正点原子imx6ull-mini-Linux驱动之Linux SPI 驱动实验(22)
跟上一章一样,其实这些设备驱动,无非就是传感器对应寄存器的读写。而这个读写是建立在各种通信协议上的,比如上一章的i2c,我们做了什么呢,就是把设备注册成一个i2c平台驱动,这个i2c驱动怎么搞的呢,有个i2c_client 从机的地址放在这个结构体内还有个适配器和算法两个结构体。其他的就是正常的i2c的操作。i2c通信的驱动,已经被SOC厂商写好了,我们做的就是调用其API函数去实现对设备的驱动撰写。等于驱动分层,假如第一层是i2c寄存器的物理属性,那么它在设备树内。第二层是通信协议,被写好了,我们写的是基于这个通信协议的设备驱动。并不直接跟寄存器打交道
上一章我们讲解了如何编写 Linux 下的 I2C 设备驱动,SPI 也是很常用的串行通信协议, 本章我们就来学习如何在 Linux 下编写 SPI 设备驱动。本章实验的最终目的就是驱动 I.MX6UALPHA 开发板上的 ICM-20608 这个 SPI 接口的六轴传感器,可以在应用程序中读取 ICM-20608 的原始传感器数据
1:Linux 下 SPI 驱动框架简介
SPI 驱动框架和 I2C 很类似,都分为主机控制器驱动和设备驱动,主机控制器也就是 SOC 的 SPI 控制器接口。比如在裸机篇中的《第二十七章 SPI 实验》,我们编写了 bsp_spi.c 和 bsp_spi.h 这两个文件,这两个文件是 I.MX6U 的 SPI 控制器驱动,我们编写好 SPI 控制器驱动以后就可 以直接使用了,不管是什么 SPI 设备,SPI 控制器部分的驱动都是一样,我们的重点就落在了 种类繁多的 SPI 设备驱动。
1.1:SPI 主机驱动
SPI 主机驱动就是 SOC 的 SPI 控制器驱动,类似 I2C 驱动里面的适配器驱动。Linux 内核 使用 spi_master 表示 SPI 主机驱动,spi_master 是个结构体,定义在 include/linux/spi/spi.h 文件 中,内容如下(有缩减):
315 struct spi_master {
316 struct device dev;
317
318 struct list_head list;
......
326 s16 bus_num;
327
328 /* chipselects will be integral to many controllers; some others
329 * might use board-specific GPIOs.
330 */
331 u16 num_chipselect;
332
333 /* some SPI controllers pose alignment requirements on DMAable
334 * buffers; let protocol drivers know about these requirements.
335 */
336 u16 dma_alignment;
337
338 /* spi_device.mode flags understood by this controller driver */
339 u16 mode_bits;
340
341 /* bitmask of supported bits_per_word for transfers */
342 u32 bits_per_word_mask;
......
347 /* limits on transfer speed */
348 u32 min_speed_hz;
349 u32 max_speed_hz;
350
351 /* other constraints relevant to this driver */
352 u16 flags;
......
359 /* lock and mutex for SPI bus locking */
360 spinlock_t bus_lock_spinlock;
361 struct mutex bus_lock_mutex;
362
363 /* flag indicating that the SPI bus is locked for exclusive use */
364 bool bus_lock_flag;
......
372 int (*setup)(struct spi_device *spi);
373
......
393 int (*transfer)(struct spi_device *spi,
394 struct spi_message *mesg);
......
434 int (*transfer_one_message)(struct spi_master *master,
435 struct spi_message *mesg);
......
462 };第 393 行,transfer 函数,和 i2c_algorithm 中的 master_xfer 函数一样,控制器数据传输函 数。 第 434 行,transfer_one_message 函数,也用于 SPI 数据发送,用于发送一个 spi_message, SPI 的数据会打包成 spi_message,然后以队列方式发送出去。 也就是 SPI 主机端最终会通过 transfer 函数与 SPI 设备进行通信,因此对于 SPI 主机控制器的驱 动编写者而言 transfer 函数是需要实现的,因为不同的 SOC 其 SPI 控制器不同,寄存器都不一 样。和 I2C 适配器驱动一样,SPI 主机驱动一般都是 SOC 厂商去编写的,所以我们作为 SOC 的 使用者,这一部分的驱动就不用操心了,除非你是在 SOC 原厂工作,内容就是写 SPI 主机驱 动。 SPI 主机驱动的核心就是申请 spi_master,然后初始化 spi_master,最后向 Linux 内核注册 spi_master。
1.1.1:spi_master 申请与释放
spi_alloc_master 函数用于申请 spi_master,函数原型如下:
struct spi_master *spi_alloc_master(struct device *dev,
unsigned size)
函数参数和返回值含义如下:
dev:设备,一般是 platform_device 中的 dev 成员变量。
size:私有数据大小,可以通过 spi_master_get_devdata 函数获取到这些私有数据。
返回值:申请到的 spi_master。 spi_master 的释放通过 spi_master_put 函数来完成,
当我们删除一个 SPI 主机驱动的时候就 需要释放掉前面申请的 spi_master,spi_master_put 函数原型如下:
void spi_master_put(struct spi_master *master)函数参数和返回值含义如下:
master:要释放的 spi_master。
返回值:无。
1.1.2:spi_master 的注册与注销
当 spi_master 初始化完成以后就需要将其注册到 Linux 内核,spi_master 注册函数为 spi_register_master,函数原型如下:
int spi_register_master(struct spi_master *master)函数参数和返回值含义如下:
master:要注册的 spi_master。
返回值:0,成功;负值,失败。
I.MX6U 的 SPI 主机驱动会采用 spi_bitbang_start 这个 API 函数来完成 spi_master 的注册, spi_bitbang_start 函数内部其实也是通过调用 spi_register_master 函数来完成 spi_master 的注册。 如果要注销 spi_master 的话可以使用 spi_unregister_master 函数,此函数原型为:
void spi_unregister_master(struct spi_master *master)函数参数和返回值含义如下:
master:要注销的 spi_master。
返回值:无。
如果使用 spi_bitbang_start 注册 spi_master 的话就要使用 spi_bitbang_stop 来注销掉 spi_master。
1.2:SPI 设备驱动
spi 设备驱动也和 i2c 设备驱动也很类似,Linux 内核使用 spi_driver 结构体来表示 spi 设备 驱动,我们在编写 SPI 设备驱动的时候需要实现 spi_driver。spi_driver 结构体定义在 include/linux/spi/spi.h 文件中,结构体内容如下:
180 struct spi_driver {
181 const struct spi_device_id *id_table;
182 int (*probe)(struct spi_device *spi);
183 int (*remove)(struct spi_device *spi);
184 void (*shutdown)(struct spi_device *spi);
185 struct device_driver driver;
186 };
可以看出,spi_driver 和 i2c_driver、platform_driver 基本一样,当 SPI 设备和驱动匹配成功 以后 probe 函数就会执行。 同样的,spi_driver 初始化完成以后需要向 Linux 内核注册,spi_driver 注册函数为 spi_register_driver,函数原型如下:
int spi_register_driver(struct spi_driver *sdrv)函数参数和返回值含义如下:
sdrv:要注册的 spi_driver。
返回值:0,注册成功;赋值,注册失败。
注销 SPI 设备驱动以后也需要注销掉前面注册的 spi_driver,使用 spi_unregister_driver 函 数完成 spi_driver 的注销,函数原型如下:
void spi_unregister_driver(struct spi_driver *sdrv)
函数参数和返回值含义如下:
sdrv:要注销的 spi_driver。
返回值:无。 spi_driver 注册示例程序如下:
1 /* probe 函数 */
2 static int xxx_probe(struct spi_device *spi)
3 {
4 /* 具体函数内容 */
5 return 0;
6 }
7
8 /* remove 函数 */
9 static int xxx_remove(struct spi_device *spi)
10 {
11 /* 具体函数内容 */
12 return 0;
13 }
14 /* 传统匹配方式 ID 列表 */
15 static const struct spi_device_id xxx_id[] = {
16 {"xxx", 0},
17 {}
18 };
19
20 /* 设备树匹配列表 */
21 static const struct of_device_id xxx_of_match[] = {
22 { .compatible = "xxx" },
23 { /* Sentinel */ }
24 };
25
26 /* SPI 驱动结构体 */
27 static struct spi_driver xxx_driver = {
28 .probe = xxx_probe,
29 .remove = xxx_remove,
30 .driver = {
31 .owner = THIS_MODULE,
32 .name = "xxx",
33 .of_match_table = xxx_of_match,
34 },
35 .id_table = xxx_id,
36 };
37
38 /* 驱动入口函数 */
39 static int __init xxx_init(void)
40 {
41 return spi_register_driver(&xxx_driver);
42 }
43
44 /* 驱动出口函数 */
45 static void __exit xxx_exit(void)
46 {
47 spi_unregister_driver(&xxx_driver);
48 }
49
50 module_init(xxx_init);
51 module_exit(xxx_exit);第 1~36 行,spi_driver 结构体,需要 SPI 设备驱动人员编写,包括匹配表、probe 函数等。 和 i2c_driver、platform_driver 一样,就不详细讲解了。
第 39~42 行,在驱动入口函数中调用 spi_register_driver 来注册 spi_driver。
第 45~48 行,在驱动出口函数中调用 spi_unregister_driver 来注销 spi_driver。
1.3:SPI 设备和驱动匹配过程
SPI 设备和驱动的匹配过程是由 SPI 总线来完成的,这点和 platform、I2C 等驱动一样,SPI 总线为 spi_bus_type,定义在 drivers/spi/spi.c 文件中,内容如下:
131 struct bus_type spi_bus_type = {
132 .name = "spi",
133 .dev_groups = spi_dev_groups,
134 .match = spi_match_device,
135 .uevent = spi_uevent,
