【C++高阶数据结构】红黑树:全面剖析与深度学习
目录
- 🚀 前言:红黑树与AVL树的比较
- 一: 🔥 红黑树的概念
- 二: 🔥 红黑树的性质
- 三: 🔥 红黑树节点的定义和结构
- 🚀 3.1 基本元素
- 🚀 3.2 节点颜色
- 🚀 3.3 构造函数
- 🚀 3.4 红黑树节点的定义
- 四:🔥 红黑树的插入操作
- 五:🔥 红黑树的验证
- 六:🔥 红黑树的完整代码

🚀 前言:红黑树与AVL树的比较
红黑树和AVL树都是高效的平衡二叉树,增删改查的时间复杂度都是O( l o g 2 N log_2 N log2N),红黑树不追
求绝对平衡,其只需保证最长路径不超过最短路径的2倍,相对而言,降低了插入和旋转的次数,
所以在经常进行增删的结构中性能比AVL树更优,而且红黑树实现比较简单,所以实际运用中红
黑树更多。
一: 🔥 红黑树的概念
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。

二: 🔥 红黑树的性质
1. 每个结点不是红色就是黑色
2. 根节点是黑色的
3. 如果一个节点是红色的,则它的两个孩子结点是黑色的
4. 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
5. 每个叶子结点都是黑色的(此处的叶子结点指的是空结点)
思考:为什么满足上面的性质,红黑树就能保证:其最长路径中节点个数不会超过最短路径节点个数的两倍?
三: 🔥 红黑树节点的定义和结构
🚀 3.1 基本元素
_left:指向节点的左子节点的指针_right:指向节点的右子节点的指针_parent:指向节点的父节点的指针_kv:一个结构体或配对(pair),包含节点的键值(key)和值(value)。这取决于红黑的具体用途,可能只包含键或包含键值对。_col:表示当前节点的颜色。
🚀 3.2 节点颜色
在上面的定义中,_col 成员变量用于表示节点的颜色,通过 Color 枚举类型来定义,可以是 RED 或 BLACK。
🚀 3.3 构造函数
初始化一个新节点时,通常需要一个构造函数,它接受一个键值对(或仅键),并设置节点的左子节点、右子节点、父节点和颜色(初始化为红色)
🚀 3.4 红黑树节点的定义
// 节点的颜色
enum Color{RED, BLACK};
// 红黑树节点的定义
template<class ValueType>
struct RBTreeNode
{RBTreeNode(const ValueType& data = ValueType(),Color color = RED): _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr), _data(data), _color(color){}RBTreeNode<ValueType>* _pLeft; // 节点的左孩子RBTreeNode<ValueType>* _pRight; // 节点的右孩子RBTreeNode<ValueType>* _pParent; // 节点的双亲(红黑树需要旋转,为了实现简单给出该字段)ValueType _data; // 节点的值域Color _color; // 节点的颜色
}
思考:在节点的定义中,为什么要将节点的默认颜色给成红色的?
答案:优先增加黑色节点会破坏红黑树的默认规则和结构,而新插入红色节点可以通过调整来适应规则,不一定会破坏结构。
四:🔥 红黑树的插入操作
- 红黑树是在二叉搜索树的基础上加上其平衡限制条件,因此红黑树的插入可分为两步:
1. 按照二叉搜索的树规则插入新节点
template<class ValueType>
class RBTree
{//……bool Insert(const ValueType& data){PNode& pRoot = GetRoot();if (nullptr == pRoot){pRoot = new Node(data, BLACK);// 根的双亲为头节点pRoot->_pParent = _pHead;_pHead->_pParent = pRoot;}else{// 1. 按照二叉搜索的树方式插入新节点// 2. 检测新节点插入后,红黑树的性质是否造到破坏,// 若满足直接退出,否则对红黑树进行旋转着色处理}// 根节点的颜色可能被修改,将其改回黑色pRoot->_color = BLACK;_pHead->_pLeft = LeftMost();_pHead->_pRight = RightMost();return true;}
private:PNode& GetRoot(){ return _pHead->_pParent;}// 获取红黑树中最小节点,即最左侧节点PNode LeftMost();// 获取红黑树中最大节点,即最右侧节点PNode RightMost();
private:PNode _pHead;
};
2. 检测新节点插入后,红黑树的性质是否造到破坏
因为新节点的默认颜色是红色,因此:如果其双亲节点的颜色是黑色,没有违反红黑树任何
性质,则不需要调整;但当新插入节点的双亲节点颜色为红色时,就违反了性质三不能有连
在一起的红色节点,此时需要对红黑树分情况来讨论:
约定 : cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点
- 情况一: cur为红,p为红,g为黑,u存在且为红

