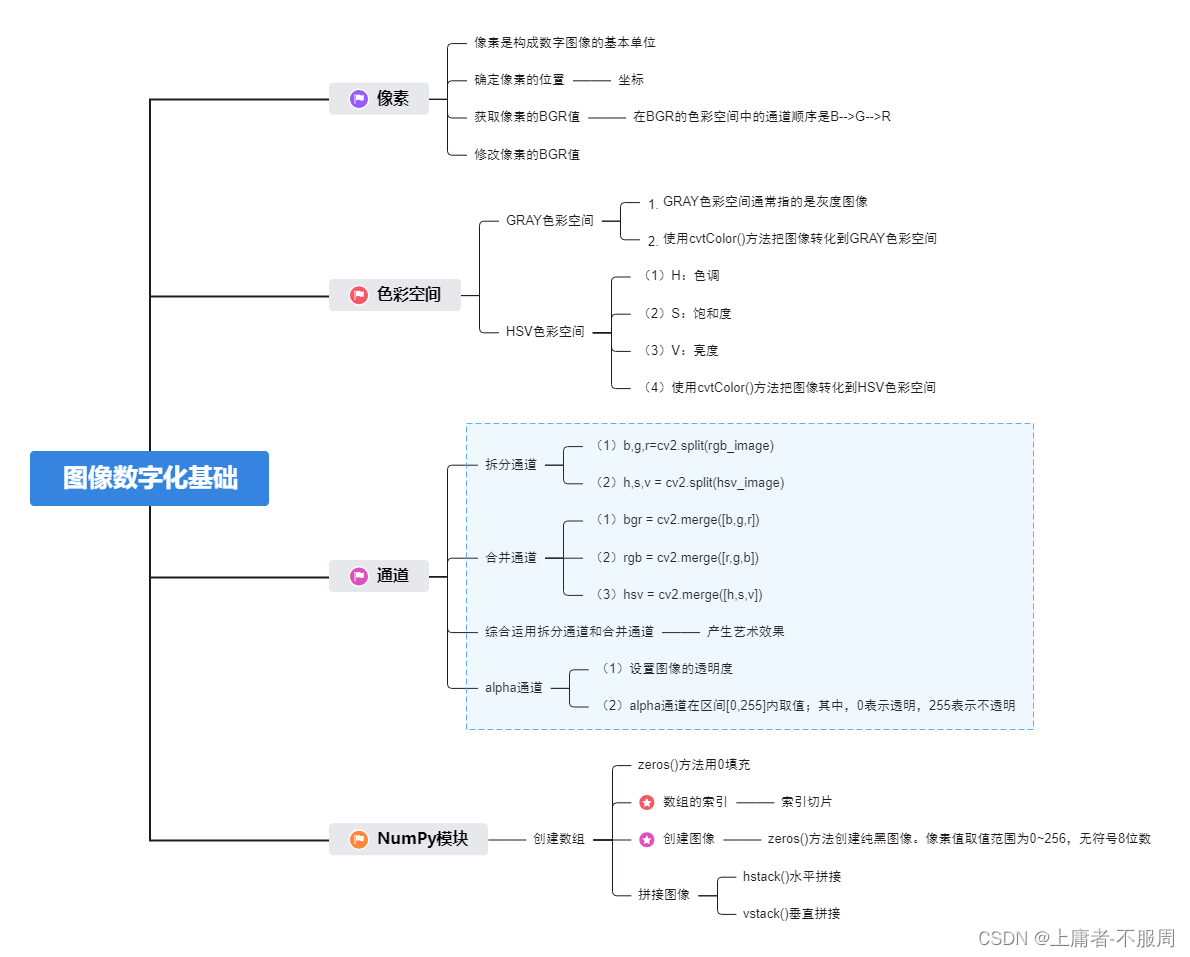
图像数字化基础
一、像素
1、获取图像指定位置的像素
import cv2
image = cv2.imread("E:\\images\\2.png")
px = image[291,218]
print("坐标(291,218)上的像素的BGR值是:",px)(1)RGB色彩空间
-
R通道:红色通道
-
G通道:绿色通道
-
B通道:蓝色通道
(2)RGB的表示
通常使用一个三维数组来表示一幅图像中某一个像素的RGB值
(3)RGB图像
RGB图像时指用RGB色彩空间显示的图像,BGR图像是指使用BGR色彩空间显示的图像;RGB色彩空间和
BGR色彩空间的区别是图像在RGB色彩空间中的通道顺序是R->G->B,在BGR的色彩空间中的通道顺序是
B->G-R
2、修改像素的BGR值
对于RGB/BGR图像,当每个像素的R、G、B这3个值相等时,就可以得到灰度图像。其中。
R=G=B=0(B=G=R=0)为纯黑色;R=G=B=255(B=G=R=255)为纯白色
import cv2image = cv2.imread("E:/images/2.png")
cv2.imshow("2",image)for i in range(241,292):for j in range(168,219):image[i,j] = [255,255,255]cv2.imshow("3",image)
cv2.waitKey()
cv2.destroyWindow()二、色彩空间
1、GRAY色彩空间
-
GRAY色彩空间通常指的是灰度图像,灰度图像是一种每个像素都是从黑到白,被处理为256个灰度级别的单
色图像。这256个灰度级别分别用区间[0,255]中的数值表示。其中“0”表示纯黑色,“255”表示纯白色,0~255之间
的数值表示不同的亮度(即色彩的深浅程度)的深灰色或浅灰色。因此,一幅灰度图像能够展示丰富的细节信息。
-
从RGB/BGR色彩空间转换到GRAY色彩空间
dst = cv2.cvtColor(src,code)dst:转换后的图像src:转换前的初始图像code:色彩空间转换码| 色彩空间转换码 | 含义 |
|---|---|
| cv2.COLOR_BGR2GRAY | 从BGR色彩空间转换到GRAY色彩空间 |
| cv2.COLOR_RGB2GRAY | 从RGB色彩空间转换到GRAY色彩空间 |
import cv2image = cv2.imread("E:/images/2.png")
cv2.imshow("2.1",image)#将图像2.png从BGR色彩空间转换到GRAY色彩空间
gray_image = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
cv2.imshow("GRAY",gray_image)
cv2.waitKey()
cv2.destroyWindow()2、HSV色彩空间
-
HSV色彩空间是基于色调、饱和度和亮度而言的。其中,色调(H)是指光的颜色。在OpenCV中,色调在区间【0,180】内取值。例如,代表红色、黄色、绿色和蓝色的色调值分别为0、30、60和120
-
从RGB/BGR色彩空间转换到HSV色彩空间
| 色彩空间转换码 | 含义 |
|---|---|
| cv2.COLOR_BGR2HSV | 从BGR色彩空间转换到HSV色彩空间 |
| cv2.COLOR_RGB2HSV | 从RGB色彩空间转换到HSV色彩空间 |
import cv2image = cv2.imread("E:/images/2.png")
cv2.imshow("2.1",image)#将图像2.png从BGR色彩空间转换到GRAY色彩空间
hsv_image = cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
cv2.imshow("HSV",hsv_image)
cv2.waitKey()
cv2.destroyWindow()三、通道
1、拆分通道
- 拆分一幅BGR图像中的通道
b,g,r = cv2.split(bgr_image)
参数说明:b:B通道图像g:G通道图像r: R通道图像bgr_image:一幅BGR图像 import cv2bgr_image = cv2.imread("E:/images/2.png")
cv2.imshow("2.1",bgr_image)b,g,r = cv2.split(bgr_image)
cv2.imshow("B",b)
cv2.imshow("G",g)
cv2.imshow("R",r)cv2.waitKey()
cv2.destroyWindow()- 拆分一幅HSV图像中的通道
h,s,v = cv2.split(hsv_image)
参数说明:h:H通道图像s:S通道图像v:V通道图像hsv_image:一幅HSV图像 import cv2bgr_image = cv2.imread("E:/images/avatar.png")
cv2.imshow("2.1",bgr_image)#把图2.1从BGR色彩空间转换到HSV色彩空间
hsv_image = cv2.cvtColor(bgr_image,cv2.COLOR_BGR2HSV)
h,s,v = cv2.split(hsv_image)
cv2.imshow("H",h)
cv2.imshow("S",s)
