【电赛MSP430系列】GPIO、LED、按键、时钟、中断、串口、定时器、PWM、ADC
文章目录
- MSP430
- 一、GPIO
- 二、点亮LED
- 三、按键控制LED
- 四、更改主时钟
- 五、串口通信
- 六、串口中断
- 七、外部中断
- 八、定时器
- 九、定时器中断
- 十、PWM
- 十一、ADC
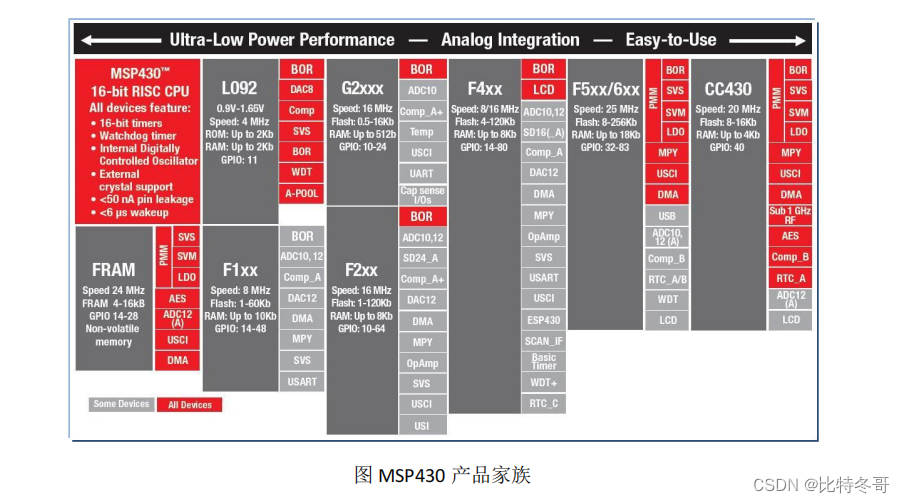
MSP430
MSP430 是德州仪器(TI)一款性能卓越的超低功耗 16 位单片机,自问世以来,MSP430 单片机一直是业内公认的功耗最低的单片机。除采用先进的制造工艺使芯片的静态电流尽可能降低外,MSP430 的独立可配置的时钟系统是其低功耗的基石之一。在追求绿色能源的今天,MSP430 超低功耗微控制器正以其超低功耗的特性,以及丰富多样化的外设受到越来越多设计者们的青睐。
一、GPIO
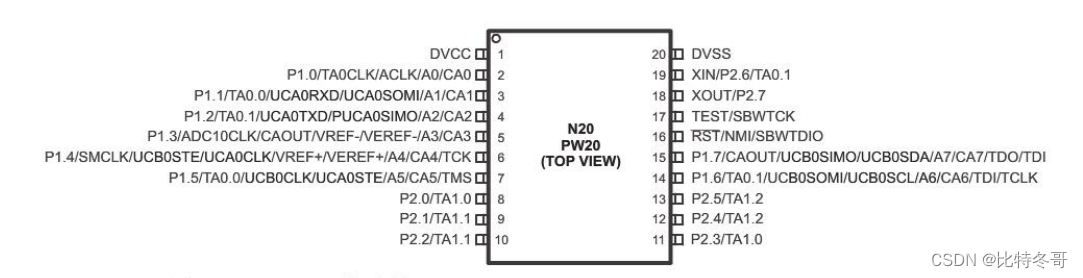
MSP430G2553共有两个通用数字端口P1和P2。
端口P1和 P2具有输入/输出\中断和外部模块功能,这些功能可以通过它们各自的7个控制寄存器的设置来实现。
- 1. PxDIR输入/输出方向寄存器
相互独立的8位分别定义了8个引脚的输入/输出方向.8位在PUC后都被复位。使用时先根据需要定义端口的方向以满足设计者要求。
0 : I/O引脚被切换成输入模式;
1 : IO引脚被切换成输出模式。
- 2. PxIN输入寄存器
输入寄存器是CPU扫描IO引脚信号的只读寄存器。通过读取该寄存器的内容获取IO端口的输入信号。此时引脚的方向必须选定为输入。读出时,该引脚的方向寄存器必须设置为输入模式。
- 3. PxOUT输出寄存器
该寄存器为IO端口的输出缓冲寄存器。其内容可以像操作内存数据一样写入,以达到改变IO口状态的目的。在读取时输出缓存的内容与引脚方向定义无关。改变方向寄存器的内容,输出缓存的内容不受影响。
- 4. PxIE中断使能寄存器
该寄存器的各引脚都有一位用以控制该引脚是否允许中断,该寄存器中0 :禁止该位中断;
1 :允许该位中断。
- 5. PxIES 中断触发沿选择寄存器
如果允许Px口的某个引脚中断,还需定义该引脚的中断触发沿。该寄存器的8位分别定义了Px口的8个引脚的中断触发沿。
0:上升沿使相应标志置位;
1:下降沿使相应标志置位。
- 6. PxIFG中断标志寄存器
该寄存器有8个标志位,它们含有相应引脚是否有待处理中断的信息,即
相应引脚是否有中断请求。如果Px的某个引脚允许中断,同时选择上升沿,则当该引脚发生由低电平向高电平跳变时,PxFG的相应位就会置位,表明在该引脚上有中断事件发生。
0 :没有中断请求;1 :有中断请求。
- 7. PxSEL功能选择寄存器
Pl和P2两端口还有其他片内外设功能,考虑减少引脚,将这些功能与芯片外的联系通过复用P1和P2引脚的方式来实现.PxSEL用来选择引脚的IO端口功能与外围模块功能。
0 :选择引脚为I/O端口;
1 :选择引脚为外围模块功能。
以下我以msp430g2553为例,解析GPIO的使用。
二、点亮LED
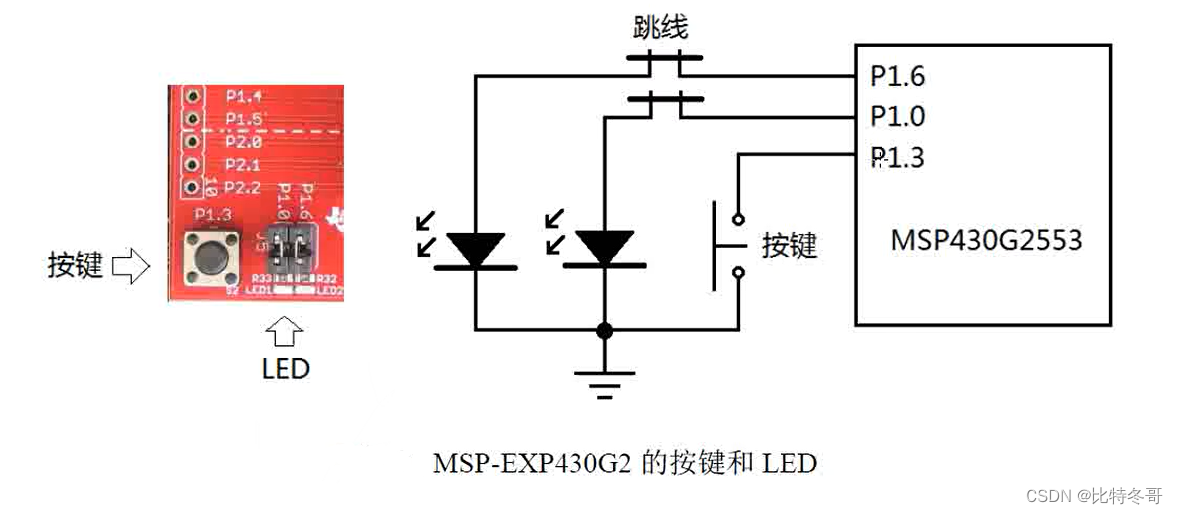
由上方电路图可读:
- LED灯为P1.0和P1.6引脚,与下方GND相连,则为高电平驱动。
- 按键为P1.3引脚,默认为悬空状态,当按键按下时与GND相连,为低电平状态。
#include <msp430.h> int main(void)
{WDTCTL = WDTPW | WDTHOLD; // 关闭看门狗/*初始化LED2为输出*/P1DIR |= BIT6;/*初始化LED2为低电平,熄灭*/P1OUT &= ~BIT6;/*初始化KEY P1.3为输入*/P1DIR &= ~BIT3;/*使能P1.3口的上拉电阻*/P1REN |= BIT3;P1OUT |= BIT3;while(1){if(P1IN & BIT3) /*如果P1.3口为高电平,证明按键没有被按下*/{P1OUT &= ~BIT6; //熄灭LED2}else{P1OUT |= BIT6; //点亮LED2}}return 0;
}三、按键控制LED
#include <msp430.h> int main(void)
{WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer/*初始化LED2为输出*/P1DIR |= BIT6;/*初始化LED2为低电平,熄灭*/P1OUT &= ~BIT6;/*初始化KEY P1.3为输入*/P1DIR &= ~BIT3;/*使能P1.3口的上拉电阻*/P1REN |= BIT3;P1OUT |= BIT3;while(1){if(P1IN & BIT3) /*如果P1.3口为高电平,证明按键没有被按下*/{P1OUT &= ~BIT6; //熄灭LED2}else{P1OUT |= BIT6; //点亮LED2}}return 0;
}
四、更改主时钟
#include <msp430.h> int main(void)
{WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer/*设置MCLK频率1,8,12,16*/DCOCTL = CALDCO_16MHZ;BCSCTL1 = CALBC1_16MHZ;/*初始化LED2所在的IO口P1.6设置为输出*/P1DIR |= BIT6;/*初始化LED2 为低电平*/P1OUT &= ~BIT6;while(1){P1OUT ^= BIT6;__delay_cycles(500000);}return 0;
}
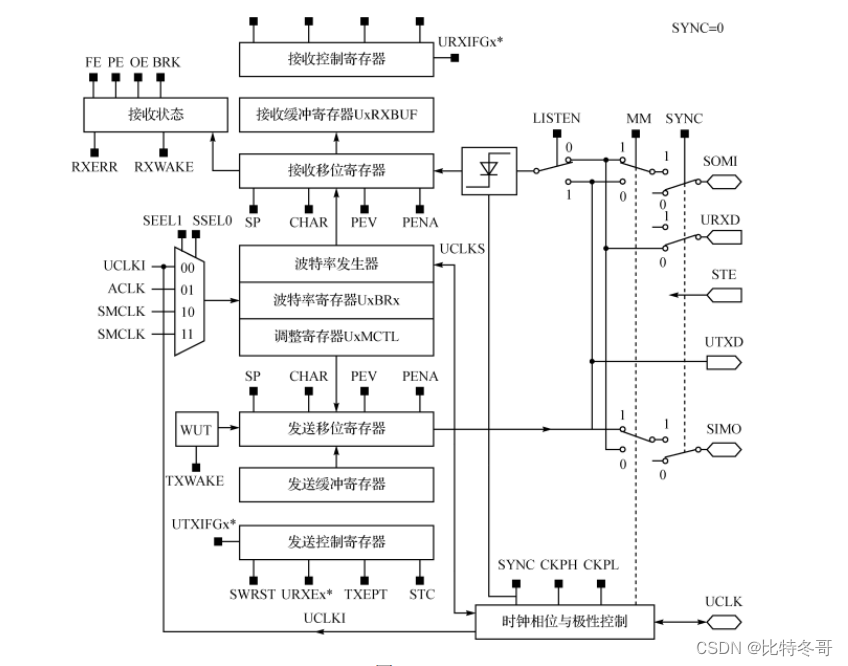
五、串口通信
#include <msp430.h>
#include "stdint.h"
/** @fn: void InitSystemClock(void)* @brief: 初始化系统时钟* @para: none* @return:none* @comment: 初始化系统时钟*/
void InitSystemClock(void)
{/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;/*配置SMCLK的时钟源为DCO*/BCSCTL2 &= ~SELS;/*SMCLK的分频系数置为1*/BCSCTL2 &= ~(DIVS0 | DIVS1);
}/** @fn: void InitUART(void)* @brief: 初始化串口,包括设置波特率,数据位,校验位等* @para: none* @return:none* @comment: 初始化串口*/
void InitUART(void)
{/*复位USCI_Ax*/UCA0CTL1 |= UCSWRST;/*设置为异步模式*/UCA0CTL0 &= ~UCSYNC;/*配置UART时钟源为SMCLK*/UCA0CTL1 |= UCSSEL1;/*配置波特率为9600*/UCA0BR0 = 0x68;UCA0BR1 = 0x00;UCA0MCTL = 1 << 1;/*配置端口,使能端口复用*/P1SEL |= BIT1 + BIT2;P1SEL2 |= BIT1 + BIT2;/*清除复位位,使能UART*/UCA0CTL1 &= ~UCSWRST;
}/** @fn: void UARTSendString(uint8_t *pbuff, uint_8 num)* @brief: 初始化串口发送字符串* @para: pbuff:指向要发送字符串的指针* num:要发送的字符个数* @return:none* @comment: 初始化串口发送字符串*/
void UARTSendString(uint8_t *pbuff, uint8_t num)
{uint8_t cnt = 0;for(cnt = 0; cnt < num; cnt++){/*判断是否有数据正在发送*/while(UCA0STAT & UCBUSY);UCA0TXBUF = *(pbuff + cnt);}
