react钩子函数用法(useCallback、useMemo)
useMemo
import { useMemo } from 'react'; function MyComponent({ a, b }) { const memoizedValue = useMemo(() => { // 进行一些昂贵的计算 return a + b; }, [a, b]); // 当 a 或 b 发生变化时,memoizedValue 将被重新计算 return <div>{memoizedValue}</div>;
}useMemo 接受两个参数:一个函数和一个依赖数组。函数返回我们想要“记住”的值,而依赖数组则告诉 React 何时需要重新计算这个值。
注意事项
1、useMemo 仅在依赖项发生变化时重新计算值。如果依赖项没有变化,即使组件重新渲染,useMemo 也会返回上一次缓存的值。
2、useMemo 缓存的是函数的返回值,而不是函数本身。因此,如果函数本身发生变化(例如,函数内部的逻辑被修改),即使依赖项没有变化,useMemo 也可能会返回新的值。但这种情况在实际开发中较少见,因为函数逻辑通常在组件外部定义且不会频繁变化。
3、在使用 useMemo 时,需要注意不要过度优化。对于一些简单的计算或不会频繁触发的计算,可能不需要使用 useMemo。因为过度使用 useMemo 可能会增加内存的消耗,并可能导致不必要的复杂性。
useCallback
useCallback 的主要作用是返回一个缓存版本的函数,只有当它的依赖项发生变化时,这个函数才会被重新创建。这意味着,如果依赖项没有改变,函数的引用将保持不变,从而避免因函数引用改变而导致的不必要的重新渲染。其背后的原理是利用闭包和 React 的调度机制来存储并在必要时重建函数。
useCallback 接受两个参数:一个是要被缓存的回调函数,另一个是该回调函数的依赖项数组。当依赖项数组中的任何一个值发生变化时,useCallback 都会返回一个新的函数实例;否则,它将返回之前缓存的函数实例。
const memoizedCallback = useCallback(() => { doSomething(a, b);
}, [a, b]);在这个例子中,memoizedCallback 是一个被缓存的函数,它仅在 a 或 b 发生变化时才会被重新创建。
使用场景
1、在传递给子组件的回调函数中,特别是当子组件使用了如 React.memo 或 shouldComponentUpdate 来避免不必要的渲染时,useCallback 可以确保传递给子组件的回调函数引用保持稳定,从而防止不必要的重新渲染。
2、在大型列表渲染或频繁状态更新的性能敏感场景中,使用 useCallback 可以帮助提升性能。
注意事项
1、与直接在组件内创建函数相比,使用 useCallback 需要付出额外的开销,因为它涉及到存储和检索函数的机制。因此,在不需要优化性能的情况下,盲目使用 useCallback 可能会导致性能下降。
2、依赖项数组应准确反映函数的所有外部依赖,以避免出现逻辑错误。未来编译器可能会更加智能,能够自动创建和管理依赖项数组。
相关文章:
)
react钩子函数用法(useCallback、useMemo)
useMemo import { useMemo } from react; function MyComponent({ a, b }) { const memoizedValue useMemo(() > { // 进行一些昂贵的计算 return a b; }, [a, b]); // 当 a 或 b 发生变化时,memoizedValue 将被重新计算 return <div>{memoizedVa…...
linux配置Vnc Server给Windows连接
1. linux 安装必要vnc server和桌面组件 sudo apt -y install tightvncserversudo apt install xfce4 xfce4-goodies2. linux 配置vncserver密码 #bash vncserver参考: https://cn.linux-console.net/?p21846#google_vignette 3. 将启动桌面命令写入.vnc/xstartup # .vnc/x…...

Android中的KeyEvent详解
介绍 在Android中,KeyEvent 是用来表示按键事件的类,可根据对应的事件来处理按键输入,具体包含了关于按键事件的信息,例如按键的代码、动作(按下或释放)以及事件的时间戳,KeyEvent 对象通常在用…...

移植案例与原理 - HDF驱动框架-驱动配置(2)
1.2.7 节点复制 节点复制可以实现在节点定义时从另一个节点先复制内容,用于定义内容相似的节点。语法如下,表示在定义"node"节点时将另一个节点"source_node"的属性复制过来。 node : source_node示例如下,编译后bar节点…...