cv2.imshow("V",v)cv2.waitKey()
cv2.destroyWindow()2、合并通道
合并通道是拆分通道的逆操作
-
合并B、G、R通道图像
bgr = cv2.merge([b,g,r])
参数说明:bgr:按B->G->R的顺序合并通道后得到的图像r:R通道图像g:G通道图像b:B通道图像注意:合并通道的顺序不同,图像的显示效果也不同import cv2bgr_image = cv2.imread("E:/images/avatar.png")
cv2.imshow("2.1",bgr_image)b,g,r = cv2.split(bgr_image) #拆分图2.1中的通道bgr = cv2.merge([b,g,r]) #按B->G->R的顺序合并通道
cv2.imshow("BGR",bgr)rgb = cv2.merge([r,g,b]) #按R->G->B的顺序合并通道
cv2.imshow("RGB",rgb)cv2.waitKey()
cv2.destroyWindow()- 合并H、S、V通道图像
hsv = cv2.merge([h,s,v])
参数说明:hsv:合并H通道图像、S通道图像和V通道图像后得到的图像h:H通道图像s:S通道图像v:V通道图像 import cv2bgr_image = cv2.imread("E:/images/avatar.png")
cv2.imshow("avatar.png",bgr_image)
#把图像avatar.png从RGB色彩空间转换到HSV色彩空间
hsv_image = cv2.cvtColor(bgr_image,cv2.COLOR_BGR2HSV)
h,s,v = cv2.split(hsv_image) #拆分HSV图像中的通道
hsv = cv2.merge([h,s,v]) #合并拆分后的通道图像
cv2.imshow("HSV",hsv) #显示合并通道的HSV图像cv2.waitKey()
cv2.destroyWindow()3、alpha通道
BGR色彩空间包含3个通道,即B通道、G通道、R通道。OpenCV在这3个通道的基础上增加了一个A通道,即alpha通道,用于设置图像的透明度。alpha通道在区间【0,255】内取值;其中,0表示透明,255表示不透明
import cv2bgr_image = cv2.imread("E:/images/avatar.png")
cv2.imshow("2.1",bgr_image)#把图像2.1从BGR色彩空间转换到BGRA色彩空间
bgra_image = cv2.cvtColor(bgr_image,cv2.COLOR_BGR2BGRA)
cv2.imshow("BGRA",bgra_image) #显示BGRA图像
r,g,b,a = cv2.split(bgra_image)
a[:,:] = 172
bgra_172 = cv2.merge([r,g,b,a])
a[:,:] = 0
bgra_0 = cv2.merge([r,g,b,a])cv2.imshow("A = 172",bgra_172)
cv2.imshow("A = 0",bgra_0)cv2.waitKey()
cv2.destroyWindow()四、使用NumPy模块操作像素
1、NumPy概述
NumPy提供了一个高性能的数组对象,可以轻松创建一维数组、二维数组和多维数组等大量实用方法,帮助开发者轻松地进行数组计算。从而广泛的应用于数据分析、机器学习、图像处理和计算机图形学、数学任务等领域中
2、创建数组
numpy.array(object,dtype,copy,order,subok,ndmin)
参数说明:object:任何具有数组接口方法的对象dtype:数据类型copy:可选参数,布尔型,默认值为True,则object对象被复制order:元素在内存中的出现顺序subok:布尔型。如果值为True,则将传递子类ndmin:指定生成数组的最小维数 - 创建一维和二维数组
import numpy as npn1 = np.array([1,2,3]) #创建一个简单的一维数组
n2 = np.array([0.1,0.2,0.3]) #创建一个包含小数的一维数组
n3 = np.array([[1,2],[3,4]]) #创建一个简单的二维数组- 创建浮点型数组
import numpy as nplist = [1,2,3]#创建浮点型数组
n1 = np.array(list,dtype=np.float_)
print(n1)
print(n1.dtype)
print(type(n1[0]))- 创建三维数组
import numpy as nplist = [1,2,3]
nd1 = np.array(list,ndmin=3)
print(nd1)3、操作数组
- 数组加、减、乘、除
import numpy as npn1 = np.array([1,2])
n2 = np.array([3,4])print(n1 + n2)
print(n1 - n2)
print(n1 * n2)
print(n1 / n2)//输出
[4 6]
[-2 -2]
[3 8]
[0.33333333 0.5 ]- 幂运算
import numpy as npn1 = np.array([1,2])
n2 = np.array([3,4])print(n1 ** n2)//输出:[ 1 16]- 比较运算
