【C++】相机标定源码笔记-线激光点云处理工具类
一个线激光点云处理工具类,它包含了一系列的方法用于处理和分析线激光扫描得到的点云数据。提供的功能包括:
通过文件或直接数据设置点云。
计算线激光在机器人坐标系下的精度,输出内点的平均距离、最大距离、最小距离、总点数和内点数。
提供了一种方法计算物体从当前位置回到地平面的变换矩阵。
能够计算线激光与垂直平面的角度,这对于确定线激光传感器的朝向非常有用。
工具类利用了pcl::sample_consensus::RANSAC算法和线模型(pcl::SampleConsensusModelLine<pcl::PointXYZ>)对线激光扫描得到的点云数据进行分析,从而完成精度测量、变换计算以及角度测定等任务。
--------------------函数-------------------
构造函数:创建一个新的点云指针,将成员变量原始点云初始化为新创建的点云。将成员变量原始点云共享给点云指针。
析构函数:空。
设置点云数据通过文件名读取点云文件:创建爱你一个点云对象,读取点云文件,将读取的点云复制到成员变量 原始点云。
设置点云数据,通过传入点云对象: 将传入的点云对象复制到成员变量。
获取点云的精度信息:计算线激光点云在机器人坐标系下的精度(通过内点索引)。输入包含高度直通滤波的参数和距离基准,最大容忍距离,输出内点的平均距离、最大距离、最小距离以及点数和内点数。创建直通滤波器,创建点云指针和滤波后点云指针,将原始点云复制到点云指针对象,设置滤波器的输入点云,设置滤波字段z,设置滤波范围,执行滤波操作得到滤波后点云。设置输入点云为滤波后点云,设置滤波字段x,设置滤波范围,执行滤波操作得到新的滤波后点云。获取滤波后点云的点数,初始化内点数、总距离、最大距离、最小距离。遍历滤波后的点云{ 获取一个点,更新最大距离(点的x坐标),更新最小距离,如果当前点的x坐标与标准距离的差值大于容差,则跳过。 累加距离,累加内点数。}。 计算平均距离,设置最大距离和最小距离。设置内点数。
获取回到地面的变换矩阵:调用外部函数,输入原始点云,z的(高度)最大最小值,x的(直径)最大最小值。最大局外点距离,得到变换矩阵。
