从项目中学习Bus-Off的快慢恢复
0 前言
说到Bus-Off,大家应该都不陌生,使用VH6501干扰仪进行测试的文章在网上数不胜数,但是一般大家都是教怎么去干扰,但是说如何去看快慢恢复以及对快慢恢复做出解释比较少,因此本文以实践的视角来讲解Bus-Off的快慢恢复。
1 VH6501实现Bus-Off
首先需要知道Bus-Off的基本概念,简单来说ECU一直在往CAN总线上发送CAN报文,但不知道什么原因一直发送不出去,如果这个发送错误计数累计到255( ECU发送失败:发送错误计数 + 8, ECU发送成功:发送错误计数 - 1),ECU进入Busoff模式。ECU在Busoff期间不妨碍总线上的其它节点。一些主机厂对其系统供应商的设备提出了相应的Busoff后恢复时间需求。例如:当ECU 进入Busoff 模式后,首先,ECU 执行快恢复模式,连续n次(TBD值,不同厂商次数要求不一样)快速恢复后,ECU 进入慢恢复模式[1]。
 BUSOFF有三个状态的转换,发错一帧错误帧TEC计数器就会加8,这也是为什么我们会在VH6501中设置32帧的原因,8*32=256,刚好进入Bus-Off模式。
BUSOFF有三个状态的转换,发错一帧错误帧TEC计数器就会加8,这也是为什么我们会在VH6501中设置32帧的原因,8*32=256,刚好进入Bus-Off模式。
基本概念了解完了,使用VH6501进行干扰主要分为以下几步:
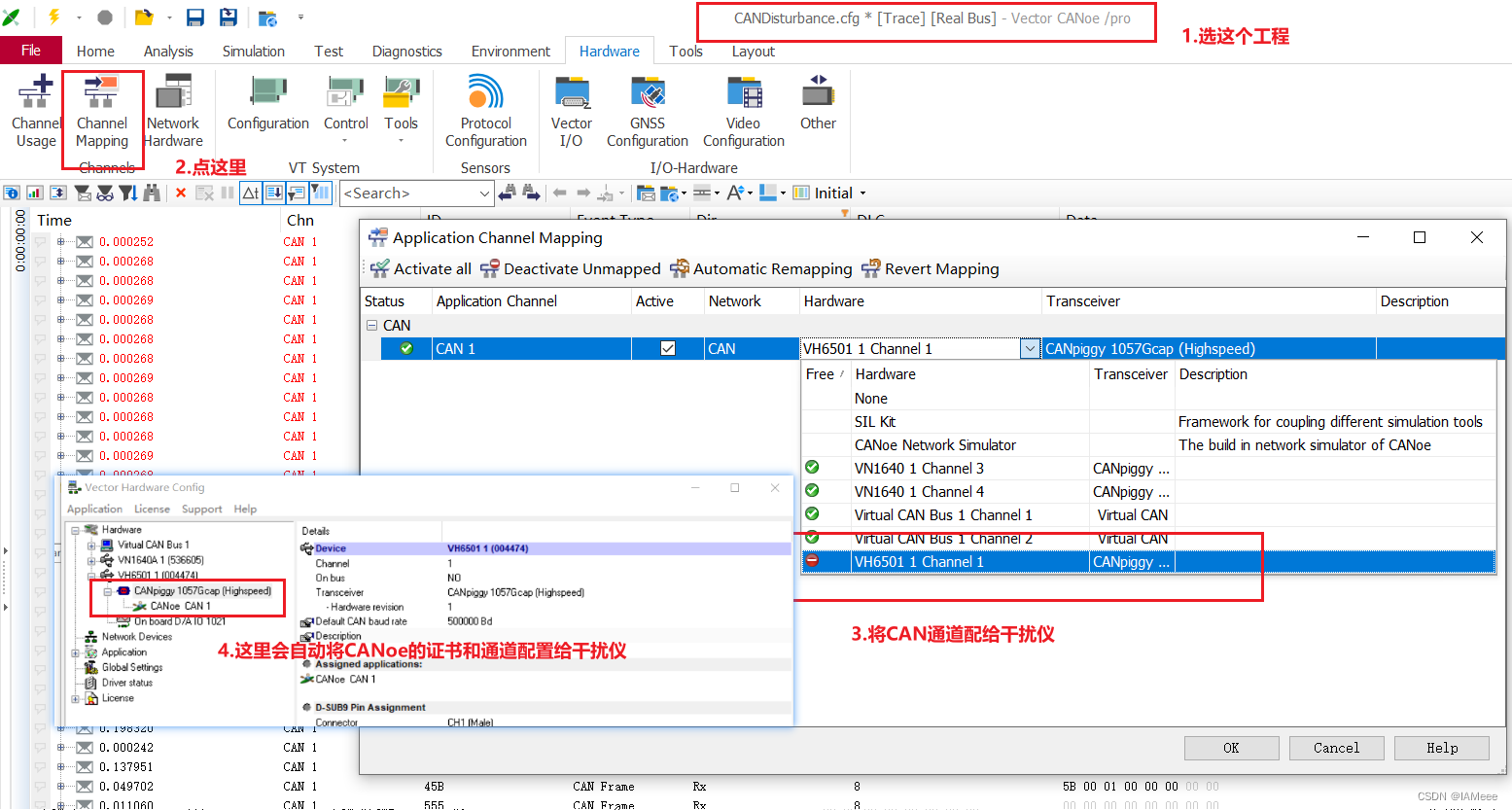
1.硬件通道的配置,以及测试工程的选择,测试工程一般选择CANoe自带的例子。
此处需要注意的是一般使用的是双头DB9连接CANoe与VH6501继续测试,但本文的方式并没有使用双头DB9,整个硬件连接只用了一个DB9连接DUT,因为内容关系在此按下不表,如果有小伙伴感兴趣的可以评论或者私信我。
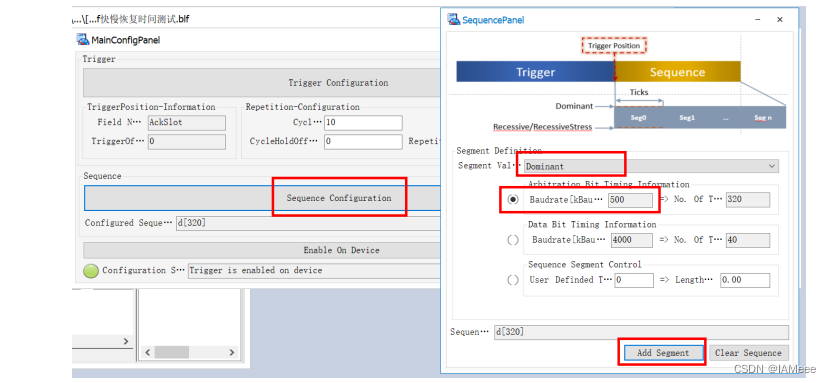
2.打开MainConfigpanel面板,从上到下开始依次配置。
首先配置Trigger Configuration,一般可以选择干扰AckSlot,如果想要干扰特定报文的话,此处报文ID为11位,二进制转换过来为12位删除左边第一位。干扰帧为整个里面出现的第一帧(ID最小的),干扰的报文需要在trcae中持续出现。干扰Rx报文。

