YOLOv5改进 | 损失函数 | EIoU、SIoU、WIoU、DIoU、FocuSIoU等多种损失函数
秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
专栏目录: 《YOLOv5入门 + 改进涨点》专栏介绍 & 专栏目录 |目前已有40+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进
在目标检测领域内,尽管YOLO系列的算法傲视群雄,但在某些方面仍然存在改进的空间。在YOLOv5的损失函数中,默认是使用的CIoU,但是CIoU仍然存在一定的问题。例如CIOU的计算方式相对复杂,需要对边界框的坐标进行更多的处理和计算。本文给大家带来的教程是将原来的CIoU替换为EIoU、SIoU、WIoU、DIoU、FocusIoU。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
专栏地址:YOLOv5改进+入门——持续更新各种有效涨点方法——点击即可跳转
目录
1. ✒️CIoU
1.1 CIoU原理
1.2 CIoU计算
1.3 📌CIoU代码实现
2. ✒️WIOU(Efficient-IoU)
2.1 WIoU原理
2.2 代码实现
3. 将EIoU、SIoU、WIoU、DIoU、FocusIoU添加到YOLOv5中
3.1 添加代码
3.2 回调函数
4.完整代码分享
5. 进阶
6. 总结
1. ✒️CIoU
1.1 CIoU原理
论文地址:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression——点击即可跳转
论⽂考虑到bbox回归三要素中的⻓宽⽐还没被考虑到计算中,为此,进⼀步在DIoU的基础上提出了CIoU,同时考虑两个矩形的长宽比,也就是形状的相似性。所以CIOU在DIOU的基础上添加了长宽比的惩罚项。

其中, 是权重函数, 而用来度量长宽比的相似性。计算公式为:

☀️优点
更准确的相似性度量:CIOU考虑了边界框的中心点距离和对角线距离,因此可以更准确地衡量两个边界框之间的相似性,尤其是在目标形状和大小不规则的情况下。 鲁棒性更强:相比传统的IoU,CIOU对于目标形状和大小的变化更具有鲁棒性,能够更好地适应各种尺寸和形状的目标检测任务。
⚡️缺点
计算复杂度增加:CIOU引入了额外的中心点距离和对角线距离的计算,因此相比传统的IoU,计算复杂度有所增加,可能会增加一定的计算成本。 实现难度较高:CIOU的计算方式相对复杂,需要对边界框的坐标进行更多的处理和计算,因此在实现上可能会相对困难一些,需要更多的技术和经验支持。
1.2 CIoU计算
中心点 b、中心点 bgt的坐标分别为:(3,4)、(6,6),由此CIoU计算公式如下:


1.3 📌CIoU代码实现
import numpy as np
import IoU
import DIoU
# box : [左上角x坐标,左上角y坐标,右下角x坐标,右下角y坐标]
box1 = [0, 0, 6, 8]
box2 = [3, 2, 9, 10]
# CIoU
def CIoU(box1, box2):x1, y1, x2, y2 = box1x3, y3, x4, y4 = box2# box1的宽:box1_w,box1的高:box1_h,box1_w = x2 - x1box1_h = y2 - y1# box2的宽:box2_w,box2的高:box2_h,box2_w = x4 - x3box2_h = y4 - y3iou = IoU(box1, box2)diou = DIoU(box1, box2)# v用来度量长宽比的相似性v = (4 / (np.pi) ** 2) * (np.arctan(int(box2_w / box2_h)) - np.arctan(int(box1_w / box1_h)))# α是权重函数a = v / ((1 + iou) + v)ciou = diou - a * vreturn ciouprint(CIoU(box1, box2))2. ✒️WIOU(Efficient-IoU)
2.1 WIoU原理
WIoU的主要原理
论文地址: Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
WIoU(Wise-IoU)是为了改进边界框回归(Bounding Box Regression, BBR)损失而提出的一种新的损失函数。WIoU引入了一种动态的非单调聚焦机制(Focusing Mechanism, FM),用于解决高质量和低质量样本对模型训练的不利影响。其主要原理如下:
-
动态非单调聚焦机制:
-
WIoU使用非单调聚焦机制,通过评估anchor box(锚框)的离群度(outlier degree)来衡量其质量。
-
离群度的计算公式是β = LIoU / LIoU,即将IoU损失标准化。
-
聚焦机制会根据离群度分配梯度增益。对高质量的anchor box分配较小的梯度增益,对低质量的anchor box分配较小的梯度增益,从而减少低质量样本对模型训练的负面影响。
-
-
梯度增益分配策略:
-
WIoU引入了一个“明智的”梯度增益分配策略,使得模型能够关注普通质量的anchor box。
-
这种策略减少了高质量anchor box的竞争性,同时也减少了低质量样本产生的有害梯度,从而提高了模型的整体性能。
-
-
应用场景:
-
WIoU被应用于最先进的实时检测器YOLOv7上,在MS-COCO数据集上的AP75从53.03%提高到54.50%。
-
具体实现
在具体实现上,WIoU通过以下步骤来优化BBR损失:
-
生成离群度:计算每个anchor box的离群度,作为衡量其质量的指标。
-
分配梯度增益:根据离群度动态调整梯度增益。对高质量和低质量的anchor box赋予较小的梯度增益,而对普通质量的anchor box赋予较大的梯度增益。
-
损失计算:结合IoU损失和聚焦机制计算最终的WIoU损失。
论文中的具体实现细节
根据论文内容,WIoU的公式和实现细节如下:
-
IoU损失公式:
其中,Wi 和 Hi 分别是重叠区域的宽度和高度, Su 是联合区域的面积。
-
离群度计算:
-
梯度增益分配: 动态非单调聚焦机制根据离群度分配梯度增益,减少高质量和低质量样本对模型的不利影响。
WIoU的主要贡献在于引入了动态的非单调聚焦机制,使得模型能够更加有效地处理普通质量的anchor box,从而提高了边界框回归的性能。