获取墙面俯仰角(主要任务是通过拟合点云中的平面来计算墙面的俯仰角(pitch angle),并生成一个旋转矩阵 T,将拟合的平面对齐到水平面): 初始化变换矩阵为单位矩阵,一个墙面上最少有20个点。创建滤波后点云指针,遍历输入点云,去除那些接近原点的点(即 x, y, z 坐标都接近 0 的点),并将剩余的点添加到 滤波后点云 中 . 拟合平面[ 定义平面模型的系数, 创建 ModelCoefficients 和 PointIndices 指针,分别用于存储平面模型的系数和内点的索引,创建 SACSegmentation 对象 seg,用于执行随机采样一致性(RANSAC)算法来拟合平面,设置 seg 的参数(优化模型系数,模型类型为平面,使用RANSAC方法,距离阈值 ),执行分割,如果没有找到平面模型,打印错误并返回,获取平面模型系数]。 计算旋转矩阵[ 根据平面系数设置初始法向量,目标法向量设置为0,0,1; 创建旋转矩阵] ,计算俯仰角。
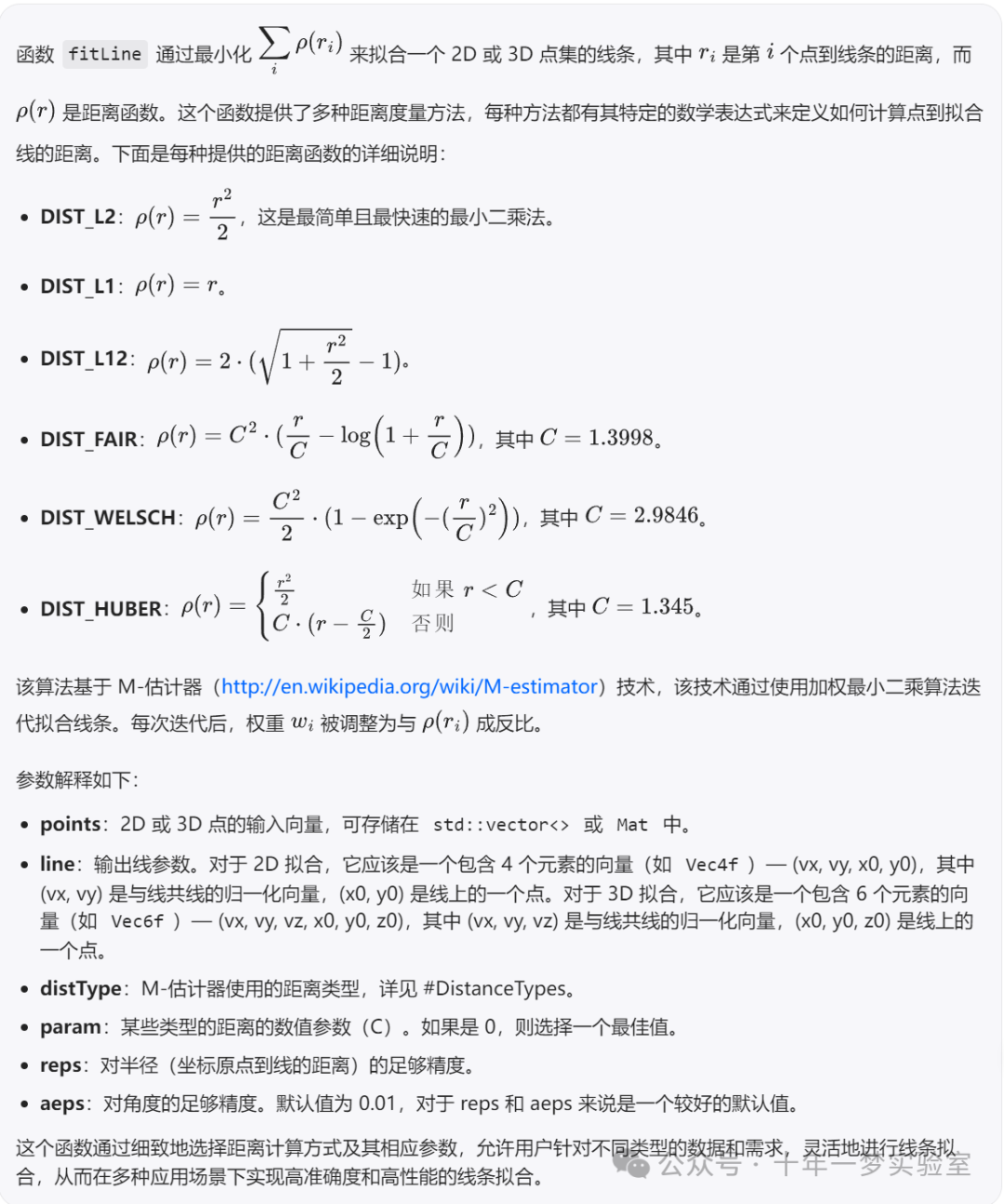
计算线激光与垂直平面角度: 创建滤波器和两个点云指针,复制输入点云到点云指针对象,滤波操作[对x轴执行滤波,保留距离正负δ范围的点,然后对z轴执行滤波,保留在最小最大z范围内的点]。检查点数并在ZOY平面上拟合直线。定义4维向量 光线参数(其中 (vx, vy) 是与线共线的归一化向量,(x0, y0) 是线上的一个点。),光线点向量,遍历滤波后点云,将点坐标(y,z) 添加到光线点向量。使用cv::fitLine为光条中心点进行直线拟合。输出光线参数。根据光线参数获取点斜式的点和斜率[如果 vy 非常小(接近于0),则认为直线与 x 轴平行,角度为0. 使用 atan2f 函数计算直线方向向量的角度,将角度从弧度转换为度数。根据角度的正负值调整角度,使其符合常规定义]。
Five Facts Lidar Companies Don't Want You To Know
https://www.youtube.com/watch?v=VuO3-TRuAP0&ab_channel=HesaiTechnology
相关文章:
【C++】相机标定源码笔记-线激光点云处理工具类
一个线激光点云处理工具类,它包含了一系列的方法用于处理和分析线激光扫描得到的点云数据。提供的功能包括: 通过文件或直接数据设置点云。计算线激光在机器人坐标系下的精度,输出内点的平均距离、最大距离、最小距离、总点数和内点数。提供了…...

