RK3568 CAN波特率500K接收数据导致CPU4满载
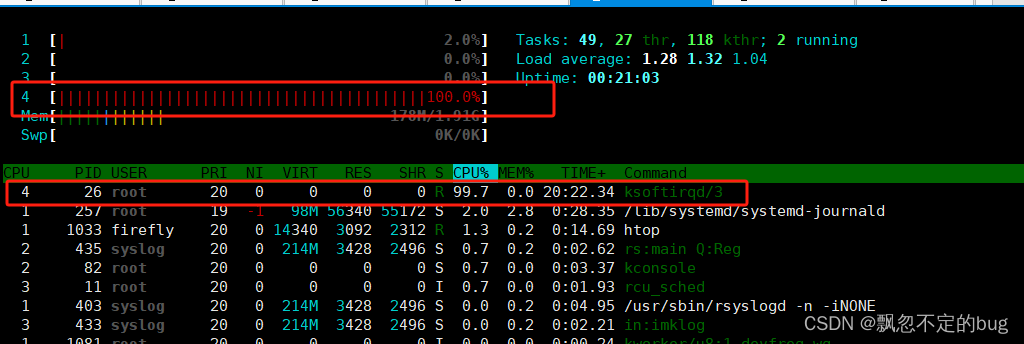
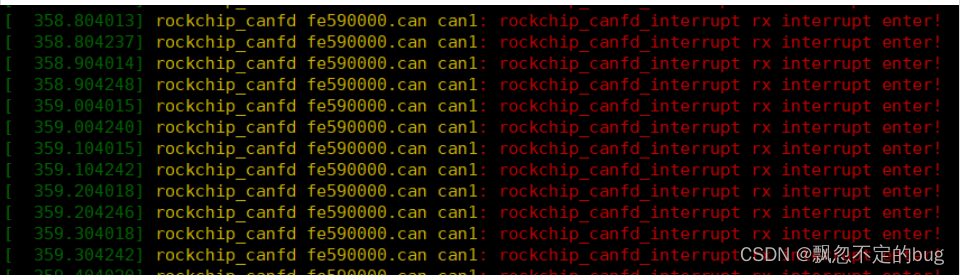
最近调试RK3568 CAN时发现,当CAN作为接收端,在快速接收数据时会导致cpu4满载。down掉can口或者断开外设时恢复正常。并且问题只是在部门CPU版本上出现。在CAN接收中断中打印log,能发现log是按照接收数据的时间打印的。
驱动(rockchip_canfd.c)中关闭NAPI后正常,厂家的回复是“有的产品api不同,NAPI方式并不适用”。
// SPDX-License-Identifier: GPL-2.0
/** Copyright (c) 2020 Rockchip Electronics Co. Ltd.* Rockchip CANFD driver*/#include <linux/delay.h>
#include <linux/iopoll.h>
#include <linux/pinctrl/consumer.h>
#include <linux/clk.h>
#include <linux/errno.h>
#include <linux/init.h>
#include <linux/interrupt.h>
#include <linux/io.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/netdevice.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/platform_device.h>
#include <linux/skbuff.h>
#include <linux/spinlock.h>
#include <linux/string.h>
#include <linux/types.h>
#include <linux/can/dev.h>
#include <linux/can/error.h>
#include <linux/can/led.h>
#include <linux/reset.h>
#include <linux/pm_runtime.h>
#include <linux/rockchip/cpu.h>/* registers definition */
enum rockchip_canfd_reg {CAN_MODE = 0x00,CAN_CMD = 0x04,CAN_STATE = 0x08,CAN_INT = 0x0c,CAN_INT_MASK = 0x10,CAN_LOSTARB_CODE = 0x28,CAN_ERR_CODE = 0x2c,CAN_RX_ERR_CNT = 0x34,CAN_TX_ERR_CNT = 0x38,CAN_IDCODE = 0x3c,CAN_IDMASK = 0x40,CAN_TX_CHECK_FIC = 0x50,CAN_NBTP = 0x100,CAN_DBTP = 0x104,CAN_TDCR = 0x108,CAN_TSCC = 0x10c,CAN_TSCV = 0x110,CAN_TXEFC = 0x114,CAN_RXFC = 0x118,CAN_AFC = 0x11c,CAN_IDCODE0 = 0x120,CAN_IDMASK0 = 0x124,CAN_IDCODE1 = 0x128,CAN_IDMASK1 = 0x12c,CAN_IDCODE2 = 0x130,CAN_IDMASK2 = 0x134,CAN_IDCODE3 = 0x138,CAN_IDMASK3 = 0x13c,CAN_IDCODE4 = 0x140,CAN_IDMASK4 = 0x144,CAN_TXFIC = 0x200,CAN_TXID = 0x204,CAN_TXDAT0 = 0x208,CAN_TXDAT1 = 0x20c,CAN_TXDAT2 = 0x210,CAN_TXDAT3 = 0x214,CAN_TXDAT4 = 0x218,CAN_TXDAT5 = 0x21c,CAN_TXDAT6 = 0x220,CAN_TXDAT7 = 0x224,CAN_TXDAT8 = 0x228,CAN_TXDAT9 = 0x22c,CAN_TXDAT10 = 0x230,CAN_TXDAT11 = 0x234,CAN_TXDAT12 = 0x238,CAN_TXDAT13 = 0x23c,CAN_TXDAT14 = 0x240,CAN_TXDAT15 = 0x244,CAN_RXFIC = 0x300,CAN_RXID = 0x304,CAN_RXTS = 0x308,CAN_RXDAT0 = 0x30c,CAN_RXDAT1 = 0x310,CAN_RXDAT2 = 0x314,CAN_RXDAT3 = 0x318,CAN_RXDAT4 = 0x31c,CAN_RXDAT5 = 0x320,CAN_RXDAT6 = 0x324,CAN_RXDAT7 = 0x328,CAN_RXDAT8 = 0x32c,CAN_RXDAT9 = 0x330,CAN_RXDAT10 = 0x334,CAN_RXDAT11 = 0x338,CAN_RXDAT12 = 0x33c,CAN_RXDAT13 = 0x340,CAN_RXDAT14 = 0x344,CAN_RXDAT15 = 0x348,CAN_RXFRD = 0x400,CAN_TXEFRD = 0x500,
};enum {ROCKCHIP_CANFD_MODE = 0,ROCKCHIP_CAN_MODE,ROCKCHIP_RK3568_CAN_MODE,ROCKCHIP_RK3568_CAN_MODE_V2,
};#define DATE_LENGTH_12_BYTE (0x9)
#define DATE_LENGTH_16_BYTE (0xa)
#define DATE_LENGTH_20_BYTE (0xb)
#define DATE_LENGTH_24_BYTE (0xc)
#define DATE_LENGTH_32_BYTE (0xd)
#define DATE_LENGTH_48_BYTE (0xe)
#define DATE_LENGTH_64_BYTE (0xf)#define CAN_TX0_REQ BIT(0)
#define CAN_TX1_REQ BIT(1)
#define CAN_TX_REQ_FULL ((CAN_TX0_REQ) | (CAN_TX1_REQ))#define MODE_FDOE BIT(15)
#define MODE_BRSD BIT(13)
#define MODE_SPACE_RX BIT(12)
#define MODE_AUTO_RETX BIT(10)
#define MODE_RXSORT BIT(7)
#define MODE_TXORDER BIT(6)
#define MODE_RXSTX BIT(5)
#define MODE_LBACK BIT(4)
#define MODE_SILENT BIT(3)
#define MODE_SELF_TEST BIT(2)
#define MODE_SLEEP BIT(1)
#define RESET_MODE 0
#define WORK_MODE BIT(0)#define RX_FINISH_INT BIT(0)
#define TX_FINISH_INT BIT(1)
#define ERR_WARN_INT BIT(2)
#define RX_BUF_OV_INT BIT(3)
#define PASSIVE_ERR_INT BIT(4)
#define TX_LOSTARB_INT BIT(5)
#define BUS_ERR_INT BIT(6)
#define RX_FIFO_FULL_INT BIT(7)
#define RX_FIFO_OV_INT BIT(8)
#define BUS_OFF_INT BIT(9)
#define BUS_OFF_RECOVERY_INT BIT(10)
#define TSC_OV_INT BIT(11)
#define TXE_FIFO_OV_INT BIT(12)
#define TXE_FIFO_FULL_INT BIT(13)
#define WAKEUP_INT BIT(14)#define ERR_TYPE_MASK GENMASK(28, 26)
#define ERR_TYPE_SHIFT 26
#define BIT_ERR 0
#define STUFF_ERR 1
#define FORM_ERR 2
#define ACK_ERR 3
#define CRC_ERR 4
#define ERR_DIR_RX BIT(25)
#define ERR_LOC_MASK GENMASK(15, 0)/* Nominal Bit Timing & Prescaler Register (NBTP) */
#define NBTP_MODE_3_SAMPLES BIT(31)
#define NBTP_NSJW_SHIFT 24
#define NBTP_NSJW_MASK (0x7f << NBTP_NSJW_SHIFT)
#define NBTP_NBRP_SHIFT 16
#define NBTP_NBRP_MASK (0xff << NBTP_NBRP_SHIFT)
#define NBTP_NTSEG2_SHIFT 8
#define NBTP_NTSEG2_MASK (0x7f << NBTP_NTSEG2_SHIFT)
#define NBTP_NTSEG1_SHIFT 0
#define NBTP_NTSEG1_MASK (0x7f << NBTP_NTSEG1_SHIFT)/* Data Bit Timing & Prescaler Register (DBTP) */
#define DBTP_MODE_3_SAMPLES BIT(21)
#define DBTP_DSJW_SHIFT 17
#define DBTP_DSJW_MASK (0xf << DBTP_DSJW_SHIFT)
#define DBTP_DBRP_SHIFT 9
#define DBTP_DBRP_MASK (0xff << DBTP_DBRP_SHIFT)
#define DBTP_DTSEG2_SHIFT 5
#define DBTP_DTSEG2_MASK (0xf << DBTP_DTSEG2_SHIFT)
#define DBTP_DTSEG1_SHIFT 0
#define DBTP_DTSEG1_MASK (0x1f << DBTP_DTSEG1_SHIFT)/* Transmitter Delay Compensation Register (TDCR) */
#define TDCR_TDCO_SHIFT 1
#define TDCR_TDCO_MASK (0x3f << TDCR_TDCO_SHIFT)
#define TDCR_TDC_ENABLE BIT(0)#define TX_FD_ENABLE BIT(5)
#define TX_FD_BRS_ENABLE BIT(4)#define FIFO_ENABLE BIT(0)
#define RX_FIFO_CNT0_SHIFT 4
#define RX_FIFO_CNT0_MASK (0x7 << RX_FIFO_CNT0_SHIFT)
#define RX_FIFO_CNT1_SHIFT 5
#define RX_FIFO_CNT1_MASK (0x7 << RX_FIFO_CNT1_SHIFT)#define FORMAT_SHIFT 7
#define FORMAT_MASK (0x1 << FORMAT_SHIFT)
#define RTR_SHIFT 6
#define RTR_MASK (0x1 << RTR_SHIFT)
#define FDF_SHIFT 5
#define FDF_MASK (0x1 << FDF_SHIFT)
#define BRS_SHIFT 4