cur和p均为红,违反了性质三,此处能否将p直接改为黑?
解决方式:将p,u改为黑,g改为红,然后把g当成cur,继续向上调整。
-
情况二 : cur为红,p为红,g为黑,u不存在/u存在且为黑

p为g的左孩子,cur为p的左孩子,则进行右单旋转;相反,
p为g的右孩子,cur为p的右孩子,则进行左单旋转
p、g变色–p变黑,g变红 -
情况三 : cur为红,p为红,g为黑,u不存在 / u存在且为黑

解决方式: p为g的左孩子,cur为p的右孩子,则针对p做左单旋转;相反,p为g的右孩子,cur为p的左孩子,则针对p做右单旋转则转换成了情况2
具体实现代码如下:
bool Insert(const pair<K, V>& kv){if (_root == nullptr) {_root = new Node(kv);_root->_col = BLACK;return true;}// 找到插入位置Node* cur = _root, * parent = nullptr;while (cur){if (cur->_kv.first == kv.first) return false;else if (cur->_kv.first < kv.first) {parent = cur;cur = cur->_right;}else {parent = cur;cur = cur->_left;}}cur = new Node(kv);// 新增节点 颜色优先选择红色cur->_col = RED;if (kv.first > parent->_kv.first) parent->_right = cur;else parent->_left = cur;cur->_parent = parent;// 1、parent不存在,cur就是根了,出去后把根处理成黑的// 2、parent存在,且为黑// 3、parent存在,且为红,继续循环处理// 变色了之后持续网上处理while (parent && parent->_col == RED) // 父亲颜色是红色就需要继续处理(来连续的红节点, 关键看叔叔){Node* grandfather = parent->_parent;if (parent == grandfather->_left) // 父亲在爷爷的左边 右边就是对称的{Node* uncle = grandfather->_right;// g// p uif (uncle && uncle->_col == RED) // 如果叔叔存在且为红色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = grandfather->_parent;}else { // 叔叔存在且为黑或者不存在 那么旋转+变色// g// p u// c// 单旋if (cur == parent->_left){RotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else {// g// p u// c// 双旋RotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break; // 局部根节点是黑色那么就可以退出了}}else {// g// u pNode* uncle = grandfather->_left;if (uncle && uncle->_col == RED) // 如果叔叔存在且为红色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = grandfather->_parent;}else { // 叔叔存在且为黑或者不存在 那么旋转+变色// g// u p// c// 单旋if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else {// g// u p// c// 双旋RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break; // 局部根节点是黑色那么就可以退出了}}}_root->_col = BLACK;return true;}
五:🔥 红黑树的验证
红黑树的检测分为两步:
- 检测其是否满足二叉搜索树(中序遍历是否为有序序列)
- 检测其是否满足红黑树的性质
具体代码如下:
bool IsBalance(){if (_root == nullptr)return true;if (_root->_col == RED){return false;}// 参考值int refNum = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refNum;}cur = cur->_left;}return Check(_root, 0, refNum);}bool Check(Node* root, int blackNum, const int refNum){if (root == nullptr){//cout << blackNum << endl;if (refNum != blackNum){cout << "存在黑色节点的数量不相等的路径" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << root->_kv.first << "存在连续的红色节点" << '\n';return false;}if (root->_col == BLACK){blackNum++;}return Check(root->_left, blackNum, refNum) && Check(root->_right, blackNum, refNum);}
六:🔥 红黑树的完整代码
#pragma once#include <iostream>
#include <algorithm>
#include <cstring>
#include <set>
#include <map>
#include <assert.h>using namespace std;enum Color
{RED,BLACK
};template<class K, class V>
struct RBTreeNode {pair<K, V> _kv;RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent; Color _col;RBTreeNode(const pair<K, V>& kv):_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr){}
};template<class K, class V>
class RBTree {typedef RBTreeNode<K, V> Node;
public:RBTree() = default;RBTree(const RBTree<K, V>& t){_root = Copy(t._root);}RBTree<K, V>& operator=(RBTree<K, V> t){swap(_root, t._root);return *this;}~RBTree(){Destroy(_root);_root = nullptr;}bool Insert(const pair<K, V>& kv){if (_root == nullptr) {_root = new Node(kv);_root->_col = BLACK;return true;}// 找到插入位置Node* cur = _root, * parent = nullptr;while (cur){if (cur->_kv.first == kv.first) return false;else if (cur->_kv.first < kv.first) {parent = cur;cur = cur->_right;}else {parent = cur;cur = cur->_left;}}cur = new Node(kv);// 新增节点 颜色优先选择红色cur->_col = RED;if (kv.first > parent->_kv.first) parent->_right = cur;else parent->_left = cur;cur->_parent = parent;// 1、parent不存在,cur就是根了,出去后把根处理成黑的// 2、parent存在,且为黑// 3、parent存在,且为红,继续循环处理// 变色了之后持续网上处理while (parent && parent->_col == RED) // 父亲颜色是红色就需要继续处理(来连续的红节点, 关键看叔叔){Node* grandfather = parent->_parent;if (parent == grandfather->_left) // 父亲在爷爷的左边 右边就是对称的{Node* uncle = grandfather->_right;// g// p uif (uncle && uncle->_col == RED) // 如果叔叔存在且为红色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = grandfather->_parent;}else { // 叔叔存在且为黑或者不存在 那么旋转+变色// g// p u// c// 单旋if (cur == parent->_left){RotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else {// g// p u// c// 双旋RotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break; // 局部根节点是黑色那么就可以退出了}}else {// g// u pNode* uncle = grandfather->_left;if (uncle && uncle->_col == RED) // 如果叔叔存在且为红色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = grandfather->_parent;}else { // 叔叔存在且为黑或者不存在 那么旋转+变色// g// u p// c// 单旋if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else {// g// u p// c// 双旋RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break; // 局部根节点是黑色那么就可以退出了}}}_root->_col = BLACK;return true;}Node* Find(const K& key){Node* cur = _root;while (cur){if (cur->_kv.first < key){cur = cur->_right;}else if (cur->_kv.first > key){cur = cur->_left;}else{return cur;}}return nullptr;}Node* Copy(Node * root){if (root == nullptr)return nullptr;Node* newRoot = new Node(root->_kv);newRoot->_left = Copy(root->_left);newRoot->_right = Copy(root->_right);return newRoot;}void Destroy(Node * root){if (root == nullptr)return;Destroy(root->_left);Destroy(root->_right);delete root;}void InOrder(){_InOrder(_root);}int Height(){return _Height(_root);}// 检查是否是红黑树bool IsBalance(){if (_root == nullptr)return true;if (_root->_col == RED){return false;}// 参考值int refNum = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refNum;}cur = cur->_left;}return Check(_root, 0, refNum);}private:bool Check(Node* root, int blackNum, const int refNum){if (root == nullptr){//cout << blackNum << endl;if (refNum != blackNum){cout << "存在黑色节点的数量不相等的路径" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << root->_kv.first << "存在连续的红色节点" << '\n';return false;}if (root->_col == BLACK){blackNum++;}return Check(root->_left, blackNum, refNum) && Check(root->_right, blackNum, refNum);}int _Size(Node* root){return root == nullptr ? 0 : _Size(root->_left) + _Size(root->_right) + 1;}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}void RotateL(Node * parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) subRL->_parent = parent;Node* parent_parent = parent->_parent;subR->_left = parent;parent->_parent = subR;if (parent_parent == nullptr){_root = subR;subR->_parent = nullptr;}else {if (parent == parent_parent->_left) parent_parent->_left = subR;else parent_parent->_right = subR;subR->_parent = parent_parent;}}void RotateR(Node * parent){Node* subL = parent->_left;Node* subLR = parent->_left->_right;parent->_left = subLR;if (subLR) subLR->_parent = parent;Node* parent_parent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent_parent == nullptr){_root = subL;subL->_parent = nullptr;}else {if (parent == parent_parent->_left){parent_parent->_left = subL;}else {parent_parent->_right = subL;}subL->_parent = parent_parent;}}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << '\n';_InOrder(root->_right);}Node* _root = nullptr;};void TestRBTree1()
{RBTree<int, int> t;int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };// int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };for (auto e : a){t.Insert({ e, e });}t.InOrder();cout << t.IsBalance() << endl;
}
以上就是红黑树的讲解与完整实现过程,红黑树因为其自平衡的特性,及通过节点颜色来操作其树形结构的特点,极大的提高了数据存储及处理的效率,需要我们好好掌握,觉得这篇博客对你有帮助的,可以点赞收藏关注支持一波~😉

