PyTorch -- RNN 快速实践
-
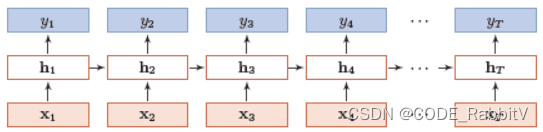
RNN Layer
torch.nn.RNN(input_size,hidden_size,num_layers,batch_first)input_size: 输入的编码维度hidden_size: 隐含层的维数num_layers: 隐含层的层数batch_first:·True指定输入的参数顺序为:- x:[batch, seq_len, input_size]
- h0:[batch, num_layers, hidden_size]
-
RNN 的输入:
- x:[seq_len, batch, input_size]
seq_len: 输入的序列长度batch: batch size 批大小
- h0:[num_layers, batch, hidden_size]
- x:[seq_len, batch, input_size]
-
RNN 的输出:
- y: [seq_len, batch, hidden_size]
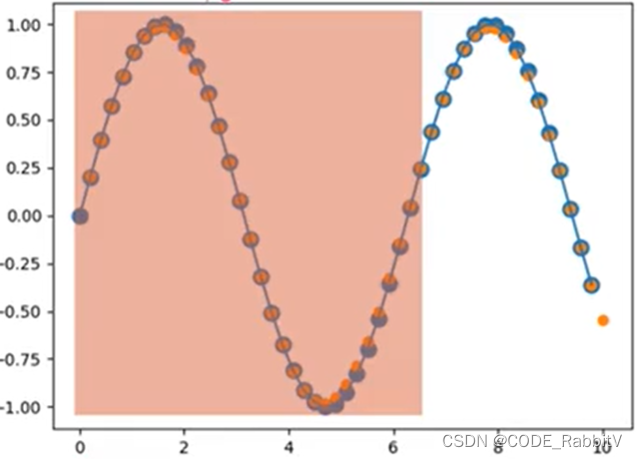
- 实战之预测
正弦曲线:以下会以此为例,演示RNN预测任务的部署
-
步骤一:确定 RNN Layer 相关参数值并基于此创建
Netimport numpy as np from matplotlib import pyplot as pltimport torch import torch.nn as nn import torch.optim as optimseq_len = 50 batch = 1 num_time_steps = seq_leninput_size = 1 output_size = input_size hidden_size = 10 num_layers = 1 batch_first = True class Net(nn.Module): ## model 定义def __init__(self):super(Net, self).__init__()self.rnn = nn.RNN(input_size=input_size,hidden_size=hidden_size,num_layers=num_layers,batch_first=batch_first)# for p in self.rnn.parameters():# nn.init.normal_(p, mean=0.0, std=0.001)self.linear = nn.Linear(hidden_size, output_size)def forward(self, x, hidden_prev):out, hidden_prev = self.rnn(x, hidden_prev)# out: [batch, seq_len, hidden_size]out = out.view(-1, hidden_size) # [batch*seq_len, hidden_size]out = self.linear(out) # [batch*seq_len, output_size]out = out.unsqueeze(dim=0) # [1, batch*seq_len, output_size]return out, hidden_prev -
步骤二:确定 训练流程
lr=0.01def tarin_RNN():model = Net()print('model:\n',model)criterion = nn.MSELoss()optimizer = optim.Adam(model.parameters(), lr)hidden_prev = torch.zeros(num_layers, batch, hidden_size) #初始化hl = []for iter in range(100): # 训练100次start = np.random.randint(10, size=1)[0] ## 序列起点time_steps = np.linspace(start, start+10, num_time_steps) ## 序列data = np.sin(time_steps).reshape(num_time_steps, 1) ## 序列数据x = torch.tensor(data[:-1]).float().view(batch, seq_len-1, input_size)y = torch.tensor(data[1: ]).float().view(batch, seq_len-1, input_size) # 目标为预测一个新的点output, hidden_prev = model(x, hidden_prev)hidden_prev = hidden_prev.detach() ## 最后一层隐藏层的状态要 detachloss = criterion(output, y)model.zero_grad()loss.backward()optimizer.step()if iter % 100 == 0:print("Iteration: {} loss {}".format(iter, loss.item()))l.append(loss.item())#############################绘制损失函数#################################plt.plot(l,'r')plt.xlabel('训练次数')plt.ylabel('loss')plt.title('RNN LOSS')plt.savefig('RNN_LOSS.png')return hidden_prev,modelhidden_prev,model = tarin_RNN() -
步骤三:测试训练结果
start = np.random.randint(3, size=1)[0] ## 序列起点 time_steps = np.linspace(start, start+10, num_time_steps) ## 序列 data = np.sin(time_steps).reshape(num_time_steps, 1) ## 序列数据 x = torch.tensor(data[:-1]).float().view(batch, seq_len-1, input_size) y = torch.tensor(data[1: ]).float().view(batch, seq_len-1, input_size) # 目标为预测一个新的点 predictions = [] ## 预测结果 input = x[:,0,:] for _ in range(x.shape[1]):input = input.view(1, 1, 1)pred, hidden_prev = model(input, hidden_prev)input = pred ## 循环获得每个input点输入网络predictions.append(pred.detach().numpy()[0]) x= x.data.numpy() y = y.data.numpy( ) plt.scatter(time_steps[:-1], x.squeeze(), s=90) plt.plot(time_steps[:-1], x.squeeze()) plt.scatter(time_steps[1:],predictions) ## 黄色为预测 plt.show()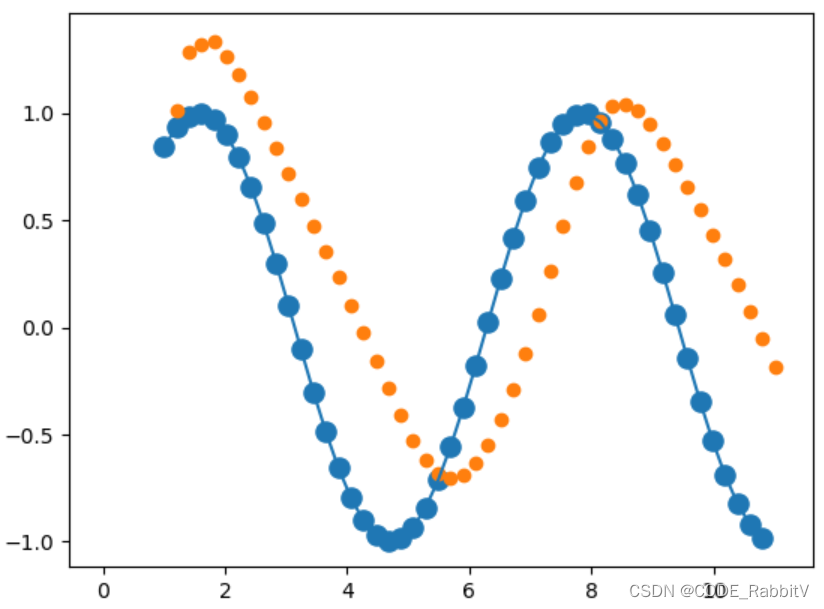
-
【高阶】上述例子比较简单,便于入门以推理到自己的目标任务,实际 RNN (长时间序列) 训练可能更有难度,可以添加
- 对于梯度爆炸的解决:
for p in model.parameters()"print(p.grad.norm()) ## 查阅梯度,看看是否爆炸torch.nn.utils.clip_grad_norm_(p, 10) ## grad 限幅,其中的 norm 后面的_ 表示 in place 操作 - 对于梯度消失的解决:->
LSTM
- 另一个很好的实例关于飞行轨迹预测- - RNN-博客链接,可供学习参考
- B站视频参考资料
相关文章:
PyTorch -- RNN 快速实践
RNN Layer torch.nn.RNN(input_size,hidden_size,num_layers,batch_first) input_size: 输入的编码维度hidden_size: 隐含层的维数num_layers: 隐含层的层数batch_first: True 指定输入的参数顺序为: x:[batch, seq_len, input_size]h0:[batc…...