解决Transformer根本缺陷,所有大模型都能获得巨大改进
即使最强大的 LLM 也难以通过 token 索引来关注句子等概念,现在有办法了。 最近两天,马斯克和 LeCun 的口水战妥妥成为大家的看点。这两位 AI 圈的名人你来我往,在推特(现为 X)上相互拆对方台。 LeCun 在宣传自家最新论…...

如何排查Java应用的死锁
排查Java应用中的死锁问题是一个复杂但重要的任务,因为死锁会导致应用程序停止响应,影响用户体验和系统稳定性。以下是一些方法和步骤,帮助你排查Java应用中的死锁。 1. 理解死锁的概念 在计算机科学中,死锁是指两个或多个线程相…...

JS面试题1
1. 延迟加载JS有哪些方式? defer: 等html全部解析完成,才会执行js代码,顺次执行js脚本 async:是和html解析同步的,不是顺次执行js脚本(当有很多个js时),是谁先加载完谁先执行。 <…...
Linux网络 - 再谈、详谈UDP和TCP协议
文章目录 前言预备netstatpidofcat /etc/services 一、UDP协议UDP协议端格式UDP的缓冲区基于UDP的应用层协议 二、TCP协议1.TCP协议段格式确认应答(ACK)机制三次握手疑问1 最后一次客户端发给服务端的ACK请求怎么保证服务端能够收到? 四次挥手疑问2 为什么挥手是四次…...
el-form重置后input无法输入问题
新增用户遇到的问题: 如果你没有为 formData 设置默认值,而只是将其初始化为空对象 {},则在打开dialog时,正常输入, formdata会变成如下 但是,打开后,直接使用 resetFields 或直接清空表单&…...
Java网络编程(JavaWeb的基础)
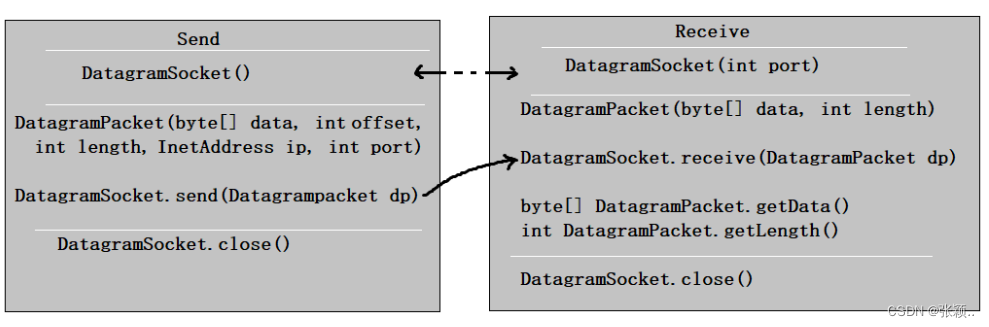
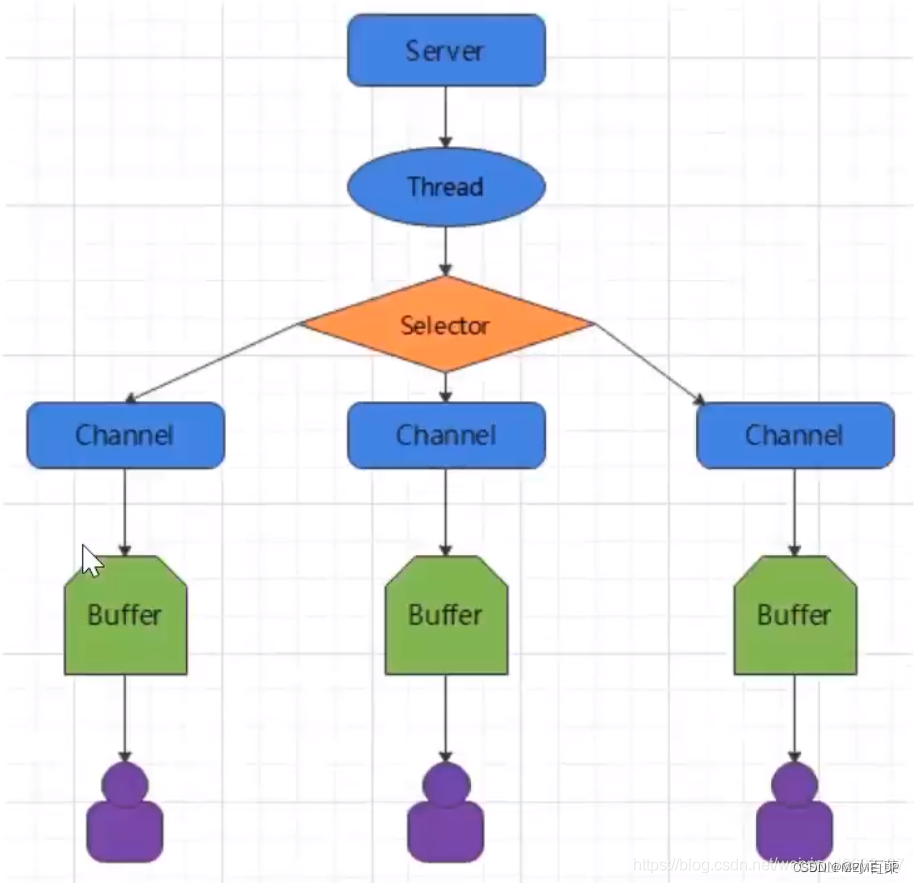
Java网络编程(JavaWeb的基础) 文章目录 Java网络编程(JavaWeb的基础)前言一、网络编程概述1.1 软件架构&网络基础1.2 网络通信要素:IP/端口/通信协议1.3 传输层协议:tcp/udp 二、网络编程API2.1 InetAddress类2.2 Socket类&am…...