相关文章:
【C++高阶数据结构】红黑树:全面剖析与深度学习
目录 🚀 前言:红黑树与AVL树的比较一: 🔥 红黑树的概念二: 🔥 红黑树的性质 三: 🔥 红黑树节点的定义和结构🚀 3.1 基本元素🚀 3.2 节点颜色🚀 3.…...

前端基于 axios 实现批量任务调度管理器 demo
一、背景介绍 这是一个基于 axios 实现的批量任务调度管理器的 demo。它使用了axios、promise 等多种技术和原理来实现批量处理多个异步请求,并确保所有请求都能正确处理并报告其状态。 假设有一个场景:有一个任务列表,有单个任务的处理功能…...

Docker容器下面home assistant忘记账号密码怎么重置?
环境: docker ha 问题描述: Docker容器下面home assistant忘记账号密码怎么重置? 解决方案: 你可以按照以下步骤来找回或重置密码: 方法一 (未解决) 停止并删除当前的Home Assistant容器(确保你已经保…...

CTF-NSSCTF[GKCTF 2021]
[GKCTF 2021]easycms 考察: 用扫描工具扫描目录,扫描到后台登录界面/admin.php 题目提示了密码是五位弱口令,试了试弱口令admin和12345直接成功了 任意文件下载 点击设计-->主题然后随便选择一个主题,点击自定义࿰…...

MSA+抑郁症模型总结(一)(论文复现)
MSA抑郁症模型总结(一)(论文复现) 本文所涉及所有资源均在传知代码平台可获取 文章目录 MSA抑郁症模型总结(一)(论文复现)情感分析在多场景的应用一、概述二、论文地址三、研究背景四…...

STM32智能农业灌溉系统教程
目录 引言环境准备智能农业灌溉系统基础代码实现:实现智能农业灌溉系统 4.1 数据采集模块 4.2 数据处理与分析模块 4.3 通信与网络系统实现 4.4 用户界面与数据可视化应用场景:农业监测与优化问题解决方案与优化收尾与总结 1. 引言 智能农业灌溉系统通…...

MySQL存储引擎和
MySQL存储引擎 在数据库中保存的是一张张有着千丝万缕关系的表,所以表设计的好坏,将直接影响着整个数据库。而在设计表的时候,最关注的一个问题是使用什么存储引擎。MySQL中的数据用各种不同的技术存储在文件(或者内存)中。这些技术中的每一种…...

Eclipse 主网向开发者开放
摘要:Eclipse 基金会宣布,Eclipse 主网已经向开发者开放。在接下来几周的时间里,Eclipse 将邀请开发者在主网上部署项目,并参加黑客马拉松活动——“Total Eclipse Challenge”。 Eclipse 是首个基于以太坊的 SVM Layer2 方案&am…...

国内NAT服务器docker方式搭建rustdesk服务
前言 如果遇到10054,就不要设置id服务器!!! 由于遇到大带宽,但是又贵,所以就NAT的啦,但是只有ipv4共享和一个ipv6,带宽50MB(活动免费会升130MB~) https://bigchick.xyz/aff.php?aff322 月付-5 循环 :CM-CQ-Monthly-5 年付-60循环:CM-CQ-Annually-60官方…...