SpringBoot 快速入门(保姆级详细教程)
目录 一、Springboot简介 二、SpringBoot 优点: 三、快速入门 1、新建工程 方式2:使用Spring Initializr创建项目 写在前面: SpringBoot 是 Spring家族中的一个全新框架,用来简化spring程序的创建和开发过程。SpringBoot化繁…...

【第18章】Vue实战篇之登录界面
文章目录 前言一、数据绑定1. 数据绑定2. 数据清空 二、表单校验1. 代码2. 展示 三、登录1.登录按钮2.user.js3. login 四、展示总结 前言 上一章完成用户注册,这一章主要做用户登录。 一、数据绑定 登录和注册使用相同的数据绑定 1. 数据绑定 <!-- 登录表单 -…...
[C++]使用C++部署yolov10目标检测的tensorrt模型支持图片视频推理windows测试通过
【测试通过环境】 vs2019 cmake3.24.3 cuda11.7.1cudnn8.8.0 tensorrt8.6.1.6 opencv4.8.0 【部署步骤】 获取pt模型:https://github.com/THU-MIG/yolov10训练自己的模型或者直接使用yolov10官方预训练模型 下载源码:https://github.com/laugh12321/yol…...
分享uniapp + Springboot3+vue3小程序项目实战
分享uniapp Springboot3vue3小程序项目实战 经过10天敲代码,终于从零到项目测试完成,一个前后端分离的小程序实战项目学习完毕 时间从6月12日 到6月22日,具有程序开发基础,第一次写uniapp,Springboot以前用过,VUE3也…...
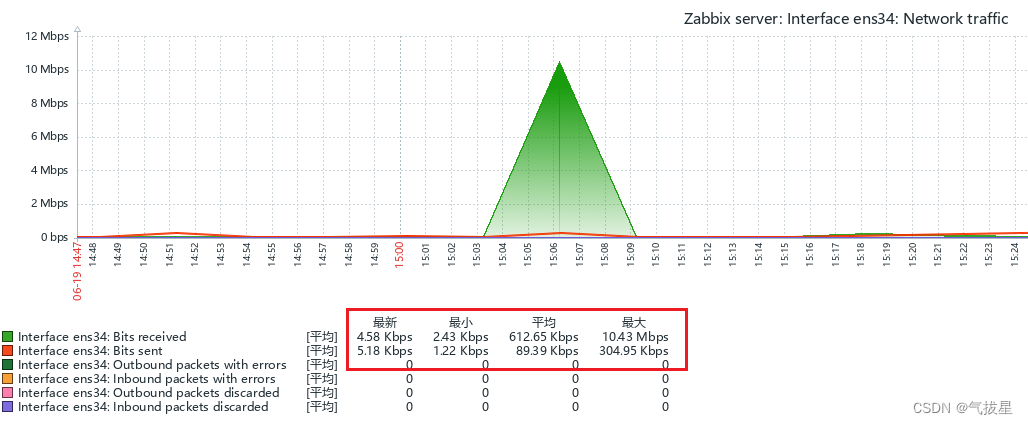
Ubuntu 24.04安装zabbix7.0.0图形中文乱码
当zabbix安装完成后,设置中文界面时,打开图形,中文内容会显示方框乱码,是因为服务器字体中没有相关的中文字体,需要更换。 1、找到中文字体,可以在网络上下载《得意黑》开源字体,也可以在windo…...