136 };可以看出,SPI 设备和驱动的匹配函数为 spi_match_device,函数内容如下:
99 static int spi_match_device(struct device *dev,
struct device_driver *drv)
100 {
101 const struct spi_device *spi = to_spi_device(dev);
102 const struct spi_driver *sdrv = to_spi_driver(drv);
103
104 /* Attempt an OF style match */
105 if (of_driver_match_device(dev, drv))
106 return 1;
107
108 /* Then try ACPI */
109 if (acpi_driver_match_device(dev, drv))
110 return 1;
111
112 if (sdrv->id_table)
113 return !!spi_match_id(sdrv->id_table, spi);
114
115 return strcmp(spi->modalias, drv->name) == 0;
116 }spi_match_device 函数和 i2c_match_device 函数的对于设备和驱动的匹配过程基本一样。
第 105 行,of_driver_match_device 函数用于完成设备树设备和驱动匹配。比较 SPI 设备节 点的 compatible 属性和 of_device_id 中的 compatible 属性是否相等,如果相当的话就表示 SPI 设 备和驱动匹配。
第 109 行,acpi_driver_match_device 函数用于 ACPI 形式的匹配。
第 113 行,spi_match_id 函数用于传统的、无设备树的 SPI 设备和驱动匹配过程。比较 SPI 设备名字和 spi_device_id 的 name 字段是否相等,相等的话就说明 SPI 设备和驱动匹配。
第 115 行,比较 spi_device 中 modalias 成员变量和 device_driver 中的 name 成员变量是否 相等。
2:I.MX6U SPI 主机驱动分析
和 I2C 的适配器驱动一样,SPI 主机驱动一般都由 SOC 厂商编写好了,打开 imx6ull.dtsi 文件,找到如下所示内容:
1 ecspi3: ecspi@02010000 {
2 #address-cells = <1>;
3 #size-cells = <0>;
4 compatible = "fsl,imx6ul-ecspi", "fsl,imx51-ecspi";
5 reg = <0x02010000 0x4000>;
6 interrupts = <GIC_SPI 33 IRQ_TYPE_LEVEL_HIGH>;
7 clocks = <&clks IMX6UL_CLK_ECSPI3>,
8 <&clks IMX6UL_CLK_ECSPI3>;
9 clock-names = "ipg", "per";
10 dmas = <&sdma 7 7 1>, <&sdma 8 7 2>;
11 dma-names = "rx", "tx";
12 status = "disabled";
13 };
重点来看一下第 4 行的 compatible 属性值,compatible 属性有两个值“fsl,imx6ul-ecspi”和 “fsl,imx51-ecspi”,在 Linux 内核源码中搜素这两个属性值即可找到 I.MX6U 对应的 ECSPI(SPI) 主机驱动。I.MX6U 的 ECSPI 主机驱动文件为 drivers/spi/spi-imx.c,在此文件中找到如下内容:
694 static struct platform_device_id spi_imx_devtype[] = {
695 {
696 .name = "imx1-cspi",
697 .driver_data = (kernel_ulong_t) &imx1_cspi_devtype_data,
698 }, {
699 .name = "imx21-cspi",
700 .driver_data = (kernel_ulong_t) &imx21_cspi_devtype_data,
......
713 }, {
714 .name = "imx6ul-ecspi",
715 .driver_data = (kernel_ulong_t) &imx6ul_ecspi_devtype_data,
716 }, {
717 /* sentinel */
718 }
719 };
720
721 static const struct of_device_id spi_imx_dt_ids[] = {
722 { .compatible = "fsl,imx1-cspi", .data =
&imx1_cspi_devtype_data, },
......
728 { .compatible = "fsl,imx6ul-ecspi", .data =
&imx6ul_ecspi_devtype_data, },
729 { /* sentinel */ }
730 };
731 MODULE_DEVICE_TABLE(of, spi_imx_dt_ids);
......
1338 static struct platform_driver spi_imx_driver = {
1339 .driver = {
1340 .name = DRIVER_NAME,
1341 .of_match_table = spi_imx_dt_ids,
1342 .pm = IMX_SPI_PM,
1343 },
1344 .id_table = spi_imx_devtype,
1345 .probe = spi_imx_probe,
1346 .remove = spi_imx_remove,
1347 };
1348 module_platform_driver(spi_imx_driver);第 714 行,spi_imx_devtype 为 SPI 无设备树匹配表。
第 721 行,spi_imx_dt_ids 为 SPI 设备树匹配表。
第 728 行,“fsl,imx6ul-ecspi”匹配项,因此可知 I.MX6U 的 ECSPI 驱动就是 spi-imx.c 这个 文件。
第 1338~1347 行,platform_driver 驱动框架,和 I2C 的适配器驱动一样,SPI 主机驱动器采 用了 platfom 驱动框架。当设备和驱动匹配成功以后 spi_imx_probe 函数就会执行。 spi_imx_probe 函数会从设备树中读取相应的节点属性值,申请并初始化 spi_master,最后 调用 spi_bitbang_start 函数(spi_bitbang_start 会调用 spi_register_master 函数)向 Linux 内核注册 spi_master。 对于 I.MX6U 来讲,SPI 主机的最终数据收发函数为 spi_imx_transfer,此函数通过如下层 层调用最终实现 SPI 数据发送:
spi_imx_transfer-> spi_imx_pio_transfer-> spi_imx_push-> spi_imx->tx
spi_imx 是个 spi_imx_data 类型的机构指针变量,其中 tx 和 rx 这两个成员变量分别为 SPI 数据发送和接收函数。I.MX6U SPI 主机驱动会维护一个 spi_imx_data 类型的变量 spi_imx,并 且使用 spi_imx_setupxfer 函数来设置 spi_imx 的 tx 和 rx 函数。根据要发送的数据数据位宽的不 同,分别有 8 位、16 位和 32 位的发送函数,如下所示:
spi_imx_buf_tx_u8
spi_imx_buf_tx_u16
spi_imx_buf_tx_u32
同理,也有 8 位、16 位和 32 位的数据接收函数,如下所示:
spi_imx_buf_rx_u8
spi_imx_buf_rx_u16
spi_imx_buf_rx_u32我们就以 spi_imx_buf_tx_u8 这个函数为例,看看,一个自己的数据发送是怎么完成的,在 spi-imx.c 文件中找到如下所示内容:
152 #define MXC_SPI_BUF_TX(type) \
153 static void spi_imx_buf_tx_##type(struct spi_imx_data *spi_imx) \
154 { \
155 type val = 0; \
156 \
157 if (spi_imx->tx_buf) { \
158 val = *(type *)spi_imx->tx_buf; \
159 spi_imx->tx_buf += sizeof(type); \
160 } \
161 \
162 spi_imx->count -= sizeof(type); \
163 \
164 writel(val, spi_imx->base + MXC_CSPITXDATA); \
165 }
166
167 MXC_SPI_BUF_RX(u8)
168 MXC_SPI_BUF_TX(u8)
从示例代码 62.2.3 可以看出,spi_imx_buf_tx_u8 函数是通过 MXC_SPI_BUF_TX 宏来实现 的。第 164 行就是将要发送的数据值写入到 ECSPI 的 TXDATA 寄存器里面去,这和我们 SPI 裸 机实验的方法一样。将第 168 行的 MXC_SPI_BUF_TX(u8)展开就是 spi_imx_buf_tx_u8 函数。 其他的 tx 和 rx 函数都是这样实现的,这里就不做介绍了。关于 I.MX6U 的主机驱动程序就讲 解到这里,基本套路和 I2C 的适配器驱动程序类似。
3:SPI 设备驱动编写流程
3.1:SPI 设备信息描述
3.1.1:IO 的 pinctrl 子节点创建与修改
首先肯定是根据所使用的 IO 来创建或修改 pinctrl 子节点,这个没什么好说的,唯独要注意的就是检查相应的 IO 有没有被其他的设备所使用,如果有的话需要将其删除掉
3.1.2:SPI 设备节点的创建与修改
采用设备树的情况下,SPI 设备信息描述就通过创建相应的设备子节点来完成,我们可以 打开 imx6qdl-sabresd.dtsi 这个设备树头文件,在此文件里面找到如下所示内容:
308 &ecspi1 {
309 fsl,spi-num-chipselects = <1>;
310 cs-gpios = <&gpio4 9 0>;
311 pinctrl-names = "default";
312 pinctrl-0 = <&pinctrl_ecspi1>;
313 status = "okay";
314
315 flash: m25p80@0 {
316 #address-cells = <1>;
317 #size-cells = <1>;
318 compatible = "st,m25p32";
319 spi-max-frequency = <20000000>;
320 reg = <0>;
321 };
322 };
示例代码 62.3.1.1 是 I.MX6Q 的一款板子上的一个 SPI 设备节点,在这个板子的 ECSPI 接 口上接了一个 m25p80,这是一个 SPI 接口的设备。
第 309 行,设置“fsl,spi-num-chipselects”属性为 1,表示只有一个设备。
第 310 行,设置“cs-gpios”属性,也就是片选信号为 GPIO4_IO09。
第 311 行,设置“pinctrl-names”属性,也就是 SPI 设备所使用的 IO 名字。
第 312 行,设置“pinctrl-0”属性,也就是所使用的 IO 对应的 pinctrl 节点。
第 313 行,将 ecspi1 节点的“status”属性改为“okay”。
第 315~320 行,ecspi1 下的 m25p80 设备信息,每一个 SPI 设备都采用一个子节点来描述 其设备信息。
第 315 行的“m25p80@0”后面的“0”表示 m25p80 的接到了 ECSPI 的通道 0 上。这个要根据自己的具体硬件来设置。
第 318 行,SPI 设备的 compatible 属性值,用于匹配设备驱动。
第 319 行,“spi-max-frequency”属性设置 SPI 控制器的最高频率,这个要根据所使用的 SPI 设备来设置,比如在这里将 SPI 控制器最高频率设置为 20MHz。
第 320 行,reg 属性设置 m25p80 这个设备所使用的 ECSPI 通道,和“m25p80@0”后面的 “0”一样。 我们一会在编写 ICM20608 的设备树节点信息的时候就参考示例代码 62.3.1.1 中的内容即 可。
3.2:SPI 设备数据收发处理流程
SPI 设备驱动的核心是 spi_driver,这个我们已经在 62.1.2 小节讲过了。当我们向 Linux 内 核注册成功 spi_driver 以后就可以使用 SPI 核心层提供的 API 函数来对设备进行读写操作了。 首先是 spi_transfer 结构体,此结构体用于描述 SPI 传输信息,结构体内容如下
603 struct spi_transfer {
604 /* it's ok if tx_buf == rx_buf (right?)
605 * for MicroWire, one buffer must be null
