目标检测算法
讯飞星火
目标检测算法是计算机视觉领域的一项核心技术,用于在数字图像或视频中识别和定位一个或多个特定对象实例。这些算法通常需要确定对象的位置(例如通过边界框)和类别(例如人、汽车、狗等)。以下是一些流行的目标检测算法:
-
R-CNN系列:
- R-CNN (Regions with CNN features):使用选择性搜索方法提取区域建议,然后将每个区域提议通过预训练的CNN来提取特征,并用SVM分类器对每个类别进行分类。最后使用回归模型精化边界框位置。
- Fast R-CNN:改进了R-CNN的训练和推断过程,使特征提取只发生一次,然后同时进行边框回归和分类,显著提高了处理速度。
- Faster R-CNN:引入了区域提议网络(RPN),直接在CNN上预测对象边界框,进一步提高了速度和准确性。
-
YOLO系列:
- YOLO (You Only Look Once):将目标检测作为回归问题解决,直接在图像上预测类别和边界框。由于其单个前向传播的特点,YOLO非常快,但早期版本的精准度有限。
- YOLOv2, YOLOv3, YOLOv4:这些后续版本通过引入新的网络架构、多尺度检测、锚点框等改进,不断提高YOLO系列的准确率和速度。
-
SSD (Single Shot MultiBox Detector):
- 与YOLO相似,SSD在单个前向传递中同时预测类别和边界框,但它利用了不同分辨率的特征图来检测不同大小的物体,从而提高了对小物体的检测能力。
-
RetinaNet:
- 提出了一种新的损失函数,Focal Loss,以解决类别不平衡问题。RetinaNet使用FPN(特征金字塔网络)来处理不同尺寸的物体,并集成了一种新的焦点损失来提高性能。
-
EfficientDet:
- 结合了EfficientNet(一种高效的图像分类网络)和BiFPN(双向特征金字塔网络),并使用了一种新的加权双向平滑L1损失函数。EfficientDet旨在提供更快、更准确的目标检测。
总之,目标检测算法的选择取决于特定的应用场景需求,包括精度、速度、模型大小和部署的便利性。随着技术的进步,这些算法不断演化,以提高性能和适应不同的应用需求。

deepseek
目标检测算法是计算机视觉领域的一个重要分支,它的主要任务是在图像或视频中识别和定位出感兴趣的对象。目标检测算法通常需要完成两个主要任务:分类和定位。分类任务是确定图像中每个对象的类别,而定位任务是确定每个对象在图像中的位置和大小。
目标检测算法可以分为两大类:
-
基于区域提议的方法(Region Proposal-based Methods):
这类方法首先生成可能包含对象的候选区域(Region Proposals),然后对这些区域进行分类和边界框回归。经典的算法包括:-
R-CNN(Regions with CNN features):使用选择性搜索(Selective Search)生成候选区域,然后对每个区域使用卷积神经网络(CNN)提取特征,最后使用支持向量机(SVM)进行分类和线性回归进行边界框调整。
-
Fast R-CNN:改进了R-CNN,通过共享卷积特征图来加速计算,并使用多任务损失函数同时进行分类和边界框回归。
-
Faster R-CNN:引入了区域提议网络(Region Proposal Network, RPN),直接在卷积特征图上生成候选区域,大大提高了速度和准确性。
-
-
单阶段检测器(Single-stage Detectors):
这类方法不使用区域提议步骤,而是直接在图像上预测对象的类别和位置。它们通常更快,但有时可能在准确性上稍逊于两阶段方法。代表性的算法包括:-
YOLO(You Only Look Once):将目标检测任务视为一个回归问题,直接在图像上预测边界框和类别概率。
-
SSD(Single Shot MultiBox Detector):结合了YOLO的速度优势和Faster R-CNN的准确性,通过在不同尺度的特征图上进行预测来检测不同大小的对象。
-
RetinaNet:引入了Focal Loss来解决类别不平衡问题,提高了小目标的检测性能。
-
目标检测算法的关键技术包括:
-
卷积神经网络(CNN):用于提取图像特征。
-
锚框(Anchor Boxes):预定义的边界框,用于初始化预测。
-
非极大值抑制(Non-Maximum Suppression, NMS):用于去除重叠的检测框。
-
边界框回归(Bounding Box Regression):用于调整预测框的位置和大小。
-
多尺度检测:在不同尺度的特征图上进行预测,以检测不同大小的对象。
随着深度学习技术的发展,目标检测算法的速度和准确性都在不断提升,应用场景也越来越广泛,包括自动驾驶、视频监控、机器人视觉等。