}/** @fn: void PrintNumber(uint16_t num)* @brief: 初始化串口发送数字* @para: num:变量* @return:none* @comment: 初始化串口发送数字*/
void PrintNumber(uint16_t num)
{uint8_t cnt = 0;uint8_t buff[6] = {0,0,0,0,0,'\n'};for(cnt = 0; cnt < 5; cnt++){buff[4 - cnt] = (uint8_t)(num % 10 + '0');num /= 10;}UARTSendString(buff,6);
}int main(void)
{WDTCTL = WDTPW | WDTHOLD; // stop watchdog timerInitSystemClock();InitUART();while(1){PrintNumber(23456);__delay_cycles(500000);}return 0;
}
六、串口中断
#include <msp430.h>
#include "stdint.h"uint8_t combuff[20] = {0}; //长度为20的命令缓冲区,用于保存串口接收到的命令
uint8_t iscomend = 0; //命令结束标志位
/** @fn: void InitSystemClock(void)* @brief: 初始化系统时钟* @para: none* @return:none* @comment: 初始化系统时钟*/
void InitSystemClock(void)
{/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;/*配置SMCLK的时钟源为DCO*/BCSCTL2 &= ~SELS;/*SMCLK的分频系数置为1*/BCSCTL2 &= ~(DIVS0 | DIVS1);
}/** @fn: void InitUART(void)* @brief: 初始化串口,包括设置波特率,数据位,校验位等* @para: none* @return:none* @comment: 初始化串口*/
void InitUART(void)
{/*复位USCI_Ax*/UCA0CTL1 |= UCSWRST;/*设置为异步模式*/UCA0CTL0 &= ~UCSYNC;/*配置UART时钟源为SMCLK*/UCA0CTL1 |= UCSSEL1;/*配置波特率为9600*/UCA0BR0 = 0x68;UCA0BR1 = 0x00;UCA0MCTL = 1 << 1;/*配置端口,使能端口复用*/P1SEL |= BIT1 + BIT2;P1SEL2 |= BIT1 + BIT2;/*清除复位位,使能UART*/UCA0CTL1 &= ~UCSWRST;/*接收中断启用*/IE2 |= UCA0RXIE;/*清空接收中断标志*/IFG2 &= ~UCA0RXIFG;
}/** @fn: void UARTSendString(uint8_t *pbuff, uint_8 num)* @brief: 初始化串口发送字符串* @para: pbuff:指向要发送字符串的指针* num:要发送的字符个数* @return:none* @comment: 初始化串口发送字符串*/
void UARTSendString(uint8_t *pbuff, uint8_t num)
{uint8_t cnt = 0;for(cnt = 0; cnt < num; cnt++){/*判断是否有数据正在发送*/while(UCA0STAT & UCBUSY);UCA0TXBUF = *(pbuff + cnt);}
}/** @fn: void PrintNumber(uint16_t num)* @brief: 初始化串口发送数字* @para: num:变量* @return:none* @comment: 初始化串口发送数字*/
void PrintNumber(uint16_t num)
{uint8_t cnt = 0;uint8_t buff[6] = {0,0,0,0,0,'\n'};for(cnt = 0; cnt < 5; cnt++){buff[4 - cnt] = (uint8_t)(num % 10 + '0');num /= 10;}UARTSendString(buff,6);
}/** @fn: void Execute(uint8_t *combuff)* @brief: 串口命令执行函数* @para: combuff:指向串口命令缓冲区的指针* @return:none* @comment: 串口命令执行函数*/
void Execute(uint8_t *combuff)
{const uint8_t charbuff[5][10] = {"王龙","米雷龙","班长","LED1 ON!","LED1 OFF!"};if(combuff[0] == charbuff[0][0] && combuff[1] == charbuff[0][1]){UARTSendString("aa",2);}else if(combuff[0] == charbuff[1][0] && combuff[1] == charbuff[1][1]){UARTSendString("bb",2);}else if(combuff[0] == charbuff[2][0] && combuff[1] == charbuff[2][1]){UARTSendString("cc",2);}else if(combuff[0] == charbuff[3][0] && combuff[6] == charbuff[3][6]){UARTSendString("Yes,LED ON!",11);P1OUT |= BIT0;}if(combuff[0] == charbuff[4][0] && combuff[6] == charbuff[4][6]){UARTSendString("Yes,LED OFF!",12);P1OUT &= ~BIT0;}
}int main(void)
{WDTCTL = WDTPW | WDTHOLD; // stop watchdog timerInitSystemClock();InitUART();P1DIR |= BIT0;P1OUT &= ~BIT0;__bis_SR_register(GIE);//打开总中断while(1){if(iscomend){iscomend = 0; //清除标志位,防止重复执行Execute(combuff);}}return 0;
}#pragma vector = USCIAB0RX_VECTOR
__interrupt void UART_Receive_ISR(void) //Port1_ISR(void) 中断服务函数
{static uint8_t cnt = 0;if(IFG2 & UCA0RXIFG)//检测是否是USCI_AO的接收中断,USCI_AO和USCI_BO的接收中断共享同一向量{IFG2 &= ~UCA0RXIFG; //清空接收中断标志combuff[cnt++] = UCA0RXBUF; //保存命令cnt %= 20; //防止cnt大于20,导致缓存区溢出if(combuff[cnt - 1] == '\n'){cnt = 0; //复位计数器iscomend = 1; //命令接收完毕标志}}/*清空接收中断标志*/IFG2 &= ~UCA0RXIFG;
}七、外部中断
#include <msp430.h> /*** main.c*/
int main(void)
{WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer/*初始化LED2为输出*/P1DIR |= BIT6;/*初始化LED2为低电平,熄灭*/P1OUT &= ~BIT6;/*初始化KEY P1.3为输入*/P1DIR &= ~BIT3;/*使能P1.3口的上拉电阻*/P1REN |= BIT3;P1OUT |= BIT3;/*打开P1.3口的中断*/P1IE |= BIT3;/*设定为下降沿触发*/P1IES |= BIT3;/*清除中断标志位*/P1IFG &= ~BIT3;/*打开全局中断*/__bis_SR_register(GIE);while(1){}return 0;
}#pragma vector = PORT1_VECTOR
__interrupt void Port1_ISR(void) //Port1_ISR(void) 中断服务函数
{if(P1IFG & BIT3) //判断是否P1.3产生中断{P1OUT ^= BIT6;P1IFG &= ~ BIT3; //清除标志位}
}
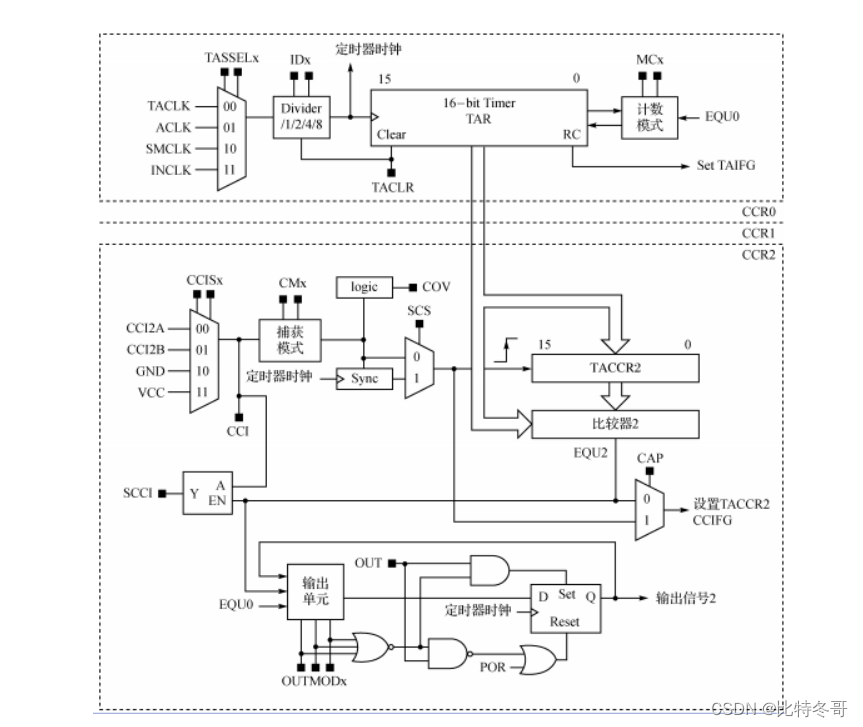
八、定时器
#include <msp430.h>
#include "stdint.h"int main(void)
{uint8_t cnt = 0;WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;P1DIR |= BIT0 ;/*配置时钟源为SMCLK*/TA1CTL |= TASSEL_2;/*设置工作模式为Up Mode*/TA1CTL |= MC_1;/*设置定时时间间隔*/TA1CCR0 = 49999; //0.05swhile(1){if(TA1CTL & TAIFG){cnt++;TA1CTL &= ~TAIFG; //清除标志位if(cnt == 20){P1OUT ^= BIT0;cnt = 0;}}}return 0;
}
九、定时器中断
#include <msp430.h>
#include "stdint.h"uint32_t currenttime = 40500; //用来保存时间的变量,初值代表11:15:00
uint8_t flag = 0;
/** @fn: void InitSystemClock(void)* @brief: 初始化系统时钟* @para: none* @return:none* @comment: 初始化系统时钟*/
void InitSystemClock(void)
{/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;/*配置SMCLK的时钟源为DCO*/BCSCTL2 &= ~SELS;/*SMCLK的分频系数置为1*/BCSCTL2 &= ~(DIVS0 | DIVS1);
}/** @fn: void InitUART(void)* @brief: 初始化串口,包括设置波特率,数据位,校验位等* @para: none* @return:none* @comment: 初始化串口*/
void InitUART(void)
{/*复位USCI_Ax*/UCA0CTL1 |= UCSWRST;/*设置为异步模式*/UCA0CTL0 &= ~UCSYNC;/*配置UART时钟源为SMCLK*/UCA0CTL1 |= UCSSEL1;/*配置波特率为9600*/UCA0BR0 = 0x68;UCA0BR1 = 0x00;UCA0MCTL = 1 << 1;/*配置端口,使能端口复用*/P1SEL |= BIT1 + BIT2;P1SEL2 |= BIT1 + BIT2;/*清除复位位,使能UART*/UCA0CTL1 &= ~UCSWRST;/*接收中断启用*/IE2 |= UCA0RXIE;/*清空接收中断标志*/IFG2 &= ~UCA0RXIFG;
}/** @fn: void UARTSendString(uint8_t *pbuff, uint_8 num)* @brief: 初始化串口发送字符串* @para: pbuff:指向要发送字符串的指针* num:要发送的字符个数* @return:none* @comment: 初始化串口发送字符串*/
void UARTSendString(uint8_t *pbuff, uint8_t num)
{uint8_t cnt = 0;for(cnt = 0; cnt < num; cnt++){/*判断是否有数据正在发送*/while(UCA0STAT & UCBUSY);UCA0TXBUF = *(pbuff + cnt);}
}/** @fn: void PrintTime(uint32_t time)* @brief: 初始化串口发送字符串* @para: pbuff:指向要发送字符串的指针* num:要发送的字符个数* @return:none* @comment: 初始化串口发送字符串*/
void PrintTime(uint32_t time)
{uint8_t charbuff[] = {0,0,':',0,0,':',0,0,'\n'};charbuff[7] = (uint8_t)((time % 60) % 10) + '0'; //得到当前秒个位charbuff[6] = (uint8_t)((time % 60) / 10) + '0'; //得到当前秒十位charbuff[4] = (uint8_t)((time % 3600) / 60 % 10) + '0'; //得到当前分个位charbuff[3] = (uint8_t)((time % 3600) / 60 / 10) + '0'; //得到当前分十位charbuff[1] = (uint8_t)((time / 3600) % 10) + '0'; //得到当前时个位charbuff[0] = (uint8_t)(time / 3600 / 10) + '0'; //得到当前时十位UARTSendString("当前时间:",10);UARTSendString(charbuff,9);
}int main(void)
{WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;InitSystemClock();InitUART();P1DIR |= BIT0 ;/*配置时钟源为SMCLK*/TA1CTL |= TASSEL_2;/*设置工作模式为Up Mode*/TA1CTL |= MC_1;/*设置定时时间间隔*/TA1CCR0 = 49999; //0.05s/*打开定时器TAIFG中断*/TA1CTL |= TAIE;/*打开全局中断*/__bis_SR_register(GIE);while(1){if(flag == 1){flag = 0;P1OUT ^= BIT0;PrintTime(currenttime);}}return 0;
}#pragma vector = TIMER1_A1_VECTOR
__interrupt void Timer_Tick(void)
{static uint8_t cnt = 0;switch(TA1IV) //读取的话无需手动清零标志位{case 0x02:break;case 0x04:break;case 0x0A:cnt++;if(cnt == 20){cnt = 0;flag = 1; //1s时间到了currenttime ++; //时间加1currenttime %= 86400; //一天24小时,防止溢出}break;default:break;}
}十、PWM
#include <msp430.h> int main(void)