3. 干扰的重复次数以及周期

4.Sequence Configuration
如图所示进行配置即可。
到此就已经配置完毕了,点击Enable On Device就可以开始干扰了,由于使用VH6501测试Bus-off并不是本文重点,因此如果有不清楚的地方推荐大家看这篇文章,这也是我上文[1]处引用的文章:CAN Busoff原理/快慢恢复介绍以及利用Vector VH6501 CAN干扰仪经典CAN2.0/CANFD帧触发Busoff![]() https://blog.csdn.net/qfmzhu/article/details/107335763?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171921025716800180631690%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=171921025716800180631690&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-4-107335763-null-null.142%5ev100%5epc_search_result_base4&utm_term=VH6501%20busoff&spm=1018.2226.3001.4187
https://blog.csdn.net/qfmzhu/article/details/107335763?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171921025716800180631690%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=171921025716800180631690&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-4-107335763-null-null.142%5ev100%5epc_search_result_base4&utm_term=VH6501%20busoff&spm=1018.2226.3001.4187
2 Bus-Off的快慢回复及原理
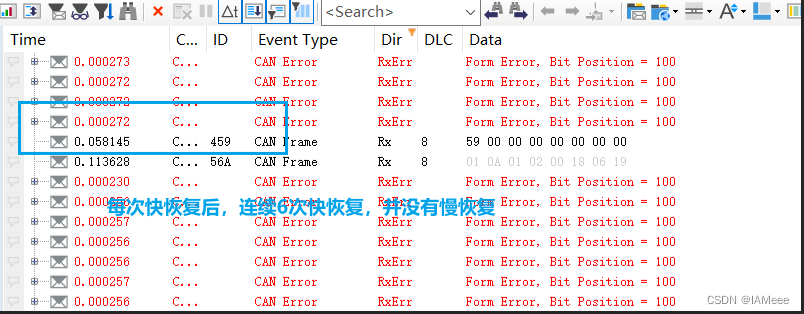
不知道大家有没有碰到过这样的问题,我明明进行了5次bus-off的快恢复,但是第6次bus-off还是快恢复。如果按照下面文字的描述,那经过5次bus-off快恢复后,下一次应该就是慢恢复呀?