Kimi
目标检测算法是计算机视觉领域中用于识别和定位图像中一个或多个目标的算法。这些算法能够确定目标的类别,并通常以边界框(bounding boxes)的形式提供目标的位置信息。以下是一些常见的目标检测算法:
-
传统目标检测算法:
- 基于特征的方法,如SIFT(尺度不变特征变换)和HOG(方向梯度直方图)。
- 使用滑动窗口和特征提取来识别图像中的目标。
-
R-CNN(Region-based Convolutional Neural Network):
- 通过选择性搜索提取候选区域,然后使用CNN对每个区域进行分类和边界框回归。
-
Fast R-CNN:
- 改进了R-CNN,通过ROI池化层同时提取特征,提高了效率。
-
Faster R-CNN:
- 引入区域建议网络(Region Proposal Network, RPN),用于快速生成候选区域,进一步提高了检测速度。
-
YOLO(You Only Look Once):
- 将目标检测视为回归问题,直接在图像上预测边界框和类别概率,实现快速检测。
-
SSD(Single Shot MultiBox Detector):
- 类似于YOLO,SSD通过在不同尺度的特征图上预测边界框和类别概率,能够检测不同大小的目标。
-
RetinaNet:
- 使用特征金字塔网络(FPN)和焦点损失(Focal Loss)来提高小目标的检测性能。
-
Mask R-CNN:
- 在Faster R-CNN的基础上增加了一个分支,用于生成目标的掩码,实现实例分割。
-
Corner Proposal Networks:
- 专注于检测目标的角落,而不是边界框,用于更精确的目标定位。
-
DEtection TRansformer (DETR):
- 引入了Transformer架构,将目标检测视为集合预测问题,不依赖于锚框或手工设计的特征。
目标检测算法的选择取决于特定应用的需求,包括检测速度、准确性、对不同目标大小的敏感性以及计算资源的限制。随着深度学习技术的发展,基于深度神经网络的目标检测算法已成为主流,它们在各种标准数据集上取得了显著的性能提升。

腾讯元宝
目标检测(Object Detection)是计算机视觉领域的一个重要研究方向,旨在让计算机能够识别图像或视频中的物体并给出其位置
-
R-CNN系列:
- R-CNN(Region-based Convolutional Neural Networks):通过Selective Search提取候选区域,然后使用CNN提取特征,最后进行分类和定位。
- Fast R-CNN:使用ROI Pooling层加速特征提取过程,提高了检测速度。
- Faster R-CNN:引入RPN(Region Proposal Network),实现了端到端的候选区域生成,进一步提高了检测速度。
-
YOLO系列:
- YOLO(You Only Look Once):采用单个卷积神经网络同时进行检测和分类,极大地提高了检测速度。
- YOLOv2:改进了YOLO的网络结构,引入了Batch Normalization和锚点框,提高了检测精度。
- YOLOv3:进一步优化了网络结构,引入了多尺度检测,提高了对小目标和遮挡目标的检测能力。
-
SSD(Single Shot MultiBox Detector):结合了YOLO的快速速度和R-CNN的高精度,通过多层特征图进行目标检测,实现了较好的性能和速度平衡。
-
RetinaNet:采用Focal Loss解决类别不平衡问题,通过多层特征图进行目标检测,具有较高的检测精度。
-
EfficientDet:通过引入BiFPN(Bidirectional Feature Pyramid Network)和Densely Connected CNN,实现了较高的检测精度和速度。
这些算法各有优缺点,适用于不同的应用场景。在实际应用中,可以根据需求选择合适的算法进行目标检测任务。

豆包
目标检测算法是计算机视觉领域中的重要研究方向,其目的是在图像或视频中准确地定位和识别出感兴趣的目标对象,并给出其边界框和类别信息。以下为您介绍一些常见的目标检测算法:
- R-CNN(Region-based Convolutional Neural Network):使用选择性搜索算法生成候选区域,然后对每个候选区域使用卷积神经网络提取特征,最后用支持向量机进行分类和边界框回归。
- Fast R-CNN:在 R-CNN 的基础上,将整张图像输入卷积神经网络进行特征提取,然后对每个候选区域在特征图上进行映射和池化操作,从而避免了对每个候选区域单独进行特征提取,提高了计算效率。
- Faster R-CNN:引入区域生成网络(RPN)来生成候选区域,与检测网络共享卷积特征,进一步提高了检测速度和精度。
- YOLO(You Only Look Once):将目标检测任务视为一个回归问题,直接在图像上划分网格,每个网格预测多个边界框及其类别概率,实现了端到端的实时检测。
- SSD(Single Shot MultiBox Detector):通过卷积神经网络进行特征提取,在不同的特征层上设置不同大小和比例的先验框,同时进行分类和位置回归,实现了单阶段的快速检测。
- RetinaNet:通过引入焦点损失函数来解决类别不平衡问题,提高了对稀有类别的检测性能。
这些算法不断发展和改进,在准确性、速度和适应性等方面都取得了显著的成果,并在许多实际应用中得到了广泛的应用,如自动驾驶、安防监控、工业检测等。