2.2 代码实现
class WIoU_Scale:''' monotonous: {None: origin v1True: monotonic FM v2False: non-monotonic FM v3}momentum: The momentum of running mean'''iou_mean = 1.monotonous = False_momentum = 1 - 0.5 ** (1 / 7000)_is_train = Truedef __init__(self, iou):self.iou = iouself._update(self)@classmethoddef _update(cls, self):if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \cls._momentum * self.iou.detach().mean().item()@classmethoddef _scaled_loss(cls, self, gamma=1.9, delta=3):if isinstance(self.monotonous, bool):if self.monotonous:return (self.iou.detach() / self.iou_mean).sqrt()else:beta = self.iou.detach() / self.iou_meanalpha = delta * torch.pow(gamma, beta - delta)return beta / alphareturn 13. 将EIoU、SIoU、WIoU、DIoU、FocusIoU添加到YOLOv5中
3.1 添加代码
关键步骤一: 在
utils/metrics.py中,找到bbox_iou函数,可以把原有的注释掉,换成下面的代码:
class WIoU_Scale:''' monotonous: {None: origin v1True: monotonic FM v2False: non-monotonic FM v3}momentum: The momentum of running mean'''iou_mean = 1.monotonous = False_momentum = 1 - 0.5 ** (1 / 7000)_is_train = Truedef __init__(self, iou):self.iou = iouself._update(self)@classmethoddef _update(cls, self):if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \cls._momentum * self.iou.detach().mean().item()@classmethoddef _scaled_loss(cls, self, gamma=1.9, delta=3):if isinstance(self.monotonous, bool):if self.monotonous:return (self.iou.detach() / self.iou_mean).sqrt()else:beta = self.iou.detach() / self.iou_meanalpha = delta * torch.pow(gamma, beta - delta)return beta / alphareturn 1def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False, Focal=False,alpha=1, gamma=0.5, scale=False, eps=1e-7):# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)# Get the coordinates of bounding boxesif xywh: # transform from xywh to xyxy(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_else: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)# Intersection areainter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)# Union Areaunion = w1 * h1 + w2 * h2 - inter + epsif scale:self = WIoU_Scale(1 - (inter / union))# IoU# iou = inter / union # ori iouiou = torch.pow(inter / (union + eps), alpha) # alpha iouif CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squaredrho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha_ciou = v / (v - iou + (1 + eps))if Focal:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter / (union + eps),gamma) # Focal_CIoUelse:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = torch.pow(cw ** 2 + eps, alpha)ch2 = torch.pow(ch ** 2 + eps, alpha)if Focal:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter / (union + eps),gamma) # Focal_EIouelse:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIouelif SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + epss_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)if Focal:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter / (union + eps), gamma) # Focal_SIouelse:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIouelif WIoU:if Focal:raise RuntimeError("WIoU do not support Focal.")elif scale:return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp((rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051else:return iou, torch.exp((rho2 / c2)) # WIoU v1if Focal:return iou - rho2 / c2, torch.pow(inter / (union + eps), gamma) # Focal_DIoUelse:return iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areaif Focal:return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter / (union + eps),gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdfelse:return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdfif Focal:return iou, torch.pow(inter / (union + eps), gamma) # Focal_IoUelse:return iou # IoU
3.2 回调函数
关键步骤二:在
utils/loss.py中,找到ComputeLoss类中的__call__()函数,把Regression loss中计算iou的代码,换成下面这句:

iou = bbox_iou(pbox, tbox[i], WIoU=True)if type(iou) is tuple:if len(iou) == 2:lbox += (iou[1].detach().squeeze() * (1 - iou[0].squeeze())).mean()iou = iou[0].squeeze()else:lbox += (iou[0] * iou[1]).mean()iou = iou[2].squeeze()else:lbox += (1.0 - iou.squeeze()).mean() # iou lossiou = iou.squeeze()4.完整代码分享
https://pan.baidu.com/s/16E9eva_mm6rHPaTOAyZ5uA?pwd=i3ba提取码:i3ba
5. 进阶
可以融合其他的注意力机制,修改backbone以及neck,多个模块进行改进。
6. 总结
WIoU(Wise-IoU)通过引入动态非单调聚焦机制来优化边界框回归损失。具体而言,它根据锚框的离群度(outlier degree)来分配梯度增益,离群度越高的锚框被认为质量越差,因此分配较小的梯度增益,而离群度较低的高质量锚框也分配较小的梯度增益。这种机制使得模型能够专注于普通质量的锚框,减少高质量和低质量样本对模型训练的负面影响,从而提高目标检测中的边界框定位精度和整体性能。
相关文章:
YOLOv5改进 | 损失函数 | EIoU、SIoU、WIoU、DIoU、FocuSIoU等多种损失函数
秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转 💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 专栏目录: 《YOLOv5入门 …...
[leetcode]minimum-absolute-difference-in-bst 二叉搜索树的最小绝对差
. - 力扣(LeetCode) /*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* TreeNode() : val(0), left(nullptr), right(nullptr) {}* TreeNode(int x) : val(x), left(null…...

[ALSA]从零开始,使用ALSA驱动播放一个音频
前言 最近学了不少有关音频相关的,最近搞一下ALSA驱动 安装 参考Linux应用开发【第八章】ALSA应用开发 中提到的ALSA库及工具章节,本文中有比较详细的有关ALSA驱动引用程序怎么安装的,这里不再赘述。 关于ALSA,就当成一个音频…...

自动化设备上位机设计 一
目录 一 设计原型 二 后台代码 一 设计原型 二 后台代码 namespace 自动化上位机设计 {public partial class Form1 : Form{public Form1(){InitializeComponent();}private void Form1_Load(object sender, EventArgs e){}} }namespace 自动化上位机设计 {partial class Fo…...
tampermonkey插件下载国家标准文件
#创作灵感# 最近在一个系统招标正文中看到了一些国家标准,想要把文章下载下来,方便查阅,但是“国家标准全文公开系统”网站只提供了在线预览功能,没有提供下载功能,但是公司又需要文件,在网上找了一些办法&…...

JAVA学习笔记2
一、加号使用 二、数据类型 bit:计算机中的最小存储单位 byte(字节):计算机中基本存储单元,1byte8bit 浮点数符号位指数位尾数位 浮点数默认为double类型...
Unity 解包工具(AssetStudio/UtinyRipper)
文章目录 1.UtinyRipper2.AssetStudio 1.UtinyRipper 官方地址: https://github.com/mafaca/UtinyRipper/ 下载步骤: 2.AssetStudio 官方地址: https://github.com/Perfare/AssetStudio 下载步骤:...
log4j2 对定时异步线程打印的日志进行过滤
log4j2的过滤器有: 官网:Log4j – Log4j Filters (apache.org) 本次不使用自定义的过滤器,使用ScriptFilter对logevent对象中的线程名称进行过滤。 具体修改如下: <!--控制台--><Console name"Console" tar…...

Oracle内部bug导致的19c DG备库宕机
Oracle内部bug导致的19c DG备库宕机 报错信息收集原因与受影响版本Workaround与解决办法报错信息收集 数据库版本: SQL> select banner,banner_full,banner_legacy from v$version;BANNER ----------------------------------------------------------------------------…...

2024 世界人工智能大会暨人工智能全球治理高级别会议全体会议在上海举办,推动智能向善造福全人类
2024 年 7 月 4 日,2024 世界人工智能大会暨人工智能全球治理高级别会议-全体会议在上海世博中心举办。联合国以及各国政府代表、专业国际组织代表,全球知名专家、企业家、投资家 1000 余人参加了本次会议,围绕“以共商促共享,以善…...