MybatisPlus 调用 原生SQL
方式一 DemoMapper.java Mapper public interface DemoMapper extends BaseMapper<TableConfig> {Update("${sql}")int createTable(Param("sql") String sql); }测试代码 SpringBootTest class DemoMapperTest {Resourceprivate DemoMapper demo…...
1.SG90
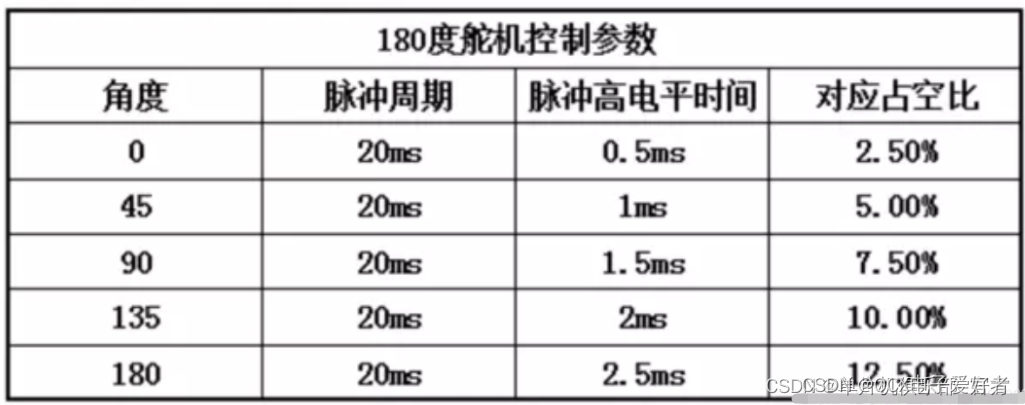
目录 一.实物图 二.原理图 三.简介 四.工作原理 一.实物图 二.原理图 三.简介 舵机(英文叫Servo),是伺服电机的一种,伺服电机就是带有反馈环节的电机,这种电机可以进行精确的位置控制或者输出较高的扭矩。舵机…...
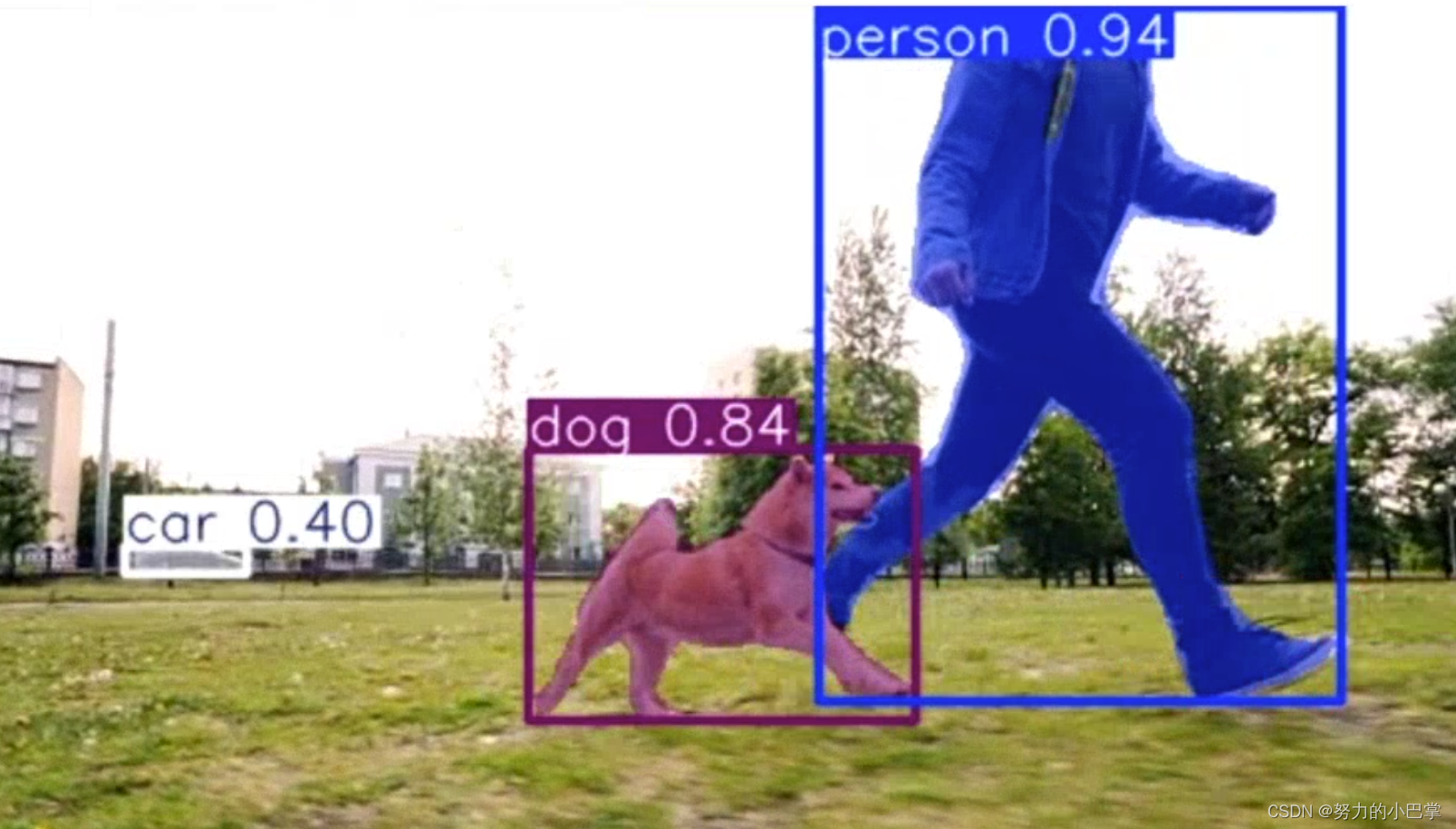
【yolov8语义分割】跑通:下载yolov8+预测图片+预测视频
1、下载yolov8到autodl上 git clone https://github.com/ultralytics/ultralytics 下载到Yolov8文件夹下面 另外:现在yolov8支持像包一样导入,pip install就可以 2、yolov8 语义分割文档 看官方文档:主页 -Ultralytics YOLO 文档 还能切…...