#define BRS_MASK (0x1 << BRS_SHIFT)
#define DLC_SHIFT 0
#define DLC_MASK (0xF << DLC_SHIFT)#define CAN_RF_SIZE 0x48
#define CAN_TEF_SIZE 0x8
#define CAN_TXEFRD_OFFSET(n) (CAN_TXEFRD + CAN_TEF_SIZE * (n))
#define CAN_RXFRD_OFFSET(n) (CAN_RXFRD + CAN_RF_SIZE * (n))#define CAN_RX_FILTER_MASK 0x1fffffff
#define NOACK_ERR_FLAG 0xc200800
#define CAN_BUSOFF_FLAG 0x20#define DRV_NAME "rockchip_canfd"/* rockchip_canfd private data structure */struct rockchip_canfd {struct can_priv can;struct device *dev;struct napi_struct napi;struct clk_bulk_data *clks;int num_clks;struct reset_control *reset;void __iomem *base;u32 irqstatus;unsigned long mode;int rx_fifo_shift;u32 rx_fifo_mask;bool txtorx;u32 tx_invalid[4];struct delayed_work tx_err_work;u32 noack_cnt;u32 delay_time_ms;
};static inline u32 rockchip_canfd_read(const struct rockchip_canfd *priv,enum rockchip_canfd_reg reg)
{return readl(priv->base + reg);
}static inline void rockchip_canfd_write(const struct rockchip_canfd *priv,enum rockchip_canfd_reg reg, u32 val)
{writel(val, priv->base + reg);
}static const struct can_bittiming_const rockchip_canfd_bittiming_const = {.name = DRV_NAME,.tseg1_min = 1,.tseg1_max = 128,.tseg2_min = 1,.tseg2_max = 128,.sjw_max = 128,.brp_min = 1,.brp_max = 256,.brp_inc = 2,
};static const struct can_bittiming_const rockchip_canfd_data_bittiming_const = {.name = DRV_NAME,.tseg1_min = 1,.tseg1_max = 32,.tseg2_min = 1,.tseg2_max = 16,.sjw_max = 16,.brp_min = 1,.brp_max = 256,.brp_inc = 2,
};static int set_reset_mode(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);reset_control_assert(rcan->reset);udelay(2);reset_control_deassert(rcan->reset);rockchip_canfd_write(rcan, CAN_MODE, 0);netdev_dbg(ndev, "%s MODE=0x%08x\n", __func__,rockchip_canfd_read(rcan, CAN_MODE));return 0;
}static int set_normal_mode(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);u32 val;val = rockchip_canfd_read(rcan, CAN_MODE);val |= WORK_MODE;rockchip_canfd_write(rcan, CAN_MODE, val);netdev_dbg(ndev, "%s MODE=0x%08x\n", __func__,rockchip_canfd_read(rcan, CAN_MODE));return 0;
}/* bittiming is called in reset_mode only */
static int rockchip_canfd_set_bittiming(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);const struct can_bittiming *bt = &rcan->can.bittiming;const struct can_bittiming *dbt = &rcan->can.data_bittiming;u16 brp, sjw, tseg1, tseg2;u32 reg_btp;brp = (bt->brp >> 1) - 1;sjw = bt->sjw - 1;tseg1 = bt->prop_seg + bt->phase_seg1 - 1;tseg2 = bt->phase_seg2 - 1;reg_btp = (brp << NBTP_NBRP_SHIFT) | (sjw << NBTP_NSJW_SHIFT) |(tseg1 << NBTP_NTSEG1_SHIFT) |(tseg2 << NBTP_NTSEG2_SHIFT);if (rcan->can.ctrlmode & CAN_CTRLMODE_3_SAMPLES)reg_btp |= NBTP_MODE_3_SAMPLES;rockchip_canfd_write(rcan, CAN_NBTP, reg_btp);if (rcan->can.ctrlmode & CAN_CTRLMODE_FD) {reg_btp = 0;brp = (dbt->brp >> 1) - 1;sjw = dbt->sjw - 1;tseg1 = dbt->prop_seg + dbt->phase_seg1 - 1;tseg2 = dbt->phase_seg2 - 1;if (dbt->bitrate > 2200000) {u32 tdco;/* Equation based on Bosch's ROCKCHIP_CAN User Manual's* Transmitter Delay Compensation Section*/tdco = (rcan->can.clock.freq / dbt->bitrate) * 2 / 3;/* Max valid TDCO value is 63 */if (tdco > 63)tdco = 63;rockchip_canfd_write(rcan, CAN_TDCR,(tdco << TDCR_TDCO_SHIFT) |TDCR_TDC_ENABLE);}reg_btp |= (brp << DBTP_DBRP_SHIFT) |(sjw << DBTP_DSJW_SHIFT) |(tseg1 << DBTP_DTSEG1_SHIFT) |(tseg2 << DBTP_DTSEG2_SHIFT);if (rcan->can.ctrlmode & CAN_CTRLMODE_3_SAMPLES)reg_btp |= DBTP_MODE_3_SAMPLES;rockchip_canfd_write(rcan, CAN_DBTP, reg_btp);}if (bt->bitrate > 200000)rcan->delay_time_ms = 1;else if (bt->bitrate > 50000)rcan->delay_time_ms = 5;elsercan->delay_time_ms = 20;netdev_dbg(ndev, "%s NBTP=0x%08x, DBTP=0x%08x, TDCR=0x%08x\n", __func__,rockchip_canfd_read(rcan, CAN_NBTP),rockchip_canfd_read(rcan, CAN_DBTP),rockchip_canfd_read(rcan, CAN_TDCR));return 0;
}static int rockchip_canfd_get_berr_counter(const struct net_device *ndev,struct can_berr_counter *bec)
{struct rockchip_canfd *rcan = netdev_priv(ndev);int err;err = pm_runtime_get_sync(rcan->dev);if (err < 0) {netdev_err(ndev, "%s: pm_runtime_get failed(%d)\n",__func__, err);return err;}bec->rxerr = rockchip_canfd_read(rcan, CAN_RX_ERR_CNT);bec->txerr = rockchip_canfd_read(rcan, CAN_TX_ERR_CNT);pm_runtime_put(rcan->dev);netdev_dbg(ndev, "%s RX_ERR_CNT=0x%08x, TX_ERR_CNT=0x%08x\n", __func__,rockchip_canfd_read(rcan, CAN_RX_ERR_CNT),rockchip_canfd_read(rcan, CAN_TX_ERR_CNT));return 0;
}static int rockchip_canfd_start(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);u32 val;/* we need to enter the reset mode */set_reset_mode(ndev);rockchip_canfd_write(rcan, CAN_INT_MASK, 0);/* RECEIVING FILTER, accept all */rockchip_canfd_write(rcan, CAN_IDCODE, 0);rockchip_canfd_write(rcan, CAN_IDMASK, CAN_RX_FILTER_MASK);rockchip_canfd_write(rcan, CAN_IDCODE0, 0);rockchip_canfd_write(rcan, CAN_IDMASK0, CAN_RX_FILTER_MASK);rockchip_canfd_write(rcan, CAN_IDCODE1, 0);rockchip_canfd_write(rcan, CAN_IDMASK1, CAN_RX_FILTER_MASK);rockchip_canfd_write(rcan, CAN_IDCODE2, 0);rockchip_canfd_write(rcan, CAN_IDMASK2, CAN_RX_FILTER_MASK);rockchip_canfd_write(rcan, CAN_IDCODE3, 0);rockchip_canfd_write(rcan, CAN_IDMASK3, CAN_RX_FILTER_MASK);rockchip_canfd_write(rcan, CAN_IDCODE4, 0);rockchip_canfd_write(rcan, CAN_IDMASK4, CAN_RX_FILTER_MASK);/* set mode */val = rockchip_canfd_read(rcan, CAN_MODE);/* rx fifo enable */rockchip_canfd_write(rcan, CAN_RXFC,rockchip_canfd_read(rcan, CAN_RXFC) | FIFO_ENABLE);/* Mode */val |= MODE_FDOE;/* Loopback Mode */if (rcan->can.ctrlmode & CAN_CTRLMODE_LOOPBACK)val |= MODE_SELF_TEST | MODE_LBACK;/* Listen-only mode */if (rcan->can.ctrlmode & CAN_CTRLMODE_LISTENONLY)val |= MODE_SILENT;rockchip_canfd_write(rcan, CAN_MODE, val);rockchip_canfd_set_bittiming(ndev);set_normal_mode(ndev);rcan->can.state = CAN_STATE_ERROR_ACTIVE;netdev_dbg(ndev, "%s MODE=0x%08x, INT_MASK=0x%08x\n", __func__,rockchip_canfd_read(rcan, CAN_MODE),rockchip_canfd_read(rcan, CAN_INT_MASK));return 0;
