ROS系统中解析通过CAN协议传输的超声波传感器数据
-
CAN Bus接口设置:确保你的ROS系统可以通过CAN Bus接口与外部设备通信。这可能需要CAN卡或CAN适配器,以及相应的驱动程序和库。
-
CAN消息接收:配置ROS节点来监听特定的CAN ID,这通常是超声波传感器的标识符。
-
数据解析:从接收到的CAN消息中解析出超声波传感器的数据。这通常涉及理解传感器制造商提供的数据格式。
-
消息发布:将解析后的数据转换为ROS可以理解的消息类型,例如
sensor_msgs/Range,并将其发布到ROS话题中。 -

下面是一个使用ROS和can_msgs包的基本示例,展示如何接收和解析CAN消息,然后发布为sensor_msgs/Range消息。假设每个超声波传感器都有一个独特的CAN ID,并且它们的数据格式是已知的。
#include <ros/ros.h>
#include <can_msgs/Frame.h>
#include <sensor_msgs/Range.h>// 用于存储和发布超声波数据的全局变量
ros::Publisher pub;// 定义一个回调函数来处理接收到的CAN消息
void canCallback(const can_msgs::FrameConstPtr& msg)
{if (msg->id == 0x123) // 假设0x123是超声波传感器的CAN ID{// 解析CAN数据为超声波距离uint8_t data[8] = {msg->data[0], msg->data[1], msg->data[2], msg->data[3],msg->data[4], msg->data[5], msg->data[6], msg->data[7]};// 假设距离数据在前两个字节,以毫米为单位uint16_t distance_mm = (data[0] << 8) | data[1];double distance_m = distance_mm / 1000.0;// 创建并填充Range消息sensor_msgs::Range range_msg;range_msg.header.stamp = ros::Time::now();range_msg.header.frame_id = "ultrasonic_link";range_msg.radiation_type = sensor_msgs::Range::ULTRASOUND;range_msg.field_of_view = M_PI / 180 * 30; // 30度视场角range_msg.min_range = 0.1;range_msg.max_range = 5.0;range_msg.range = distance_m;// 发布超声波数据pub.publish(range_msg);}