{unsigned int cnt = 0;WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;/*初始化P1.6为输入*/P1DIR &= ~BIT6;/*设置时钟源为SMCLK*/TA1CTL |= TASSEL_2;/*设置工作模式为Up & Dowm*/TA1CTL |= MC_0 | MC_1;/*设置TA1CCR0为0x00ff*/TA1CCR0 = 0x00FF;/*设置TA1CCR2为0x00ff*/TA1CCR2 = 0x00FF; //占空比 = (TACCR0 - TACCR2)/ TACCR0 频率 = SMCLK / (TACCR0+1)/2/*设置为比较模式*/TA1CCTL0 &= ~CAP;TA1CCTL2 &= ~CAP;/*设置比较输出模式*/TA1CCTL2 |= OUTMOD_6;/*设置IO复用*/P2SEL |= BIT5;P2DIR |= BIT5;while(1){for(cnt = 0;cnt < 0x00FF; cnt++){TA1CCR2 = cnt;__delay_cycles(5000);}for(cnt = 0x00FF;cnt > 0; cnt--){TA1CCR2 = cnt;__delay_cycles(5000);}}return 0;
}
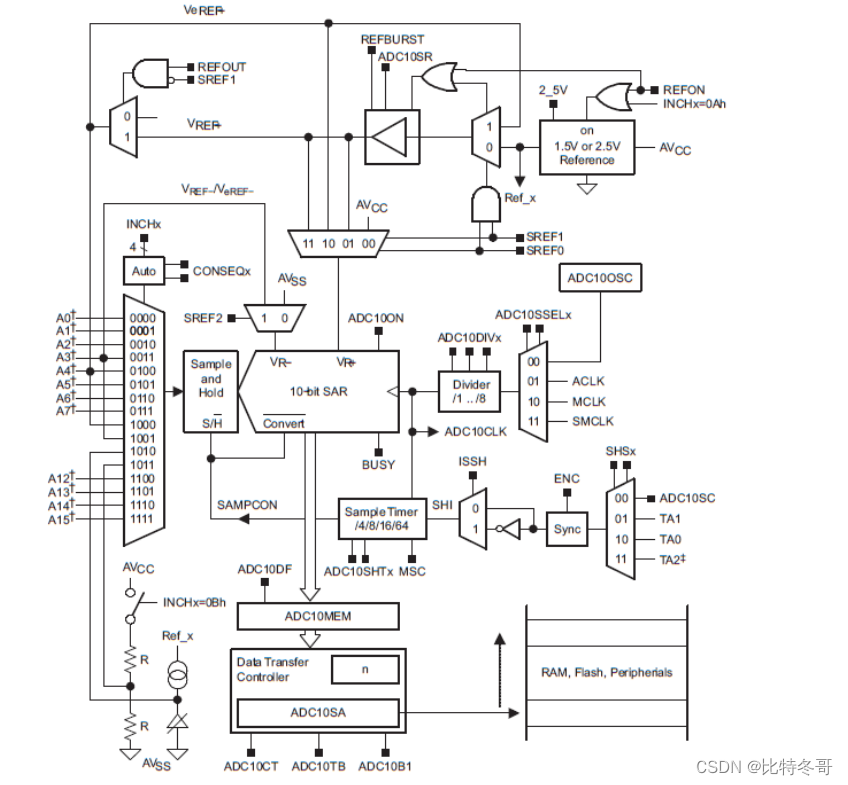
十一、ADC
#include <msp430.h>
#include "stdint.h"/** @fn: void InitSystemClock(void)* @brief: 初始化系统时钟* @para: none* @return:none* @comment: 初始化系统时钟*/
void InitSystemClock(void)
{/*配置DCO为1MHZ时钟*/DCOCTL = CALDCO_1MHZ;BCSCTL1 = CALBC1_1MHZ;/*配置SMCLK的时钟源为DCO*/BCSCTL2 &= ~SELS;/*SMCLK的分频系数置为1*/BCSCTL2 &= ~(DIVS0 | DIVS1);
}/** @fn: void InitUART(void)* @brief: 初始化串口,包括设置波特率,数据位,校验位等* @para: none* @return:none* @comment: 初始化串口*/
void InitUART(void)
{/*复位USCI_Ax*/UCA0CTL1 |= UCSWRST;/*设置为异步模式*/UCA0CTL0 &= ~UCSYNC;/*配置UART时钟源为SMCLK*/UCA0CTL1 |= UCSSEL1;/*配置波特率为9600*/UCA0BR0 = 0x68;UCA0BR1 = 0x00;UCA0MCTL = 1 << 1;/*配置端口,使能端口复用*/P1SEL |= BIT1 + BIT2;P1SEL2 |= BIT1 + BIT2;/*清除复位位,使能UART*/UCA0CTL1 &= ~UCSWRST;/*接收中断启用*/IE2 |= UCA0RXIE;/*清空接收中断标志*/IFG2 &= ~UCA0RXIFG;
}/** @fn: void UARTSendString(uint8_t *pbuff, uint_8 num)* @brief: 初始化串口发送字符串* @para: pbuff:指向要发送字符串的指针* num:要发送的字符个数* @return:none* @comment: 初始化串口发送字符串*/
void UARTSendString(uint8_t *pbuff, uint8_t num)
{uint8_t cnt = 0;for(cnt = 0; cnt < num; cnt++){/*判断是否有数据正在发送*/while(UCA0STAT & UCBUSY);UCA0TXBUF = *(pbuff + cnt);}
}/** @fn: void PrintNumber(uint16_t num)* @brief: 初始化串口发送数字* @para: num:变量* @return:none* @comment: 初始化串口发送数字*/
void PrintNumber(uint16_t num)
{uint8_t cnt = 0;uint8_t buff[6] = {0,0,0,0,0,'\n'};for(cnt = 0; cnt < 5; cnt++){buff[4 - cnt] = (uint8_t)(num % 10 + '0');num /= 10;}UARTSendString(buff,6);
}/** @fn: void PrintFloat(float num)* @brief: 初始化串口发送浮点型数字* @para: num:浮点型变量* @return:none* @comment: 初始化串口发送浮点型数字*/
void PrintFloat(float num)
{uint8_t buff[] = {0,'.',0,0,0,'\n'};uint16_t temp = (uint16_t)(num * 1000);buff[0] = (uint8_t)(temp / 1000) + '0';buff[2] = (uint8_t)((temp % 1000) / 100) + '0';buff[3] = (uint8_t)((temp / 100) / 10) + '0';buff[4] = (uint8_t)(temp % 10) + '0';UARTSendString(buff,6);
}/** @fn: void InitADC(void)* @brief: ADC初始化* @para: none* @return:none* @comment: ADC初始化*/
void InitADC(void)
{/*设置ADC时钟MCLK*/ADC10CTL1 |= ADC10SSEL_2;/*ADC 2分频*/ADC10CTL1 |= ADC10DIV_0;/*设置ADC基准源*/ADC10CTL0 |= SREF_1;/*设置ADC采样保持时间64CLK*/ADC10CTL0 |= ADC10SHT_3;/*设置ADC采样率200k*/ADC10CTL0 &= ~ADC10SR;/*ADC基准选择2.5V*/ /* ADC基准选择1.5V */ADC10CTL0 |= REF2_5V; /* ADC10CTL0 &= ~REF2_5V; *//*开启基准*/ADC10CTL0 |= REFON;/*选择ADC输入通道A0*/ADC10CTL1 |= INCH_0;/*允许A0模拟输入*/ADC10AE0 |= 0x0001;/*开启ADC*/ADC10CTL0 |= ADC10ON;
}/** @fn: uint16_t GetADCValue(void)* @brief: 进行一次ADC转换并返回ADC转换结果* @para: none* @return:ADC转换结果* @comment: ADC转换结果为10bit,以uint16_t类型返回,低10位有效数据*/
uint16_t GetADCValue(void)
{/*开始转换*/ADC10CTL0 |= ADC10SC|ENC;/*等待转换完成*/while(ADC10CTL1 & ADC10BUSY);/*返回结果*/return ADC10MEM;
}int main(void)
{float voltage = 0.0;uint16_t adcvalue = 0;WDTCTL = WDTPW | WDTHOLD; // stop watchdog timerInitSystemClock();InitUART();InitADC();while(1){adcvalue = GetADCValue();voltage = adcvalue * 2.5 / 1023;UARTSendString("ADC10转接结果为:",17);PrintNumber(adcvalue);UARTSendString("相应电压值为:",14);PrintFloat(voltage);__delay_cycles(300000);}return 0;
}
相关文章:
【电赛MSP430系列】GPIO、LED、按键、时钟、中断、串口、定时器、PWM、ADC
文章目录MSP430一、GPIO二、点亮LED三、按键控制LED四、更改主时钟五、串口通信六、串口中断七、外部中断八、定时器九、定时器中断十、PWM十一、ADCMSP430 MSP430 是德州仪器(TI)一款性能卓越的超低功耗 16 位单片机,自问世以来,…...

