基于opencv的斜光测距及python实现
1.前言
最近做了一个基于opencv的斜光测距的小项目,东西不多,但是很有意思,值得拿出来学一学。项目里面需要比较精确的定位功能,将前人matlab代码移植到python上,并且做了一些优化,简化逻辑(毕竟我是专业的程序员),也用了tkinter界面包装了一下,最后通过pyinstaller打包成程序给同事使用。
2.原理
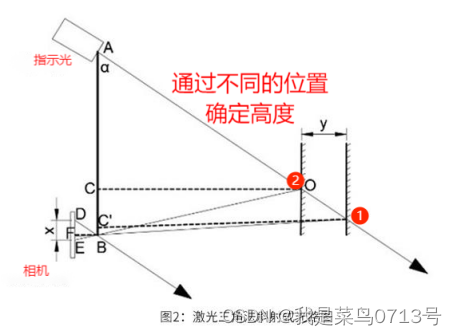
通过使用不同的亮点位置和对应的高度进行多元线性回归建模,再对新的亮点位置进行高度预测。

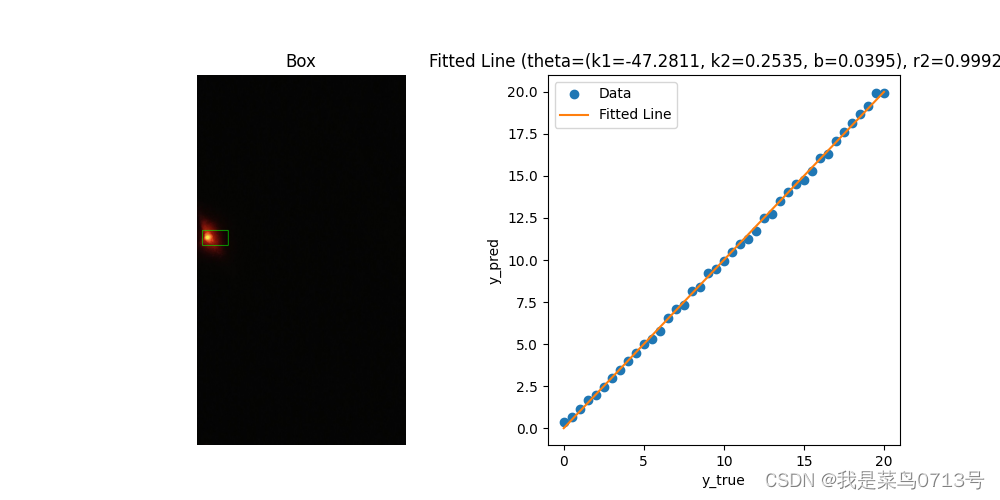
如图分别是14,14.5,15,15.5对应的四张光点位置图。
3.获取亮点位置
def get_box(image):# 将图像转换为灰度图像gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 应用高斯模糊来减少噪声blurred = cv2.GaussianBlur(gray, (5, 5), 0)max_val = np.max(blurred)_, binary = cv2.threshold(blurred, max_val/2, 255, cv2.THRESH_BINARY)# 形态学开运算去除噪声kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))opened = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)# 找到轮廓contours, _ = cv2.findContours(opened, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 如果找到轮廓,计算质心if contours:largest_contour = max(contours, key=cv2.contourArea)M = cv2.moments(largest_contour)if M["m00"] != 0:cx = int(M["m10"] / M["m00"])cy = int(M["m01"] / M["m00"])else:cx, cy = 0, 0centroid = (cx, cy)# 计算边界框x, y, w, h = cv2.boundingRect(largest_contour)p=10bbox = (x-p, y-p, w+2*p, h+2*p)# 在图像上绘制质心和边界框output_image = image.copy()cv2.circle(output_image, centroid, 5, (0, 255, 0), -1)x,y,w,h=bboxcv2.rectangle(output_image, (x, y), (x + w, y + h), (0, 255, 0), 2)print(f"亮点的中心位置: {centroid},亮点的边界框: {bbox}")return centroid,bbox,output_imageelse:return None
4.建模
不想再安装其它的python包了,就基于numpy写的LineRegression。
class LinearRegression:def __init__(self):self.theta = Nonedef fit(self, X, y):"""训练线性回归模型参数:X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量y:因变量数据,形状为 (m, 1)"""# 在 X 前面加一列1,以便于计算截距项X_b = np.c_[np.ones((X.shape[0], 1)), X]# 使用正规方程求解回归系数self.theta = np.linalg.inv(X_b.T @ X_b) @ X_b.T @ ydef predict(self, X):"""对新样本进行预测参数:X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量返回值:y_pred:预测的因变量数据,形状为 (m, 1)"""if self.theta is None:raise ValueError("模型未经过训练,请先调用 fit 方法")# 在 X 前面加一列1,以便于计算截距项X_b = np.c_[np.ones((X.shape[0], 1)), X]# 使用训练得到的回归系数进行预测y_pred = X_b @ self.thetareturn y_pred
建模效果
5.全部代码
项目地址:https://gitee.com/zhang_jie_sc/auto-focus
import re
import cv2
import numpy as np
import osfrom matplotlib import pyplot as pltdef get_box(image):# 将图像转换为灰度图像gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 应用高斯模糊来减少噪声blurred = cv2.GaussianBlur(gray, (5, 5), 0)max_val = np.max(blurred)_, binary = cv2.threshold(blurred, max_val/2, 255, cv2.THRESH_BINARY)# 形态学开运算去除噪声kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))opened = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)# 找到轮廓contours, _ = cv2.findContours(opened, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 如果找到轮廓,计算质心if contours:largest_contour = max(contours, key=cv2.contourArea)M = cv2.moments(largest_contour)if M["m00"] != 0:cx = int(M["m10"] / M["m00"])cy = int(M["m01"] / M["m00"])else:cx, cy = 0, 0centroid = (cx, cy)# 计算边界框x, y, w, h = cv2.boundingRect(largest_contour)p=10bbox = (x-p, y-p, w+2*p, h+2*p)# 在图像上绘制质心和边界框output_image = image.copy()cv2.circle(output_image, centroid, 5, (0, 255, 0), -1)x,y,w,h=bboxcv2.rectangle(output_image, (x, y), (x + w, y + h), (0, 255, 0), 2)print(f"亮点的中心位置: {centroid},亮点的边界框: {bbox}")return centroid,bbox,output_imageelse:return Nonedef get_files(dir):img_path_list = [f for f in os.listdir(dir) iff.startswith('Point') and f.endswith('.jpg')] # 获取该文件夹中所有jpg格式的图像val_list=[]for p in img_path_list:# 使用正则表达式匹配_后.