}int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "ultrasonic_can_node");ros::NodeHandle nh;// 设置订阅者来接收CAN消息ros::Subscriber sub = nh.subscribe("can_recv", 1000, canCallback);// 设置发布者来发布超声波数据pub = nh.advertise<sensor_msgs::Range>("ultrasonic", 1000);// 开始循环,处理ROS事件ros::spin();return 0;
}在这个示例中,can_msgs/Frame类型用于接收CAN消息,sensor_msgs/Range类型用于发布超声波数据。你需要注意的是,解析CAN数据的具体方式将取决于传感器制造商的规范,因此你需要查阅相关文档来确定正确的解析方法。
此外,你还需要确保你的ROS环境已经安装了必要的CAN Bus支持,例如ros-<distro>-can-msgs和ros-<distro>-can-interface包,其中<distro>是你的ROS发行版名称,例如melodic或foxy等。
相关文章:
ROS系统中解析通过CAN协议传输的超声波传感器数据
CAN Bus接口设置:确保你的ROS系统可以通过CAN Bus接口与外部设备通信。这可能需要CAN卡或CAN适配器,以及相应的驱动程序和库。 CAN消息接收:配置ROS节点来监听特定的CAN ID,这通常是超声波传感器的标识符。 数据解析:…...
SonarQube安全扫描常见问题
目录 一、SonarQube质量报告 二、SonarQube扫描常见问题和修复方法 三、SonarQube质量配置 最近小编在使用SonarQube工具进行代码扫描,检查代码异味,系统漏洞等,实际过程中也遇到了不少问题,这篇文章主要列举我遇到的常见问题和…...
Golang内存模型与分配机制
简述 mheap为堆,堆和进程是一对一的;mcentral(小mheadp),mcahe(GMP的P私有),分配内存顺序由后向前。 在解决这个问题,Golang 在堆 mheap 之上,依次细化粒度&a…...
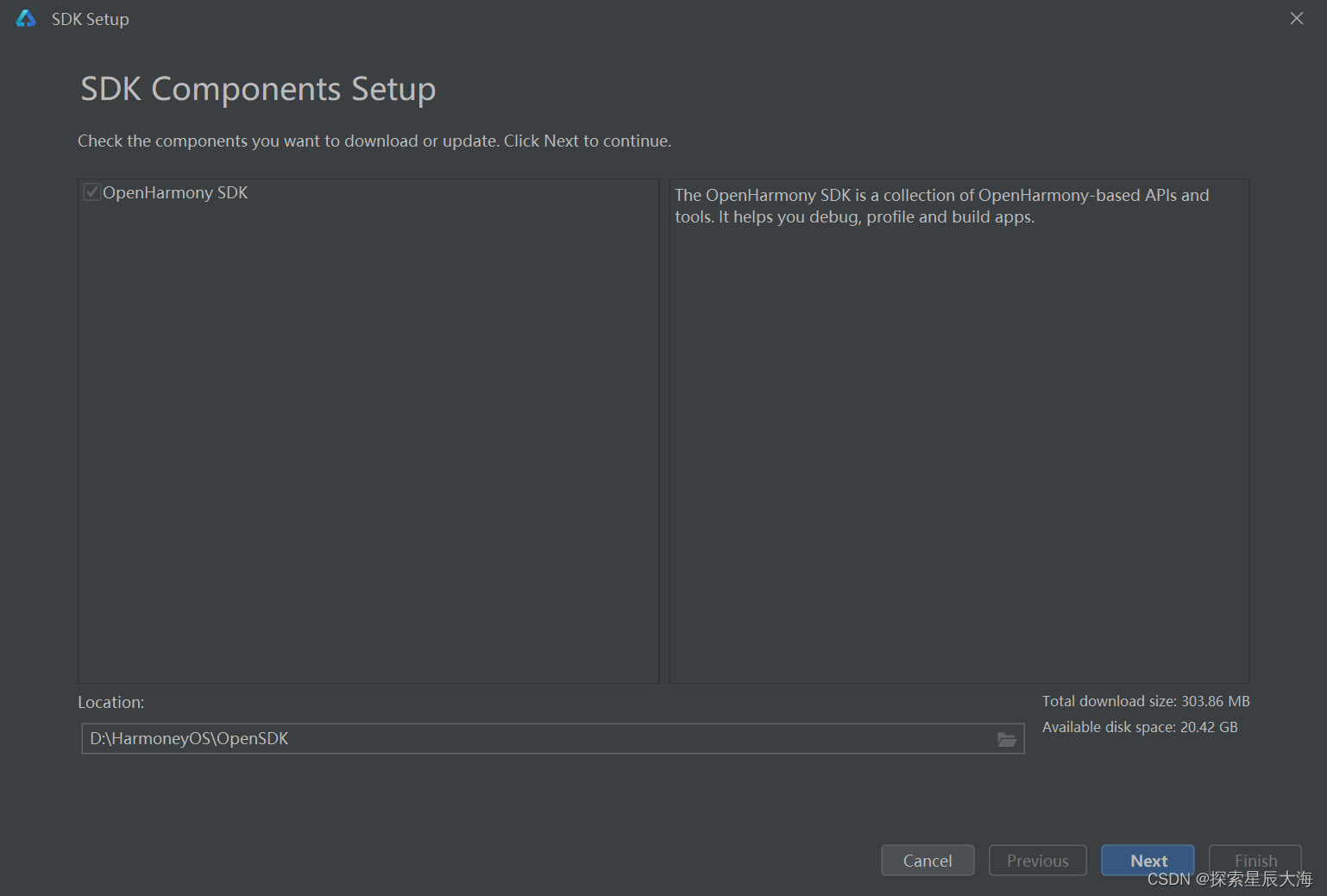
HarmoneyOS星河版 安装和启动
一、下载和安装DevEco Studio 官网链接:OpenAtom OpenHarmony 1.1 找到对应的操作系统进行下载 创建安装Harmony的文件夹: 1.2 下载后进行安装 1.3 分别安装Node、Ohpm、SDK 分别安装Node、Ohpm和SDK 二、.创建一个新项目并运行 2.1 选择[OpenHarmon…...