import numpy as npn1 = np.array([1,2])
n2 = np.array([3,4])print(n1 >= n2)
print(n1 == n2)
print(n1 <= n2)
print(n1 != n2)//输出
[False False]
[False False]
[ True True]
[ True True]- 复制数组
import numpy as npn1 = np.array([1,2])
n2 = n1.copy()print(n1 == n2)
n2[0] = 9
print(n1)
print(n2)
print(n1 == n2)//输出
[ True True]
[1 2]
[9 2]
[False True]- 索引和切片
import numpy as npn1 = np.array([1,2,3])
print(n1[0])
print(n1[1])
print(n1[0:2])
print(n1[1:])
print(n1[:2])//输出
1
2
[1 2]
[2 3]
[1 2]4、创建图像
在OpenCV中,黑白图像实际是一个二维数组,彩色图像是一个三维数组。数组中每个元素就是图像对应位置的像素值。因此修改图像像素的操作实际就是修改数组的操作
注意:数组索引、像素行列、像素坐标的关系如下数组行索引 = 像素所在行数 - 1 = 像素纵坐标数组列索引 = 像素所在列数 - 1 = 像素横坐标 - 创建纯黑色图像
import cv2
import numpy as npwidth = 200
height = 100#创建指定宽度、高度、像素值都为0的图像
img = np.zeros((height,width),np.uint8) #用0填充数组
cv2.imshow("img",img)cv2.waitKey()
cv2.destroyWindow()- 创建纯白色图像
import cv2
import numpy as npwidth = 200
height = 100#创建指定宽度、高度、像素值都为1的图像
img = np.ones((height,width),np.uint8)*255 #用1填充数组,然后再乘以255
cv2.imshow("img",img)cv2.waitKey()
cv2.destroyWindow()- 在黑色图像内部绘制白色矩形
import cv2
import numpy as npwidth = 200
height = 100#创建指定宽度、高度、像素值都为0的图像
img = np.zeros((height,width),np.uint8) #用0填充数组
# 图像纵坐标为25~75、横坐标为50~100之间的区域变为白色
img[25:75,50:100] = 255
cv2.imshow("img",img)cv2.waitKey()
cv2.destroyWindow()- 创建彩色图像
import cv2
import numpy as npwidth = 200
height = 100#创建指定宽度、高度、像素值都为0的图像
img = np.zeros((height,width,3),np.uint8) #用0填充数组
blue = img.copy()
blue[:,:,0] = 255
green = img.copy()
green[:,:,1] = 255
red = img.copy()
red[:,:,2] = 255cv2.imshow("blue",blue)
cv2.imshow("green",green)
cv2.imshow("red",red)cv2.waitKey()
cv2.destroyWindow()5、图像拼接
-
水平拼接数组
array = numpy.hstack(tup)
参数说明:tup:要拼接的数组元组
返回值说明:array:将参数元组中的数组水平拼接后生成的新数组- 垂直拼接数组
array = numpy.vstack(tup)
参数说明:tup:要拼接的数组元组
返回值说明:array:将参数元组中的数组垂直拼接后生成的新数组- 拼接图像
import cv2
import numpy as npimg = cv2.imread("E:/images/avatar.png")img_h = np.hstack((img,img))
img_v = np.vstack((img,img))cv2.imshow("img_h",img_h)
cv2.imshow("img_v",img_v)cv2.waitKey()
cv2.destroyWindow()五、总结
相关文章:
图像数字化基础
一、像素 1、获取图像指定位置的像素 import cv2 image cv2.imread("E:\\images\\2.png") px image[291,218] print("坐标(291,218)上的像素的BGR值是:",px) (1)RGB色彩空间 R通道:红色通道 G通道&…...
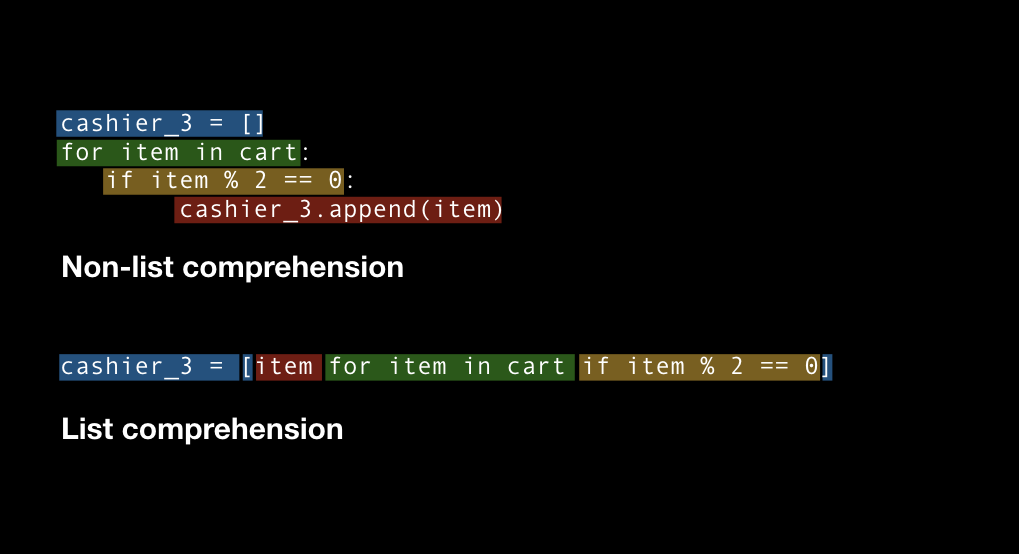
让你的Python代码更简洁:一篇文章带你了解Python列表推导式
文章目录 📖 介绍 📖🏡 演示环境 🏡📒 列表推导式 📒📝 语法📝 条件筛选📝 多重循环📝 列表推导式的优点📝 使用场景📝 示例代码🎯 示例1🎯 示例2⚓️ 相关链接 ⚓️📖 介绍 📖 在Python编程中,列表推导式是一种强大且高效的语法,它允许你用…...