}static int rockchip_canfd_stop(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);rcan->can.state = CAN_STATE_STOPPED;/* we need to enter reset mode */set_reset_mode(ndev);/* disable all interrupts */rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);netdev_dbg(ndev, "%s MODE=0x%08x, INT_MASK=0x%08x\n", __func__,rockchip_canfd_read(rcan, CAN_MODE),rockchip_canfd_read(rcan, CAN_INT_MASK));return 0;
}static int rockchip_canfd_set_mode(struct net_device *ndev,enum can_mode mode)
{int err;switch (mode) {case CAN_MODE_START:err = rockchip_canfd_start(ndev);if (err) {netdev_err(ndev, "starting CAN controller failed!\n");return err;}if (netif_queue_stopped(ndev))netif_wake_queue(ndev);break;default:return -EOPNOTSUPP;}return 0;
}static void rockchip_canfd_tx_err_delay_work(struct work_struct *work)
{struct rockchip_canfd *rcan =container_of(work, struct rockchip_canfd, tx_err_work.work);struct net_device *ndev = dev_get_drvdata(rcan->dev);rockchip_canfd_write(rcan, CAN_MODE,rockchip_canfd_read(rcan, CAN_MODE) | MODE_SPACE_RX);rockchip_canfd_write(rcan, CAN_CMD, CAN_TX0_REQ);rockchip_canfd_write(rcan, CAN_MODE,rockchip_canfd_read(rcan, CAN_MODE) & (~MODE_SPACE_RX));rcan->noack_cnt++;schedule_delayed_work(&rcan->tx_err_work, msecs_to_jiffies(rcan->delay_time_ms));if (rcan->noack_cnt > 50) {cancel_delayed_work(&rcan->tx_err_work);rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);can_bus_off(ndev);rcan->noack_cnt = 0;}
}/* transmit a CAN message* message layout in the sk_buff should be like this:* xx xx xx xx ff ll 00 11 22 33 44 55 66 77* [ can_id ] [flags] [len] [can data (up to 8 bytes]*/
static int rockchip_canfd_start_xmit(struct sk_buff *skb,struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);struct canfd_frame *cf = (struct canfd_frame *)skb->data;u32 id, dlc;u32 cmd = CAN_TX0_REQ;int i;unsigned long flags;if (can_dropped_invalid_skb(ndev, skb))return NETDEV_TX_OK;netif_stop_queue(ndev);if (rockchip_canfd_read(rcan, CAN_CMD) & CAN_TX0_REQ)cmd = CAN_TX1_REQ;/* Watch carefully on the bit sequence */if (cf->can_id & CAN_EFF_FLAG) {/* Extended CAN ID format */id = cf->can_id & CAN_EFF_MASK;dlc = can_len2dlc(cf->len) & DLC_MASK;dlc |= FORMAT_MASK;/* Extended frames remote TX request */if (cf->can_id & CAN_RTR_FLAG)dlc |= RTR_MASK;} else {/* Standard CAN ID format */id = cf->can_id & CAN_SFF_MASK;dlc = can_len2dlc(cf->len) & DLC_MASK;/* Standard frames remote TX request */if (cf->can_id & CAN_RTR_FLAG)dlc |= RTR_MASK;}if ((rcan->can.ctrlmode & CAN_CTRLMODE_FD) && can_is_canfd_skb(skb)) {dlc |= TX_FD_ENABLE;if (cf->flags & CANFD_BRS)dlc |= TX_FD_BRS_ENABLE;}if (rcan->txtorx && rcan->mode <= ROCKCHIP_RK3568_CAN_MODE && cf->can_id & CAN_EFF_FLAG)rockchip_canfd_write(rcan, CAN_MODE,rockchip_canfd_read(rcan, CAN_MODE) | MODE_RXSTX);elserockchip_canfd_write(rcan, CAN_MODE,rockchip_canfd_read(rcan, CAN_MODE) & (~MODE_RXSTX));if (!rcan->txtorx && rcan->mode <= ROCKCHIP_RK3568_CAN_MODE && cf->can_id & CAN_EFF_FLAG) {/* Two frames are sent consecutively.* Before the first frame is tx finished,* the register of the second frame is configured.* Don't be interrupted in the middle.*/local_irq_save(flags);rockchip_canfd_write(rcan, CAN_TXID, rcan->tx_invalid[1]);rockchip_canfd_write(rcan, CAN_TXFIC, rcan->tx_invalid[0]);rockchip_canfd_write(rcan, CAN_TXDAT0, rcan->tx_invalid[2]);rockchip_canfd_write(rcan, CAN_TXDAT1, rcan->tx_invalid[3]);rockchip_canfd_write(rcan, CAN_CMD, CAN_TX0_REQ);rockchip_canfd_write(rcan, CAN_TXID, id);rockchip_canfd_write(rcan, CAN_TXFIC, dlc);for (i = 0; i < cf->len; i += 4)rockchip_canfd_write(rcan, CAN_TXDAT0 + i,*(u32 *)(cf->data + i));can_put_echo_skb(skb, ndev, 0);rockchip_canfd_write(rcan, CAN_CMD, CAN_TX1_REQ);local_irq_restore(flags);return NETDEV_TX_OK;}rockchip_canfd_write(rcan, CAN_TXID, id);rockchip_canfd_write(rcan, CAN_TXFIC, dlc);for (i = 0; i < cf->len; i += 4)rockchip_canfd_write(rcan, CAN_TXDAT0 + i,*(u32 *)(cf->data + i));can_put_echo_skb(skb, ndev, 0);rockchip_canfd_write(rcan, CAN_MODE,rockchip_canfd_read(rcan, CAN_MODE) | MODE_SPACE_RX);rockchip_canfd_write(rcan, CAN_CMD, cmd);rockchip_canfd_write(rcan, CAN_MODE,rockchip_canfd_read(rcan, CAN_MODE) & (~MODE_SPACE_RX));schedule_delayed_work(&rcan->tx_err_work, msecs_to_jiffies(rcan->delay_time_ms));return NETDEV_TX_OK;