通义千问
目标检测(Object Detection)是计算机视觉领域的一个核心问题,旨在识别图像或视频中的多个实例,并为每个实例定位出其位置,通常以边界框的形式给出。近年来,基于深度学习的目标检测算法取得了显著进展,以下是一些广泛使用和研究的目标检测算法:
1. R-CNN系列
R-CNN系列包括了R-CNN、Fast R-CNN、Faster R-CNN等算法,它们基于候选区域(Region Proposal)的思想。其中,Faster R-CNN引入了区域提议网络(Region Proposal Network, RPN),大大提高了检测速度。
2. YOLO系列
YOLO (You Only Look Once) 是一种实时目标检测框架,其核心思想是将目标检测视为一个回归问题,直接从全图像上预测边界框和类别概率,因此具有较快的速度。YOLO系列包括YOLOv1、YOLOv2、YOLOv3、YOLOv4以及YOLOv5等版本。
3. SSD (Single Shot MultiBox Detector)
SSD在全卷积网络的基础上,使用不同尺度的特征图来检测不同大小的目标,同时在每个位置上预测多个边界框,适用于多尺度目标检测。
4. Mask R-CNN
Mask R-CNN是在Faster R-CNN基础上的扩展,不仅能够检测目标的位置,还能预测目标的分割掩码,用于实例分割任务。
5. RetinaNet
RetinaNet针对“前景背景不平衡”问题提出了焦点损失(Focal Loss),改善了小目标的检测效果。
6. EfficientDet
EfficientDet结合了网络架构搜索(NAS)技术,设计了高效且可缩放的网络结构,实现了高精度与高速度的平衡。
7. CenterNet
CenterNet利用关键点估计的思想进行目标检测,直接回归目标的中心点和大小,避免了复杂的后处理过程。
8. DETR (DEtection TRansformer)
DETR是基于Transformer架构的目标检测模型,采用端到端的方式,直接输出目标的类别和位置,但计算成本较高。
9. FCOS (Fully Convolutional One-Stage Object Detection)
FCOS是一个单阶段的检测器,类似于SSD和YOLO,但使用了无锚点的设计,简化了模型结构。
10. Grid R-CNN
Grid R-CNN改进了传统的R-CNN系列,使用网格细化策略来提高边界框的精度。
11. CornerNet
CornerNet利用检测目标框的两个对角点(即左上角和右下角)来定位目标,提供了一种新颖的检测方式。
12. Sparse R-CNN
Sparse R-CNN是最近提出的一种动态、可学习的区域提议方法,减少了对预定义先验框的依赖。
这些算法各有特点,适用于不同的应用场景。例如,YOLO和SSD适合对实时性要求高的场景;而Faster R-CNN和Mask R-CNN在精度上有优势,但速度相对较慢,适合对检测精度要求较高的应用。随着硬件和算法的发展,未来的目标检测算法将更加高效、准确。

Claude3 Opus
目标检测算法是计算机视觉领域中常用的算法之一,用于在图像或视频中识别和定位特定对象的位置。以下是几种常见的目标检测算法:
1. R-CNN(Region-based Convolutional Neural Networks)系列:包括R-CNN、Fast R-CNN、Faster R-CNN。这些算法使用候选区域生成方法(如选择性搜索Selective Search)提取图像中的候选目标区域,然后使用卷积神经网络(CNN)对每个候选区域进行分类和位置回归。
2. YOLO(You Only Look Once)系列:包括YOLO、YOLOv2、YOLOv3、YOLOv4等。YOLO算法将目标检测任务转化为一个回归问题,通过单次前向传递网络同时预测图像中所有目标的类别和位置信息。
3. SSD(Single Shot MultiBox Detector):SSD算法是一种基于卷积神经网络的目标检测算法,可以在单次前向传递中检测图像中的多个目标,包括不同尺度和宽高比的目标。
4. RetinaNet:RetinaNet算法通过引入一种称为Focal Loss的损失函数,解决了目标检测算法中正负样本不平衡问题。该算法在同时保持准确率和召回率的情况下,能够检测小目标。
5. EfficientDet:EfficientDet是一种高效的目标检测算法,它基于EfficientNet网络结构,通过使用一系列特征金字塔网络和轻量级的检测头,实现了更高的检测精度和更低的计算开销。
这些算法都在目标检测领域取得了较好的效果,并且都有对应的开源实现和预训练模型可以使用。选择合适的目标检测算法需要根据具体的场景要求、数据集特点和计算资源等因素进行权衡。

GPT-3.5 (OpenAI)
目标检测是计算机视觉中的一个重要任务,即在图像或视频中检测出特定类别的物体,并对其进行定位和分类。以下是一些目前比较流行的目标检测算法:
1. R-CNN(Region-based Convolutional Neural Network)系列算法:包括 R-CNN、Fast R-CNN、Faster R-CNN、Mask R-CNN,这些算法都是以区域建议网络 (RPN) 作为基础,使用卷积神经网络进行特征提取和分类。
2. YOLO(You Only Look Once)系列算法:包括 YOLOv1、YOLOv2、YOLOv3,这些算法使用单个神经网络同时进行目标检测和分类,优点是速度快,但精度不如 R-CNN 系列算法。
3. SSD(Single Shot MultiBox Detector)算法:从概念上来说,与 YOLO 系列方法相似,使用单个神经网络同时实现物体检测和分类,但它使用不同的方式来预测各个位置处的物体边界框和类别概率。
4. RetinaNet:一种单阶段、基于特征金字塔的目标检测算法,它使用特别设计的损失函数来解决目标检测中的分级不平衡现象,同时既可以精确地检测大物体,也能在小物体上实现高召回率。
以上算法各有特点和优缺点,实际应用中应根据具体场景和需求进行选择。