【算法专题--栈】用栈实现队列 -- 高频面试题(图文详解,小白一看就懂!!)
目录 一、前言 二、题目描述 三、解题方法 ⭐双栈 模拟 队列 🥝栈 和 队列 的特性 🍍具体思路 🍍案例图解 四、总结与提炼 五、共勉 一、前言 用栈实现队列 这道题,可以说是--栈专题--,最经典的一道题&…...

2024亚太杯中文赛B题全保姆教程
B题 洪水灾害的数据分析与预测 问题 1. 请分析附件 train.csv 中的数据,分析并可视化上述 20 个指标中,哪 些指标与洪水的发生有着密切的关联?哪些指标与洪水发生的相关性不大?并 分析可能的原因,然后针对洪水的提前预…...

穿越光影,共赏中华瑰宝——皮影戏文化交流盛会
2024年7月3日,皮影不离团队的成员非常荣幸能与外国语学院的同学以及留学生一同探索中国古老而迷人的艺术形式——皮影戏。皮影戏,源自中国民间,距今已有数千年的历史,它不仅是光与影的魔术,更是文化传承的活化石。 在这…...

SQL常用经典语句大全
SQL经典语句大全 一、基础 1、说明:创建数据库 CREATE DATABASE database-name 2、说明:删除数据库 drop database dbname 3、说明:备份sql server — 创建 备份数据的 device USE master EXEC sp_addumpdevice ‘disk’, ‘testBack’, ‘c:…...
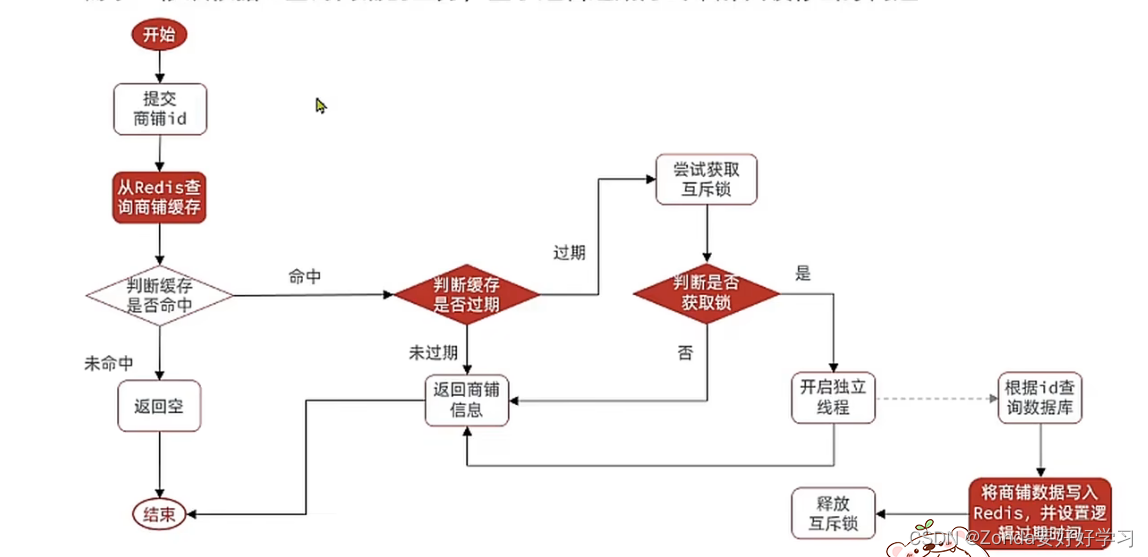
黑马点评DAY5|商户查询缓存
商户查询缓存 缓存的定义 缓存就是数据交换的缓冲区(Cache),是存储数据的临时地方,一般读写性能较高。 比如计算机的CPU计算速度非常快,但是需要先从内存中读取数据再放入CPU的寄存器中进行运算,这样会限…...

Owl 中的 Props 概述
在动态的 Web 开发环境中,创建模块化和可重用组件对于构建可扩展应用程序至关重要。将这种方法提升到新水平的一个框架是 Owl,其中“props”(属性的缩写)的概念在协调父组件和子组件之间的通信中起着关键作用。在 Owl 框架中&…...

【大数据综合试验区1008】揭秘企业数字化转型:大数据试验区政策数据集大公开!
今天给大家分享的是国内顶级期刊中国工业经济2023年发布的最新期刊《政策赋能、数字生态与企业数字化转型——基于国家大数据综合试验区的准自然实验》文章中所使用到的数据集——国家大数据综合试验区政策数据集以及工具变量数据,该文章基于2009-2019年中国上市企业…...