基于Matlab的BP神经网络的车牌识别系统(含GUI界面)【W7】
简介: 本系统结合了图像处理技术和机器学习方法(BP神经网络),能够有效地实现车牌的自动识别。通过预处理、精确定位、字符分割和神经网络识别,系统能够准确地识别各种车牌图像,并在智能交通管理、安防监控等…...

jetpack compose的@Preview和自定义主题
1.Preview Preview可以在 Android Studio 的预览窗口中实时查看和调试 UI 组件。 基本使用 import androidx.compose.foundation.layout.fillMaxSize import androidx.compose.material.MaterialTheme import androidx.compose.material.Surface import androidx.compose.ma…...
Temu(拼多多跨境电商) API接口:获取商品详情
核心功能介绍——获取商品详情 在竞争激烈的电商市场中,快速、准确地获取商品数据详情对于电商业务的成功至关重要。此Temu接口的核心功能在于其能够实时、全面地获取平台上的商品数据详情。商家通过接入Temu接口,可以轻松获取商品的标题、价格、库存、…...
内容 2 工程项)
ArcGIS Pro SDK (五)内容 2 工程项
ArcGIS Pro SDK (五)内容 2 地图工程 目录 ArcGIS Pro SDK (五)内容 2 地图工程1 将文件夹连接项添加到当前工程2.2 获取所有工程项2.3 获取工程的所有“MapProjectItems”2.4 获取特定的“MapProjectItem”2.5 获取所有“样式工程…...