GPT-4o (OpenAI)
目标检测(Object Detection)是一种计算机视觉任务,旨在识别和定位图像或视频中的物体。目标检测算法的目的不仅仅是分类出图像中的物体类别,还要在图像中找到这些物体的位置,通常用边界框(Bounding Box)来表示。下面是一些主要的目标检测算法和相关方法:
### 1. 传统方法
在深度学习普及之前,许多目标检测算法基于手工特征提取和传统的机器学习方法。
- **HOG(Histogram of Oriented Gradients)**: HOG特征描述子是一种用于物体检测的特征提取方法,常与线性SVM分类器结合使用。
- **DPM(Deformable Part Models)**: 这种方法通过将物体分解为多个部分并检测这些部分来完成目标检测。
### 2. 基于深度学习的方法
基于深度学习的目标检测算法近年来取得了巨大的进展,主要分为两阶段方法和单阶段方法。
#### 两阶段方法(Two-Stage Detectors)
这些方法首先生成一组候选区域(region proposals),然后在这些区域中进行分类和回归,以确定物体的类别和边界框位置。
- **R-CNN(Region-based Convolutional Neural Networks)**:
- **R-CNN**: 通过选择性搜索(Selective Search)生成候选区域,然后使用CNN对每个候选区域进行特征提取,最后用分类器进行分类。
- **Fast R-CNN**: 在R-CNN的基础上,直接在共享特征图上对候选区域(ROI)进行池化和分类,提高了效率。
- **Faster R-CNN**: 引入了区域建议网络(RPN),在CNN特征图上生成候选区域,进一步提高了检测速度和准确性。
#### 单阶段方法(Single-Stage Detectors)
这些方法通过一次性的预测物体的位置和类别,简化了检测过程,提高了检测速度。
- **YOLO(You Only Look Once)**: 直接在整张图像上进行物体检测,将图像划分为网格,每个网格预测一定数量的边界框和对应的类别,速度非常快。
- **YOLOv1, YOLOv2 (YOLO9000), YOLOv3, YOLOv4, YOLOv5**: 不断改进的YOLO系列,相比之前版本在速度和精度上有所提升。
- **SSD(Single Shot MultiBox Detector)**: 在不同的尺度上预测边界框,这样可以检测大小不同的物体,采用anchor boxes的策略。
- **RetinaNet**: 引入了Focal Loss,专门用于解决单阶段方法中的类别不平衡问题(前景物体通常比背景物体少)。
### 3. 最新进展
随着研究的深入,更多创新的目标检测算法不断涌现,一些最新的方法和改进包括:
- **Attention Mechanisms**: 结合注意力机制(如Self-Attention或Transformer)增强特征图中的重要特征。
- **Anchor-free Methods**: 摆脱了传统的anchor boxes,采用关键点检测或中心点检测,如CornerNet和CenterNet。
- **Transformers in Detection**: 最近,Transformer架构也在目标检测中取得了成功,例如DETR(DEtection TRansformers)。
### 4. 应用
目标检测在许多实际应用中都有重要作用,包括:
- 自动驾驶:检测道路上的车辆、行人、交通标志等。
- 安防监控:检测监控视频中的可疑行为或物体。
- 医学影像:检测和分类肿瘤、病变等医学影像中的异常。
- 人脸识别和分析:检测图像和视频中的人脸及其特征点。
总之,目标检测算法广泛应用于各个领域,不同算法适用于不同的场景和需求,你可以根据具体应用选择合适的方法。
相关文章:
目标检测算法
讯飞星火 目标检测算法是计算机视觉领域的一项核心技术,用于在数字图像或视频中识别和定位一个或多个特定对象实例。这些算法通常需要确定对象的位置(例如通过边界框)和类别(例如人、汽车、狗等)。以下是一些流行的目…...
SpringSecurity 三更草堂学习笔记
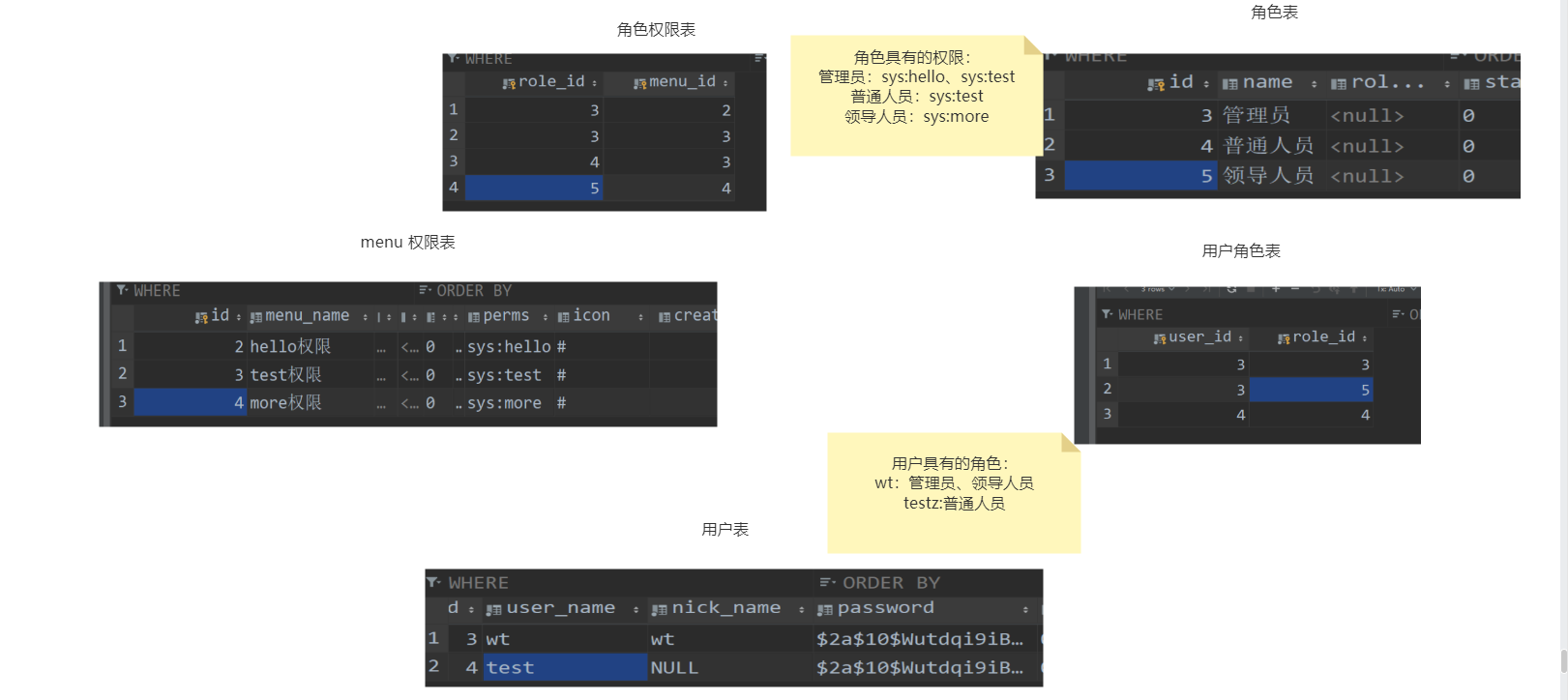
0.简介 Spring Security是Spring家族中的一个安全管理框架。相比与另外一个安全框架Shiro,它提供了更丰富的功能,社区资源也比Shiro丰富。 一般来说中大型的项目都是使用SpringSecurity来做安全框架。小项目有Shiro的比较多,因为相比与Spring…...