}static int rockchip_canfd_rx(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);struct net_device_stats *stats = &ndev->stats;struct canfd_frame *cf;struct sk_buff *skb;u32 id_rockchip_canfd, dlc;int i = 0;u32 __maybe_unused ts, ret;u32 data[16];dlc = rockchip_canfd_read(rcan, CAN_RXFRD);id_rockchip_canfd = rockchip_canfd_read(rcan, CAN_RXFRD);ts = rockchip_canfd_read(rcan, CAN_RXFRD);for (i = 0; i < ARRAY_SIZE(data); i++)data[i] = rockchip_canfd_read(rcan, CAN_RXFRD);if (rcan->mode <= ROCKCHIP_RK3568_CAN_MODE) {/* may be an empty frame */if (!dlc && !id_rockchip_canfd)return 1;if (rcan->txtorx) {if (rockchip_canfd_read(rcan, CAN_TX_CHECK_FIC) & FORMAT_MASK) {ret = rockchip_canfd_read(rcan, CAN_TXID) & CAN_SFF_MASK;if ((id_rockchip_canfd == ret) && !(dlc & FORMAT_MASK))rockchip_canfd_write(rcan, CAN_TX_CHECK_FIC,ts | CAN_TX0_REQ);return 1;}}}/* create zero'ed CAN frame buffer */if (dlc & FDF_MASK)skb = alloc_canfd_skb(ndev, &cf);elseskb = alloc_can_skb(ndev, (struct can_frame **)&cf);if (!skb) {stats->rx_dropped++;return 1;}/* Change CAN data length format to socketCAN data format */if (dlc & FDF_MASK)cf->len = can_dlc2len(dlc & DLC_MASK);elsecf->len = get_can_dlc(dlc & DLC_MASK);/* Change CAN ID format to socketCAN ID format */if (dlc & FORMAT_MASK) {/* The received frame is an Extended format frame */cf->can_id = id_rockchip_canfd;cf->can_id |= CAN_EFF_FLAG;if (dlc & RTR_MASK)cf->can_id |= CAN_RTR_FLAG;} else {/* The received frame is a standard format frame */cf->can_id = id_rockchip_canfd;if (dlc & RTR_MASK)cf->can_id |= CAN_RTR_FLAG;}if (dlc & BRS_MASK)cf->flags |= CANFD_BRS;if (!(cf->can_id & CAN_RTR_FLAG)) {/* Change CAN data format to socketCAN data format */for (i = 0; i < cf->len; i += 4)*(u32 *)(cf->data + i) = data[i / 4];}stats->rx_packets++;stats->rx_bytes += cf->len;netif_rx(skb);can_led_event(ndev, CAN_LED_EVENT_RX);return 1;
}static int rockchip_canfd_get_rx_fifo_cnt(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);int quota = 0;if (read_poll_timeout_atomic(rockchip_canfd_read, quota,(quota & rcan->rx_fifo_mask) >> rcan->rx_fifo_shift,0, 500000, false, rcan, CAN_RXFC))netdev_dbg(ndev, "Warning: get fifo cnt failed\n");quota = (quota & rcan->rx_fifo_mask) >> rcan->rx_fifo_shift;return quota;
}/* rockchip_canfd_rx_poll - Poll routine for rx packets (NAPI)* @napi: napi structure pointer* @quota: Max number of rx packets to be processed.** This is the poll routine for rx part.* It will process the packets maximux quota value.** Return: number of packets received*/
static int rockchip_canfd_rx_poll(struct napi_struct *napi, int quota)
{struct net_device *ndev = napi->dev;struct rockchip_canfd *rcan = netdev_priv(ndev);int work_done = 0;quota = rockchip_canfd_get_rx_fifo_cnt(ndev);if (quota > 6)quota = 6;if (quota) {while (work_done < quota)work_done += rockchip_canfd_rx(ndev);}if (work_done)can_led_event(ndev, CAN_LED_EVENT_RX);if (work_done < 6) {napi_complete_done(napi, work_done);rockchip_canfd_write(rcan, CAN_INT_MASK, 0);}return work_done;
}static void rockchip_canfd_tx_retry(struct net_device *ndev, u32 isr)
{struct rockchip_canfd *rcan = netdev_priv(ndev);u32 err_code = rockchip_canfd_read(rcan, CAN_ERR_CODE);u32 data[4], mode;int i = 0;if ((isr & TX_LOSTARB_INT) || ((!(err_code & 0x2000000)) && (err_code & 0x1ff0000))) {mode = rockchip_canfd_read(rcan, CAN_MODE);for (i = 0; i < ARRAY_SIZE(data); i++)data[i] = rockchip_canfd_read(rcan, CAN_TXFIC + i * 4);rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);rockchip_canfd_start(ndev);rockchip_canfd_write(rcan, CAN_MODE, mode);for (i = 0; i < ARRAY_SIZE(data); i++)rockchip_canfd_write(rcan, CAN_TXFIC + i * 4, data[i]);}
}static int rockchip_canfd_err(struct net_device *ndev, u32 isr)
{struct rockchip_canfd *rcan = netdev_priv(ndev);struct net_device_stats *stats = &ndev->stats;struct can_frame *cf;struct sk_buff *skb;unsigned int rxerr, txerr;u32 sta_reg;skb = alloc_can_err_skb(ndev, &cf);rxerr = rockchip_canfd_read(rcan, CAN_RX_ERR_CNT);txerr = rockchip_canfd_read(rcan, CAN_TX_ERR_CNT);sta_reg = rockchip_canfd_read(rcan, CAN_STATE);if (skb) {cf->data[6] = txerr;cf->data[7] = rxerr;}if (isr & BUS_OFF_INT) {rcan->can.state = CAN_STATE_BUS_OFF;rcan->can.can_stats.bus_off++;cf->can_id |= CAN_ERR_BUSOFF;} else if (isr & ERR_WARN_INT) {rcan->can.can_stats.error_warning++;rcan->can.state = CAN_STATE_ERROR_WARNING;/* error warning state */if (likely(skb)) {cf->can_id |= CAN_ERR_CRTL;cf->data[1] = (txerr > rxerr) ?CAN_ERR_CRTL_TX_WARNING :CAN_ERR_CRTL_RX_WARNING;cf->data[6] = txerr;cf->data[7] = rxerr;}} else if (isr & PASSIVE_ERR_INT) {rcan->can.can_stats.error_passive++;rcan->can.state = CAN_STATE_ERROR_PASSIVE;/* error passive state */cf->can_id |= CAN_ERR_CRTL;cf->data[1] = (txerr > rxerr) ?CAN_ERR_CRTL_TX_WARNING :CAN_ERR_CRTL_RX_WARNING;cf->data[6] = txerr;cf->data[7] = rxerr;}if (rcan->can.state >= CAN_STATE_BUS_OFF ||((sta_reg & CAN_BUSOFF_FLAG) == CAN_BUSOFF_FLAG)) {cancel_delayed_work(&rcan->tx_err_work);rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);can_bus_off(ndev);}stats->rx_packets++;stats->rx_bytes += cf->can_dlc;netif_rx(skb);return 0;
}static irqreturn_t rockchip_canfd_interrupt(int irq, void *dev_id)