奇舞周刊第530期:AIGC和低代码结合应用全栈研发实践总结
周五快乐(图片由midjourney生成) 奇舞推荐 ■ ■ ■ AIGC 和低代码结合应用全栈研发实践总结 得物通过低代码和大模型技术简化电商供应链系统开发。尽管低代码工具存在一些局限,但结合大模型生成脚本和理解配置,提高了效率。未来将…...

linux上运行js脚本
貌似学运维,啥都要懂一点儿?????? 我们将使用 Node.js 和 ES6 模块语法。 首先,确保你已经安装了 Node.js。 创建项目文件结构 假设我们的项目结构如下: my_project/…...

PCA 在图像分析上的应用
同一物体旋转角度求取 直接上代码: import cv2, os import numpy as np import timedef perform_pca(image, num_components):# 将图像转换为浮点型img_float np.float32(image)img_flatten img_float.reshape(-1, 2)# 计算均值和协方差矩阵mean, eigenvectors …...
springboot项目mapper无法自动装配,未找到 ‘userMapper‘ 类型的Bean解决办法.
一开始我看到了这个回答:springboot项目mapper无法自动装配,未找到 ‘userMapper‘ 类型的 Bean解决办法(含报错原因)_无法自动装配。找不到 usermapper 类型的 bean。-CSDN博客 mapper无法自动装配,未找到 ‘userMap…...
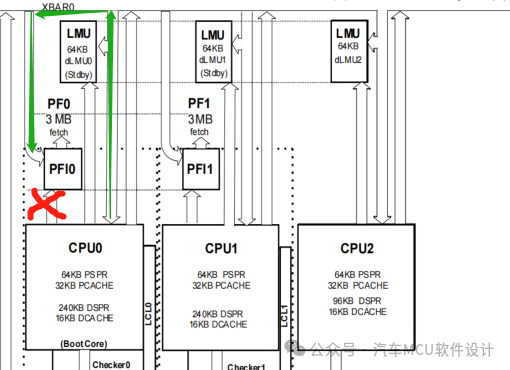
TC3xx A\B SWAP机制的小细节(2)
目录 1.引入 2.TC3xx Swap机制小细节 3.小结 1.引入 上文TC3xx A\B SWAP机制的小细节(1)-CSDN博客主要把OTA的概念,以及MCU的硬件A\B Swap机制做了简单介绍,下面我们来聊聊TC3xx的SWAP机制 2.TC3xx Swap机制小细节 英飞凌TC3xx提供了硬件SOTA机制&…...
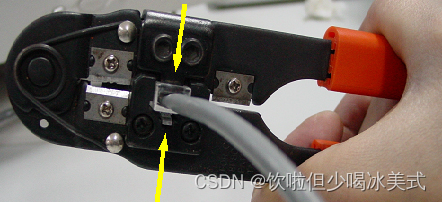
双绞线(网线)的制作与测试
实验目的 1、熟悉常用双绞线(网线)及其制作工具的使用; 2、掌握非屏蔽双绞线的直通线、交叉线的制作及连接方法; 3、掌握双绞线连通性的测试。 设备要求:RJ45压线钳,RJ45水晶头,UTP线缆&…...

高效处理海量慢SQL日志文件:Java与JSQLParser去重方案详解
在大数据处理环境下,慢SQL日志优化是一个必要的步骤,尤其当日志文件达到数GB时,直接操作日志文件会带来诸多不便。本文将介绍如何通过Java和JSQLParser库来解析和去重慢SQL日志,以提高性能和可维护性。 背景 公司生产环境中&…...

企业内部、与合作伙伴/客户文档协作如何高效安全地收集资料?
在企业的日常运营与对外合作中,「文件收集」是一项特别常见的文档协作需求。例如,公司举办项目经验分享大会,组织者需要提前收集演讲者的材料;新项目启动时,项目经理需要快速收集技术方案和报价方案以便招投标和商务活…...