【ai】初识pytorch
初识PyTorch 大神的例子运行: 【ai】openai-quickstart 配置pycharm工程 简单例子初识一下Pytorch 好像直接点击下载比较慢? 大神的代码 在这个例子中,首先定义一个线性模型,该模型有一个输入特征和一个输出特征。然后定义一个损失函数和一个优化器,接着生成一些简单的线性…...
pcl::PointXYZRGBA造成点云无法显示
如果pcd文件没有rgba信息,使用pcl::PointXYZRGBA类型打开会提示以下信息: Failed to find match for field rgba另外,显示出来的点云是黑色,如果使用默认背景色为黑色,就无法显示点云了。 如果设置其它背景色…...
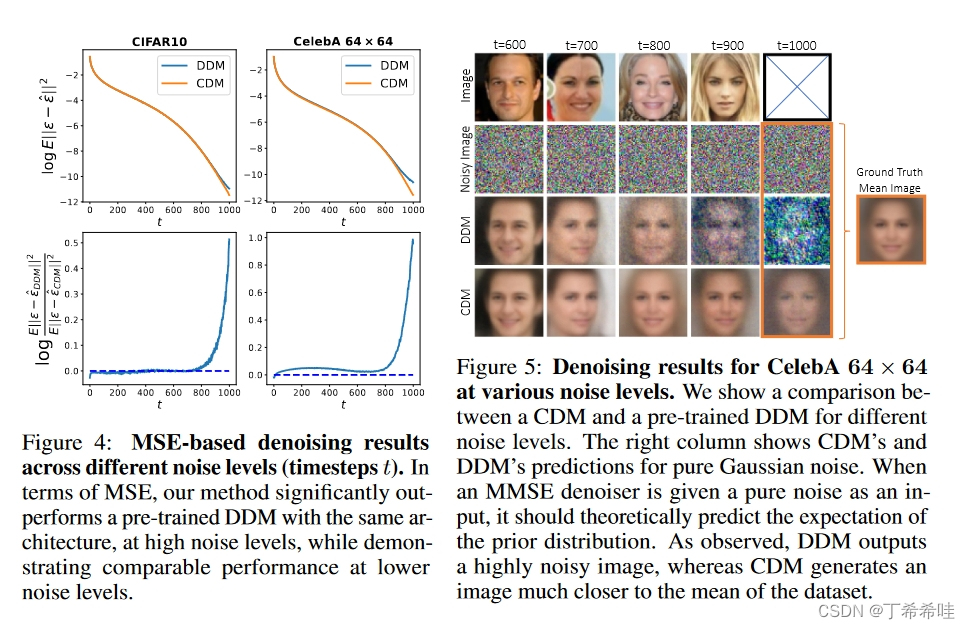
【论文精读】分类扩散模型:重振密度比估计(Revitalizing Density Ratio Estimation)
文章目录 一、文章概览(一)问题的提出(二)文章工作 二、理论背景(一)密度比估计DRE(二)去噪扩散模型 三、方法(一)推导分类和去噪之间的关系(二&a…...
kubesphere踩过的坑,持续更新....
踩过的坑 The connection to the server lb.kubesphere.local:6443 was refused - did you specify the right host… 另一篇文档中 dashboard 安装 需要在浏览器中输入thisisunsafe,即可进入登录页面 ingress 安装的问题 问题描述: 安装后通过命令 kubectl g…...
做Android开发怎么才能不被淘汰?
多学一项技能,可能就会成为你升职加薪的利器。经常混迹于各复杂业务线的人,才能跳出重复工作、不断踩坑的怪圈。而一个成熟的码农在于技术过关后,更突出其他技能对专业技术的附加值。 毋须讳言的是,35岁以后你的一线coding能力一…...
异步爬虫:aiohttp 异步请求库使用:
使用requests 请求库虽然可以完成爬虫业务,但是对于异步任务来说,它是做不到的, 这时候我们需要借助 aiohttp 异步请求库来完成异步爬虫的编写: 话不多说,直接看示例: 注意:楼主使用的python版…...