前的0或0.5match = re.search(r'_(\d+(\.\d+)?)\.', p)if match:val=match.group(1)val_list.append(float(val))else:raise ValueError('{0}文件名错误,无法提取位置i学那些'.format(p))return img_path_list,val_listdef merge_intersecting_boxes(boxes):merged_boxes = []# 计算包含所有框的大框x_min = min(box[0] for box in boxes)y_min = min(box[1] for box in boxes)x_max = max(box[0] + box[2] for box in boxes)y_max = max(box[1] + box[3] for box in boxes)big_box = (x_min, y_min, x_max - x_min, y_max - y_min)# 返回大框和空的合并框列表return big_box, merged_boxesdef r2_score(y_true,y_pred):# 计算相关系数corr = np.corrcoef(y_true, y_pred)[0, 1]# 计算 R 方值r2 = corr ** 2return r2def plot_image_and_r2_zzz(image, x, y,r2,theta):# 将 BGR 格式转换为 RGB 格式image = cv2.cvtColor(image.copy(), cv2.COLOR_BGR2RGB)# 创建一个图形和两个子图fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 5), gridspec_kw={'top': 0.85})# 设置窗口标题方式二fig.canvas.manager.window.title("建模结果")# 在第一个子图中显示图片ax1.imshow(image)ax1.axis('off')ax1.set_title('Box')# 在第二个子图中显示拟合直线ax2.plot(x, y, 'o', label='Data')ax2.plot(x, x, label='Fitted Line')# 将每个数字转换为字符串,保留五位小数theta_str = "(k1={:.4f}, k2={:.4f}, b={:.4f})".format(*theta)ax2.set_title('Fitted Line (theta={}, r2={:.5f})'.format(theta_str,r2))# 添加轴标签ax2.set_xlabel('y_true')ax2.set_ylabel('y_pred')ax2.legend()# 显示图形plt.tight_layout()plt.show()class LinearRegression:def __init__(self):self.theta = Nonedef fit(self, X, y):"""训练线性回归模型参数:X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量y:因变量数据,形状为 (m, 1)"""# 在 X 前面加一列1,以便于计算截距项X_b = np.c_[np.ones((X.shape[0], 1)), X]# 使用正规方程求解回归系数self.theta = np.linalg.inv(X_b.T @ X_b) @ X_b.T @ ydef predict(self, X):"""对新样本进行预测参数:X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量返回值:y_pred:预测的因变量数据,形状为 (m, 1)"""if self.theta is None:raise ValueError("模型未经过训练,请先调用 fit 方法")# 在 X 前面加一列1,以便于计算截距项X_b = np.c_[np.ones((X.shape[0], 1)), X]# 使用训练得到的回归系数进行预测y_pred = X_b @ self.thetareturn y_predif __name__=='__main__':file_dir="./20240531_113524"img_path_list, locs = get_files(file_dir)coors = []boxs = []for i, image_name in enumerate(img_path_list): # 逐一读取图像item = cv2.imread(os.path.join(file_dir, image_name))cneter, box, _ = get_box(item)coors.append(list(cneter))boxs.append(box)merge_box, _ = merge_intersecting_boxes(boxs)# 使用线性回归拟合数据matx = np.array(coors)arr_x = matx[:, 0]reg = LinearRegression()reg.fit(matx, locs)y_true = np.array(locs)y_pred = reg.predict(matx)r2 = r2_score(y_true, y_pred)# 输出 R^2 值draw_img = cv2.imread(os.path.join(file_dir, img_path_list[0]), cv2.IMREAD_COLOR)x, y, w, h = merge_boxcv2.rectangle(draw_img, (x, y), (x + w, y + h), (0, 255, 0), 2)plot_image_and_r2_zzz(draw_img, y_true, y_pred, r2, reg.theta)
相关文章:
基于opencv的斜光测距及python实现
1.前言 最近做了一个基于opencv的斜光测距的小项目,东西不多,但是很有意思,值得拿出来学一学。项目里面需要比较精确的定位功能,将前人matlab代码移植到python上,并且做了一些优化,简化逻辑(毕竟我是专业的…...