这里其实是我们对快慢回复的概念有了误解,快慢恢复其实指的是时间,而没有发报文这个步骤。只要经过了这个时间t,不管ECU有没有发报文,其实都已经经过了一次快恢复/慢恢复。
简单来说:busoff的原理是让计数器累计到255,快慢恢复就是一个时间,没有成功和失败的概念,每次快慢恢复时,控制器会初始化,初始化完成之后如果判断总线恢复了就不再继续增加计数了,如果没有恢复就继续增加到255,50ms和200ms是在计数器恢复到0之后 ECU的判断时间。快恢复就是计数器从255归零之后,等待50ms判断总线是否恢复,如果没有计数器继续累加,持续5次,第六次的等待时间换为200ms。
看快慢恢复的方式是筛选RxErr和Rx的报文,然后看RxErr发出一帧Rx报文之间间隔的时间,下图为慢恢复:

需要注意的是此处需要的是连续不断的干扰, 一旦快恢复发出报文之后,计数器就会清零。上文说到的问题其实是因为没有连续的干扰,每次计数器都清零了,因此只有快恢复没有慢恢复。
相关文章:
从项目中学习Bus-Off的快慢恢复
0 前言 说到Bus-Off,大家应该都不陌生,使用VH6501干扰仪进行测试的文章在网上数不胜数,但是一般大家都是教怎么去干扰,但是说如何去看快慢恢复以及对快慢恢复做出解释比较少,因此本文以实践的视角来讲解Bus-Off的快慢恢…...
视频参考帧和重构帧复用
1、 视频编码中的参考帧和重构帧 从下图的编码框架可以看出,每编码一帧需要先使用当前帧CU(n)减去当前帧的参考帧CU(n)得到残差。同时,需要将当前帧的重构帧CU*(n)输出,然后再读取重构帧进行预测…...