{struct net_device *ndev = (struct net_device *)dev_id;struct rockchip_canfd *rcan = netdev_priv(ndev);struct net_device_stats *stats = &ndev->stats;u32 err_int = ERR_WARN_INT | RX_BUF_OV_INT | PASSIVE_ERR_INT |BUS_ERR_INT | BUS_OFF_INT;u32 isr;u32 dlc = 0;u32 quota, work_done = 0;isr = rockchip_canfd_read(rcan, CAN_INT);if (isr & TX_FINISH_INT) {cancel_delayed_work(&rcan->tx_err_work);dlc = rockchip_canfd_read(rcan, CAN_TXFIC);/* transmission complete interrupt */if (dlc & FDF_MASK)stats->tx_bytes += can_dlc2len(dlc & DLC_MASK);elsestats->tx_bytes += (dlc & DLC_MASK);stats->tx_packets++;if (rcan->txtorx && rcan->mode <= ROCKCHIP_RK3568_CAN_MODE && dlc & FORMAT_MASK) {rockchip_canfd_write(rcan, CAN_TX_CHECK_FIC, FORMAT_MASK);quota = rockchip_canfd_get_rx_fifo_cnt(ndev);if (quota) {while (work_done < quota)work_done += rockchip_canfd_rx(ndev);}if (rockchip_canfd_read(rcan, CAN_TX_CHECK_FIC) & CAN_TX0_REQ)rockchip_canfd_write(rcan, CAN_CMD, CAN_TX1_REQ);rockchip_canfd_write(rcan, CAN_TX_CHECK_FIC, 0);}if (read_poll_timeout_atomic(rockchip_canfd_read, quota,!(quota & 0x3),0, 5000000, false, rcan, CAN_CMD))netdev_err(ndev, "Warning: wait tx req timeout!\n");rockchip_canfd_write(rcan, CAN_CMD, 0);can_get_echo_skb(ndev, 0);netif_wake_queue(ndev);can_led_event(ndev, CAN_LED_EVENT_TX);rcan->noack_cnt = 0;}if ((isr & RX_FINISH_INT) || (isr & RX_FIFO_OV_INT) || (isr & RX_FIFO_FULL_INT)) {if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2) {//rockchip_canfd_write(rcan, CAN_INT_MASK, 0x1);work_done = 0;quota = (rockchip_canfd_read(rcan, CAN_RXFC) &rcan->rx_fifo_mask) >>rcan->rx_fifo_shift;if (quota) {while (work_done < quota)work_done += rockchip_canfd_rx(ndev);}} else {work_done = 0;quota = (rockchip_canfd_read(rcan, CAN_RXFC) &rcan->rx_fifo_mask) >>rcan->rx_fifo_shift;if (quota) {while (work_done < quota)work_done += rockchip_canfd_rx(ndev);}}}if (isr & err_int) {/* error interrupt */if (rockchip_canfd_err(ndev, isr))netdev_err(ndev, "can't allocate buffer - clearing pending interrupts\n");}rockchip_canfd_tx_retry(ndev, isr);rockchip_canfd_write(rcan, CAN_INT, isr);return IRQ_HANDLED;
}static int rockchip_canfd_open(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);int err;/* common open */err = open_candev(ndev);if (err)return err;err = pm_runtime_get_sync(rcan->dev);if (err < 0) {netdev_err(ndev, "%s: pm_runtime_get failed(%d)\n",__func__, err);goto exit;}err = rockchip_canfd_start(ndev);if (err) {netdev_err(ndev, "could not start CAN peripheral\n");goto exit_can_start;}can_led_event(ndev, CAN_LED_EVENT_OPEN);
// if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2)
// napi_enable(&rcan->napi);netif_start_queue(ndev);netdev_dbg(ndev, "%s\n", __func__);return 0;exit_can_start:pm_runtime_put(rcan->dev);
exit:close_candev(ndev);return err;
}static int rockchip_canfd_close(struct net_device *ndev)
{struct rockchip_canfd *rcan = netdev_priv(ndev);netif_stop_queue(ndev);
// if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2)
// napi_disable(&rcan->napi);rockchip_canfd_stop(ndev);close_candev(ndev);can_led_event(ndev, CAN_LED_EVENT_STOP);pm_runtime_put(rcan->dev);cancel_delayed_work_sync(&rcan->tx_err_work);netdev_dbg(ndev, "%s\n", __func__);return 0;
}static const struct net_device_ops rockchip_canfd_netdev_ops = {.ndo_open = rockchip_canfd_open,.ndo_stop = rockchip_canfd_close,.ndo_start_xmit = rockchip_canfd_start_xmit,.ndo_change_mtu = can_change_mtu,
};/*** rockchip_canfd_suspend - Suspend method for the driver* @dev: Address of the device structure** Put the driver into low power mode.* Return: 0 on success and failure value on error*/
static int __maybe_unused rockchip_canfd_suspend(struct device *dev)
{struct net_device *ndev = dev_get_drvdata(dev);if (netif_running(ndev)) {netif_stop_queue(ndev);netif_device_detach(ndev);rockchip_canfd_stop(ndev);}return pm_runtime_force_suspend(dev);
}/*** rockchip_canfd_resume - Resume from suspend* @dev: Address of the device structure** Resume operation after suspend.* Return: 0 on success and failure value on error*/
static int __maybe_unused rockchip_canfd_resume(struct device *dev)
{struct net_device *ndev = dev_get_drvdata(dev);int ret;ret = pm_runtime_force_resume(dev);if (ret) {dev_err(dev, "pm_runtime_force_resume failed on resume\n");return ret;}if (netif_running(ndev)) {ret = rockchip_canfd_start(ndev);if (ret) {dev_err(dev, "rockchip_canfd_chip_start failed on resume\n");return ret;}netif_device_attach(ndev);netif_start_queue(ndev);}return 0;
}/*** rockchip_canfd_runtime_suspend - Runtime suspend method for the driver* @dev: Address of the device structure** Put the driver into low power mode.* Return: 0 always*/
static int __maybe_unused rockchip_canfd_runtime_suspend(struct device *dev)
{struct net_device *ndev = dev_get_drvdata(dev);struct rockchip_canfd *rcan = netdev_priv(ndev);clk_bulk_disable_unprepare(rcan->num_clks, rcan->clks);return 0;
}/*** rockchip_canfd_runtime_resume - Runtime resume from suspend* @dev: Address of the device structure** Resume operation after suspend.* Return: 0 on success and failure value on error*/
static int __maybe_unused rockchip_canfd_runtime_resume(struct device *dev)
{struct net_device *ndev = dev_get_drvdata(dev);struct rockchip_canfd *rcan = netdev_priv(ndev);int ret;ret = clk_bulk_prepare_enable(rcan->num_clks, rcan->clks);if (ret) {dev_err(dev, "Cannot enable clock.\n");return ret;}return 0;
}static const struct dev_pm_ops rockchip_canfd_dev_pm_ops = {SET_SYSTEM_SLEEP_PM_OPS(rockchip_canfd_suspend, rockchip_canfd_resume)SET_RUNTIME_PM_OPS(rockchip_canfd_runtime_suspend,rockchip_canfd_runtime_resume, NULL)