年终奖发放没几天,提离职领导指责我不厚道,我该怎么办?
“年终奖都发了,你还跳槽?太不厚道了吧!” “拿完年终奖就走人,这不是典型的‘骑驴找马’吗?” 每到岁末年初,关于“拿到年终奖后是否应该立即辞职”的话题总会引发热议。支持者认为,这是个人…...

多处理系统结构
目录 统一内存访问(UMA)多处理器系统结构 优点 缺点 应用场景 UMA 结构的架构示例 解决方案和改进 非统一内存访问(NUMA)多处理系统结构 概述 NUMA的优点 NUMA的缺点 NUMA系统的工作原理 NUMA优化策略 结论 现代计算…...

创建进程的常用方式
自学python如何成为大佬(目录):https://blog.csdn.net/weixin_67859959/article/details/139049996?spm1001.2014.3001.5501 在Python中有多个模块可以创建进程,比较常用的有os.fork()函数、multiprocessing模块和Pool进程池。由于os.fork()函数只适用于Unix/Linu…...
李宏毅2023机器学习作业HW06解析和代码分享
ML2023Spring - HW6 相关信息: 课程主页 课程视频 Sample code HW06 视频 HW06 PDF 个人完整代码分享: GitHub | Gitee | GitCode P.S. HW06 是在 Judgeboi 上提交的,出于学习目的这里会自定义两个度量的函数,不用深究,遵循 Sugge…...

专业技能篇--算法
文章目录 前言经典算法思想总结一、贪心算法二、动态规划三、回溯算法四、分治算法 前言 这篇简单理解一些常见的算法。如果面试的时候问到相关的算法,能够应付一二。 经典算法思想总结 一、贪心算法 思想:贪心算法是一种在每一步选择中都采取在当前状…...

Vue中CSS动态样式绑定
Vue中CSS动态样式绑定与注意事项_vue css动态绑定-CSDN博客 在 Vue 中,你不能直接在 CSS 中直接绑定 data 中的数据,因为 CSS 不是响应式的。但是,有几种方法可以实现根据 Vue 实例中的数据来动态地改变样式: 内联样式绑定&…...

【漏洞复现】契约锁电子签章平台 add 远程命令执行漏洞(XVE-2023-23720)
0x01 产品简介 契约锁电子签章平台是上海亘岩网络科技有限公司推出的一套数字签章解决方案。契约锁为中大型组织提供“数字身份、电子签章、印章管控以及数据存证服务”于一体的数字可信基础解决方案,可无缝集成各类系统,让其具有电子化签署的能力,实现组织全程数字化办公。通…...

计算机专业是否仍是“万金油”?
身份角度一:一名曾经的计算机专业学生 随着高考的结束,我站在了人生的分岔路口,面临着大学专业的选择。在众多的选择中,计算机专业一直是我深思熟虑后的一个重要选项。然而,我并不清楚自己是否真的适合这个专业&…...

Spring 启动顺序
在 Spring 框架中,应用启动过程涉及多个步骤和组件的初始化。理解 Spring 启动顺序不仅有助于优化应用性能,还能帮助开发人员排查启动过程中可能出现的问题。本文将详细介绍 Spring 启动过程中的关键步骤和顺序。 1. Spring 启动过程概述 Spring 应用的…...

2024.06.19 刷题日记
41. 缺失的第一个正数 这个题目的通过率很低,是一道难题,类似于脑筋急转弯,确实不好想。实际上,对于一个长度为 N 的数组,其中没有出现的最小正整数只能在 [1,N1] 中。 这个结论并不好想,举个例子&#x…...