鸿蒙生态应用开发白皮书V3.0
来源:华为: 近期历史回顾:...
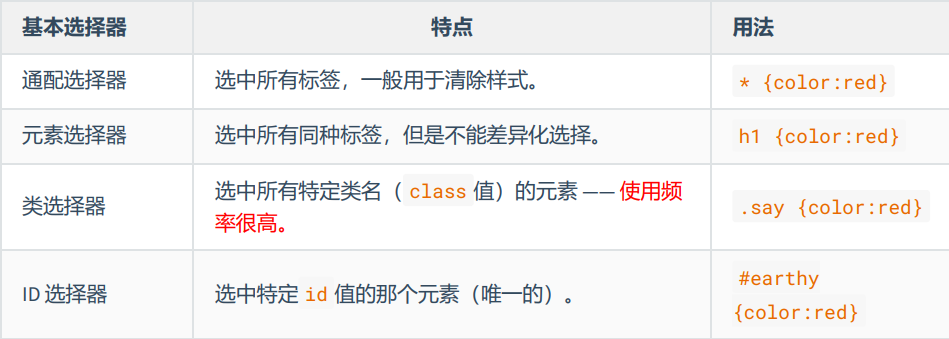
CSS - 深入理解选择器的使用方式
CSS基本选择器 通配选择器元素选择器类选择器id 选择器 通配选择器 作用:可以选中所有HTML元素。语法: * {属性名;属性值; }举例: /* 选中所有元素 */ * {color: orange;font-size: 40px; }在清除样式方面有很大作用 元素选择器…...