};static const struct of_device_id rockchip_canfd_of_match[] = {{.compatible = "rockchip,canfd-1.0",.data = (void *)ROCKCHIP_CANFD_MODE},{.compatible = "rockchip,can-2.0",.data = (void *)ROCKCHIP_CAN_MODE},{.compatible = "rockchip,rk3568-can-2.0",.data = (void *)ROCKCHIP_RK3568_CAN_MODE},{},
};
MODULE_DEVICE_TABLE(of, rockchip_canfd_of_match);static int rockchip_canfd_probe(struct platform_device *pdev)
{struct net_device *ndev;struct rockchip_canfd *rcan;struct resource *res;void __iomem *addr;int err, irq;irq = platform_get_irq(pdev, 0);if (irq < 0) {dev_err(&pdev->dev, "could not get a valid irq\n");return -ENODEV;}res = platform_get_resource(pdev, IORESOURCE_MEM, 0);addr = devm_ioremap_resource(&pdev->dev, res);if (IS_ERR(addr))return -EBUSY;ndev = alloc_candev(sizeof(struct rockchip_canfd), 1);if (!ndev) {dev_err(&pdev->dev, "could not allocate memory for CANFD device\n");return -ENOMEM;}rcan = netdev_priv(ndev);/* register interrupt handler */err = devm_request_irq(&pdev->dev, irq, rockchip_canfd_interrupt,0, ndev->name, ndev);if (err) {dev_err(&pdev->dev, "request_irq err: %d\n", err);return err;}rcan->reset = devm_reset_control_array_get(&pdev->dev, false, false);if (IS_ERR(rcan->reset)) {if (PTR_ERR(rcan->reset) != -EPROBE_DEFER)dev_err(&pdev->dev, "failed to get canfd reset lines\n");return PTR_ERR(rcan->reset);}rcan->num_clks = devm_clk_bulk_get_all(&pdev->dev, &rcan->clks);if (rcan->num_clks < 1)return -ENODEV;rcan->mode = (unsigned long)of_device_get_match_data(&pdev->dev);if ((cpu_is_rk3566() || cpu_is_rk3568()) && (rockchip_get_cpu_version() == 3))rcan->mode = ROCKCHIP_RK3568_CAN_MODE_V2;rcan->base = addr;rcan->can.clock.freq = clk_get_rate(rcan->clks[0].clk);rcan->dev = &pdev->dev;rcan->can.state = CAN_STATE_STOPPED;switch (rcan->mode) {case ROCKCHIP_CANFD_MODE:rcan->can.bittiming_const = &rockchip_canfd_bittiming_const;rcan->can.data_bittiming_const = &rockchip_canfd_data_bittiming_const;rcan->can.do_set_mode = rockchip_canfd_set_mode;rcan->can.do_get_berr_counter = rockchip_canfd_get_berr_counter;rcan->can.do_set_bittiming = rockchip_canfd_set_bittiming;rcan->can.do_set_data_bittiming = rockchip_canfd_set_bittiming;rcan->can.ctrlmode = CAN_CTRLMODE_FD;/* IFI CANFD can do both Bosch FD and ISO FD */rcan->can.ctrlmode_supported = CAN_CTRLMODE_LOOPBACK |CAN_CTRLMODE_FD;rcan->rx_fifo_shift = RX_FIFO_CNT0_SHIFT;rcan->rx_fifo_mask = RX_FIFO_CNT0_MASK;break;case ROCKCHIP_CAN_MODE:case ROCKCHIP_RK3568_CAN_MODE:case ROCKCHIP_RK3568_CAN_MODE_V2:rcan->can.bittiming_const = &rockchip_canfd_bittiming_const;rcan->can.do_set_mode = rockchip_canfd_set_mode;rcan->can.do_get_berr_counter = rockchip_canfd_get_berr_counter;rcan->can.ctrlmode_supported = CAN_CTRLMODE_BERR_REPORTING |CAN_CTRLMODE_LISTENONLY |CAN_CTRLMODE_LOOPBACK |CAN_CTRLMODE_3_SAMPLES;rcan->rx_fifo_shift = RX_FIFO_CNT0_SHIFT;rcan->rx_fifo_mask = RX_FIFO_CNT0_MASK;break;default:return -EINVAL;}if (rcan->mode == ROCKCHIP_CAN_MODE) {rcan->rx_fifo_shift = RX_FIFO_CNT1_SHIFT;rcan->rx_fifo_mask = RX_FIFO_CNT1_MASK;}if (device_property_read_u32_array(&pdev->dev,"rockchip,tx-invalid-info",rcan->tx_invalid, 4))rcan->txtorx = 1;if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2) {rcan->txtorx = 0;//netif_napi_add(ndev, &rcan->napi, rockchip_canfd_rx_poll, 6);}ndev->netdev_ops = &rockchip_canfd_netdev_ops;ndev->irq = irq;ndev->flags |= IFF_ECHO;rcan->can.restart_ms = 100;rcan->noack_cnt = 0;irq_set_affinity_hint(irq, get_cpu_mask(num_online_cpus() - 1));INIT_DELAYED_WORK(&rcan->tx_err_work, rockchip_canfd_tx_err_delay_work);platform_set_drvdata(pdev, ndev);SET_NETDEV_DEV(ndev, &pdev->dev);pm_runtime_enable(&pdev->dev);err = pm_runtime_get_sync(&pdev->dev);if (err < 0) {dev_err(&pdev->dev, "%s: pm_runtime_get failed(%d)\n",__func__, err);goto err_pmdisable;}err = register_candev(ndev);if (err) {dev_err(&pdev->dev, "registering %s failed (err=%d)\n",DRV_NAME, err);goto err_disableclks;}devm_can_led_init(ndev);return 0;err_disableclks:pm_runtime_put(&pdev->dev);
err_pmdisable:pm_runtime_disable(&pdev->dev);free_candev(ndev);return err;
}static int rockchip_canfd_remove(struct platform_device *pdev)
{struct net_device *ndev = platform_get_drvdata(pdev);
// struct rockchip_canfd *rcan = netdev_priv(ndev);unregister_netdev(ndev);pm_runtime_disable(&pdev->dev);
// if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2)
// netif_napi_del(&rcan->napi);free_candev(ndev);return 0;
}static struct platform_driver rockchip_canfd_driver = {.driver = {.name = DRV_NAME,.pm = &rockchip_canfd_dev_pm_ops,.of_match_table = rockchip_canfd_of_match,},.probe = rockchip_canfd_probe,.remove = rockchip_canfd_remove,
};
module_platform_driver(rockchip_canfd_driver);MODULE_AUTHOR("Elaine Zhang <zhangqing@rock-chips.com>");
MODULE_LICENSE("GPL");
MODULE_DESCRIPTION("Rockchip CANFD Drivers");
相关文章:
RK3568 CAN波特率500K接收数据导致CPU4满载
最近调试RK3568 CAN时发现,当CAN作为接收端,在快速接收数据时会导致cpu4满载。down掉can口或者断开外设时恢复正常。并且问题只是在部门CPU版本上出现。在CAN接收中断中打印log,能发现log是按照接收数据的时间打印的。 驱动(rockchip_canfd…...
AI实战 | 使用元器打造浪漫仪式小管家
浪漫仪式小管家 以前我们曾经打造过学习助手和待办助手,但这一次,我们决定创造一个与众不同的智能体,而浪漫将成为我们的主题。我们选择浪漫作为主题,是因为我们感到在之前的打造过程中缺乏了一些仪式感,无法给对方带来真正的惊喜。因此,这一次我们计划慢慢调试,将它发…...
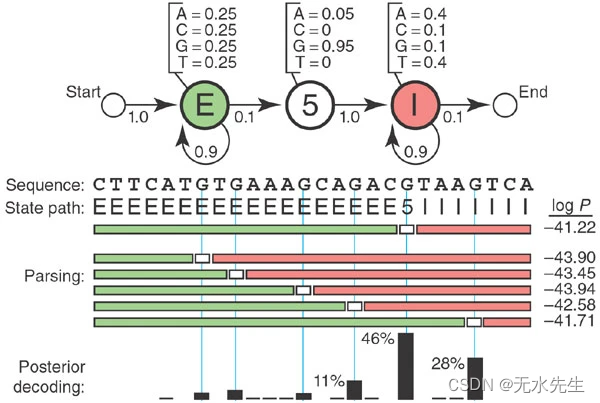
什么是隐马尔可夫模型?
文章目录 一、说明二、玩具HMM:5′拼接位点识别三、那么,隐藏了什么?四、查找最佳状态路径五、超越最佳得分对齐六、制作更逼真的模型七、收获 关键词:hidden markov model 一、说明 被称为隐马尔可夫模型的统计模型是计算生物学…...