606 * buffers must work with dma_*map_single() calls, unless
607 * spi_message.is_dma_mapped reports a pre-existing mapping
608 */
609 const void *tx_buf;
610 void *rx_buf;
611 unsigned len;
612
613 dma_addr_t tx_dma;
614 dma_addr_t rx_dma;
615 struct sg_table tx_sg;
616 struct sg_table rx_sg;
617
618 unsigned cs_change:1;
619 unsigned tx_nbits:3;
620 unsigned rx_nbits:3;
621 #define SPI_NBITS_SINGLE 0x01 /* 1bit transfer */
622 #define SPI_NBITS_DUAL 0x02 /* 2bits transfer */
623 #define SPI_NBITS_QUAD 0x04 /* 4bits transfer */
624 u8 bits_per_word;
625 u16 delay_usecs;
626 u32 speed_hz;
627
628 struct list_head transfer_list;
629 };第 609 行,tx_buf 保存着要发送的数据。(指针前面加了一个const表示指针指向一个常量,这个值不能改。也就是固定指向)
第 610 行,rx_buf 用于保存接收到的数据。
第 611 行,len 是要进行传输的数据长度,SPI 是全双工通信,因此在一次通信中发送和 接收的字节数都是一样的,所以 spi_transfer 中也就没有发送长度和接收长度之分。
spi_transfer 需要组织成 spi_message,spi_message 也是一个结构体,内容如下:
660 struct spi_message {
661 struct list_head transfers;
662
663 struct spi_device *spi;
664
665 unsigned is_dma_mapped:1;
......
678 /* completion is reported through a callback */
679 void (*complete)(void *context);
680 void *context;
681 unsigned frame_length;
682 unsigned actual_length;
683 int status;
684
685 /* for optional use by whatever driver currently owns the
686 * spi_message ... between calls to spi_async and then later
687 * complete(), that's the spi_master controller driver.
688 */
689 struct list_head queue;
690 void *state;
691 };在使用spi_message之前需要对其进行初始化,spi_message初始化函数为spi_message_init, 函数原型如下:
void spi_message_init(struct spi_message *m)函数参数和返回值含义如下:
m:要初始化的 spi_message。
返回值:无。
spi_message 初始化完成以后需要将 spi_transfer 添加到 spi_message 队列中,这里我们要用 到 spi_message_add_tail 函数,此函数原型如下:
跟i2c的msg很像是吧,i2c要指定读还是写,从机地址,发送长度,读取或发送的地址
void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m)函数参数和返回值含义如下
: t:要添加到队列中的 spi_transfer。
m:spi_transfer 要加入的 spi_message。
返回值:无。
spi_message 准备好以后既可以进行数据传输了,数据传输分为同步传输和异步传输,同步 传输会阻塞的等待 SPI 数据传输完成,同步传输函数为 spi_sync,函数原型如下:
int spi_sync(struct spi_device *spi, struct spi_message *message)
函数参数和返回值含义如下:
spi:要进行数据传输的 spi_device。
message:要传输的 spi_message。
返回值:无。
异步传输不会阻塞的等到 SPI 数据传输完成,异步传输需要设置 spi_message 中的 complete 成员变量,complete 是一个回调函数,当 SPI 异步传输完成以后此函数就会被调用。SPI 异步传 输函数为 spi_async,函数原型如下:
int spi_async(struct spi_device *spi, struct spi_message *message)
函数参数和返回值含义如下:
spi:要进行数据传输的 spi_device。
message:要传输的 spi_message。
返回值:无。
在本章实验中,我们采用同步传输方式来完成 SPI 数据的传输工作,也就是 spi_sync 函数。 综上所述,SPI 数据传输步骤如下:
①、申请并初始化 spi_transfer,设置 spi_transfer 的 tx_buf 成员变量,tx_buf 为要发送的数 据。然后设置 rx_buf 成员变量,rx_buf 保存着接收到的数据。最后设置 len 成员变量,也就是 要进行数据通信的长度。
②、使用 spi_message_init 函数初始化 spi_message。
③、使用spi_message_add_tail函数将前面设置好的spi_transfer添加到spi_message队列中。 ④、使用 spi_sync 函数完成 SPI 数据同步传输。 通过 SPI 进行 n 个字节的数据发送和接收的示例代码如下所示:
/* SPI 多字节发送 */
static int spi_send(struct spi_device *spi, u8 *buf, int len)
{int ret;struct spi_message m;struct spi_transfer t = {.tx_buf = buf,.len = len,};spi_message_init(&m); /* 初始化 spi_message */spi_message_add_tail(t, &m);/* 将 spi_transfer 添加到 spi_message 队列 */ret = spi_sync(spi, &m); /* 同步传输 */return ret;
}
/* SPI 多字节接收 */
static int spi_receive(struct spi_device *spi, u8 *buf, int len)
{int ret;struct spi_message m;struct spi_transfer t = {.rx_buf = buf,.len = len,};spi_message_init(&m); /* 初始化 spi_message */spi_message_add_tail(t, &m);/* 将 spi_transfer 添加到 spi_message 队列 */ret = spi_sync(spi, &m); /* 同步传输 */return ret;
}4:试验程序编写
其实mini也没有这个传感器,可以自己用杜邦线外扩一个,当然要在设备树内保证所用IO没被其他外设占用。片选的化就默认接地,然后就是那两根数据线,和一个VCC了。
原来学stm32的w25q64模块就可以接。i2c是那个ATc02好像,一个是flash一个是eeprom
4.1:修改设备树
4.1.1:添加 ICM20608 所使用的 IO
首先在 imx6ull-alientek-emmc.dts 文件中添加 ICM20608 所使用的 IO 信息,在 iomuxc 节点 中添加一个新的子节点来描述 ICM20608 所使用的 SPI 引脚,子节点名字为 pinctrl_ecspi3,节 点内容如下所示:
1 pinctrl_ecspi3: icm20608 {
2 fsl,pins = <
3 MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x10b0 /* CS */
4 MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x10b1 /* SCLK */
5 MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x10b1 /* MISO */
6 MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x10b1 /* MOSI */
7 >;
8 };
UART2_TX_DATA 这个 IO 是 ICM20608 的片选信号,这里我们并没有将其复用为 ECSPI3 的 SS0 信号,而是将其复用为了普通的 GPIO。因为我们需要自己控制片选信号,所以将其复 用为普通的 GPIO。
4.1.2:在 ecspi3 节点追加 icm20608 子节点
在 imx6ull-alientek-emmc.dts 文件中并没有任何向 ecspi3 节点追加内容的代码,这是因为 NXP 官方的 6ULL EVK 开发板上没有连接 SPI 设备。在 imx6ull-alientek-emmc.dts 文件最后面 加入如下所示内容:
1 &ecspi3 {
2 fsl,spi-num-chipselects = <1>;
3 cs-gpios = <&gpio1 20 GPIO_ACTIVE_LOW>;
4 pinctrl-names = "default";
5 pinctrl-0 = <&pinctrl_ecspi3>;
6 status = "okay";
7
8 spidev: icm20608@0 {
9 compatible = "alientek,icm20608";
10 spi-max-frequency = <8000000>;
11 reg = <0>;
12 };
13 };
第 2 行,设置当前片选数量为 1,因为就只接了一个 ICM20608。
第 3 行,一定要使用 “cs-gpios”属性来描述片选引脚,SPI 主机驱动就会控制片选引脚。
第 5 行,设置 IO 要使用的 pinctrl 子节点,也就是我们在示例代码 62.5.1.1 中新建的 pinctrl_ecspi3。
第 6 行,imx6ull.dtsi 文件中默认将 ecspi3 节点状态(status)设置为“disable”,这里我们要将 其改为“okay”。
第 8~12 行,icm20608 设备子节点,因为 icm20608 连接在 ECSPI3 的第 0 个通道上,因此 @后面为 0。第 9 行设置节点属性兼容值为“alientek,icm20608”,
第 10 行设置 SPI 最大时钟频 率为 8MHz,这是 ICM20608 的 SPI 接口所能支持的最大的时钟频率。
第 11 行,icm20608 连接 在通道 0 上,因此 reg 为 0。 imx6ull-alientek-emmc.dts 文件修改完成以后重新编译一下,得到新的 dtb 文件,并使用新 的 dtb 启动 Linux 系统。
4.2:编写 ICM20608 驱动
新建名为“22_spi”的文件夹,然后在 22_spi 文件夹里面创建 vscode 工程,工作区命名为 “spi”。工程创建好以后新建 icm20608.c 和 icm20608reg.h 这两个文件,icm20608.c 为 ICM20608 的驱动代码,icm20608reg.h 是 ICM20608 寄存器头文件。先在 icm20608reg.h 中定义好 ICM20608 的寄存器,输入如下内容(有省略,完整的内容请参考例程):
#ifndef ICM20608_H
#define ICM20608_H
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : icm20608reg.h
作者 : 左忠凯
版本 : V1.0
描述 : ICM20608寄存器地址描述头文件
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/2 左忠凯创建
***************************************************************/
#define ICM20608G_ID 0XAF /* ID值 */
#define ICM20608D_ID 0XAE /* ID值 *//* ICM20608寄存器 *复位后所有寄存器地址都为0,除了*Register 107(0X6B) Power Management 1 = 0x40*Register 117(0X75) WHO_AM_I = 0xAF或0xAE*/
/* 陀螺仪和加速度自测(出产时设置,用于与用户的自检输出值比较) */