动手学深度学习(Pytorch版)代码实践 -循环神经网络-54~55循环神经网络的从零开始实现和简洁实现
54循环神经网络的从零开始实现 import math import torch from torch import nn from torch.nn import functional as F from d2l import torch as d2l import matplotlib.pyplot as plt import liliPytorch as lp# 读取H.G.Wells的时光机器数据集 batch_size, num_steps 32, …...

Python酷库之旅-第三方库Pandas(006)
目录 一、用法精讲 10、pandas.DataFrame.to_excel函数 10-1、语法 10-2、参数 10-3、功能 10-4、返回值 10-5、说明 10-6、用法 10-6-1、数据准备 10-6-2、代码示例 10-6-3、结果输出 11、pandas.ExcelFile类 11-1、语法 11-2、参数 11-3、功能 11-4、返回值 …...

智慧矿山:EasyCVR助力矿井视频多业务融合及视频转发服务建设
一、方案背景 随着矿井安全生产要求的不断提高,视频监控、数据传输、通讯联络等业务的需求日益增长。为满足矿井生产管理的多元化需求,提高矿井作业的安全性和效率,TSINGSEE青犀EasyCVR视频汇聚/安防监控综合管理平台,旨在构建一…...

Unix/Linux shell实用小程序1:生字本
前言 在日常工作学习中,我们会经常遇到一些不认识的英语单词,于时我们会打开翻译网站或者翻译软件进行查询,但是大部分工具没有生词本的功能,而有生字本的软件又需要注册登陆,免不了很麻烦,而且自己的数据…...

springboot2.7.6 集成swagger
在 Spring Boot 2.7.6 版本中集成 Swagger 的步骤相对直接,主要涉及添加依赖、编写配置以及在控制器中添加文档注解几个环节。 下面是集成 Swagger 的基本步骤: 1. 添加依赖 首先,在pom.xml文件中添加 Swagger 相关依赖。 对于 Spring Boot…...
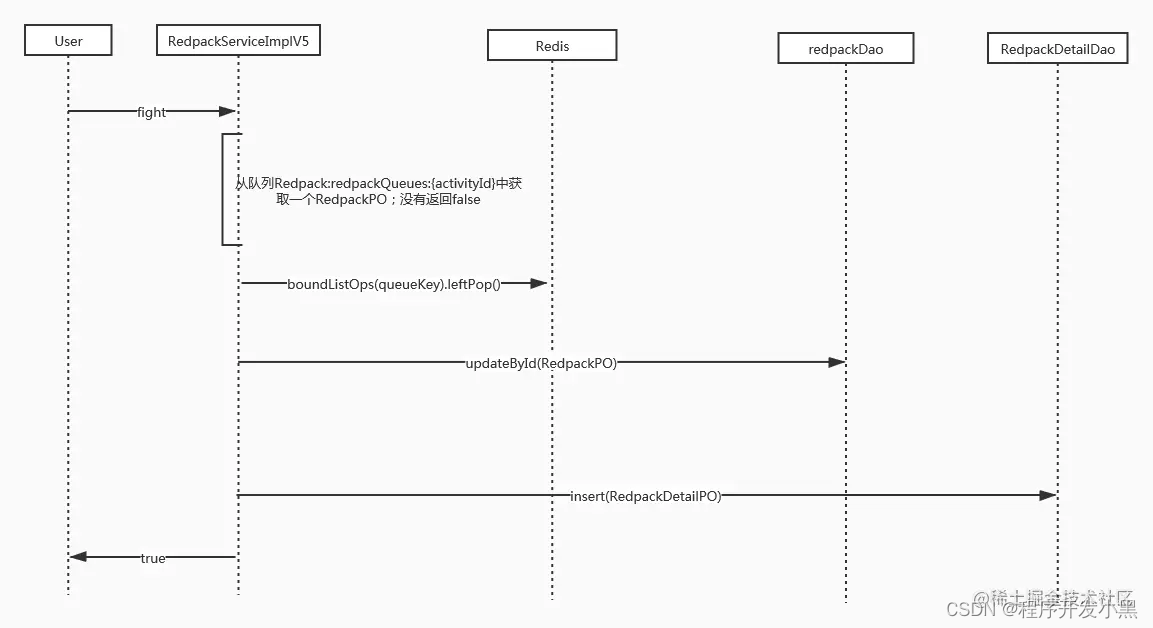
面试篇-系统设计题总结
文章目录 1、设计一个抢红包系统1.1 高可用的解决方案:1.2 抢红包系统的设计1.3 其他 2、秒杀系统设计 这里记录一些有趣的系统设计类的题目,一般大家比较喜欢出的设计类面试题目会和高可用系统相关比如秒杀和抢红包等。欢迎大家在评论中评论自己遇到的题…...

如何摆脱反爬虫机制?
在网站设计时,为了保证服务器的稳定运行,防止非法数据访问,通常会引入反爬虫机制。一般来说,网站的反爬虫机制包括以下几种: 1. CAPTCHA:网站可能会向用户显示CAPTCHA,要求他们在访问网站或执行…...