qt中使用qsqlite连接数据库,却没有在本地文件夹中生成db文件
exe运行起来之后,发现没有在exe文件夹下生成数据库文件,,之前可以,但中间莫名其妙不行了,代码如下 // 建立和SQlite数据库的连接database QSqlDatabase::addDatabase("QSQLITE");// 设置数据库文件的名字da…...

Django的‘通用视图TemplateView’
使用通用视图的好处是:如果有一个html需要展示,不需要写view视图函数,直接写好url即可。 使用通用视图的步骤如下: 1、编辑项目urls.py文件 from django.views.generic import TemplateView 在该文件的映射表中添加:…...

java功能实现在某个时间范围之内输出true,不在某个范围输出false,时间精确到分钟
import org.slf4j.Logger; import org.slf4j.LoggerFactory; public class DateTimeChecker { private static final Logger log LoggerFactory.getLogger(DateTimeChecker.class); /** * 检查当前时间是否在指定的小时和分钟范围内。 * * param startHour 开…...
macbook屏幕录制技巧,这2个方法请你收好
在当今数字化时代,屏幕录制成为了一项不可或缺的技能,无论是教学演示、游戏直播,还是软件操作教程,屏幕录制都能帮助我们更直观地传达信息。MacBook作为苹果公司的标志性产品,其屏幕录制功能也备受用户关注。本文将详细…...