梯度下降算法
占楼,明天写...

第5章:软件工程
第5章:软件工程 软件工程概述 软件生命周期 软件过程 1.能力成熟度模型(CMM) CMM(能力成熟度模型)是一个评估和确定组织软件过程成熟度的模型。它最早于1987年由美国国防部软件工程研究所(SEI)提出,其目的…...
含源代码)
cefsharp在splitContainer.Panel2中显示调试工具DevTools(非弹出式)含源代码
一、弹出式调试工具 (ShowDevTools) ChromiumWebBrowser webbrowser; public void showDevTools(){//定位到某元素webbrowser.ShowDevTools(null, parameters.XCoord, parameters.YCoord);...
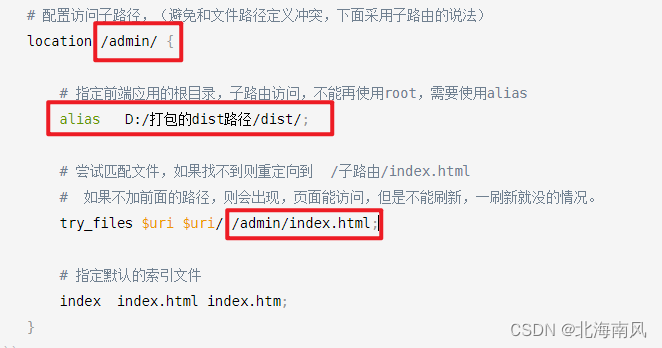
nginx部署多个项目;vue打包项目部署设置子路径访问;一个根域名(端口)配置多个子项目
本文解决: vue打包项目部署设置子路径访问;nginx部署多个子项目;一个ip/域名 端口 配置多个子项目;配置后,项目能访问,但是刷新页面就丢失的问题 注:本文需要nginx配置基础。基础不牢的可见文…...