68745
877454...
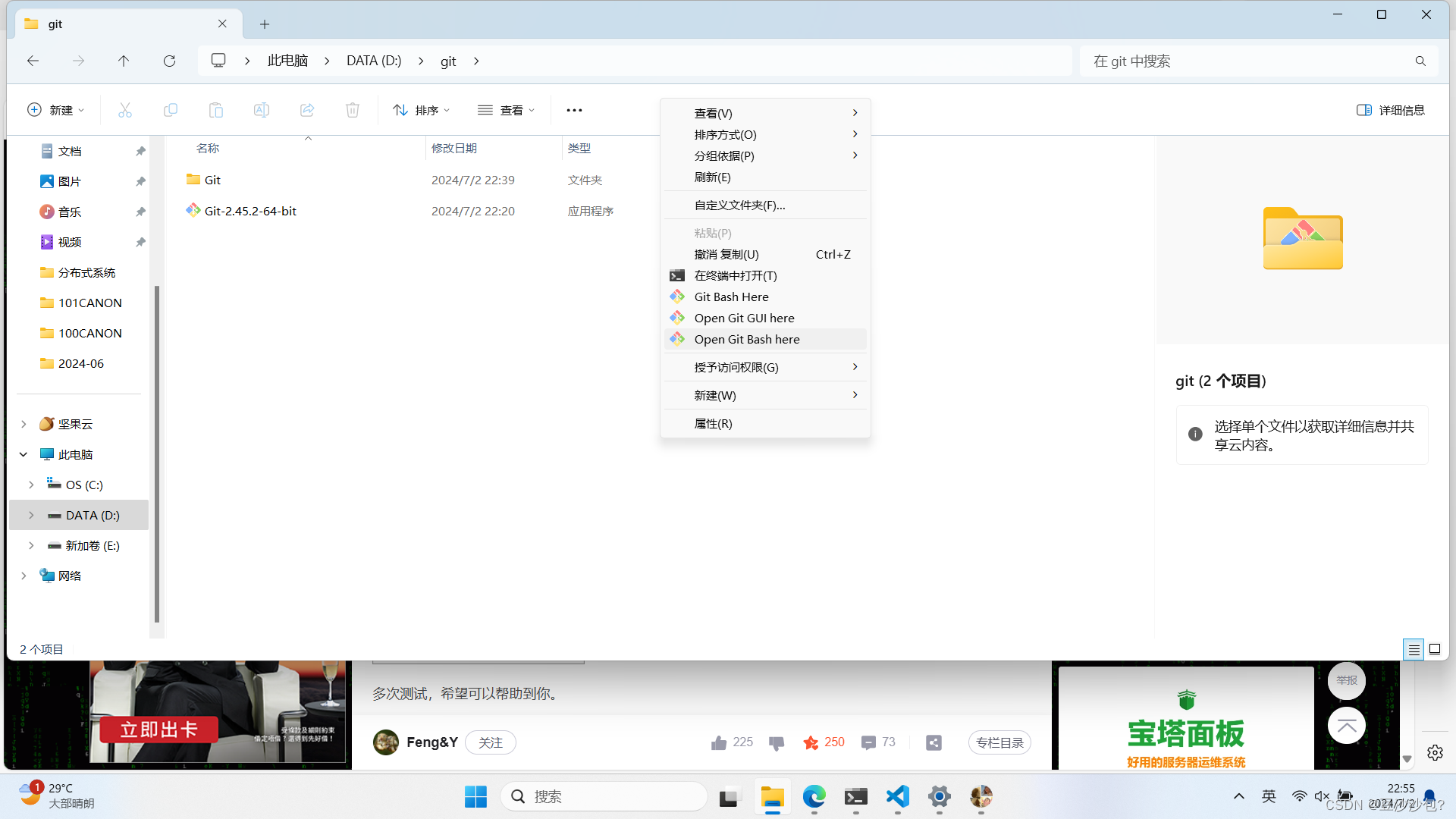
github仓库的基本使用-创建、上传文件、删除
1.第一步 先点击左侧菜单栏的远程仓库 2.点击NEW 3.创建仓库 然后点击右下角的 CREATE 4.点击code 点击SSH,然后我出现了You don’t have any public SSH keys in your GitHub account. You can add a new public key, or try cloning this repository via HTTPS. 1ÿ…...

[课程][原创]opencv图像在C#与C++之间交互传递
opencv图像在C#与C之间交互传递 课程地址:https://edu.csdn.net/course/detail/39689 无限期视频有效期 课程介绍课程目录讨论留言 你将收获 学会如何封装C的DLL 学会如何用C#调用C的DLL 掌握opencv在C#和C传递思路 学会如何配置C的opencv 适用人群 拥有C#…...
)
科研绘图系列:R语言双侧条形图(bar Plot)
介绍 双侧条形图上的每个条形代表一个特定的细菌属,条形的高度表示该属的LDA得分的对数值,颜色用来区分不同的分类群或组别,它具有以下优点: 可视化差异:条形图可以直观地展示不同细菌属在得分上的差异。强调重要性:较高的条形表示某些特征在区分不同组别中具有重要作用…...