【Linux】进程理解与学习(Ⅱ)
环境:centos7.6,腾讯云服务器Linux文章都放在了专栏:【Linux】欢迎支持订阅🌹相关文章推荐:【Linux】冯.诺依曼体系结构与操作系统【Linux】进程理解与学习(Ⅰ)浅谈Linux下的shell--BASH前言章节…...

vscode 爽到起飞的快捷键
这里写目录标题1. 窗口操作2. 代码编辑3. 批量操作4. 错误处理1. 窗口操作 文件之间切换: CtrlTab 切出一个新的编辑器窗口(最多3个): Ctrl\ 切换左中右3个编辑器窗口的快捷键: Ctrl1 Ctrl2 Ctrl3 2. 代码编辑 代码格式化: ShiftAltF 向上或向下移动一行: Alt…...
vs +qt 打包.cpp和.h为DLL文件
文章目录一 编译成库1 创建一个Qt library 项目2,将已有的文件拷贝到项目目录下3 在项目中添加现有项4,拷贝头文件到需要暴露给外面使用的类的头文件中5 拷贝xxx_EXPORT的宏到需要被暴露的类的名前面6 然后点击编译 就完成了。得到的dll文件在debug里面二…...

echarts有滑块
vue下使用echarts折线图及其横坐标拖拽功能 drawLine() {let that this,lineDate [],dispatchCount [],finishCount [],newCount [];let param {// 参数};axios.post(url, param).then(function(response) {let rs response.data.data;if (rs ! undefined && rs…...