02-部署LVS-DR群集
1.LVS-DR工作原理 LVS-DR模式,Director Server作为群集的访问入口,不作为网购使用,节点Director Server 与 Real Server 需要在同一个网络中,返回给客户端的数据不需要经过Director Server 为了响应对整个群集的访问,…...
DataWhale-吃瓜教程学习笔记 (六)
学习视频**:第4章-决策树_哔哩哔哩_bilibili 西瓜书对应章节: 第五章 5.1;5.2;5.3 文章目录 MP 神经元- 感知机模型 (分类模型)-- 损失函数定义--- 感知机学习算法 - 随机梯度下降法 - 神经网络需要解决的问…...

在docker配置Nginx环境配置
应用于商业模式集中,对于各种API的调用,对于我们想要的功能进行暴露,对于不用的进行拦截进行鉴权。用于后面的付费 开发环境 正式上线模式 一、常用命令 停止:docker stop Nginx重启:docker restart Nginx删除服务&a…...

在不修改.gitignore的情况下,忽略个人文件的提交
Git提供了一个assume-unchanged命令,可以将文件标记为“假设未更改”。这意味着Git将忽略该文件的更改,不会将其提交到仓库中。要使用该命令,只需运行以下命令: git update-index --assume-unchanged <file>其中࿰…...

【Unity navmeshaggent 组件】
【Unity navmeshaggent 组件】 组件概述: NavMeshAgent是Unity AI系统中的一个组件,它允许游戏对象(通常是一个角色或AI)在导航网格(NavMesh)上自动寻路。 组件属性: Radius:导航…...
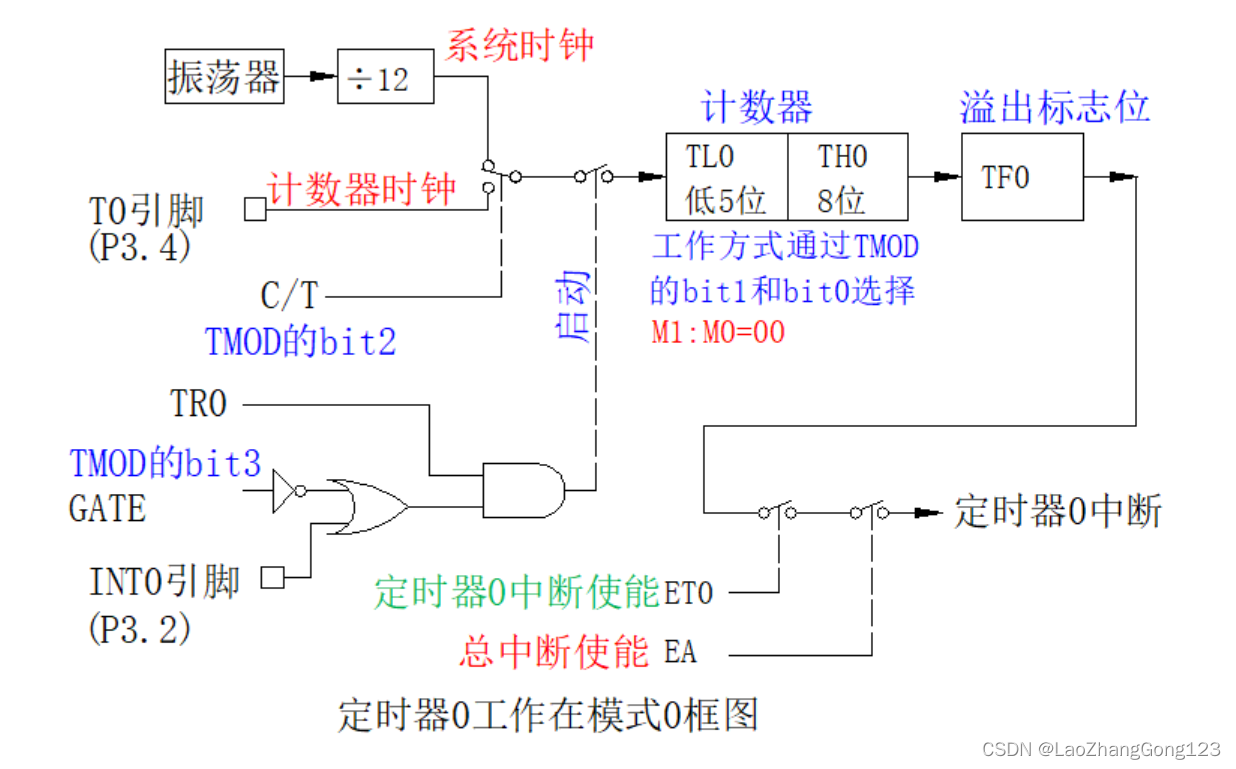
51单片机第18步_将TIM0用作13位定时器
本章重点学习将TIM0用作13位定时器。 1、定时器0工作在模式0框图 2、定时器0工作在模式0举例 1、Keil C51中有一些关键字,需要牢记: interrupt 0:指定当前函数为外部中断0; interrupt 1:指定当前函数为定时器0中断…...