linux系统中,pwd获取当前路径,dirname获取上一层路径;不使用 ../获取上一层路径
在实际项目中,我们通常可以使用 pwd 来获取当前路径,但是如果需要获取上一层路径,有不想使用 …/ 的方式,可以尝试使用 dirname指令 测试shell脚本 #!/bin/bash# 获取当前路径 CURRENT_PATH$PWD echo "CURRENT_PATH$CURREN…...
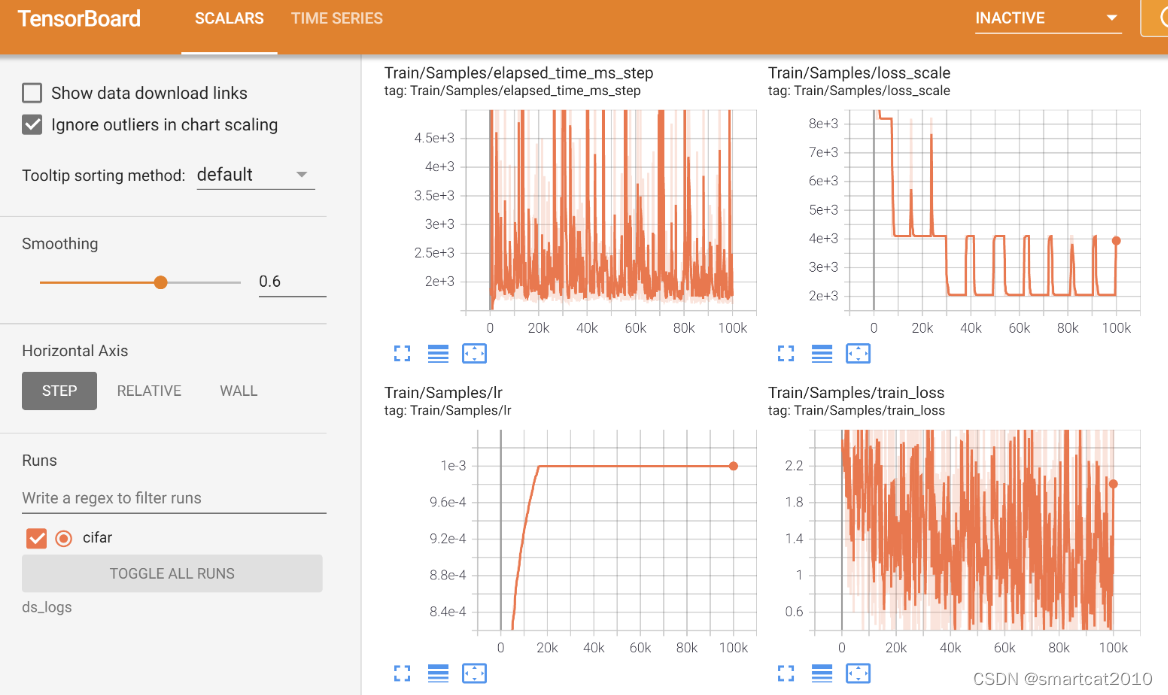
DeepSpeed Monitoring Comm. Logging
Monitoring 支持多种后端:Tensorboard、WandB、Comet、CSV文件; TensorBoard例子: 自动监控:DeepSpeed自动把重要metric记录下来。只需在配置文件里enable相应的看板后端即可: {"tensorboard": {"enabl…...
关于INCA的几个实用功能
01--VUI窗口设计 这个可以按照自己的想法设计INCA观测或标定窗口 首先进入到INCA的环境内,点击实验→加载VUI窗口 选择空的窗口 打开后如下所示: 点击UI开发模式,如下图 如下: 添加标定量、观测量、示波器 窗口的大小需要在开发…...