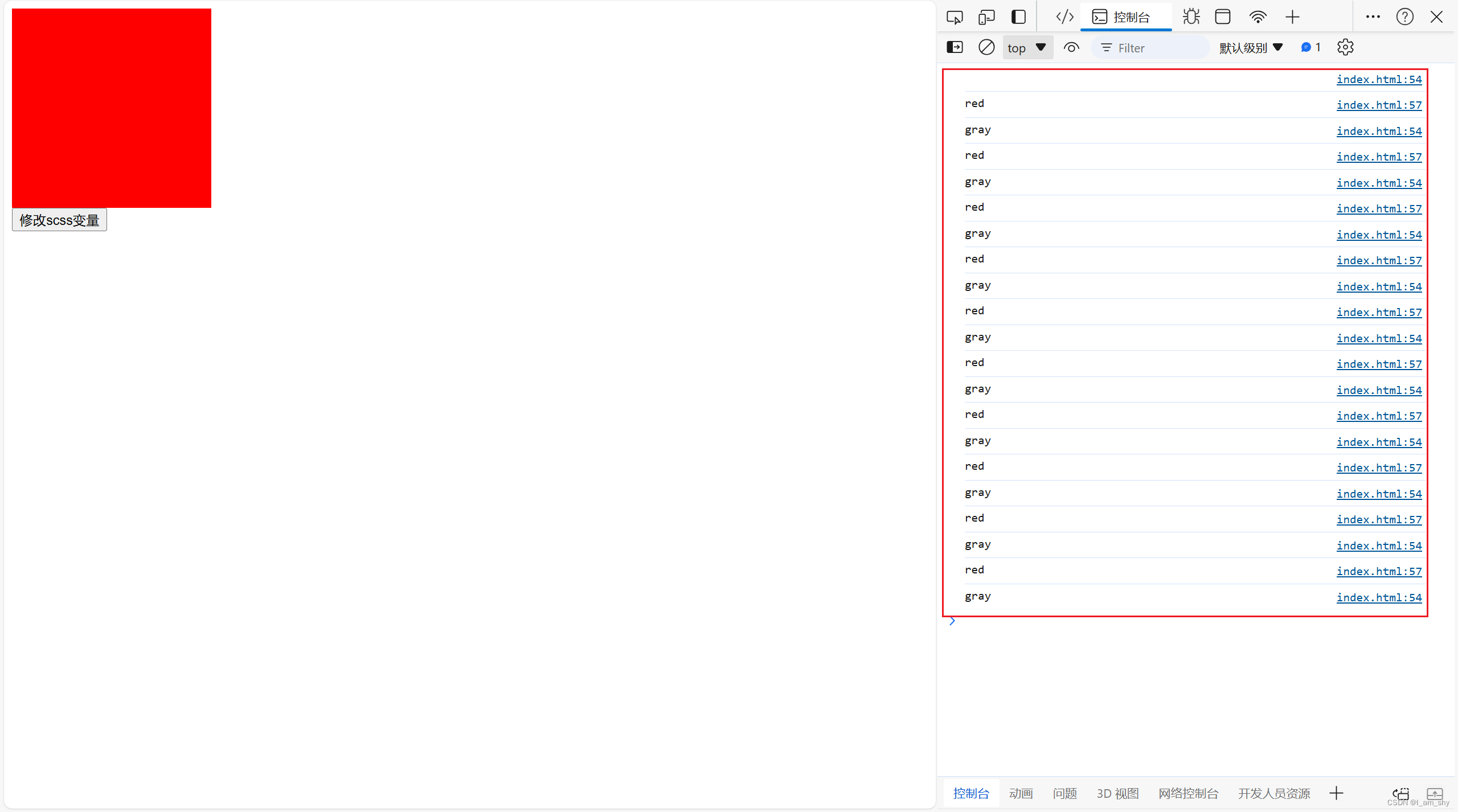
js修改scss变量
style.scss $color : var(--color,#ccc); // 默认值 #ccc .color{background: $color; } 定义了一个scss变量($color),用普通的css变量(--color)给他赋值,这里需要一个默认值,此时css变量(--co…...

【中霖教育怎么样】报考注册会计师有年龄限制吗?
【中霖教育怎么样】报考注册会计师有年龄限制吗? 申请参加注册会计师考试有没有年龄约束? 对于注册会计师的考试,不存在具体的年龄上限。而且该考试的入学门栏相对低,主要对考生的年龄下限规定。 在专业阶段,注册会计师考试要求考生具备…...
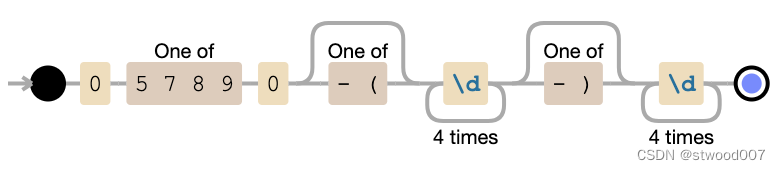
PHP验证日本手机电话号码
首先,您需要了解手机号码的规格。 根据 ,手机和PHS(个人手持电话系统)可以理解为以“070”、“080”和“090”开头的11位数字。 此外,以“050”开头的11位特定IP电话号码也将包含在该目标中。 关于以“060”开头的F…...

Qt 配置ASan
Qt 配置ASan 文章目录 Qt 配置ASan摘要关于ASan(AddressSanitizer)在Qt中配置 ASan1. 安装必要的工具2. 修改项目的 .pro 文件3. 重新构建项目4. 运行应用程序5. 分析错误报告示例注意事项 关键字: Qt、 ASan、 AddressSanitizer 、 GCC …...