#define ICM20_SELF_TEST_X_GYRO 0x00
#define ICM20_SELF_TEST_Y_GYRO 0x01
#define ICM20_SELF_TEST_Z_GYRO 0x02
#define ICM20_SELF_TEST_X_ACCEL 0x0D
#define ICM20_SELF_TEST_Y_ACCEL 0x0E
#define ICM20_SELF_TEST_Z_ACCEL 0x0F/* 陀螺仪静态偏移 */
#define ICM20_XG_OFFS_USRH 0x13
#define ICM20_XG_OFFS_USRL 0x14
#define ICM20_YG_OFFS_USRH 0x15
#define ICM20_YG_OFFS_USRL 0x16
#define ICM20_ZG_OFFS_USRH 0x17
#define ICM20_ZG_OFFS_USRL 0x18#define ICM20_SMPLRT_DIV 0x19
#define ICM20_CONFIG 0x1A
#define ICM20_GYRO_CONFIG 0x1B
#define ICM20_ACCEL_CONFIG 0x1C
#define ICM20_ACCEL_CONFIG2 0x1D
#define ICM20_LP_MODE_CFG 0x1E
#define ICM20_ACCEL_WOM_THR 0x1F
#define ICM20_FIFO_EN 0x23
#define ICM20_FSYNC_INT 0x36
#define ICM20_INT_PIN_CFG 0x37
#define ICM20_INT_ENABLE 0x38
#define ICM20_INT_STATUS 0x3A/* 加速度输出 */
#define ICM20_ACCEL_XOUT_H 0x3B
#define ICM20_ACCEL_XOUT_L 0x3C
#define ICM20_ACCEL_YOUT_H 0x3D
#define ICM20_ACCEL_YOUT_L 0x3E
#define ICM20_ACCEL_ZOUT_H 0x3F
#define ICM20_ACCEL_ZOUT_L 0x40/* 温度输出 */
#define ICM20_TEMP_OUT_H 0x41
#define ICM20_TEMP_OUT_L 0x42/* 陀螺仪输出 */
#define ICM20_GYRO_XOUT_H 0x43
#define ICM20_GYRO_XOUT_L 0x44
#define ICM20_GYRO_YOUT_H 0x45
#define ICM20_GYRO_YOUT_L 0x46
#define ICM20_GYRO_ZOUT_H 0x47
#define ICM20_GYRO_ZOUT_L 0x48#define ICM20_SIGNAL_PATH_RESET 0x68
#define ICM20_ACCEL_INTEL_CTRL 0x69
#define ICM20_USER_CTRL 0x6A
#define ICM20_PWR_MGMT_1 0x6B
#define ICM20_PWR_MGMT_2 0x6C
#define ICM20_FIFO_COUNTH 0x72
#define ICM20_FIFO_COUNTL 0x73
#define ICM20_FIFO_R_W 0x74
#define ICM20_WHO_AM_I 0x75/* 加速度静态偏移 */
#define ICM20_XA_OFFSET_H 0x77
#define ICM20_XA_OFFSET_L 0x78
#define ICM20_YA_OFFSET_H 0x7A
#define ICM20_YA_OFFSET_L 0x7B
#define ICM20_ZA_OFFSET_H 0x7D
#define ICM20_ZA_OFFSET_L 0x7E#endif接下来继续编写 icm20608.c 文件,因为 icm20608.c 文件内容比较长,因此这里就将其分开 来讲解。
4.2.1:icm20608 设备结构体创建
首先创建一个 icm20608 设备结构体,如下所示:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <linux/spi/spi.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/platform_device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include "icm20608reg.h"
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : icm20608.c
作者 : 左忠凯
版本 : V1.0
描述 : ICM20608 SPI驱动程序
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/2 左忠凯创建
***************************************************************/
#define ICM20608_CNT 1
#define ICM20608_NAME "icm20608"struct icm20608_dev {dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */struct device_node *nd; /* 设备节点 */int major; /* 主设备号 */void *private_data; /* 私有数据 */signed int gyro_x_adc; /* 陀螺仪X轴原始值 */signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */signed int accel_x_adc; /* 加速度计X轴原始值 */signed int accel_y_adc; /* 加速度计Y轴原始值 */signed int accel_z_adc; /* 加速度计Z轴原始值 */signed int temp_adc; /* 温度原始值 */
};static struct icm20608_dev icm20608dev;icm20608 的设备结构体 icm20608_dev 没什么好讲的,重点看一下第 44 行的 private_data, 对于 SPI 设备驱动来讲最核心的就是 spi_device。probe 函数会向驱动提供当前 SPI 设备对应的 spi_device,因此在 probe 函数中设置 private_data 为 probe 函数传递进来的 spi_device 参数。
4.2.2:icm20608 的 spi_driver 注册与注销
对于 SPI 设备驱动,首先就是要初始化并向系统注册 spi_driver,icm20608 的 spi_driver 初 始化、注册与注销代码如下:
/* 传统匹配方式ID列表 */
static const struct spi_device_id icm20608_id[] = {{"alientek,icm20608", 0}, {}
};/* 设备树匹配列表 */
static const struct of_device_id icm20608_of_match[] = {{ .compatible = "alientek,icm20608" },{ /* Sentinel */ }
};/* SPI驱动结构体 */
static struct spi_driver icm20608_driver = {.probe = icm20608_probe,.remove = icm20608_remove,.driver = {.owner = THIS_MODULE,.name = "icm20608",.of_match_table = icm20608_of_match, },.id_table = icm20608_id,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init icm20608_init(void)
{return spi_register_driver(&icm20608_driver);
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit icm20608_exit(void)
{spi_unregister_driver(&icm20608_driver);
}module_init(icm20608_init);
module_exit(icm20608_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");第 2~5 行,传统的设备和驱动匹配表。
第 8~11 行,设备树的设备与驱动匹配表,这里只有一个匹配项:“alientek,icm20608”。
第 14~23 行,icm20608 的 spi_driver 结构体变量,当 icm20608 设备和此驱动匹配成功以后 第 15 行的 icm20608_probe 函数就会执行。同样的,当注销此驱动的时候 icm20608_remove 函 数会执行。
第 30~33 行,icm20608_init 函数为 icm20608 的驱动入口函数,在此函数中使用 spi_register_driver 向 Linux 系统注册上面定义的 icm20608_driver。
第 40~43 行,icm20608_exit 函数为 icm20608 的驱动出口函数,在此函数中使用 spi_unregister_driver 注销掉前面注册的 icm20608_driver。
4.2.3:probe&remove 函数
icm20608_driver 中的 probe 和 remove 函数内容如下所示:
/** @description : spi驱动的probe函数,当驱动与* 设备匹配以后此函数就会执行* @param - client : i2c设备* @param - id : i2c设备ID* */
static int icm20608_probe(struct spi_device *spi)
{/* 1、构建设备号 */if (icm20608dev.major) {icm20608dev.devid = MKDEV(icm20608dev.major, 0);register_chrdev_region(icm20608dev.devid, ICM20608_CNT, ICM20608_NAME);} else {alloc_chrdev_region(&icm20608dev.devid, 0, ICM20608_CNT, ICM20608_NAME);icm20608dev.major = MAJOR(icm20608dev.devid);}/* 2、注册设备 */cdev_init(&icm20608dev.cdev, &icm20608_ops);cdev_add(&icm20608dev.cdev, icm20608dev.devid, ICM20608_CNT);/* 3、创建类 */icm20608dev.class = class_create(THIS_MODULE, ICM20608_NAME);if (IS_ERR(icm20608dev.class)) {return PTR_ERR(icm20608dev.class);}/* 4、创建设备 */icm20608dev.device = device_create(icm20608dev.class, NULL, icm20608dev.devid, NULL, ICM20608_NAME);if (IS_ERR(icm20608dev.device)) {return PTR_ERR(icm20608dev.device);}/*初始化spi_device */spi->mode = SPI_MODE_0; /*MODE0,CPOL=0,CPHA=0*/spi_setup(spi);icm20608dev.private_data = spi; /* 设置私有数据 *//* 初始化ICM20608内部寄存器 */icm20608_reginit(); return 0;
}/** @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行* @param - client : i2c设备* @return : 0,成功;其他负值,失败*/
static int icm20608_remove(struct spi_device *spi)
{/* 删除设备 */cdev_del(&icm20608dev.cdev);unregister_chrdev_region(icm20608dev.devid, ICM20608_CNT);/* 注销掉类和设备 */device_destroy(icm20608dev.class, icm20608dev.devid);class_destroy(icm20608dev.class);return 0;
}第 8~43 行,probe 函数,当设备与驱动匹配成功以后此函数就会执行,第 10~33 行都是标 准的注册字符设备驱动。
第 36 行,设置 SPI 为模式 0,也就是 CPOL=0,CPHA=0。(空闲状态低电平,第一个前沿采样(也就是上升沿))