锅总浅析链路追踪技术
链路追踪是什么?常用的链路追踪工具有哪些?它们的异同、架构、工作流程及关键指标有哪些?希望读完本文能帮您解答这些疑惑! 一、链路追踪简介 链路追踪技术(Distributed Tracing)是一种用于监控和分析分布…...

为什么阿里开发手册不建议使用Date类?
在日常编码中,基本上99%的项目都会有一个DateUtil工具类,而时间工具类里用的最多的就是java.util.Date。 大家都这么写,这还能有问题?? 当你的“默认常识”出现问题,这个打击,就是毁灭性的。 …...
中间层 k8s(Kubernetes) 到底是什么,架构是怎么样的?
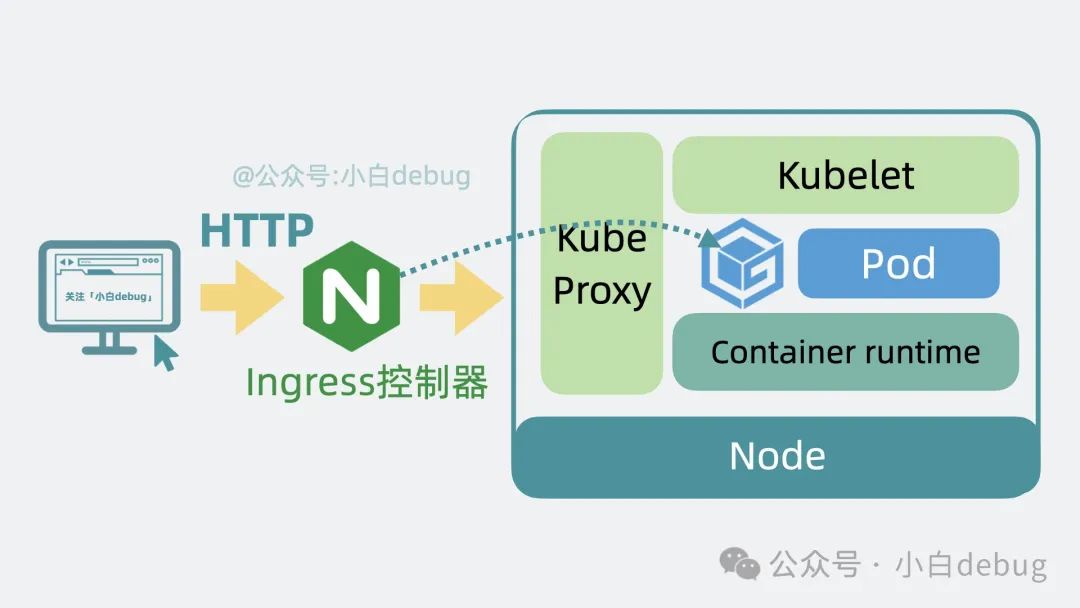
你是一个程序员,你用代码写了一个博客应用服务,并将它部署在了云平台上。 但应用服务太过受欢迎,访问量太大,经常会挂。 所以你用了一些工具自动重启挂掉的应用服务,并且将应用服务部署在了好几个服务器上,…...

【CTFWP】ctfshow-web40
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 题目介绍:题目分析:payload:payload解释:payload2:payload2解释:flag 题目介绍: …...

项目实战1(30小时精通C++和外挂实战)
项目实战1(30小时精通C和外挂实战) 01-MFC1-图标02-MFC2-按钮、调试、打开网页05-MFC5-checkbox及按钮绑定对象06--文件格式、OD序列号08-暴力破解09-CE10-秒杀僵尸 01-MFC1-图标 这个外挂只针对植物大战僵尸游戏 开发这个外挂,首先要将界面…...

百日筑基第三十六天
今日论道还算顺利,只可惜感到也没学到什么东西。晚些时候师祖问话,主要是来这边之后有什么困难之类,好像也没遇到需要他来帮我解决的困难,于是问了些修炼方法之类。...

MySQL: ALTER
正文 在数据库管理系统(DBMS)中,DDL(Data Definition Language)、DCL(Data Control Language)、和 DML(Data Manipulation Language)是三种主要的SQL(Struct…...

微前端技术预研 - bit初体验
1.关于什么是微前端以及微前端的发展, 当前主流框架以及实现技术等,可参考这篇总结(非常全面), 微前端总结:目录详见下图 本文内容主要针对bit框架的实时思路以及具体使用。 1.什么是Bit? Bit 是可组合软件的构建…...