Mamaba3--RNN、状态方程、勒让德多项式
Mamaba3–RNN、状态方程、勒让德多项式 一、简单回顾 在Mamba1和Mamba2中分别介绍了RNN和状态方程。 下面从两个图和两个公式出发,对RNN和状态方程做简单的回顾: R N N : s t W s t − 1 U x t ; O t V s t RNN: s_t Ws_{t-1}Ux_t&…...
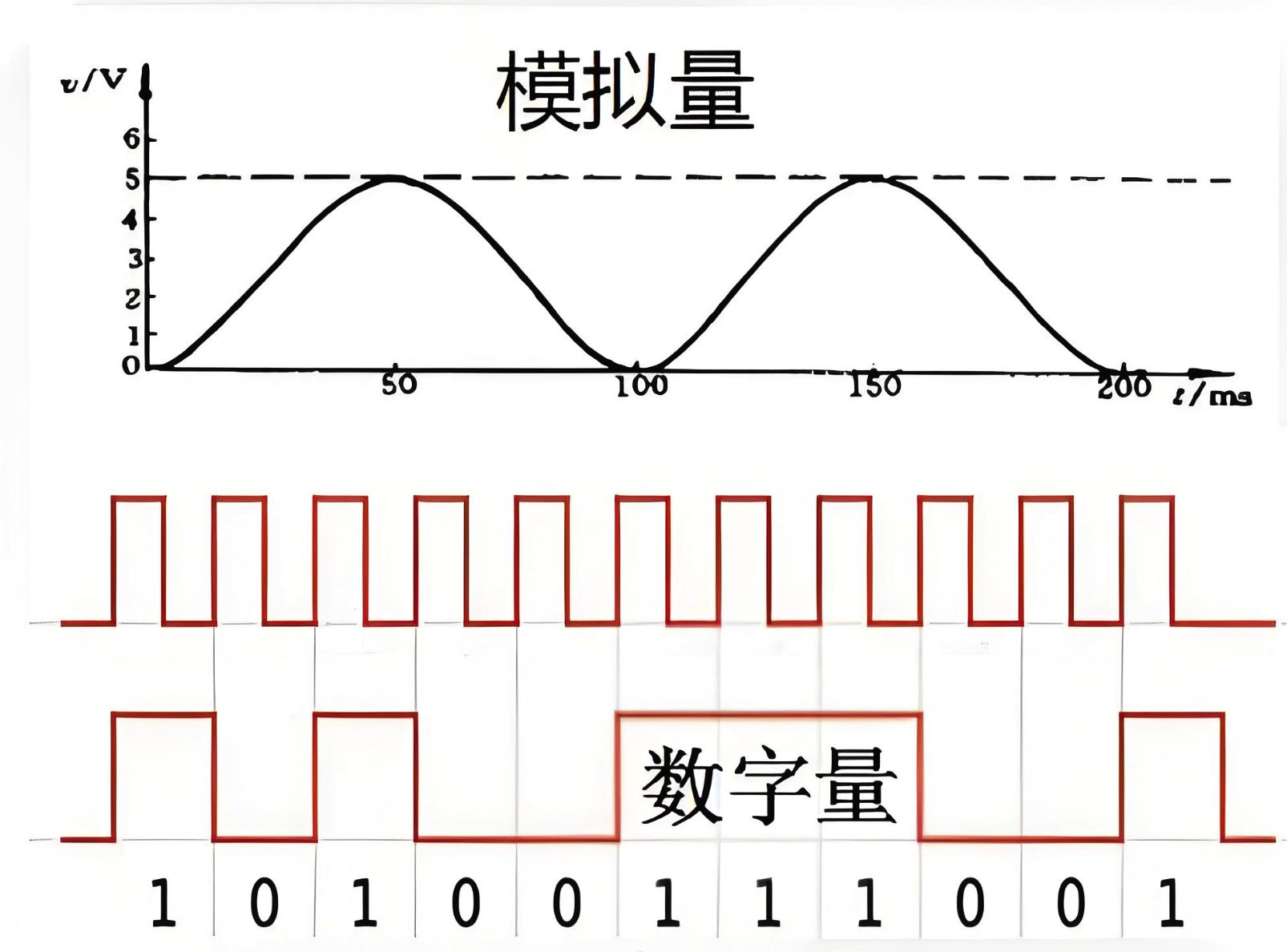
PLC模拟量和数字量到底有什么区别?
PLC模拟量和数字量的区别 在工业自动化领域,可编程逻辑控制器(PLC)是控制各种机械设备和生产过程的核心组件。PLC通过处理模拟量和数字量来实现对工业过程的精确控制。了解模拟量和数字量的区别对于设计高效、可靠的自动化系统至关重要。 1. …...

html中如何写一个提示框,css画一个提示框
在HTML中,提示框通常使用<div>元素来创建,然后使用CSS进行样式化。以下是一个示例,展示如何在HTML中写一个提示框,并使用CSS来设计其外观。 HTML 首先,创建一个HTML文件,其中包含一个提示框的结构&…...