构建现代医疗:互联网医院系统源码与电子处方小程序开发教学
本篇文章,笔者将探讨互联网医院系统的源码结构和电子处方小程序的开发,帮助读者更好地理解和掌握这些前沿技术。 一、互联网医院系统源码结构 互联网医院系统通常由多个模块组成,每个模块负责不同的功能。以下是一个典型的互联网医院系统的主…...

2024亚太赛(中文赛)数学建模竞赛选题建议+初步分析
提示:DS C君认为的难度:B<C<A,开放度:C<A<B。 综合评价来看 A题适合有较强计算几何和优化能力的团队,难度较高,但适用面较窄。 B题数据处理和分析为主,适合数据科学背景的团队…...

10 - Python文件编程和异常
文件和异常 在实际开发中,常常需要对程序中的数据进行持久化操作,而实现数据持久化最直接简单的方式就是将数据保存到文件中。说到“文件”这个词,可能需要先科普一下关于文件系统的知识,对于这个概念,维基百科上给出…...
AI绘画-Stable Diffusion 原理介绍及使用
引言 好像很多朋友对AI绘图有兴趣,AI绘画背后,依旧是大模型的训练。但绘图类AI对计算机显卡有较高要求。建议先了解基本原理及如何使用,在看看如何实现自己垂直行业的绘图AI逻辑。或者作为使用者,调用已有的server接口。 首先需…...

2024年过半,新能源车谁在掉链子?
2024年过半之际,各品牌上半年的销量数据也相继出炉,是时候考察今年以来的表现了。 理想和鸿蒙智行两大增程霸主占据头两名,仍处于焦灼状态;极氪和蔚来作为高端纯电品牌紧随其后,两者之间差距很小;零跑和哪…...

离线查询+线段树,CF522D - Closest Equals
一、题目 1、题目描述 2、输入输出 2.1输入 2.2输出 3、原题链接 522D - Closest Equals 二、解题报告 1、思路分析 考虑查询区间已经给出,我们可以离线查询 对于这类区间离线查询的问题我们通常可以通过左端点排序,然后遍历询问同时维护左区间信息…...

CTF常用sql注入(二)报错注入(普通以及双查询)
0x05 报错注入 适用于页面无正常回显,但是有报错,那么就可以使用报错注入 基础函数 floor() 向下取整函数 返回小于或等于传入参数的最大整数。换句话说,它将数字向下取整到最接近的整数值。 示例: floor(3.7) 返回 3 floor(-2…...
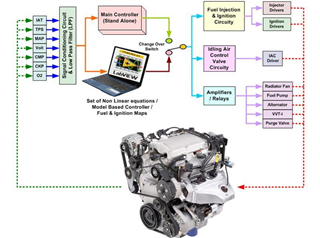
LabVIEW汽车ECU测试系统
开发了一个基于LabVIEW开发的汽车发动机控制单元(ECU)测试系统。该系统使用了NI的硬件和LabVIEW软件,能够自动执行ECU的功能测试和性能测试,确保其在不同工作条件下的可靠性和功能性。通过自动化测试系统,大大提高了测…...
3个让你爽到爆炸的学习工具
We OCR WeOCR 是一个基于浏览器的文字识别工具,用户可以通过上传图片来识别其中的文本信息。它是一个渐进式网络应用程序(PWA),可以在浏览器中离线使用。WeOCR 是开源的,并且基于 Tesseract OCR 引擎开发。用户无需在本…...