对象关系映射---ORM
一、什么是ORM? ORM(Object Relational Mapping),即对象关系映射,是一种程序设计技术,用于在面向对象编程语言中实现对象和关系型数据库之间的映射。 二、ORM是干什么的? ORM 的主要目的是简…...
Authentication)
Django REST Framework(十七)Authentication
1.认证Authentication 在 Django REST framework (DRF) 中,可以在配置文件中配置全局默认的认证方案。常见的认证方式包括 cookie、session、和 token。DRF 提供了灵活的认证机制,可以在全局配置文件中设置默认认证方式,也可以在具体的视图类…...

FPGA开发——数码管的使用
一、概述 在我们的日常开发中,数字显示的领域中用得最多的就是数码管,这篇文章也是围绕数码管的静态显示和动态显示进行一个讲解。 1、理论 (1)数码管原理图 在对数码管进行相关控制时,其实就是对于8段发光二极管和…...

如何3分钟搞定抖音视频批量下载?完整无水印下载指南
如何3分钟搞定抖音视频批量下载?完整无水印下载指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...

2026实测:租用RTX 4090 CUDA适配与PyTorch精准安装教程
RTX 4090搭载Ada Lovelace架构、4nm制程工艺,配备16384个CUDA核心、24GB GDDR6X显存、1TB/s显存带宽,FP32算力82.6 TFLOPS,是7B-13B大模型训练、图像识别、深度学习推理的核心主流算力。个人开发者、中小团队自建RTX 4090硬件,存在…...

math 7 [parallel lines] 2026.05.22
math 7 [parallel lines] 2026.05.22 平行线练习...

抖音批量下载工具:3步搞定无水印视频批量保存
抖音批量下载工具:3步搞定无水印视频批量保存 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖音…...

5分钟搞定Windows风扇控制:Fan Control终极免费散热优化方案
5分钟搞定Windows风扇控制:Fan Control终极免费散热优化方案 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trend…...

边缘AI算力模组实战:32TOPS性能解析与工业部署指南
1. 项目概述:当边缘计算遇上32TOPS的澎湃动力最近几年,如果你在工业质检、智慧交通或者机器人领域摸爬滚打过,一定会对“边缘智能”这个词深有感触。过去,我们总习惯把海量的视频流、传感器数据一股脑儿往云端服务器上送ÿ…...
 第三篇:STRUCT结构声明全指南:嵌套结构与深层结构的差异与选型)
SAP-ABAP:变量、常量、结构与内表声明(10篇博客合集) 第三篇:STRUCT结构声明全指南:嵌套结构与深层结构的差异与选型
变量、常量、结构与内表声明(10篇博客合集) 第三篇:STRUCT结构声明全指南:嵌套结构与深层结构的差异与选型在ABAP开发中,结构体(Structure)是将多个字段组合成一个逻辑单元的核心手段。从简单的…...

IT运维、远程协助必看!ToDesk录屏功能实测:被控方也能“回放”操作全程
Hello大家,不知道各位有没有注意到,在ToDesk远程控制上新的V4.8.8.9版本中,无论是在基本设置还是在远控连接过程中的悬浮球功能栏里都能看见【录屏设置/开始录屏】这一项!那么,这究竟是何意味呐?又有哪些人…...

手机和电脑怎样换背景颜色?2026 年最全操作指南来了
想要轻松改变设备背景颜色却不知道从何下手?无论你用的是手机还是电脑,换背景颜色其实比你想象的要简单得多。本篇文章将为你详细介绍各种设备和软件上的背景颜色更换方法,帮你快速掌握这项基础操作技能。手机换背景颜色操作方法完全指南iOS …...

免费屏幕标注神器gInk:让你的演示和教学更加生动高效的完整指南
免费屏幕标注神器gInk:让你的演示和教学更加生动高效的完整指南 【免费下载链接】gInk An easy to use on-screen annotation software inspired by Epic Pen. 项目地址: https://gitcode.com/gh_mirrors/gi/gInk 还在为在线会议时无法直观标注屏幕内容而烦恼…...