鸿蒙Harmony开发实战案例:使用OpenGL绘制3D图形
XComponent控件常用于相机预览流的显示和游戏画面的绘制,在OpenHarmony上,可以配合Native Window创建OpenGL开发环境,并最终将OpenGL绘制的图形显示到XComponent控件。本文将采用"Native C"模板,调用OpenGL ES图形库绘制3D图形&…...

DM达梦数据库存储过程
💝💝💝首先,欢迎各位来到我的博客,很高兴能够在这里和您见面!希望您在这里不仅可以有所收获,同时也能感受到一份轻松欢乐的氛围,祝你生活愉快! 💝Ὁ…...

【python】OpenCV—Color Correction
文章目录 cv2.aruco 介绍imutils.perspective.four_point_transform 介绍skimage.exposure.match_histograms 介绍牛刀小试遇到的问题 参考学习来自 OpenCV基础(18)使用 OpenCV 和 Python 进行自动色彩校正 cv2.aruco 介绍 一、cv2.aruco模块概述 cv2.…...
Java基础知识整理笔记
目录 1.关于Java概念 1.1 谈谈对Java的理解? 1.2 Java的基础数据类型? 1.3 关于面向对象的设计理解 1.3.1 面向对象的特性有哪些? 1.3.2 重写和重载的区别? 1.3.3 面向对象的设计原则是什么? 1.4 关于变量与方…...
知识图谱——Neo4j数据库实战
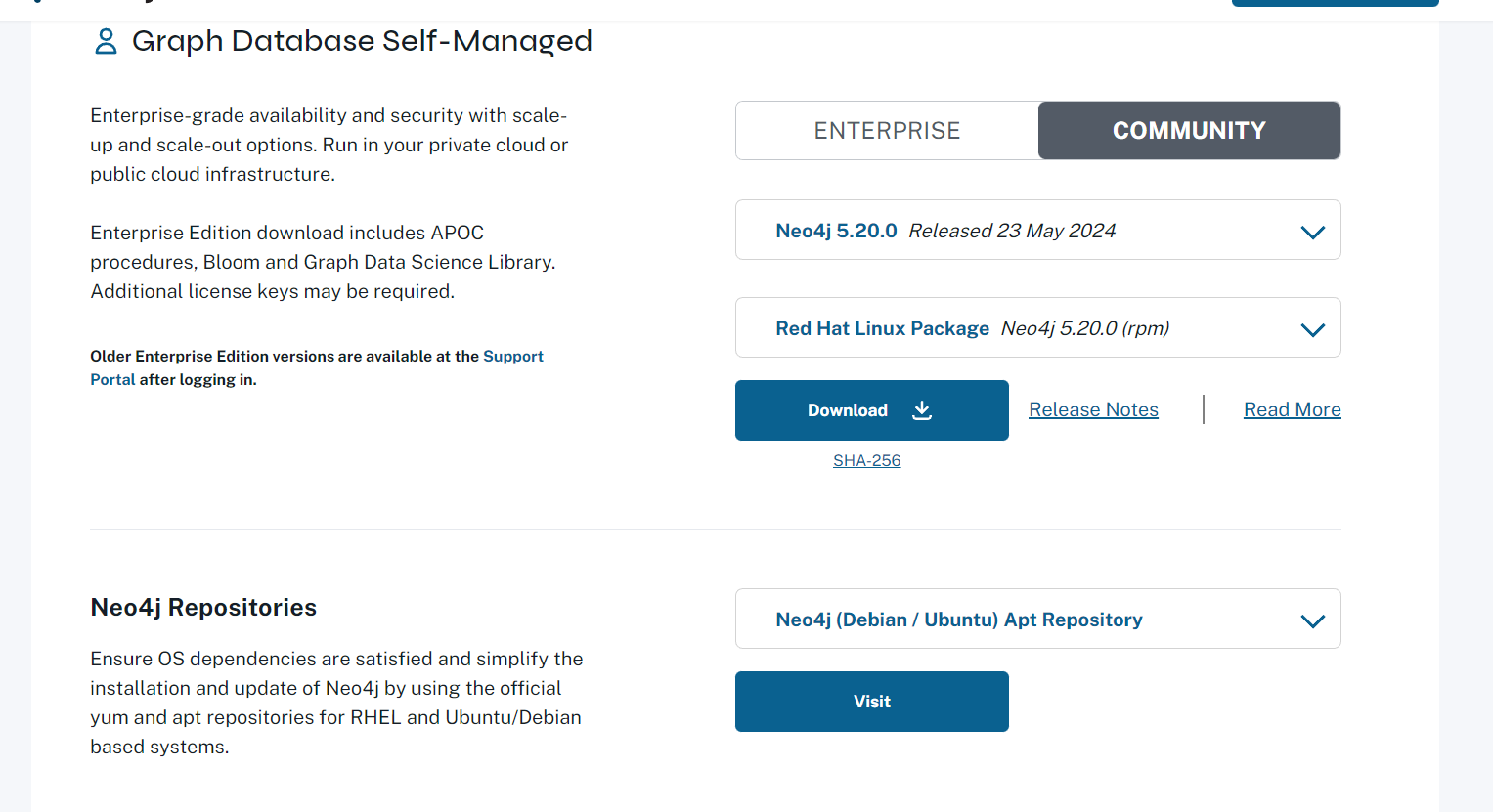
数据与代码链接见文末 1.Neo4j数据库安装 JDK 安装:https://www.oracle.com/java/technologies/javase-downloads.html Neo4j 安装:https://neo4j.com/download-center/ 配置好 JDK 和 Neo4j 的环境变量...

第十一次Javaweb作业
4.登录校验 4.1会话 --用户打开浏览器,访问web服务器的资源,会话建立,直到有一方断开连接,会话结束。在一次会话中可以包含多次请求和响应。 会话跟踪:一种维护浏览器状态的方法,服务器需要识别多次请求…...

人工智能AI风口已开:如何赋予UI设计与视频剪辑新生命
随着科技的浪潮不断向前推进,人工智能(AI)正以惊人的速度重塑着我们的世界,特别是在创意产业的核心领域——UI设计与视频剪辑中,AI正逐步成为驱动行业创新与变革的关键力量。在这个AI技术全面开花的新时代,…...