MATLAB绘制ROC曲线
ROC曲线(Receiver Operating Characteristic Curve) 1 简介 ROC曲线是用于评估二元分类模型(如Logistic回归)表现优劣的一种工具,其横轴表示假阳性率(false positive rate,FPR),即实际为负例但…...
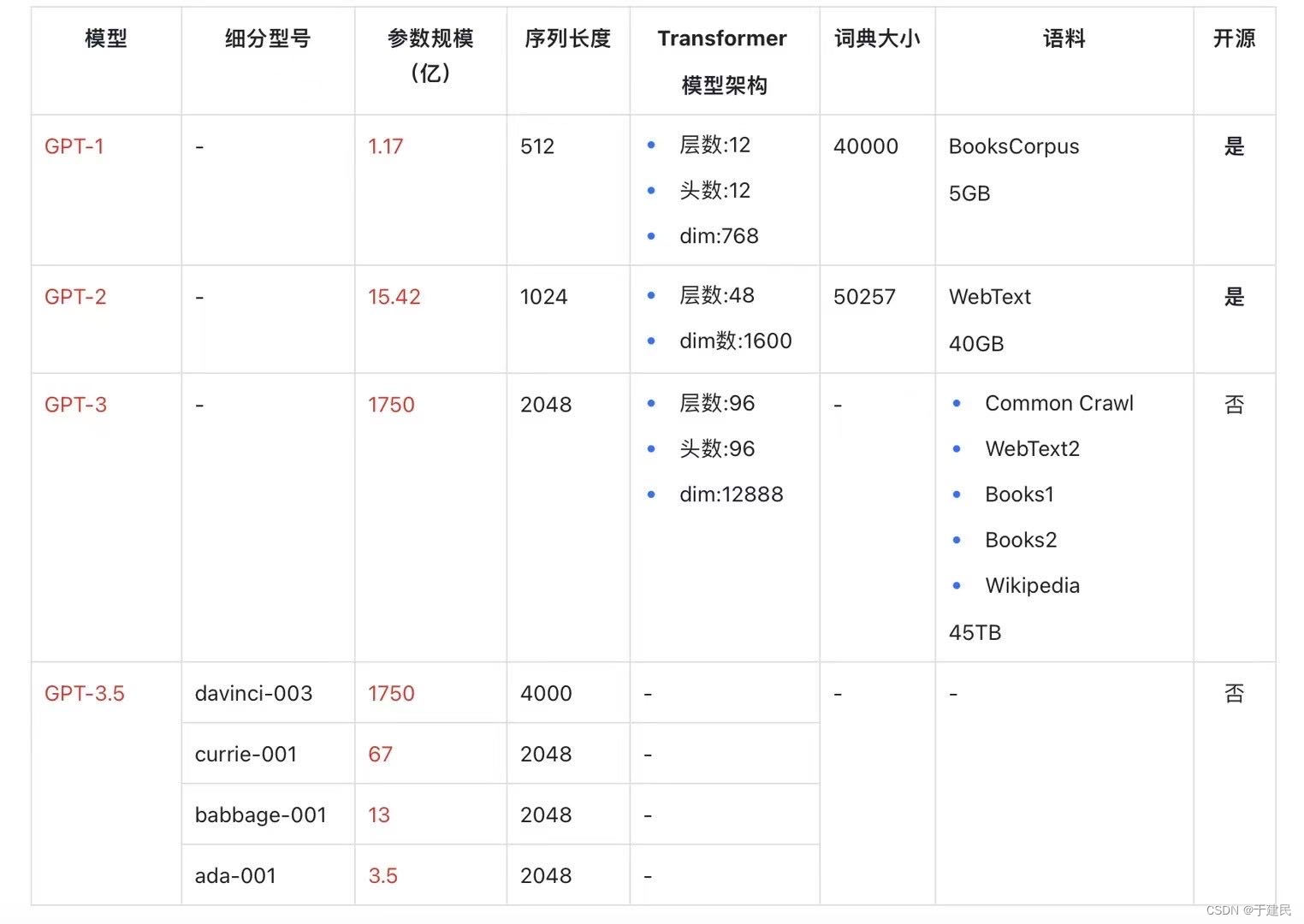
ChatGPT前传
文章目录前言GPT概述GPT-1代GPT-1 学习目标和概念介绍GPT-1 训练数据集GPT-1 模型结构和应用细节GPT-1 效果性能和总结GPT-2代GPT-2 学习目标和概念介绍GPT-2 训练数据集GPT-2 模型结构和应用细节GPT-2 性能效果和总结GPT-3代GPT-3 学习目标和概念介绍GPT-3 训练数据集GPT-3 模…...