在 WebGPU 与 Vulkan 之间做出正确的选择(Making the Right Choice between WebGPU vs Vulkan)
在 WebGPU 与 Vulkan 之间做出正确的选择(Making the Right Choice between WebGPU vs Vulkan) WebGPU 和 Vulkan 之间的主要区别WebGPU 是什么?它适合谁使用?Vulkan 是什么?它适合谁使用?WebGPU 和 Vulkan…...
亚马逊云服务器的价格真的那么贵吗?一年要花多少钱?
亚马逊Web服务(AWS)作为全球领先的云计算平台,其定价策略常常引起用户的关注。很多人可能会问:"AWS真的那么贵吗?"实际上,这个问题的答案并不是简单的"是"或"否",…...

Python学习篇:Python基础知识(三)
目录 1 Python保留字 2 注释 3 行与缩进 编辑4 多行语句 5 输入和输出 6 变量 7 数据类型 8 类型转换 9 表达式 10 运算符 1 Python保留字 Python保留字(也称为关键字)是Python编程语言中预定义的、具有特殊含义的标识符。这些保留字不能用作…...

AX-MES生产制造管理系统-总览
前言说起 MES 就不得不说 ERP,但是 ERP 大家基本上都知道,MES 就不一定了,常见的 ERP 系统包括 SAP、金蝶、用友等,ERP的流程相对来说也比较统一;MES就不同了,基本上熟悉业务流程的软件公司都可以开发并实施…...

Python基础语法:访问器@property和修改器@xxx.setter
一、简介 访问器和修改器也是装饰器的一种。 property: 访问器,getter xxx.setter: 修改器,setter 访问器和修改器的根本目的是想将属性私有化,提供getter&setter去访问。 访问器和修改器能够做到访问属性其实在调用getter方法࿰…...
实战选型指南)
别再乱用分支了!Flowable四种网关(排他/并行/包容/事件)实战选型指南
Flowable四大网关实战选型:从混乱到精准的决策艺术当你在设计一个请假审批流程时,是否遇到过这样的困惑:部门经理审批后需要同时通知HR和财务,但某些特殊情况下又需要跳过财务直接归档?这种看似简单的业务需求…...

6款高效降AI率工具 改写实力出众
写论文时反复检测出的AI痕迹总让你提心吊胆?别担心,这里整理了6款真正好用的论文降AI率工具,堪称应对AI生成特征的“得力助手”。它们能有效识别并消除AI生成的痕迹,改写能力出众,帮你快速降低查重率,顺利通…...

VMware ESXi 9.1.0.0集成NVME+网卡驱动版发布|新特性+驱动集成+部署升级+FAQ全指南
一、ESXi 9.1.0.0 正式版核心新特性 VMware ESXi 9.1.0.0(2026 年 5 月发布)是 vSphere 9.1 核心组件,聚焦硬件兼容扩展、性能跃升、安全加固、运维简化四大方向,重点强化 NVMe 存储与网卡生态适配,以下为关键更新&am…...

GEO生成引擎优化:当AI成为信息分发的主角,品牌如何抢占对话窗口?
当用户不再"搜索-浏览",而是直接"AI提问-获取答案",传统SEO的逻辑正在被彻底改写。2026年,GEO(Generative Engine Optimization,生成式引擎优化)已经从概念走向规模化落地。本文从技术…...

C++ vector容器总结
vector基本概念功能:vector数据结构和数组非常相似,也称为单端数组vector与普通数组区别:不同之处在于数组是静态空间,而vector可以动态扩展动态扩展:并不是在原空间之后续接新空间,而是找更大的内存空间&a…...

终极Node.js Mock工具:Mockery入门到精通实战教程
终极Node.js Mock工具:Mockery入门到精通实战教程 【免费下载链接】mockery Simplifying the use of mocks with Node.js 项目地址: https://gitcode.com/gh_mirrors/mock/mockery Mockery是Node.js生态中简化Mock使用的终极工具,它为开发者提供了…...

ubuntu环境下为python项目配置taotoken多模型api密钥与端点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Ubuntu环境下为Python项目配置Taotoken多模型API密钥与端点 1. 准备工作 在Ubuntu系统上为Python项目接入Taotoken,首…...

Java网络编程基础分享
在学习 Java 的过程中,网络编程是非常重要的一环。无论是后端开发、分布式系统、即时通讯、文件传输,还是游戏服务、物联网设备,都离不开网络通信一、计算机网络基础1.1 什么是计算机网络把不同地理位置、具有独立功能的计算机,通…...