标题党”——浏览器使用技巧?这谁不会啊?点开、输入网址、回车,不就完了吗?如…...

《深入浅出通信原理》连载101-105
连载101:正弦信号的傅立叶变换连载102:直流信号的傅立叶变换连载103:复指数信号傅立叶变换的另外一种求法连载104:非周期信号的傅立叶变换连载105:傅立叶变换的对称性(一)...