基于STM8系列单片机驱动74HC595驱动两个3位一体的数码管
1)单片机/ARM硬件设计小知识,分享给将要学习或者正在学习单片机/ARM开发的同学。 2)内容属于原创,若转载,请说明出处。 3)提供相关问题有偿答疑和支持。 为了节省单片机MCU的IO口资源驱动6个数码管&…...

Jlink下载固件到RAM区
Jlink下载固件到RAM区 准备批处理搜索exe批处理读取bin数据解析调用jlink批处理准备jlink脚本 调用执行 环境:J-Flash V7.96g 平台:arm cortex-m3 准备批处理 搜索exe批处理 find_file.bat echo off:: 自动识别脚本名和路径 set "SCRIPT_DIR%~dp…...

Kotlin基础——Typeclass
高阶类型 如在Iterable新增泛型方法时 interface Iterable<T> {fun filter(p: (T) -> Boolean): Iterable<T>fun remove(p: (T) -> Boolean): Iterable<T> filter { x -> !p(x) } }对应的List、Set实现上述方法时仍需要返回具体的类型 interfac…...

DC-DC 高压降压、非隔离AC-DC、提供强大的动力,选择优质电源芯片-(昱灿)
畅享长续航,尽在我们的充电芯片! 无论是手机、平板还是智能设备,长时间使用后电量不足总是令人头疼。然而,我们的充电芯片将为您带来全新的充电体验!采用先进的技术,我们的充电芯片能够提供快速而稳定的充电…...