MySQL常用操作命令大全
文章目录 一、连接与断开数据库1.1 连接数据库1.2 选择数据库1.3 断开数据库 二、数据库操作2.1 创建数据库2.2 查看数据库列表2.3 删除数据库 三、表操作3.1 创建表3.2 查看表结构3.3 修改表结构3.3.1 添加列3.3.2 删除列3.3.3 修改列数据类型 3.4 删除表 四、数据操作4.1 插入…...
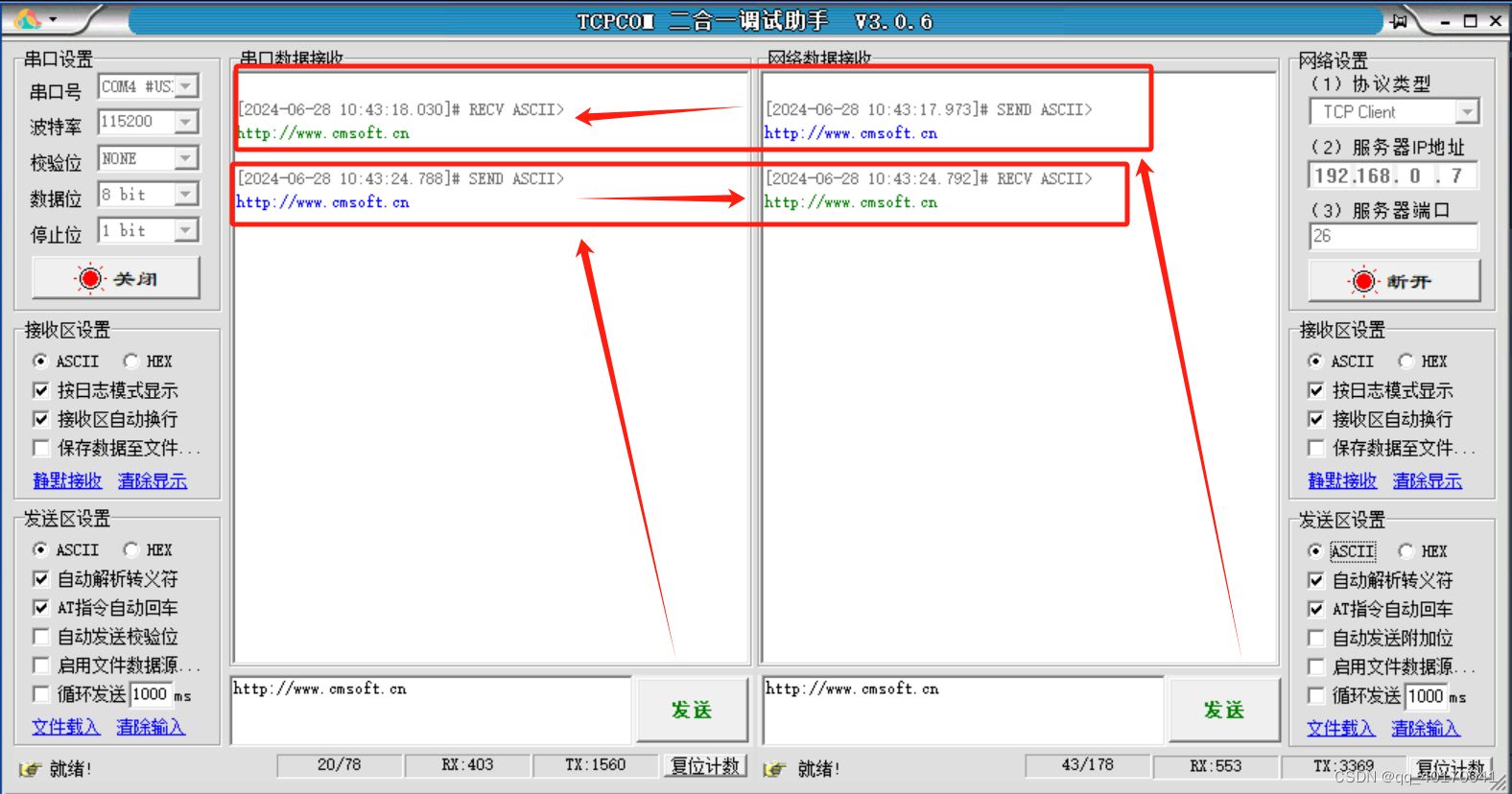
有人物联的串口服务器USR-TCP232-410S基本测试通信和使用方案(485串口和232串口)
1.将 410S(USR-TCP232-410S,简称 410S 下同)的串口通过串口线(或USB 转串口线)与计算机相连接,通过网线将 410S 的网口 PC 的网口相连接,检测硬件连接无错误后,接入我们配送的电源适配器,给 410S 供电。观察指示灯状态…...