计算机未来大方向的选择
选专业要了解自己的兴趣所在。 即想要学习什么样的专业,如果有明确的专业意向,就可以有针对性地选择那些专业实力较强的院校。 2.如果没有明确的专业意向,可以优先考虑一下院校。 确定一下自己想要选择综合性院校还是理工类院校或是像财经或者…...
AndroidKille不能用?更新apktool插件-cnblog
AndroidKiller不更新插件容易报错 找到apktool管理器 填入apktool位置,并输入apktool名字 选择默认的apktool版本 x掉,退出重启 可以看到反编译完成了...

非参数检测2——定义
定义:若研究二判定问题(即判断有无信号)的检测问题, 检测器的虚警概率可以由对输入数据统计特性提出微弱假设确定假设中不包含输入噪声的统计特性 则称该检测器为非参数检测器。 设计目标 在未知或时变环境下,有最…...

iOS多target时怎么对InfoPlist进行国际化
由于不同target要显示不同的App名称、不同的权限提示语,国际化InfoPlist文件必须创建名称为InfoPlist.strings的文件,那么多个target时怎么进行国际化呢?步骤如下: 一、首先我们在项目根目录创建不同的文件夹对应多个不同的targe…...
TZDYM001矩阵系统源码 矩阵营销系统多平台多账号一站式管理
外面稀有的TZDYM001矩阵系统源码,矩阵营销系统多平台多账号一站式管理,一键发布作品。智能标题,关键词优化,排名查询,混剪生成原创视频,账号分组,意向客户自动采集,智能回复…...

LLM API安全攻防实战:从提示词注入到自动化测试方案
1. 项目概述:被忽视的LLM API安全前线最近在帮几个团队做上线前的安全审计,发现一个挺有意思的现象:大家对于传统API的鉴权、限流、SQL注入这些常规检查已经形成了肌肉记忆,但一旦涉及到LLM(大语言模型)的A…...

【CP-05】RTE运行时环境 - SWC的操作系统接口
CP-05_RTE运行时环境【CP-05】RTE运行时环境 - SWC的“操作系统接口”前言在AUTOSAR架构中,RTE(Runtime Environment,运行时环境)是一个常被提及却难以理解的概念。它像是应用层软件组件(SW-C)与底层基础软…...

内存占用3KB!极致瘦身释放MCU无限可能
极致小体积,给工业领域带来了无限的可能:更低硬件成本,更小芯片体积,更低功耗,更高可靠性,让每一颗小MCU都拥有大系统的完整能力。 https://www.bilibili.com/video/BV1eZLi6PEjc/?spm_id_from333.1387.ho…...

Spring Security OAuth2 /oauth/token 401原因与Content-Type规范
1. 问题现场还原:一个看似简单却让开发停摆两小时的/oauth/token请求刚接手一个老项目做安全加固,第一件事就是验证OAuth2密码模式的token获取流程。我照着文档写了一条curl命令:curl -X POST http://localhost:8080/oauth/token回车执行&…...

为你的Hermes Agent自定义Provider,接入Taotoken多模型池
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为你的Hermes Agent自定义Provider,接入Taotoken多模型池 在构建复杂的AI应用时,开发者常常面临一个核心挑…...

榨干Codex!OpenAI工程师亲授Codex真正用法
你可能把 Codex 当编程助手用,改改代码,跑跑测试。但它的能力远不止于此。OpenAI 的客户支持工程师 Jason(jxnlco)告诉你,Codex 其实是一套完整的电脑工作系统,从语音输入到自动化,从浏览器操控…...

别再死记公式了!用Python手写一个卷积层,彻底搞懂CNN里的‘卷’是怎么算的
用Python手写卷积层:从零理解CNN的"卷"运算 当你第一次看到卷积神经网络(CNN)的数学公式时,那些复杂的符号和下标是否让你望而却步?作为计算机视觉领域的基石,CNN的核心在于理解卷积运算的本质。本文将带你用NumPy从零实…...

企业云盘签章技术方案:从数字签名原理到工程落地
背景 电子签章在企业云盘中的落地,不只是一个"上传盖章图片"的功能实现。本质上,它是一套涉及数字签名、PKI基础设施、文档完整性校验的综合性技术方案。本文从技术选型角度,说清楚企业云盘内置签章需要解决哪些问题、主流实现方案…...
)
【2025】AWVS安装保姆级教程(最新25.1.2可用)
【2025】AWVS安装保姆级教程(最新25.1.2可用) 文章目录 工具下载Host 重定向AWVS安装AWVS查看安装失败原因 工具下载 点击下载即可 下载完的工具后缀格式为.apk,需要将其改为.zip,然后将其解压得到以下工具后续安装使用 Host 重…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...