Topit:macOS窗口置顶神器,让多任务处理效率翻倍
Topit:macOS窗口置顶神器,让多任务处理效率翻倍 【免费下载链接】Topit Pin any window to the top of your screen / 在Mac上将你的任何窗口强制置顶 项目地址: https://gitcode.com/gh_mirrors/to/Topit 你是否经常在macOS上同时处理多个任务时…...
)
蓝牙抓包不求人:从HCI日志里‘挖’出Link Key的两种实用方法(附安卓路径)
蓝牙安全逆向实战:从HCI日志中提取Link Key的深度解析在蓝牙协议安全研究领域,Link Key作为设备配对认证的核心凭证,其获取方式一直是逆向工程师关注的焦点。许多安全审计场景下,我们往往只能获得加密后的HCI通信日志,…...

服务器日志分析实战:用Python追踪HTTP 404错误并可视化异常频率
作为一名爬虫开发者或网站运维人员,服务器日志就像飞机的“黑匣子”——它记录了每个请求的来龙去脉。而404错误(页面未找到)尤其值得关注:它可能是用户输错了网址,可能是你爬虫的URL构造逻辑有漏洞,也可能是网站改版后旧的链接失效了。更严重的是,大量突然涌出的404请求…...

Python UiAutomation实战:从网页数据抓取到桌面应用,一个库打通数据采集全链路
Python UiAutomation实战:打通数据采集全链路的智能解决方案 在数据驱动的商业环境中,企业常常面临跨平台数据采集的挑战——财务系统里的交易记录需要与网站后台的报表进行交叉分析,销售数据要从桌面软件导出后上传到云端处理系统。传统的人…...

WebSocket实时通信架构进阶:Room、命名空间与集群部署
WebSocket实时通信架构进阶:Room、命名空间与集群部署 作者:Crown_22 | AI Agent & Hermes Agent 桌面程序开发者 前言 WebSocket已经成为实时应用的标准技术,但大多数教程只停留在"建立连接、发送消息"的基础阶段。在生产环境中,你需要处理Room管理、命名空…...

开源ELM327 OBD-II适配器:从硬件设计到多协议固件实现全解析
1. 项目概述:开源ELM327 OBD适配器如果你对汽车诊断、数据监控或者嵌入式开发感兴趣,那么自己动手做一个OBD-II适配器绝对是个能让你学到很多东西的硬核项目。今天要聊的,就是一个完全开源的、基于NXP LPC1517微控制器的ELM327兼容OBD适配器。…...

TVA注意力层INT8量化配置技巧
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

基于IRS2092的200W D类功放设计:从PWM原理到保护电路实战
1. 项目概述与核心思路折腾音响功放,从经典的AB类玩到D类,感觉就像是从燃油车换到了电动车,动力响应和效率完全是两个维度。这次要聊的这块“200W Class-D Audio Power Amplifier [150115]”单板功放,就是一个非常典型的D类功放设…...

XZ6128A工作电压5-100V 输出电流5A 升压型大功率LED灯恒流驱动控制芯片
概述 XZ6128A是一款高效率、高精度的升压型大功率LED灯恒流驱动控制芯片。 XZ6128A内置高精度误差放大器,固定关断时间控制电路,恒流驱动电路等,特别适合大功率、多个高亮度LED灯串的恒流驱动。 XZ6128A采用固定关断时间的控制方式࿰…...

Nacos CVE-2021-29441漏洞深度解析:User-Agent绕过与鉴权失效
1. 这个漏洞不是“改个Header就能登录”,而是Nacos鉴权体系的一道裂缝CVE-2021-29441这个编号在Nacos社区里曾被轻描淡写地归为“低危”,直到我接手一个金融客户线上告警——他们的Nacos集群在凌晨三点被批量创建了37个高权限用户,所有操作日…...