第 37 行,设置好 spi_device 以后需要使用 spi_setup 配置一下。 第 38 行,设置 icm20608dev 的 private_data 成员变量为 spi_device。
第 41 行,调用 icm20608_reginit 函数初始化 ICM20608,主要是初始化 ICM20608 指定寄 存器。
第 50~60 行,icm20608_remove 函数,注销驱动的时候此函数就会执行。
4.2.4:icm20608 寄存器读写与初始化
/** @description : 从icm20608读取多个寄存器数据* @param - dev: icm20608设备* @param - reg: 要读取的寄存器首地址* @param - val: 读取到的数据* @param - len: 要读取的数据长度* @return : 操作结果*/
static int icm20608_read_regs(struct icm20608_dev *dev, u8 reg, void *buf, int len)
{int ret = -1;unsigned char txdata[1];unsigned char * rxdata;struct spi_message m;struct spi_transfer *t;struct spi_device *spi = (struct spi_device *)dev->private_data;t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); /* 申请内存 */if(!t) {return -ENOMEM;}rxdata = kzalloc(sizeof(char) * len, GFP_KERNEL); /* 申请内存 */if(!rxdata) {goto out1;}/* 一共发送len+1个字节的数据,第一个字节为寄存器首地址,一共要读取len个字节长度的数据,*/txdata[0] = reg | 0x80; /* 写数据的时候首寄存器地址bit8要置1 */ t->tx_buf = txdata; /* 要发送的数据 */t->rx_buf = rxdata; /* 要读取的数据 */t->len = len+1; /* t->len=发送的长度+读取的长度 */spi_message_init(&m); /* 初始化spi_message */spi_message_add_tail(t, &m);/* 将spi_transfer添加到spi_message队列 */ret = spi_sync(spi, &m); /* 同步发送 */if(ret) {goto out2;}memcpy(buf , rxdata+1, len); /* 只需要读取的数据 */out2:kfree(rxdata); /* 释放内存 */
out1: kfree(t); /* 释放内存 */return ret;
}/** @description : 向icm20608多个寄存器写入数据* @param - dev: icm20608设备* @param - reg: 要写入的寄存器首地址* @param - val: 要写入的数据缓冲区* @param - len: 要写入的数据长度* @return : 操作结果*/
static s32 icm20608_write_regs(struct icm20608_dev *dev, u8 reg, u8 *buf, u8 len)
{int ret = -1;unsigned char *txdata;struct spi_message m;struct spi_transfer *t;struct spi_device *spi = (struct spi_device *)dev->private_data;t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); /* 申请内存 */if(!t) {return -ENOMEM;}txdata = kzalloc(sizeof(char)*len, GFP_KERNEL);if(!txdata) {goto out1;}/* 一共发送len+1个字节的数据,第一个字节为寄存器首地址,len为要写入的寄存器的集合,*/*txdata = reg & ~0x80; /* 写数据的时候首寄存器地址bit8要清零 */memcpy(txdata+1, buf, len); /* 把len个寄存器拷贝到txdata里,等待发送 */t->tx_buf = txdata; /* 要发送的数据 */t->len = len+1; /* t->len=发送的长度+读取的长度 */spi_message_init(&m); /* 初始化spi_message */spi_message_add_tail(t, &m);/* 将spi_transfer添加到spi_message队列 */ret = spi_sync(spi, &m); /* 同步发送 */if(ret) {goto out2;}out2:kfree(txdata); /* 释放内存 */
out1:kfree(t); /* 释放内存 */return ret;
}/** @description : 读取icm20608指定寄存器值,读取一个寄存器* @param - dev: icm20608设备* @param - reg: 要读取的寄存器* @return : 读取到的寄存器值*/
static unsigned char icm20608_read_onereg(struct icm20608_dev *dev, u8 reg)
{u8 data = 0;icm20608_read_regs(dev, reg, &data, 1);return data;
}/** @description : 向icm20608指定寄存器写入指定的值,写一个寄存器* @param - dev: icm20608设备* @param - reg: 要写的寄存器* @param - data: 要写入的值* @return : 无*/ static void icm20608_write_onereg(struct icm20608_dev *dev, u8 reg, u8 value)
{u8 buf = value;icm20608_write_regs(dev, reg, &buf, 1);
}/** @description : 读取ICM20608的数据,读取原始数据,包括三轴陀螺仪、* : 三轴加速度计和内部温度。* @param - dev : ICM20608设备* @return : 无。*/
void icm20608_readdata(struct icm20608_dev *dev)
{unsigned char data[14] = { 0 };icm20608_read_regs(dev, ICM20_ACCEL_XOUT_H, data, 14);dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]); dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]); dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]); dev->temp_adc = (signed short)((data[6] << 8) | data[7]); dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]); dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
}第 9~50 行,icm20608_read_regs 函数,从 icm20608 中读取连续多个寄存器数据;注意: 在本实验中,SPI 为全双工通讯没有所谓的发送和接收长度之分。要读取或者发送 N 个字节就 要封装 N+1 个字节,第 1 个字节是告诉设备我们要进行读还是写,后面的 N 个字节才是我们 要读或者发送的数据。因为是读操作,因此在第 31 行设置第一个数据 bit7 位 1,表示读操作。
第 60~96 行,icm20608_write_regs 函数,向 icm20608 连续写入多个寄存器数据。此函数和 icm20608_read_regs 函数区别不大。
第 104~109 行,icm20608_read_onereg 函数,读取 icm20608 指定寄存器数据。
第 119~123 行,icm20608_write_onereg 函数,向 icm20608 指定寄存器写入数据。
第 131~143 行,icm20608_readdata 函数,读取 icm20608 六轴传感器和温度传感器原始数 据值,应用程序读取 icm20608 的时候这些传感器原始数据就会上报给应用程序。
第 150~170 行,icm20608_reginit 函数,初始化 icm20608,和我们 spi 裸机实验里面的初始 化过程一样。
4.2.5:字符设备驱动框架
icm20608 的字符设备驱动框架如下:
/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做pr似有ate_data的成员变量* 一般在open的时候将private_data似有向设备结构体。* @return : 0 成功;其他 失败*/
static int icm20608_open(struct inode *inode, struct file *filp)
{filp->private_data = &icm20608dev; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t icm20608_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{signed int data[7];long err = 0;struct icm20608_dev *dev = (struct icm20608_dev *)filp->private_data;icm20608_readdata(dev);data[0] = dev->gyro_x_adc;data[1] = dev->gyro_y_adc;data[2] = dev->gyro_z_adc;data[3] = dev->accel_x_adc;data[4] = dev->accel_y_adc;data[5] = dev->accel_z_adc;data[6] = dev->temp_adc;err = copy_to_user(buf, data, sizeof(data));return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int icm20608_release(struct inode *inode, struct file *filp)
{return 0;
}/* icm20608操作函数 */
static const struct file_operations icm20608_ops = {.owner = THIS_MODULE,.open = icm20608_open,.read = icm20608_read,.release = icm20608_release,
};
字符设备驱动框架没什么好说的,重点是第 22~38 行的 icm20608_read 函数,当应用程序 调用 read 函数读取 icm20608 设备文件的时候此函数就会执行。此函数调用上面编写好的 icm20608_readdata 函数读取 icm20608 的原始数据并将其上报给应用程序。大家注意,在内核 中尽量不要使用浮点运算,所以不要在驱动将 icm20608 的原始值转换为对应的实际值,因为会 涉及到浮点计算。
4.3:编写测试 APP
新建 icm20608App.c 文件,然后在里面输入如下所示内容:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : icm20608App.c
作者 : 左忠凯
版本 : V1.0
描述 : icm20608设备测试APP。
其他 : 无
使用方法 :./icm20608App /dev/icm20608
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/20 左忠凯创建
***************************************************************//** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd;char *filename;signed int databuf[7];unsigned char data[14];signed int gyro_x_adc, gyro_y_adc, gyro_z_adc;signed int accel_x_adc, accel_y_adc, accel_z_adc;signed int temp_adc;float gyro_x_act, gyro_y_act, gyro_z_act;float accel_x_act, accel_y_act, accel_z_act;float temp_act;int ret = 0;if (argc != 2) {printf("Error Usage!\r\n");return -1;}filename = argv[1];fd = open(filename, O_RDWR);if(fd < 0) {printf("can't open file %s\r\n", filename);return -1;}while (1) {ret = read(fd, databuf, sizeof(databuf));if(ret == 0) { /* 数据读取成功 */gyro_x_adc = databuf[0];gyro_y_adc = databuf[1];gyro_z_adc = databuf[2];accel_x_adc = databuf[3];accel_y_adc = databuf[4];accel_z_adc = databuf[5];temp_adc = databuf[6];/* 计算实际值 */gyro_x_act = (float)(gyro_x_adc) / 16.4;gyro_y_act = (float)(gyro_y_adc) / 16.4;gyro_z_act = (float)(gyro_z_adc) / 16.4;accel_x_act = (float)(accel_x_adc) / 2048;accel_y_act = (float)(accel_y_adc) / 2048;accel_z_act = (float)(accel_z_adc) / 2048;temp_act = ((float)(temp_adc) - 25 ) / 326.8 + 25;printf("\r\n原始值:\r\n");printf("gx = %d, gy = %d, gz = %d\r\n", gyro_x_adc, gyro_y_adc, gyro_z_adc);printf("ax = %d, ay = %d, az = %d\r\n", accel_x_adc, accel_y_adc, accel_z_adc);printf("temp = %d\r\n", temp_adc);printf("实际值:");printf("act gx = %.2f°/S, act gy = %.2f°/S, act gz = %.2f°/S\r\n", gyro_x_act, gyro_y_act, gyro_z_act);printf("act ax = %.2fg, act ay = %.2fg, act az = %.2fg\r\n", accel_x_act, accel_y_act, accel_z_act);printf("act temp = %.2f°C\r\n", temp_act);}usleep(100000); /*100ms */}close(fd); /* 关闭文件 */ return 0;
}第 60~91 行,在 while 循环中每隔 100ms 从 icm20608 中读取一次数据,读取到 icm20608 原始数据以后将其转换为实际值,比如陀螺仪就是角速度、加速度计就是 g 值。注意,我们在 icm20608 驱动中将陀螺仪和加速度计的测量范围全部设置到了最大,分别为±2000 和±16g。 因此,在计算实际值的时候陀螺仪使用 16.4,加速度计使用 2048。最终将传感器原始数据和得 到的实际值显示在终端上。
5:运行测试
5.1:编写 Makefile 文件
编写 Makefile 文件,本章实验的 Makefile 文件和第四十章实验基本一样,只是将 obj-m 变 量的值改为“icm20608.o”,Makefile 内容如下所示:
KERNELDIR := /home/zuozhongkai/linux/IMX6ULL/linux/temp/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)obj-m := icm20608.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean第 4 行,设置 obj-m 变量的值为“icm20608.o”。
5.2:编译测试 APP
在 icm20608App.c 这个测试 APP 中我们用到了浮点计算,而 I.MX6U 是支持硬件浮点的, 因此我们在编译 icm20608App.c 的时候就可以使能硬件浮点,这样可以加速浮点计算。使能硬 件浮点很简单,在编译的时候加入如下参数即可:
-march-armv7-a -mfpu-neon -mfloat=hard输入如下命令使能硬件浮点编译 icm20608App.c 这个测试程序:
arm-linux-gnueabihf-gcc -march=armv7-a -mfpu=neon -mfloat-abi=hard icm20608App.c -o
icm20608App编译成功以后就会生成 icm20608App 这个应用程序,那么究竟有没有使用硬件浮点呢?使 用 arm-linux-gnueabihf-readelf 查看一下编译出来的 icm20608App 就知道了,输入如下命令:
arm-linux-gnueabihf-readelf -A icm20608App结果如图 62.6.1.1 所示:

从图 62.6.1.1 可以看出 FPU 架构为 VFPv3,SIMD 使用了 NEON,并且使用了 SP 和 DP, 说明 icm20608App 这个应用程序使用了硬件浮点。
6:运行测试
将上一小节编译出来 icm20608.ko 和 icm20608App 这 两 个 文 件 拷 贝 到 rootfs/lib/modules/4.1.15 目录中,重启开发板,进入到目录 lib/modules/4.1.15 中。输入如下命令 加载 icm20608.ko 这个驱动模块。
depmod //第一次加载驱动的时候需要运行此命令
modprobe icm20608.ko //加载驱动模块当驱动模块加载成功以后使用 icm20608App 来测试,输入如下命令:
./icm20608App /dev/icm20608
可以看出,开发板静止状态下,Z 轴方向的加速度在 1g 左右,这个就是重力加速度。对于 陀螺仪来讲,静止状态下三轴的角速度应该在 0°/S 左右。ICM20608 内温度传感器采集到的温 度在 30 多度左右,大家可以晃动一下开发板,这个时候陀螺仪和加速度计的值就会有变化。
本文仅在记录学习正点原子imx6ull-mini开发板的过程,不做他用。
相关文章:
正点原子imx6ull-mini-Linux驱动之Linux SPI 驱动实验(22)
跟上一章一样,其实这些设备驱动,无非就是传感器对应寄存器的读写。而这个读写是建立在各种通信协议上的,比如上一章的i2c,我们做了什么呢,就是把设备注册成一个i2c平台驱动,这个i2c驱动怎么搞的呢ÿ…...