二维码登录的原理
二维码登录的原理: 二维码登录是一种基于移动设备和网络技术的便捷登录方式。其原理主要依赖于以下几个关键要素: 随机生成:服务器端随机生成一个具有唯一性和时效性的二维码。编码信息:这个二维码包含了特定的登录信息,例如用户标识、会话标识、时间戳等。扫描识别:用户…...
归并排序详解(递归与非递归)
归并排序是建立在归并操作上的一种有效算法。该算法是采用分治法的一个非常典型的应用。将已有序的子序列合并,得到完全有序的序列;即先使每个子序列有序,再使子序列间断有序。若将两个有序表合并成一个有序表,成为二路归并。 一…...
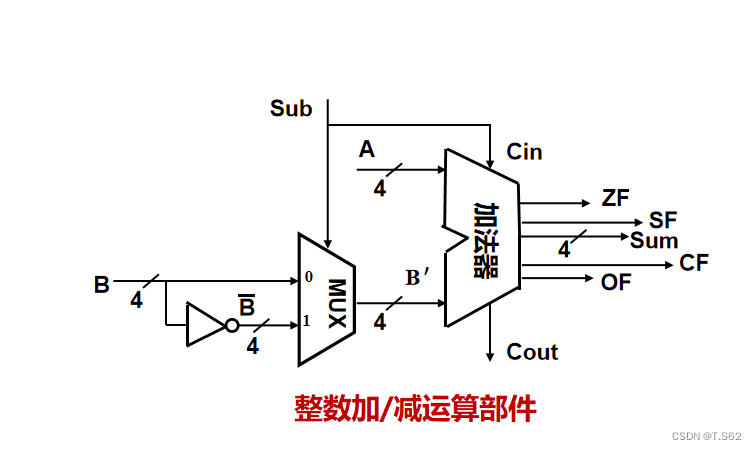
计算机系统基础(二)
1.数值数据的表示 为什么采用二进制? 二进制只有两种基本状态,两个物理器件就可以表示0和1二进制的编码、技术、运算规则都很简单0和1与逻辑命题的真假对应,方便通过逻辑门电路实现算术运算 数值数据表示的三要素 进位记数制(十…...
vue根据文字长短展示跑马灯效果
介绍 为大家介绍一个我编写的vue组件 auto-marquee ,他可以根据要展示文本是否超出展示区域,来判断是否使用跑马灯效果,效果图如下所示 假设要展示区域的宽度为500px,当要展示文本的长度小于500px时,只会展示文本&…...
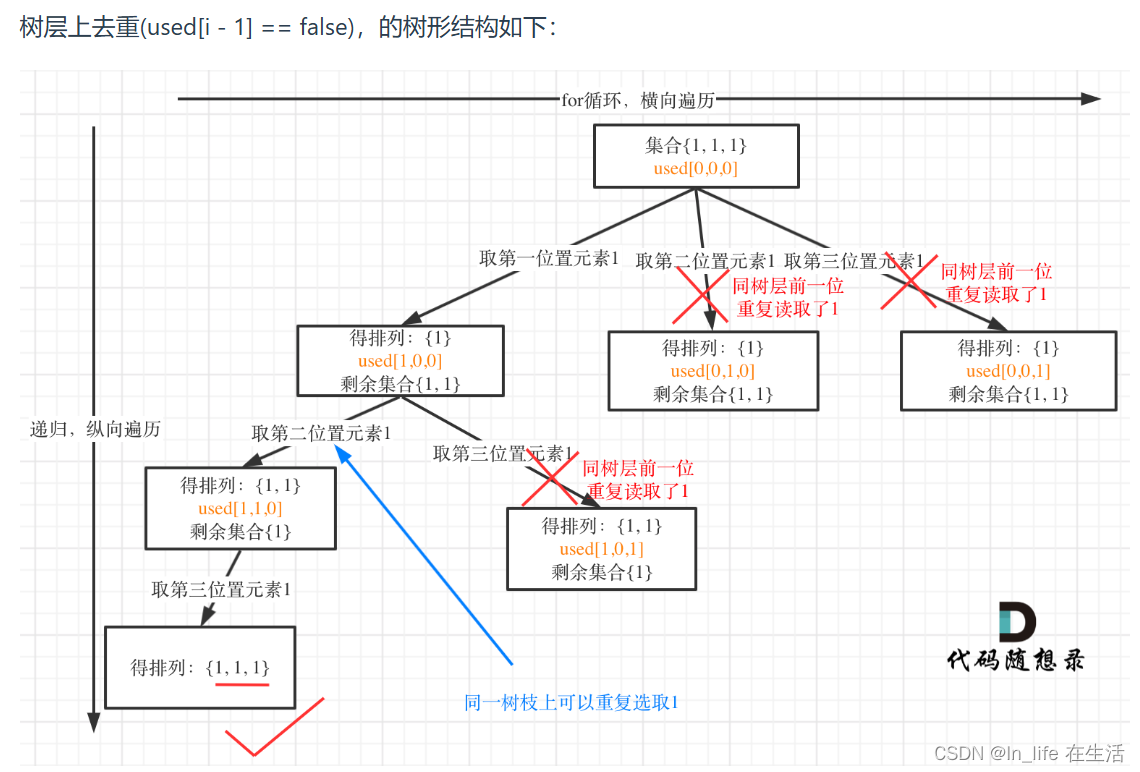
leetcode-21-回溯-全排列及其去重
一、[46]全排列 给定一个 没有重复 数字的序列,返回其所有可能的全排列。 示例: 输入: [1,2,3]输出: [ [1,2,3], [1,3,2], [2,1,3], [2,3,1], [3,1,2], [3,2,1] ] 其中,不需要使用startIndex used数组,其实就是记录此时path里都有哪些元素…...