代码随想录算法训练营第四十七天|LeetCode123 买卖股票的最佳时机Ⅲ
题1: 指路:123. 买卖股票的最佳时机 III - 力扣(LeetCode) 思路与代码: 买卖股票专题中三者不同的是Ⅰ为只买卖一次,Ⅱ可多次买卖,Ⅲ最多可买卖两次。那么我们将买买卖行为分为五个状态部分(…...
将知乎专栏文章转换为 Markdown 文件保存到本地
一、参考内容 参考知乎文章代码 | 将知乎专栏文章转换为 Markdown 文件保存到本地,利用代码为GitHub:https://github.com/chenluda/zhihu-download。 二、步骤 1.首先安装包flask、flask-cors、markdownify 2. 运行app.py 3.在浏览器中打开链接&…...
【notes2】并发,IO,内存
文章目录 1.线程/协程/异步:并发对应硬件资源是cpu,线程是操作系统如何利用cpu资源的一种抽象2.并发:cpu,线程2.1 可见性:volatile2.2 原子性(读写原子):AtomicInteger/synchronized…...
Python题目
实例 3.1 兔子繁殖问题(斐波那契数列) 兔子从出生后的第三个月开始,每月都会生一对兔子,小兔子成长到第三个月后也会生一对独自。初始有一对兔子,假如兔子都不死,那么计算并输出1-n个月兔子的数量 n int…...