用Unity创造自己的绿洲
“谢谢你能玩我的游戏!” 希望将来我也能做出一款影响全世界的游戏,就比如现在的《英雄联盟》,或是电影里的《绿洲》!然后也说出这么一句话:谢谢你能玩我的游戏! 阶段性的总结一下 那就展示一下最近完成的…...
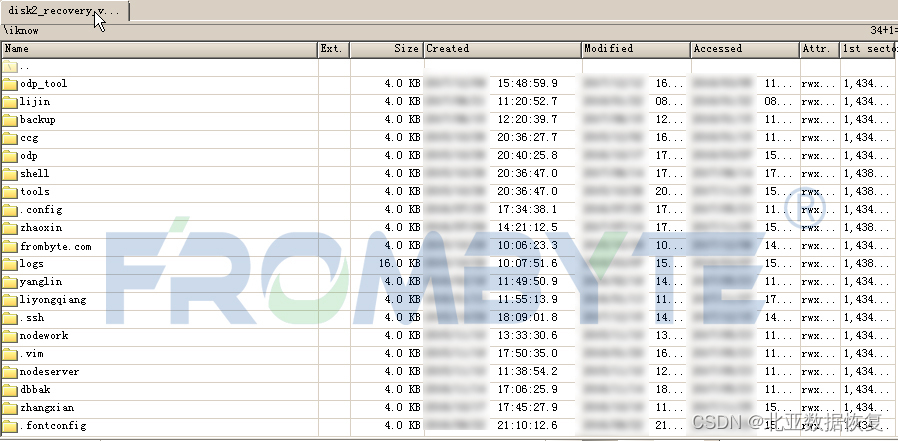
服务器数据恢复—KVM虚拟机被误删除如何恢复虚拟磁盘文件?
服务器数据恢复环境&故障: 1台服务器,Linux操作系统EXT4文件系统,部署了数台KVM虚拟机,每台虚拟机包含一个qcow2格式的磁盘文件,和一个raw格式的磁盘文件。 工作人员操作失误删除了3台服务器上的KVM虚拟机…...

工具清单 - 看板工具
# 工具清单 Crepido在新窗口打开 - Create (kanban) boards to track users and projects from flat markdown files. MIT NodejsKanboard在新窗口打开 - Simple and open source visual task board. (Source Code在新窗口打开) MIT PHPmyTinyTodo在新窗口打开 - Simple way t…...

Go微服务: 分布式之发送带有事务消息的示例
分布式之发送带有事务消息 现在做一个RocketMQ的事务消息的 demo 1 )生产者 package mainimport ("context""fmt""time""github.com/apache/rocketmq-client-go/v2""github.com/apache/rocketmq-client-go/v2/prim…...

【go】go初始化命令总结
包初始化 test项目目录下执行 go mod init test go mod tidy生成二进制可执行文件 go build -o test .\main.go...

vue音乐播放条
先看效果 再看代码 <template><div class"footer-player z-30 flex items-center p-2"><div v-if"isShow" class"h-12 w-60 overflow-hidden"><div :style"activeStyle" class"open-detail-control-wrap&…...

halcon实现浓淡补正,中间值补正-抽取暗
代码效果 抽取前 中值抽取暗 halcon函数代码 测试图片参数 NoiseCut:16 Gain:1 输入ImagePart NoiseCut Gain *获取直方图 get_domain (ImagePart, Domain) gray_histo_range(Domain,ImagePart,0,255,256, Histo, BinSize) area_center(Domain, NumPixels, Row, Column) …...
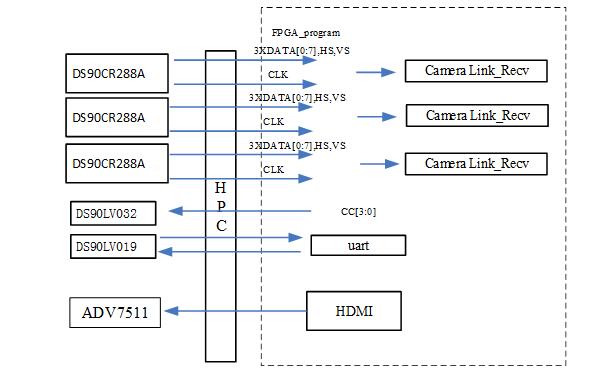
太速科技-FMC213V3-基于FMC兼容1.8V IO的Full Camera Link 输入子卡
FMC213V3-基于FMC兼容1.8V IO的Full Camera Link 输入子卡 一、板卡概述 该板卡为了考虑兼容1.8V电平IO,适配Virtex7,Kintex Ultrascale,Virtex ultrasacle FPGA而特制,如果要兼容原来的3.3V 也可以修改硬件参数。板卡支持1路…...