GPT-4o的视觉识别能力,将绕过所有登陆的图形验证码
知识星球🔗除了包含技术干货:《Java代码审计》《Web安全》《应急响应》《护网资料库》《网安面试指南》还包含了安全中常见的售前护网案例、售前方案、ppt等,同时也有面向学生的网络安全面试、护网面试等。 我们来看一下市面上常见的图形验证…...

【LinuxC语言】进程间的通信——管道
文章目录 前言不同进程间通信的方式管道匿名管道和命名管道半双工与全双工管道相关函数创建管道总结前言 在Linux操作系统中,进程是执行中的程序的实例。每个进程都有自己的地址空间,数据栈以及其他用于跟踪进程执行的辅助数据。操作系统管理这些进程,并通过调度算法来分享…...
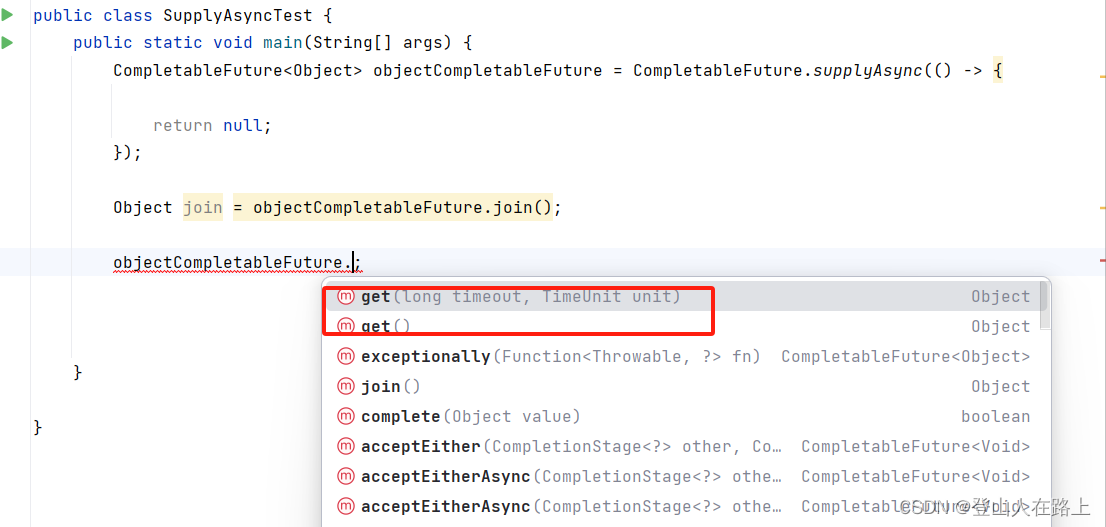
CompletableFuture 基本用法
一、 CompletableFuture简介 CompletableFuture 是 Java 8 引入的一个功能强大的类,用于异步编程和并发处理。它提供了丰富的 API 来处理异步任务的结果,支持函数式编程风格,并允许通过链式调用组合多个异步操作。 二、CompletableFuture中…...

网页如何发布到服务器上
将网页发布到服务器上的过程涉及多个步骤,包括准备阶段、选择托管提供商、发布网站等。12 准备阶段: 确保在本地开发环境中对网站进行了充分的测试,包括功能测试、性能测试和安全测试。 检查Web.config文件,确保所有的配置设置…...

Jenkins简要说明
Jenkins 是一个开源的持续集成和持续部署(CI/CD)工具,广泛用于自动化软件开发过程中的构建、测试和部署等任务。它是基于Java开发的,因此可以在任何支持Java的平台上运行,并且能够与各种操作系统、开发工具和插件无缝集…...

C# 比较基础知识:最佳实践和技巧
以下是一些在 C# 中进行比较的技巧和窍门的概述。 1. 比较原始类型 对于原始类型(int、double、char 等),可以使用标准比较运算符。 int a 5; int b 10; bool isEqual (a b); // false bool isGreater (a > b); // false bool is…...