Hive怎么调整优化Tez引擎的查询?在Tez上优化Hive查询的指南
文章目录 在Tez上优化Hive查询的指南调优指南理解Tez中的并行化理解mapper数量理解reducer数量 并发案例1:未指定队列名称案例2:指定队列名称并发的指南/建议 容器复用和预热容器容器复用预热容器 一般Tez调优参数 在Tez上优化Hive查询的指南 在Tez上优…...
关于小程序内嵌H5页面交互的问题?
有木有遇到?有木有遇到。 小程序内嵌了H5,然后H5某个按钮,需要打开小程序某个页面进行信息完善或登记,登记后要返回H5页面,而H5页面要动态显示刚才在小程序页面登记的信息。 操作流程是这样: 方案1&#…...

Linux下手动查杀木马与Rootkit的实战指南
模拟木马程序的自动运行 黑客可以通过多种方式让木马程序自动运行,包括: 计划任务 (crontab):通过设置定时任务来周期性地执行木马脚本。开机启动:在系统的启动脚本中添加木马程序,确保系统启动时木马也随之运行。替…...
电商爬虫API的定制开发:满足个性化需求的解决方案
一、引言 随着电子商务的蓬勃发展,电商数据成为了企业决策的重要依据。然而,电商数据的获取并非易事,特别是对于拥有个性化需求的企业来说,更是面临诸多挑战。为了满足这些个性化需求,电商爬虫API的定制开发成为了解决…...
)
多语种出海必备,ElevenLabs菲律宾文语音质量实测对比:Wavenet vs. Instant Voice vs. Custom Model(附MOS评分表)
更多请点击: https://intelliparadigm.com 第一章:多语种出海语音技术演进与菲律宾语本地化挑战 随着全球数字服务加速出海,语音交互系统正从单语种向多语种、低资源语言深度拓展。菲律宾语(Filipino/Tagalog)作为东…...