vue-loader
Vue Loader 是一个 webpack 的 loader,它允许你以一种名为单文件组件 (SFCs)的格式撰写 Vue 组件 起步 安装 npm install vue --save npm install webpack webpack-cli style-loader css-loader html-webpack-plugin vue-loader vue-template-compiler webpack…...

IO系列(十) -TCP 滑动窗口原理介绍(上)
一、摘要 之前在上分享网络编程知识文章的时候,有网友写下一条留言:“可以写写一篇关于 TCP 滑动窗口原理的文章吗?”。 当时没有立即回复,经过查询多方资料,发现这个 TCP 真的非常非常的复杂,就像一个清…...

IPython 使用技巧整理
IPython 是一个增强的 Python 交互式 shell,提供了许多实用的功能和特性,使得 Python 编程和数据科学工作变得更加便捷和高效。以下是一些 IPython 的使用技巧整理: 1. 自动补全和查询 Tab 补全:在 IPython 中,你可以…...

Python 引入中文py文件
目录 背景 思路 importlib介绍 使用方法 1.导入内置库 importlib.util 2.创建模块规格对象 spec importlib.util.spec_from_file_location("example_module", "example.py") 3.创建模块对象 module importlib.util.module_from_spec(spec) …...
qt 实现模拟实际物体带速度的移动(水平、垂直、斜角度)——————附带完整代码
文章目录 0 效果1 原理1.1 图片旋转1.2 物体按照现实中的实际距离带真实速度移动 2 完整实现2.1 将车辆按钮封装为一个类:2.2 调用方法 3 完整代码参考 0 效果 实现后的效果如下 可以显示属性(继承自QToolButton): 鼠标悬浮显示文字 按钮…...
驱动开发(三):内核层控制硬件层
驱动开发系列文章: 驱动开发(一):驱动代码的基本框架 驱动开发(二):创建字符设备驱动 驱动开发(三):内核层控制硬件层 ←本文 目录…...
企业邮箱大附件无法上传?无法确认接收状态?这样解决就行
Outlook邮箱作为最常用的邮箱系统,被全世界企业采用作为内部通用沟通方式,但Outlook邮箱却有着明显的使用缺陷,如邮箱大附件上传障碍及附件接收无提示等。 1、企业邮箱大附件无法上传 Outlook企业邮箱大附件的上传上限一般是50M,…...
)
Kotlin 数据类(Data Class)
Kotlin 数据类(Data Class)是一种特别用于持有数据的类。它们简化了数据类的创建,并提供了一些自动生成的方法。下面详细介绍 Kotlin 数据类的原理和使用方法。 数据类的定义 Kotlin 中的数据类使用 data 关键字定义。例如: da…...
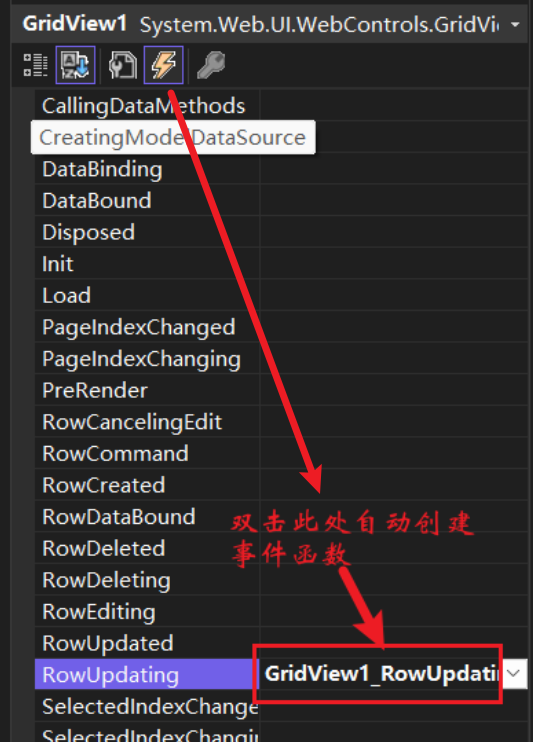
gridview自带编辑功能如何判断用户修改的值的合法性
在使用GridView的编辑功能更新值时,确保输入的值合法性是十分重要的。为了实现这一点,你可以在GridView的RowUpdating事件中加入代码来检查用户输入的值。如果发现输入的值不合法,你可以取消更新操作并向用户显示错误消息。下面是如何实现的步…...
设计模式-结构型-06-桥接模式
1、传统方式解决手机操作问题 现在对不同手机类型的不同品牌实现操作编程(比如:开机、关机、上网,打电话等),如图: UML 类图 问题分析 扩展性问题(类爆炸):如果我们再…...

安泰电压放大器的选型原则是什么
电压放大器是电子电路中常用的一种器件,主要用于放大输入电压信号。在选型电压放大器时,需要考虑以下几个原则。 根据应用需求确定放大倍数。放大倍数是指输出电压与输入电压之间的倍数关系,也称为增益。不同的应用场景对放大倍数的要求不同&…...
方法分享 |公网IP怎么指定非433端口实现https访问
公网IP可以通过指定非443端口实现HTTPS访问。在网络配置中,虽然HTTPS协议默认使用443端口,但没有规定不能在其他端口上实施HTTPS服务。使用非标准端口进行HTTPS通信需要正确配置服务器和SSL证书,并确保客户端能够连接到指定的端口。下面说明如…...
vue实现拖拽元素;vuedraggable拖拽插件
效果图: 中文文档 以下代码可直接复制使用 安装依赖 npm i -S vuedraggable使用 <template><div class"container"><div>使用flex竖轴布局 <br>handle".mover" 可拖拽的class类名 <br>filter".forbid&qu…...

终极指南:如何使用Autoclick实现Mac自动点击900次/秒
终极指南:如何使用Autoclick实现Mac自动点击900次/秒 【免费下载链接】Autoclick A simple Mac app that simulates mouse clicks 项目地址: https://gitcode.com/gh_mirrors/au/Autoclick 你是否厌倦了重复性的鼠标点击工作?无论是游戏中的重复操…...
Translumo:5分钟掌握Windows实时屏幕翻译终极指南
Translumo:5分钟掌握Windows实时屏幕翻译终极指南 【免费下载链接】Translumo Advanced real-time screen translator for games, hardcoded subtitles in videos, static text and etc. 项目地址: https://gitcode.com/gh_mirrors/tr/Translumo 你是否在玩外…...

Supabase AI Agent技能库:安全集成数据库操作与边缘函数调用
1. 项目概述:当Supabase遇上AI Agent,一个技能库的诞生最近在捣鼓AI Agent应用开发,发现一个挺有意思的现象:大家都能用LangChain、LlamaIndex这些框架快速搭出个Agent的架子,但真想让这个Agent去干点具体、有用的活儿…...

Onekey:重构Steam Depot清单下载流程的现代化解决方案
Onekey:重构Steam Depot清单下载流程的现代化解决方案 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey Onekey作为一款专为Steam Depot清单设计的自动化下载工具,通过其创…...

PowerInfer:基于热点神经元预测的LLM高性能推理引擎部署指南
1. 项目概述:当推理速度成为AI落地的瓶颈最近在折腾本地大模型推理的朋友,估计都绕不开一个核心痛点:速度。模型效果再好,生成一句话要等上十几秒,那种“卡顿感”足以劝退绝大多数想把它集成到实际应用里的开发者。我自…...

基于RAG的电影智能体构建:从向量检索到Agentic设计
1. 项目概述:一个能聊电影的智能体最近在GitHub上看到一个挺有意思的项目,叫tomasonjo/llm-movieagent。光看名字,你大概能猜到,这是一个和电影、和大型语言模型(LLM)相关的智能体。简单来说,它…...

Claw框架数据库迁移工具claw-migrate:原理、实践与团队协作指南
1. 项目概述:一个专为Claw设计的迁移工具最近在折腾一个叫Claw的开源项目,它本身是一个轻量级的Web框架,用起来挺顺手。但项目迭代过程中,难免会遇到数据库结构变更、数据迁移这类“脏活累活”。手动写SQL脚本?太原始&…...

基于Rust与Candle的AI推理引擎cria:简化大模型本地部署与优化
1. 项目概述:从“左移”到“创造”的AI推理引擎 最近在折腾AI模型本地部署和推理优化的朋友,可能都绕不开一个名字: cria 。这个由 leftmove 开源的项目,全称是“Cria: The AI Inference Engine”,直译过来就是“创…...

IE11富文本兼容——政务系统前端的深渊
IE11富文本兼容——政务系统前端的深渊 背景:为什么还有 IE11 系统要求支持 IE11。 为什么不是 Chrome? 办公电脑全是 Windows 7 IE11单位统一采购,不能随便装浏览器部分内部网站只支持 IE(ActiveX) 现状&#x…...

机械臂时间冲击最优轨迹规划【附代码】
✨ 长期致力于串联机械臂、时间-冲击最优、轨迹规划、多目标粒子群算法、非支配排序遗传算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)构建基于…...