Ansible 自动化运维实践
随着 IT 基础设施的复杂性不断增加,手动运维已无法满足现代企业对高效、可靠的 IT 运维需求。Ansible 作为一款开源的自动化运维工具,通过简洁易用的 YAML 语法和无代理(agentless)架构,极大简化了系统配置管理、应用部…...

硬件笔记——立创逻辑派开关电源案例解读
立创逻辑派开发板中有上图三个BUCK电路,使用SY8113B芯片将5V电压分别降压至3.3V、1.5V、1.0V。 SY8113B 是一款同步降压型稳压 IC,它将 PWM 控制模块、高端开关管与低端开关管集成在同一芯片上,以此最大限度降低开关转换损耗与导通损耗。凭借超低导通电阻Rds (on)的…...

go语言里面实现并发安全扣减库存的几种方式
一、基本数据准备 1、数据表的创建 -- ---------------- -- 库存表 -- ---------------- DROP TABLE IF EXISTS inventory; CREATE TABLE inventory (id int NOT NULL AUTO_INCREMENT primary key COMMENT 主键id,goods_id int(11) default 1 comment 商品id,stocks int(11) de…...

WarcraftHelper终极指南:如何让魔兽争霸3在现代电脑上焕然新生 [特殊字符]
WarcraftHelper终极指南:如何让魔兽争霸3在现代电脑上焕然新生 🎮 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争…...

全球人形机器人革命浪潮涌动,特斯拉/微美全息聚焦AI具身量产应用新突破!
近日,特斯拉(TSLA.US)马斯克宣布开启人类历史上规模最大的芯片制造项目——TERAFAB,目标实现每年超过1太瓦的算力产出。该设施将整合芯片设计、光刻、制造等全流程,其生产的部分芯片未来将直接用于驱动特斯拉电动车以及人形机器人。人形机器人…...

AI识别人,是最落后的能力——真正的智能,不是“看见你是谁”,而是“知道你在哪里”
AI识别人,是最落后的能力——真正的智能,不是“看见你是谁”,而是“知道你在哪里”一、开头:行业正在集体卷错方向过去十年,AI行业一直在做一件事:👉 更准确地“识别人”我们不断看到这些突破&a…...

重磅更新!Pydantic AI 引入在线 Eval 与 MCP 控制,Agent 落地难的问题正在被解决
Agent 开发进入“深水区”:pydantic-ai v1.74.0 释放了什么信号?在 AI 应用开发的圈子里,一直存在一个尴尬的现象:写一个能跑的 Chatbot Demo 只需要一下午,但要把这个 Demo 变成稳定可靠的生产级应用,可能…...

基于 N-gram 全新模型:嵌入扩展新范式,实现轻量化 MoE 高效进化
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...

告别手动整理!Qwen3-ASR-1.7B帮你自动转写会议录音,5分钟部署即用
告别手动整理!Qwen3-ASR-1.7B帮你自动转写会议录音,5分钟部署即用 1. 语音识别的新选择 还在为会议录音转写而烦恼吗?传统的手动转写不仅耗时耗力,而且准确率难以保证。Qwen3-ASR-1.7B语音识别模型的出现,彻底改变了…...

如何利用APOC插件提升Neo4J的数据处理能力?实战配置指南
如何利用APOC插件释放Neo4J的隐藏潜能?高阶实战手册 当你已经熟练使用Cypher进行常规图数据查询时,是否遇到过这些瓶颈?需要批量处理百万级节点关系却找不到高效方法;想实现复杂图算法但原生函数库不支持;数据导入导出…...

【NOIP】1998真题解析 luogu-P1008 三连击 | GESP三、四级以上可练习
NOIP 1998 普及组真题,主要考察枚举算法与数位分离。题目要求将 这些数字进行组合,寻找符合特定比例的三位数。这是一个很经典的暴力枚举题。GESP三、四级以上可练习。题目难度⭐⭐☆☆☆,洛谷难度等级普及−。 luogu-P1008 [NOIP 1998 普…...