计算机专业课面试常见问题-编程语言篇
目录 1. 程序的编译执行流程? 2. C浅拷贝和深拷贝的区别? 3. C虚函数? …...
CSS|05 继承性与优先级
继承性 一、继承性的特点: 1.外层元素身上的样式会被内层元素所继承 2.如果内层元素与外层元素身上的演示相同时,外层元素的样式会被内层元素所覆盖 二、关于继承性的问题 是不是所有样式都能被继承? 答:并不是所有样式能被继承…...

KVM性能优化之内存优化(宿主机)
linux系统自带了一技术叫透明巨型页(transparent huge page),它允许所有的空余内存被用作缓存以提高性能,而且这个设置是默认开启的,我们不需要手动去操作。 Centos下,我们用cat /sys/kernel/mm/transpare…...
【Linux杂货铺】Linux学习之路:期末总结篇1
第一章 什么是Linux? Linux 是 UNIX 操作系统的一个克隆;它由林纳斯 本纳第克特 托瓦兹从零开始编写,并在网络上众多松散的黑客团队的帮助下得以发展和完善;它遵从可移植操作系统接口(POSIX)标准和单一 UNIX 规范…...

GPT-5的到来:智能飞跃与未来畅想
IT之家6月22日消息,在美国达特茅斯工程学院的采访中,OpenAI首席技术官米拉穆拉蒂确认了GPT-5的发布计划,预计将在一年半后推出。穆拉蒂形象地将GPT-4到GPT-5的飞跃比作高中生到博士生的成长。这一飞跃将给我们带来哪些变化?GPT-5的…...
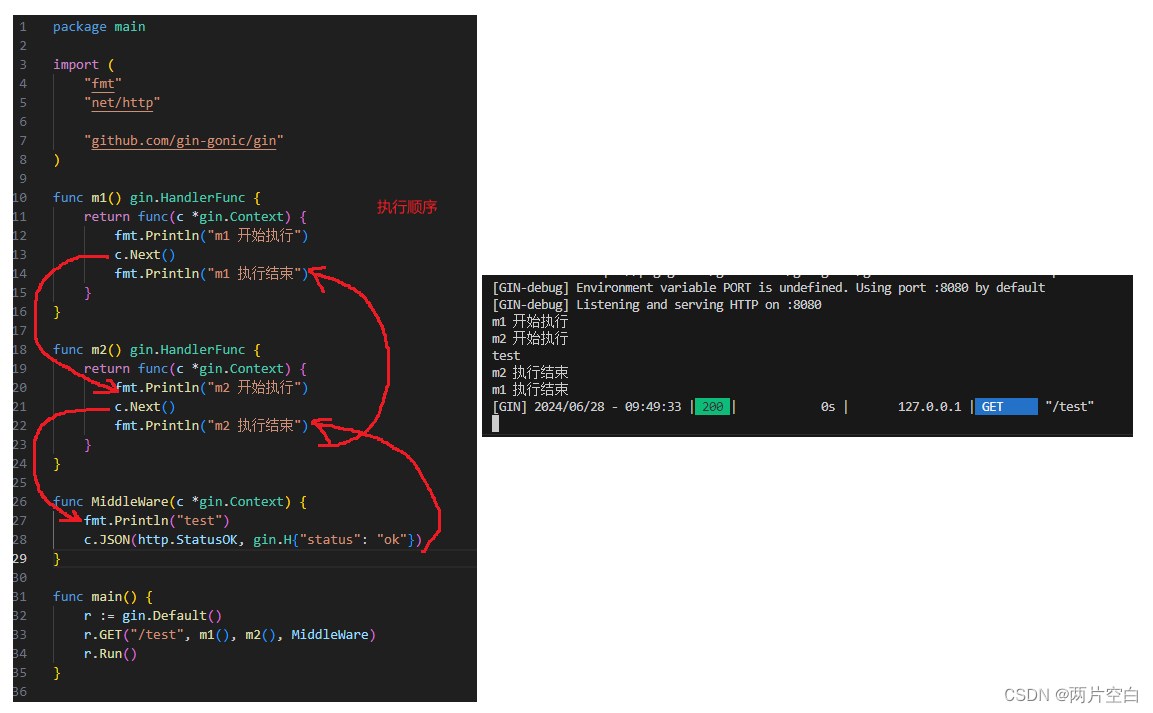
gin中间件
在web应用服务中,完整的业务处理在技术上包含客户端操作,服务端处理,返回处理结果给客户端三个步骤。但是在在更负责的业务和需求场景。一个完整的系统可能要包含鉴权认证,权限管理,安全检查,日志记录等多维…...