我的十年编程路 2020年篇
我出生在1990年,2020年到来的时候,我完成了一项成就:奔三。同时,也开启了新的征程:奔四。 2020年的春节是在广州的丈母娘家度过的,春节后大概是初五,或者是初六,我和媳妇就返回天津…...
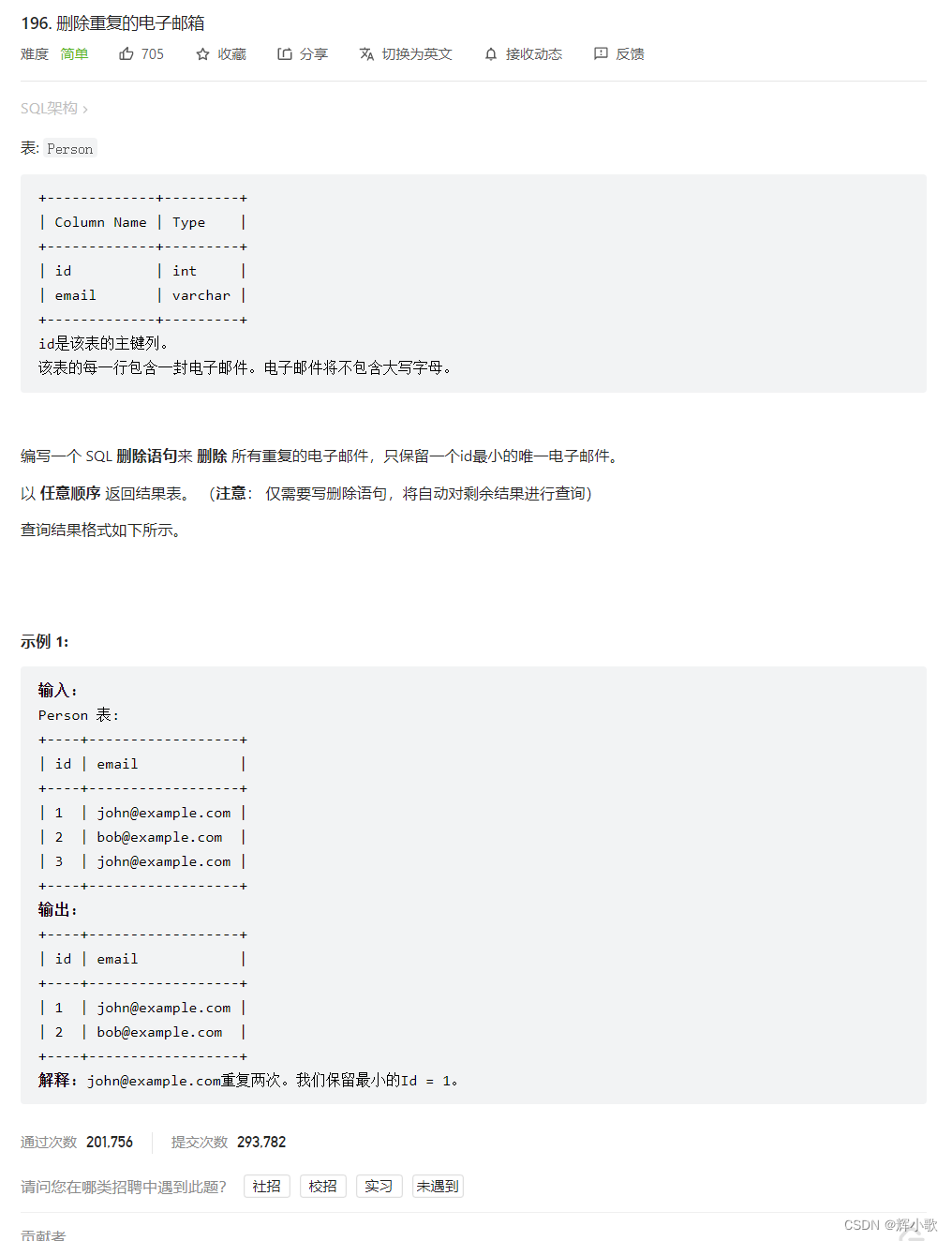
力扣-SQL【入门】
https://leetcode.cn/study-plan/sql/?progressxhqm4sjh 目录选择595. 大的国家1757. 可回收且低脂的产品584. 寻找用户推荐人183. 从不订购的客户排序 & 修改1873. 计算特殊奖金627. 变更性别196. 删除重复的电子邮箱选择 595. 大的国家 # Write your MySQL query state…...
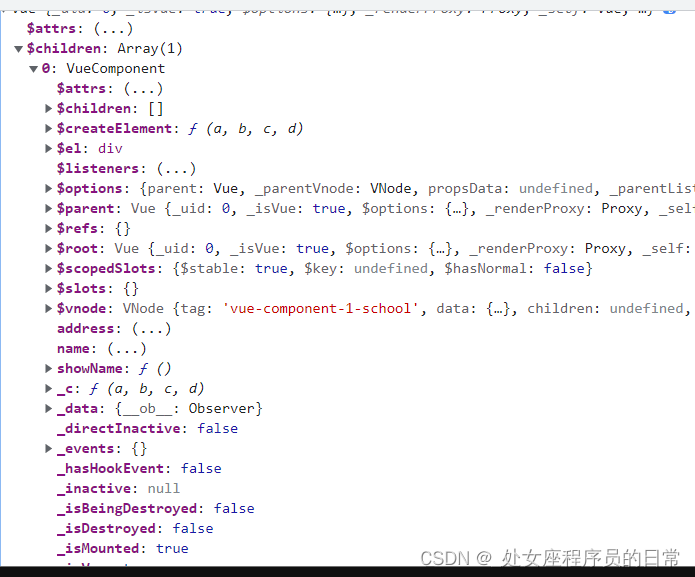
Vue中组件到底是什么
1.先说结论: Vue中组件本质是一个名为VueComponent的构造函数,且不是程序员定义的,是Vue.extend生成的。 2.我们使用组件时发生了什么? 比如定义了一个school,然后在页面上使用它 我们只需要写 < school/ > 或< school &…...