TypeScript 函数
函数是JavaScript应用程序的基础。 它帮助你实现抽象层,模拟类,信息隐藏和模块。 在TypeScript里,虽然已经支持类,命名空间和模块,但函数仍然是主要的定义 行为 的地方。 TypeScript为JavaScript函数添加了额外的功能&…...

C++ : namespace,输入与输出,函数重载,缺省参数
一,命名空间(namespace) 1.1命名空间的作用与定义 我们在学习c的过程中,经常会碰到命名冲突的情况。就拿我们在c语言中的一个string函数来说吧: int strncat 0; int main() {printf("%d", strncat);return 0; } 当我们运行之后&…...

目标检测 | yolov1 原理和介绍
1. 简介 论文链接:https://arxiv.org/abs/1506.02640 时间:2015年 作者:Joseph Redmon 代码参考:https://github.com/abeardear/pytorch-YOLO-v1 yolo属于one-stage算法,仅仅使用一个CNN网络直接预测不同目标的类别与…...

excel中有些以文本格式存储的数值如何批量转换为数字
一、背景 1.1 文本格式存储的数值特点 在平时工作中有时候会从别地方导出来表格,表格中有些数值是以文本格式存储的(特点:单元格的左上角有个绿色的小标)。 1.2 文本格式存储的数值在排序时不符合预期 当我们需要进行排序的时候…...

原神升级计划数据表:4个倒计时可以修改提示信息和时间,可以点击等级、命座、天赋、备注进行修改。
<!DOCTYPE html> <html lang"zh-CN"><head><meta charset"UTF-8"><title>原神倒计时</title><style>* {margin: 0;padding: 0;box-sizing: border-box;body {background: #0b1b2c;}}header {width: 100vw;heigh…...

YoloV10 论文翻译(Real-Time End-to-End Object Detection)
摘要 近年来,YOLO因其在计算成本与检测性能之间实现了有效平衡,已成为实时目标检测领域的主流范式。研究人员对YOLO的架构设计、优化目标、数据增强策略等方面进行了探索,并取得了显著进展。然而,YOLO对非极大值抑制࿰…...

第R1周:RNN-心脏病预测
本文为🔗365天深度学习训练营 中的学习记录博客 原作者:K同学啊 要求: 1.本地读取并加载数据。 2.了解循环神经网络(RNN)的构建过程 3.测试集accuracy到达87% 拔高: 1.测试集accuracy到达89% 我的环境&a…...

Golang | Leetcode Golang题解之第321题拼接最大数
题目: 题解: func maxSubsequence(a []int, k int) (s []int) {for i, v : range a {for len(s) > 0 && len(s)len(a)-1-i > k && v > s[len(s)-1] {s s[:len(s)-1]}if len(s) < k {s append(s, v)}}return }func lexico…...

远程连接本地虚拟机失败问题汇总
前言 因为我的 Ubuntu 虚拟机是新装的,并且应该装的是比较纯净的版本(纯净是指很多工具都尚未安装),然后在使用远程连接工具 XShell 连接时出现了很多问题,这些都是我之前没遇到过的(因为之前主要使用云服…...
WebRTC 初探
前言 项目中有局域网投屏与文件传输的需求,所以研究了一下 webRTC,这里记录一下学习过程。 WebRTC 基本流程以及概念 下面以 1 对 1 音视频实时通话案例介绍 WebRTC 的基本流程以及概念 WebRTC 中的角色 WebRTC 终端,负责音视频采集、编解码、NAT 穿…...