如何根据两个关键字查询报错日志的位置
1、查找两个关键字(无顺序要求) 如果你不关心这两个关键字出现的顺序,你可以使用egrep(等同于grep -E)或grep的-E选项来启用扩展正则表达式,并使用管道(|)来组合两个搜索模式。 gr…...

短视频预算表:成都柏煜文化传媒有限公司
短视频预算表:精打细算,打造高质量视觉盛宴 在数字时代,短视频以其独特的魅力迅速占领了互联网内容的半壁江山,成为品牌宣传、文化传播乃至个人表达的重要载体。然而,每一个成功的短视频背后,都离不开一份…...
【Llama 2的使用方法】
Llama 2是Meta AI(Facebook的母公司Meta的AI部门)开发并开源的大型语言模型系列之一。Llama 2是在其前身Llama模型的基础上进行改进和扩展的,旨在提供更强大的自然语言处理能力和更广泛的应用场景。 以下是Llama 2的一些关键特性和更新点&am…...
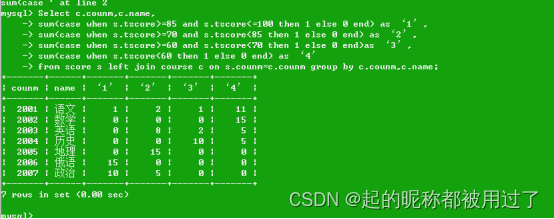
mysql-sql-第十三周
学习目标: sql 学习内容: 37.查询各科成绩最高分、最低分和平均分: 以如下形式显示:课程 ID,课程 name,最高分,最低分,平均分,及格率,中等率,优良率,优秀率 及格为>60,中等为:70-80,优良为:80-90,优秀…...

【Android】ViewPage2嵌套Fragment+SeekBar横向滑动冲突
问题描述 ViewPage2嵌套FragmentSeekBar,拖动SeekBar的进度条时,触发ViewPage2的滑动。 解决方案: 方案一:通过事件总线ViewPage2的isUserInputEnabled属性 子Fragment: class SeekBarFragment : Fragment() {priv…...

【408考点之数据结构】图的遍历
图的遍历 图的遍历是指从图中的某个顶点出发,按照一定的规则访问图中所有顶点,并使每个顶点仅被访问一次。图的遍历包括两种主要方法:深度优先搜索(DFS)和广度优先搜索(BFS)。这两种遍历方法在…...
自动驾驶---Motion Planning之多段五次多项式
1 前言 在之前的博客系列文章中和读者朋友们聊过Apollo的 Motion Planning方案: 《自动驾驶---Motion Planning之LaneChange》 《自动驾驶---Motion Planning之Path Boundary》 《自动驾驶---Motion Planning之Speed Boundary》 《自动驾驶---Motion Planning之轨迹Path优化》…...