拆解工业级压力传感器核心:陶瓷电容vs陶瓷电阻,ME505与NSA2862如何选型?
工业级压力传感器技术选型指南:陶瓷电容与陶瓷电阻的深度对比与实战选型 在工业物联网和智慧城市建设的浪潮中,压力传感器作为关键感知元件,其性能直接影响整个系统的可靠性与寿命。面对市场上琳琅满目的传感器类型,工程师们常常陷…...
)
保姆级教程:用Winbox给ROS配置一线多拨,实测200M宽带叠加效果(附避坑指南)
家庭网络优化实战:Winbox配置多拨提升宽带利用率 家里装了200M宽带,但下载大文件时总觉得速度没跑满?多人同时在线看4K视频就开始卡顿?其实通过简单的路由器配置,你完全有可能突破运营商单线限制,让宽带利用…...

如何为Unity游戏添加多语言支持:XUnity.AutoTranslator完整指南
如何为Unity游戏添加多语言支持:XUnity.AutoTranslator完整指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 你是否曾经因为语言障碍而无法享受心爱的Unity游戏?是否想要为你的…...

Vcpkg不只是个安装器:在Windows上用它为你的C++项目打造可复现的构建环境
Vcpkg工程化实践:构建可复现的C开发环境 在大型C项目中,依赖管理一直是开发者面临的痛点之一。不同团队成员使用不同版本的第三方库,CI服务器上的构建环境与本地开发环境不一致,这些问题常常导致"在我机器上能运行"的尴…...
)
从IR2184到全桥驱动:搞懂H桥电路防短路与死区设置(附电路图分析)
从IR2184到全桥驱动:H桥电路防短路与死区设置的工程实践 在电机控制系统中,H桥电路的设计可靠性直接决定了整个驱动方案的成败。许多工程师在初次设计基于IR2184的全桥驱动时,往往会被"上下桥臂直通"问题困扰——这种短路状态能在微…...

Efficient-KAN:突破传统神经网络瓶颈的Kolmogorov-Arnold网络实战指南
Efficient-KAN:突破传统神经网络瓶颈的Kolmogorov-Arnold网络实战指南 【免费下载链接】efficient-kan An efficient pure-PyTorch implementation of Kolmogorov-Arnold Network (KAN). 项目地址: https://gitcode.com/GitHub_Trending/ef/efficient-kan 深…...

NLTK数据包高效部署与下载加速实战
1. NLTK数据包下载慢?这些方法让你效率翻倍 第一次用NLTK跑自然语言处理项目时,我在数据包下载环节卡了整整三小时。看着进度条像蜗牛爬行,我甚至怀疑是不是网络断了。后来才发现,这是所有NLTK初学者都会遇到的经典问题——由于默…...

Postmate部署实战:从开发到生产的完整流程
Postmate部署实战:从开发到生产的完整流程 【免费下载链接】postmate 📭 A powerful, simple, promise-based postMessage library. 项目地址: https://gitcode.com/gh_mirrors/po/postmate Postmate是一个强大的、简单的、基于Promise的postMess…...

GitHub 开源育儿知识库:技术型父母如何用 Awesome List 构建科学育儿体系
1. 项目概述:一个为新手父母量身定制的技能宝库当一个小生命降临,新手父母们常常会陷入一种既幸福又焦虑的复杂情绪中。幸福自不必说,那份焦虑则大多源于“未知”——面对一个不会说话、只会用哭声表达一切的小家伙,如何判断他是饿…...

终极指南:如何使用Chrome插件markdownReader提升Markdown阅读体验
终极指南:如何使用Chrome插件markdownReader提升Markdown阅读体验 【免费下载链接】markdownReader markdownReader is a extention for chrome, used for reading markdown file. 项目地址: https://gitcode.com/gh_mirrors/ma/markdownReader 还在为浏览器…...