Python:read,readline和readlines的区别
在Python中,read(), readline(), 和 readlines() 是文件操作中常用的三个方法,它们都用于从文件中读取数据,但各自的使用方式和适用场景有所不同。 read() 方法: read(size-1) 方法用于从文件中读取指定数量的字符。如果指定了si…...

重生之我学编程
编程小白如何成为大神?大学新生的最佳入门攻略 编程已成为当代大学生的必备技能,但面对众多编程语言和学习资源,新生们常常感到迷茫。如何选择适合自己的编程语言?如何制定有效的学习计划?如何避免常见的学习陷阱&…...
如何将PostgreSQL的数据实时迁移到SelectDB?
PostgreSQL 作为一个开源且功能强大的关系型数据库管理系统,在 OLTP 系统中得到了广泛应用。很多企业利用其卓越的性能和灵活的架构,应对高并发事务、快速响应等需求。 然而对于 OLAP 场景,PostgreSQL 可能并不是最佳选择。 为了实现庞大规…...

关于c语言的const 指针
const * type A 指向的数据是常量 如上所示,运行结果如下,通过解引用的方式,改变了data的值 const type * A 位置是常量,不能修改 运行结果如下 type const * A 指针是个常量,指向的值可以改变 如上所示,…...

万能门店小程序开发平台功能源码系统 带完整的安装代码包以及安装搭建教程
互联网技术的迅猛发展和用户对于便捷性需求的不断提高,小程序以其轻量、快捷、无需安装的特点,成为了众多商家和开发者关注的焦点。为满足广大商家对于门店线上化、智能化管理的需求,小编给大家分享一款“万能门店小程序开发平台功能源码系统…...
C#初级——字典Dictionary
字典 字典是C#中的一种集合,它存储键值对,并且每个键与一个值相关联。 创建字典 Dictionary<键的类型, 值的类型> 字典名字 new Dictionary<键的类型, 值的类型>(); Dictionary<int, string> dicStudent new Dictionary<int, str…...

git版本控制的底层实现
目录 前言 核心概念串讲 底层存储形式探测 本地仓库的详细解析 提交与分支的深入解析 几个问题的深入探讨 前言 Git的重要性 Git是一个开源的版本控制工具,广泛用于编程开发领域。它极大地提高了研发团队的开发协作效率。对于开发者来说,Git是一个…...

深入解析数据处理的技术与实践
欢迎来到我的博客,很高兴能够在这里和您见面!欢迎订阅相关专栏: 工💗重💗hao💗:野老杂谈 ⭐️ 全网最全IT互联网公司面试宝典:收集整理全网各大IT互联网公司技术、项目、HR面试真题. ⭐️ AIGC时代的创新与未来:详细讲解AIGC的概念、核心技术、应用领域等内容。 ⭐…...

python-调用c#代码
环境: win10,net framework 4,python3.9 镜像: C#-使用IronPython调用python代码_ironpython wpf-CSDN博客 https://blog.csdn.net/pxy7896/article/details/119929434 目录 hello word不接收参数接收参数 其他例子 hello word 不…...

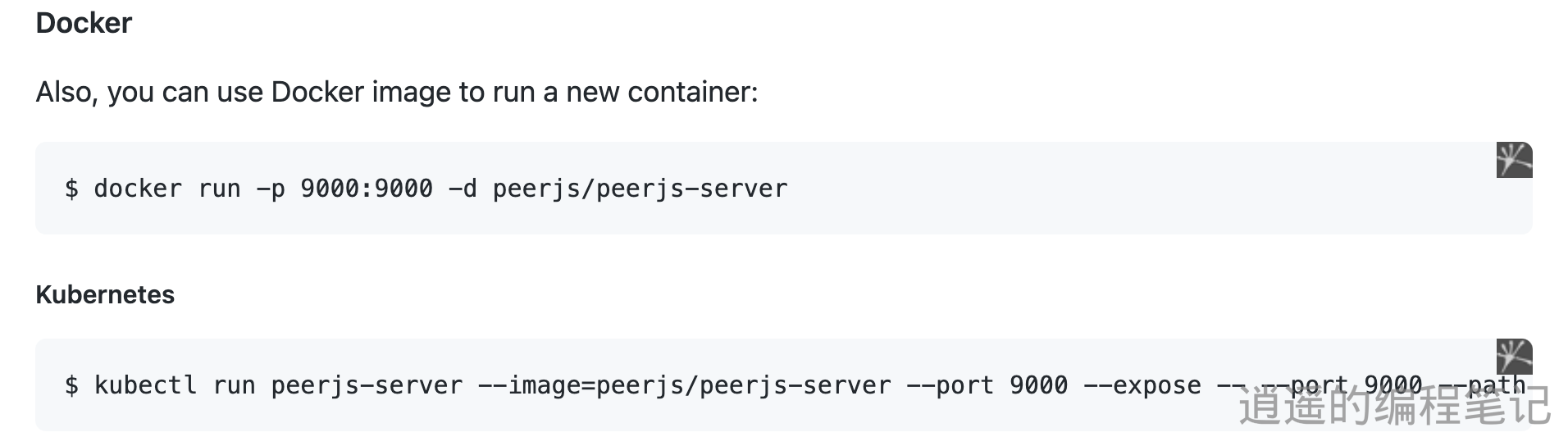
告别命令行!用Python脚本批量管理Docker容器,效率提升不止一点点
告别命令行!用Python脚本批量管理Docker容器,效率提升不止一点点每次在终端敲入docker ps、docker stop、docker rm时,你是否想过——当容器数量超过两位数,这种重复劳动是否在消耗你的生命?去年我们团队在迁移微服务架…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程
更多请点击: https://intelliparadigm.com 第一章:Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程 Lindy自动化平台以“越久越可靠”为设计哲学,将经典软件工程原则与现代可观测性实践深度融合。其核心优势…...

终极免费方案:WandEnhancer完整解锁WeMod Pro功能快速指南
终极免费方案:WandEnhancer完整解锁WeMod Pro功能快速指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否渴望享受WeMod Pro会员的所…...

自制极低频电流探头:负电阻补偿原理与低频方波测量实践
1. 项目概述:为极低频电流测量而生在电子测试领域,电流探头是个再常见不过的工具,无论是排查开关电源的纹波,还是分析电机驱动的波形,都离不开它。但如果你尝试用市面上常见的电流探头去观察一个频率低至几赫兹&#x…...

XML 服务器
XML 服务器 引言 XML(可扩展标记语言)服务器在现代互联网技术中扮演着至关重要的角色。它为数据的传输和处理提供了灵活且高效的方式。本文将深入探讨XML服务器的概念、工作原理、应用场景及其在软件开发中的重要性。 什么是XML服务器? XML服务器是一种用于存储、处理和…...

高精度光照检测
光线检测仪,kotlin开发,调用手机感光模块检测室内外光照强度,用途多多,我主要用途孩子写作业检测光照保护视力。 食用方法∶打开即测,速度快,无广告,手机平视即可,无须直视光线。 买…...

OpenIPC开源固件:5分钟解锁网络摄像头的终极控制权
OpenIPC开源固件:5分钟解锁网络摄像头的终极控制权 【免费下载链接】firmware Alternative IP Camera firmware from an open community 项目地址: https://gitcode.com/gh_mirrors/fir/firmware 还在为网络摄像头的封闭系统而烦恼吗?想要完全掌控…...

机器学习在射电天文数据分类中的应用:以MIGHTEE巡天SFG/AGN分类为例
1. 项目概述:当机器学习遇见深空射电巡天在射电天文学领域,我们正经历一场数据洪流。以MeerKAT望远镜阵列主导的MIGHTEE巡天项目为例,其在COSMOS天区的一次早期科学数据释放,就在不到1平方度的天区内探测到了超过6000个射电源。传…...

taotoken用量看板如何帮助团队精细化管理api调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken用量看板如何帮助团队精细化管理api调用成本 对于团队管理者而言,将大模型能力集成到产品开发或业务流程中&am…...