字节开源AI神器DeerFlow,4.1万星标刷屏,普通人免费就能用
文章目录这玩意儿不是ChatGPT那种"嘴炮型"选手35k星标怎么来的?字节这次把"龙虾"养明白了多智能体协作:不是一个人在战斗沙箱执行:让AI真的"动手"干活对比OpenAI:免费、本地、可控普通人怎么上手&a…...

借助aibye智能工具高效完善毕业论文任务书范文,整合7大优质平台的AI修改功能提升学术写作质量
工具名称 核心功能 生成速度 适用场景 独特优势 aibiye 论文初稿生成 20-30分钟 全学科通用 自动插入图表公式 aicheck 初稿查重 20-30分钟 急需查重场景 独创降AIGC算法 askpaper 初稿生成 20-30分钟 理工科专业 支持代码片段 秒篇 快速生成 10-15分钟 …...

Markdown Viewer浏览器扩展完全指南:从安装到高级配置
Markdown Viewer浏览器扩展完全指南:从安装到高级配置 【免费下载链接】markdown-viewer Markdown Viewer / Browser Extension 项目地址: https://gitcode.com/gh_mirrors/ma/markdown-viewer Markdown Viewer是一款功能丰富的浏览器扩展,专为提…...

先瑞达2025年年报:营收同比增长20.7% 双引擎格局成型迎高质量增长
3月26日晚间,先瑞达医疗(6669.HK)正式发布截至2025年12月31日的年度业绩报告。报告期内,公司紧扣血管介入治疗领域核心赛道,以技术创新为内核、以全球化布局为抓手、以降本增效为支撑,实现经营业绩的稳健增…...
)
DeepSeek LintCode 3867 · 范围内的数字计数 public int digitsCount(int d, int low, int high)
LintCode 3867 范围内的数字计数 问题分析 计算在区间 [low, high] 中,数字 d 出现的次数。 核心思想:使用数位DP或前缀和思想 • count(low, high) count(0, high) - count(0, low-1) 方法一:逐位统计法(推荐)AC pu…...

MVC / MVVM 和 Vue3、React18 到底啥关系?
MVC / MVVM 和 Vue3、React18 到底啥关系? 我用最直白、最贴合你日常写代码的方式讲清楚,保证你瞬间通透。一、先给结论(最重要) Vue3 标准的 MVVM 框架(官方自己定义的)React18 借鉴 MVVM 思想ÿ…...

OBS高级计时器:提升直播专业度的时间管理工具
OBS高级计时器:提升直播专业度的时间管理工具 【免费下载链接】obs-advanced-timer 项目地址: https://gitcode.com/gh_mirrors/ob/obs-advanced-timer 在直播行业竞争日益激烈的今天,精准的时间控制是提升直播质量的关键因素之一。OBS高级计时器…...

OpenClaw快速体验:30分钟玩转Qwen3.5-9B基础自动化
OpenClaw快速体验:30分钟玩转Qwen3.5-9B基础自动化 1. 为什么选择OpenClawQwen3.5组合? 去年冬天第一次接触OpenClaw时,我正被重复性的文件整理工作困扰。作为技术博主,每天需要从十几个渠道收集行业动态,手动归类到…...
)
FPGA设计避坑指南:手把手教你搞定跨时钟域信号同步(附Verilog代码)
FPGA设计避坑指南:跨时钟域信号同步的工程实践与Verilog实现 在FPGA开发中,跨时钟域信号同步问题就像电路设计中的"暗礁",稍有不慎就会导致整个系统崩溃。想象一下这样的场景:你的设计在仿真阶段完美运行,但…...

体验开发新范式:如何用快马平台的AI大模型将想法直接变成代码
最近尝试用AI辅助开发工具来快速实现一个任务管理应用,整个过程让我对现代开发方式有了全新认识。和大家分享一下这个有趣的实践经历: 需求分析阶段 传统开发需要先梳理功能清单,但这次我直接把自然语言描述输入到InsCode(快马)平台的AI对话框…...