如何在IDEA中打造你的私人阅读空间:3个实用技巧提升编程效率与阅读体验
如何在IDEA中打造你的私人阅读空间:3个实用技巧提升编程效率与阅读体验 【免费下载链接】thief-book-idea IDEA插件版上班摸鱼看书神器 项目地址: https://gitcode.com/gh_mirrors/th/thief-book-idea 在快节奏的编程工作中,如何有效利用碎片化时…...

别再只拖控件了!VisionPro ToolBlock高级脚本入门:从变量声明到自定义运行记录的完整流程
别再只拖控件了!VisionPro ToolBlock高级脚本入门:从变量声明到自定义运行记录的完整流程 在工业视觉检测领域,拖拽式图形界面曾让无数工程师快速入门,但当项目复杂度攀升时,那些隐藏在控件背后的脚本能力才是真正的效…...

WebToEpub:3分钟将网页小说转为EPUB电子书的终极解决方案
WebToEpub:3分钟将网页小说转为EPUB电子书的终极解决方案 【免费下载链接】WebToEpub A simple Chrome (and Firefox) Extension that converts Web Novels (and other web pages) into an EPUB. 项目地址: https://gitcode.com/gh_mirrors/we/WebToEpub 还在…...
)
零代码也能做游戏?用UE5蓝图系统10分钟做个会转的潜艇(附完整资产包)
零代码游戏开发:用UE5蓝图10分钟打造动态潜艇 当第一次打开虚幻引擎5时,许多初学者会被其庞大的功能体系所震撼——从影视级的光照系统到数百万面的高精度模型渲染,这款引擎几乎能实现任何你能想象到的视觉效果。但更令人惊喜的是,…...

达梦数据库主备集群手工搭建及主备切换演练
环境:DM8、Linux(CentOS 7 ),三台服务器。 本文记录从零搭一套"一主一备一监视" 式的主备集群,纯手工操作,不依赖图形化工具。 一、环境规划 1.1 IP规划 角色主机名业务IP心跳IP实例名主库&…...

利用 Taotoken 模型广场为不同智能体任务选择合适的模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用 Taotoken 模型广场为不同智能体任务选择合适的模型 在设计多智能体系统时,一个常见的挑战是如何为系统中承担不同…...

3个创新视角:重新定义AMD平台内存监控的新范式
3个创新视角:重新定义AMD平台内存监控的新范式 【免费下载链接】ZenTimings 项目地址: https://gitcode.com/gh_mirrors/ze/ZenTimings 在AMD Ryzen平台的性能调优领域,内存时序监控一直是个技术门槛较高的领域。传统监控工具往往停留在表面参数…...

034、LVGL默认主题与自定义主题
LVGL默认主题与自定义主题 一次UI“变脸”引发的血案 上周调试一块基于STM32F429的智能家居面板,LVGL版本8.3.5。客户要求界面风格从“科技蓝”改成“暖木色”,我心想不就是改个颜色主题嘛,简单。结果改完lv_conf.h里的LV_THEME_DEFAULT_COLOR_PRIMARY,编译下载,屏幕一亮…...

为啥大模型都要用 Token 调用,不能直接扒网页端接口?
1. 网页端接口是「给人用的」,随时会改 网页版(比如官网聊天页)的接口: 参数、请求头、加密算法、签名天天变 前端一改版,接口地址、加密方式直接作废 你好不容易扒完,过两天就挂,还要重新抓包、逆向 而官方开放的 API + Token 是稳定商用接口,几年都不换格式,专门给…...

嘎嘎降AI和笔灵AI哪个更适合毕业论文:2026年达标率改写质量售后完整测评对比报告
嘎嘎降AI和笔灵AI哪个更适合毕业论文:2026年达标率改写质量售后完整测评对比报告 帮几个不同专业的同学处理过论文AI率,用过的工具加起来也有六七款了。 综合看,嘎嘎降AI(www.aigcleaner.com)是最稳的选择࿰…...