从数据焦虑到数字资产:WeChatExporter如何重塑你的微信记忆管理
从数据焦虑到数字资产:WeChatExporter如何重塑你的微信记忆管理 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因手机存储空间不足而不得不删除珍贵…...

2026 年 TanStack npm 供应链遭入侵:42 个包 84 版本受影响,多方面待解决问题待明确
总结2026 年 5 月 11 日 19:20 至 19:26 UTC 期间,攻击者通过结合“Pwn Request”模式的 pull_request_target、跨越分叉↔主库信任边界的 GitHub Actions 缓存投毒,以及从 GitHub Actions 运行器进程中提取 OIDC 令牌,在 42 个 tanstack/* n…...

结构函数:电子封装热分析的关键技术解析
1. 结构函数:热分析领域的核心桥梁在电子封装设计与散热方案开发中,热特性分析一直是个令人头疼的问题。想象一下,你手里拿着一块正在发烫的芯片,却无法直接"看到"热量是如何在内部传递的——这就像医生无法用X光检查病…...

5分钟快速上手:XUnity.AutoTranslator游戏翻译插件完整教程
5分钟快速上手:XUnity.AutoTranslator游戏翻译插件完整教程 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 还在为外语游戏的语言障碍而烦恼吗?XUnity.AutoTranslator是一款强大的…...

如何使用Gulf of Mexico构建虚拟世界:元宇宙开发的终极指南
如何使用Gulf of Mexico构建虚拟世界:元宇宙开发的终极指南 【免费下载链接】GulfOfMexico perfect programming language 项目地址: https://gitcode.com/GitHub_Trending/dr/GulfOfMexico Gulf of Mexico(前身为DreamBerd)是一款被称…...

从好奇号火星着陆看复杂系统工程:天空起重机方案与工程管理启示
1. 项目概述:从“不可能”到“火星新地标”的工程壮举2012年8月6日,当“好奇号”火星车在盖尔陨石坑成功着陆,传回第一张火星地表照片时,整个喷气推进实验室(JPL)控制中心沸腾了。这不仅仅是一次成功的行星…...

终极邮件营销自动化指南:工程师如何快速搭建高效邮件营销系统
终极邮件营销自动化指南:工程师如何快速搭建高效邮件营销系统 【免费下载链接】Marketing-for-Engineers A curated collection of marketing articles & tools to grow your product. 项目地址: https://gitcode.com/gh_mirrors/ma/Marketing-for-Engineers…...

从用户体验出发:手把手教你用uniapp的showLoading/showToast/showModal设计友好交互
从用户体验出发:手把手教你用uniapp的showLoading/showToast/showModal设计友好交互 在移动应用开发中,交互设计的好坏直接影响用户留存率。数据显示,超过60%的用户会因为糟糕的交互体验而卸载应用。作为开发者,我们不仅要关注功能…...

Arm DDT:高性能计算并行程序调试利器
1. Arm DDT调试工具概述Arm DDT(Distributed Debugging Tool)是Arm公司开发的一款专业级并行程序调试工具,专为高性能计算(HPC)领域设计。作为Arm Forge工具套件的重要组成部分,DDT提供了强大的MPI程序调试…...

Cortex-R52内存管理与实时性优化技术解析
1. Cortex-R52内存管理架构解析Cortex-R52作为Armv8-R架构的旗舰级实时处理器,其内存管理系统针对高可靠性场景进行了深度优化。与传统MMU不同,R52采用了增强型MPU(Memory Protection Unit)设计,通过16-24个可编程保护…...