不同时间间隔数据对统计结果的影响
目录摘要1. 实测数据来源2. 数据分析方法3 结果分析3.1 波况分析摘要 采用不同的波浪观测方法所获得的波浪数据的时间间隔不一致,其数据的准确性须进行分析。基于大埕湾逐时周年波浪观测数据,截取不同时间间隔的波浪数据,采用统计和相关分析…...

hudi系列-数据写入方式及使用场景
hudi支持多种数据写入方式:insert、bulk_insert、upsert、boostrap,我们可以根据数据本身属性(append-only或upsert)来选择insert和upsert方式,同时也支持对历史数据的高效同步并嫁接到实时流程。 这里的使用技术组合为flink + hudi-0.11 upsert 这是hudi默认的写入方式,…...

C # FileStream文件流
本章讲述:FileStream类的基本功能,以及简单示例; 1、引用命名空间:using System.IO; 2、注意:使用IO操作文件时,要注意流关闭和释放问题! 强力推荐:将创建文件流对象的过程写在usi…...
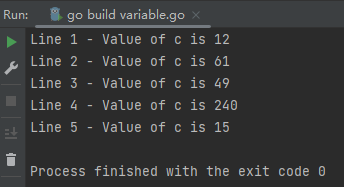
Go语言中的保留字和运算符详解
前言 🏠个人主页:我是沐风晓月 🧑个人简介:大家好,我是沐风晓月,双一流院校计算机专业,阿里云博客专家 😉😉 💕 座右铭: 先努力成长自己ÿ…...
C语言基础)
Linux编译之(1)C语言基础
Linux编译之C语言基础 Author:Once Day Date:2023年3月11日 漫漫长路,才刚刚开始… 1.概述 在Linux下开发多源文件的C代码文件,是一定要了解Makefile的,虽然现在构建工具很多,但学习的一开始࿰…...
CPU平均负载高问题定位分析
一、Linux操作系统CPU平均负载 1.1什么是CPU平均负载 1.2 怎么查看平均负载数值 二、Linux操作系统CPU使用率和平均负载区别 CPU使用率和平均负载区别 三、阿里云Linux操作系统CPU压测环境准备 3.1 核心命令应用场景 3.2 模拟生产环境出现的多种问题环境准备 分析工具安…...

Python蓝桥杯训练:基本数据结构 [二叉树] 中
Python蓝桥杯训练:基本数据结构 [二叉树] 中 文章目录Python蓝桥杯训练:基本数据结构 [二叉树] 中一、[翻转二叉树](https://leetcode.cn/problems/invert-binary-tree/)二、[对称二叉树](https://leetcode.cn/problems/symmetric-tree/)三、[二叉树的最…...
 – UDS 协议)
读取 DTC 信息服务 (0x19) – UDS 协议
总目录链接>> AutoSAR入门和实战系列总目录 0x19读取 DTC 信息服务概述 读取 DTC 信息服务在 UDS 协议中用于从车辆或特定 ECU 或节点读取 DTC。UDS 协议的主要任务之一是故障诊断。每当车辆发生任何故障时,与该故障相对应的诊断故障代码(DTC&a…...

Hive 分区表新增字段 cascade
背景 在以前上线的分区表中新加一个字段,并且要求添加到指定的位置列。 模拟测试 加 cascade 操作 创建测试表 create table if not exists sqltest.table_add_column_test(org_col1 string comment 原始数据1,org_col2 string comment 原始数据2 ) comment 增…...

【Java版oj】day08两种排序方法、最小公倍数
目录 一、两种排序方法 (1)原题再现 (2)问题分析 (3)完整代码 二、最小公倍数 (1)原题再现 (2)问题分析 (3)完整代码 一、两种…...

基于扩散模型的歌声合成技术:DiffSinger架构解析与实践应用
基于扩散模型的歌声合成技术:DiffSinger架构解析与实践应用 【免费下载链接】DiffSinger 项目地址: https://gitcode.com/gh_mirrors/dif/DiffSinger DiffSinger作为开源歌声合成领域的创新解决方案,通过扩散模型与深度学习技术的深度融合&#…...

SaaS级AI员工系统源码商用版,多租户+计费系统+API分销,一套源码搞定
温馨提示:文末有资源获取方式最近“龙虾AI”的热度居高不下,到处都在讨论如何“养龙虾”。但观察下来发现,这类应用对普通用户而言技术门槛还是偏高,部署、配置、调试都需要专人跟进,最终往往沦为摆设。源码获取方式在…...

计算机毕业设计springboot众筹系统 基于SpringBoot的校园项目众筹融资平台设计与实现 高校创新创业众筹服务与资金管理系统构建研究
计算机毕业设计springboot众筹系统(配套有源码 程序 mysql数据库 论文) 本套源码可以在文本联xi,先看具体系统功能演示视频领取,可分享源码参考。 随着我国经济的高速发展与人们生活水平的日益提高,人们对生活质量的追求也多种多样…...

告别‘缺少DLL’:用EnigmaVB给Qt5.14程序封包的保姆级避坑指南
告别“缺少DLL”困境:EnigmaVBQt5.14封包全流程实战手册 当你用Qt Creator完成开发,满怀期待地将程序打包发给用户,却收到“缺少xxx.dll”的报错反馈时,这种挫败感开发者都深有体会。本文将以Qt5.14为例,结合EnigmaVB封…...

FastAdmin+PHPStudy保姆级安装教程:从下载到配置数据库的完整流程
FastAdminPHPStudy极速开发环境搭建实战指南 作为一名长期使用FastAdmin框架的开发者,我深知一个顺畅的本地开发环境对项目效率的影响。本文将带你从零开始,用最简洁的方式完成FastAdmin与PHPStudy的完美搭配,避开那些新手常踩的"坑&quo…...

如何快速掌握Windows系统权限管理:NSudo终极指南
如何快速掌握Windows系统权限管理:NSudo终极指南 【免费下载链接】NSudo [Deprecated, work in progress alternative: https://github.com/M2Team/NanaRun] Series of System Administration Tools 项目地址: https://gitcode.com/gh_mirrors/ns/NSudo 想要…...

Souliss嵌入式状态同步框架:轻量级去中心化智能家居通信实践
1. Souliss 智能家居网络框架深度解析:面向嵌入式工程师的底层通信架构实践指南Souliss 是一个专为资源受限嵌入式节点设计的轻量级、去中心化智能家居网络框架。其核心目标并非构建通用物联网平台,而是解决真实家庭场景中多协议共存、低功耗节点协同、边…...

3分钟掌握Balena Etcher:安全可靠的跨平台镜像烧录工具
3分钟掌握Balena Etcher:安全可靠的跨平台镜像烧录工具 【免费下载链接】etcher Flash OS images to SD cards & USB drives, safely and easily. 项目地址: https://gitcode.com/GitHub_Trending/et/etcher Balena Etcher是一款专为简化操作系统镜像部署…...

RWKV7-1.5B-g1a参数详解教程:max_new_tokens/temperature/top_p调优实操手册
RWKV7-1.5B-g1a参数详解教程:max_new_tokens/temperature/top_p调优实操手册 1. 模型简介 rwkv7-1.5B-g1a 是基于新一代 RWKV-7 架构的多语言文本生成模型,特别适合中文场景下的基础问答、文案创作和简短总结任务。作为轻量级模型,它在保持良…...
:列表、元组、集合与字典)
Python从入门到精通(第08章):列表、元组、集合与字典
Python从入门到精通(第08章):列表、元组、集合与字典 开头导语 这是本系列第08章。本文采用"知识点讲解 + 错误示例 + 正确写法 + 自测清单"的结构,目标是让你不仅能看懂,还能独立写出可运行代码。建议你边看边敲,所有示例都亲自执行一次。 章节摘要 本章围…...