AI编码工具选型指南:从原理到实践的全方位解析
1. 项目概述:为什么我们需要一份AI编码工具的“藏宝图”如果你是一名开发者,过去一年里,你的工作流可能已经被AI工具彻底重塑了。从最初用ChatGPT写几行注释,到后来用GitHub Copilot自动补全整段代码,再到如今各种能直…...

Arm Neoverse-V2/V3缓存与内存参数优化指南
1. Arm Neoverse-V2/V3集群架构概述Arm Neoverse系列处理器作为数据中心和基础设施领域的重要计算引擎,其V2/V3代架构在缓存子系统和内存管理方面进行了显著优化。作为从业多年的系统架构师,我认为理解这些处理器的参数配置对性能调优至关重要。Neoverse…...

Wedecode:全平台微信小程序源代码反编译与安全审计终极指南
Wedecode:全平台微信小程序源代码反编译与安全审计终极指南 【免费下载链接】wedecode 全自动化,微信小程序 wxapkg 包 源代码还原工具, 线上代码安全审计,支持 Windows, Macos, Linux 项目地址: https://gitcode.com/gh_mirrors/we/wedeco…...

RFM69无线通信进阶:从基础收发到可靠数据传输系统构建
1. 项目概述:从点对点收发迈向可靠通信在物联网和嵌入式开发领域,无线通信模块是连接物理世界与数字世界的桥梁。RFM69系列模块,特别是工作在433MHz或915MHz等Sub-GHz频段的RFM69HCW,因其出色的抗干扰能力、较远的传输距离以及相对…...

3D打印印章模具全攻略:从数字设计到硅胶翻模的实践指南
1. 项目概述:当3D打印遇上传统印章艺术我一直对融合数字制造与传统手工艺的项目特别着迷,最近花了不少时间折腾用3D打印模具来制作定制印章,整个过程就像在数字世界和物理世界之间架起了一座桥。简单来说,这个项目的核心思路是&am…...

5分钟终极指南:在Blender中完美导入Rhino 3dm文件的完整教程
5分钟终极指南:在Blender中完美导入Rhino 3dm文件的完整教程 【免费下载链接】import_3dm Blender importer script for Rhinoceros 3D files 项目地址: https://gitcode.com/gh_mirrors/im/import_3dm 你是否正在寻找一种简单、快速且免费的方法,…...

基于SpringBoot的公司固定资产盘点系统毕设源码
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在构建一个基于Spring Boot框架的公司固定资产盘点系统以解决传统资产管理方式中存在的效率低下问题。当前企业固定资产管理工作普遍面临数据采集繁琐、…...

学习信息系统项目管理师我们以什么视角学习?
如果你只是死记硬背那些定义,你会觉得这本书枯燥乏味,而且做题时很容易掉进陷阱。但如果你**“入戏”**,把自己当成那个掌握全局的项目经理,很多答案你凭直觉就能选对。为了帮你把“入戏”进行到底,我给你三个**“入戏…...

Linux驱动开发:原子操作实现LED设备互斥访问
1. 项目概述:用原子操作给LED驱动加把“锁”在嵌入式Linux开发里,驱动开发是绕不开的一环。很多时候,一个硬件设备,比如一个简单的LED灯,可能会被多个用户空间的应用程序同时访问。想象一下,一个APP想开灯&…...