I2C模块理解
I2C模块理解
文章目录
- I2C模块理解
- 1.配置I2C
- 2.信号
- 3.数据传输
- 3.1主机发送
- 3.2主机接收
- 3.3从机发送
- 3.4从机接收
- 4.中断传输
- 5.Aardvark
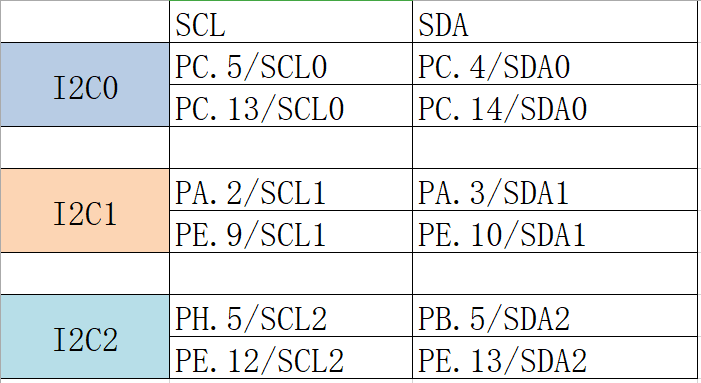
1.配置I2C
I2C的特征
- 只需要两条公共总线(线)即可控制I2C网络上的任何设备
- 无需像UART通信那样事先约定数据传输速率。因此可以根据需要随时调整数据传输速度
- 用于验证传输数据的简单机制
- 使用7位寻址系统来定位I2C总线上的特定设备
- I2C网络易于扩展,新设备可以简单地连接到两条公共I2C总线上
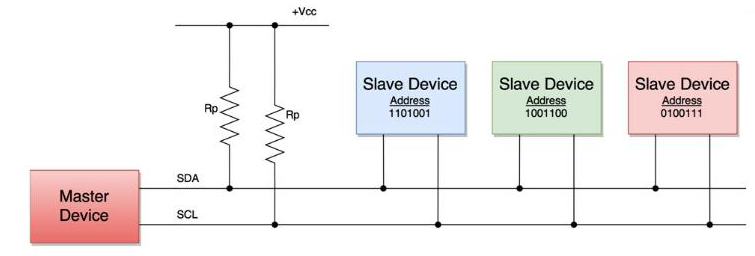
I2C优缺点
1.由于只需要两根电线,I2C 非常适合有许多设备连接在总线上的电路板。这有助于降低成本和电路的复杂性作为额外的设备添加到系统。
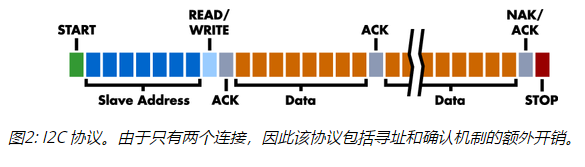
2.由于只有两条连接,因此处理寻址和确认的开销会更加复杂。这在简单的配置中可能效率低下,可能首选 SPI 这样的直接链接接口。
2.信号
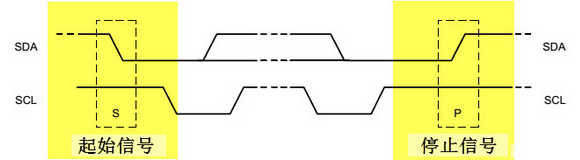
1.起始信号
I2C协议规定,SCL处于高电平时,SDA由高到低变化,这种信号是起始信号。
2.停止信号
I2C协议规定,SCL处于高电平,SDA由低到高变化,这种信号是停止信号。
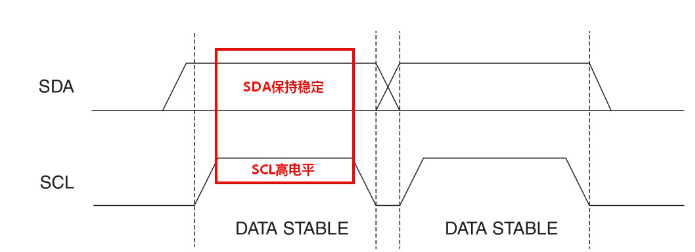
3.数据有效性
I2C协议对数据的采样发生在SCL高电平期间,除了起始和停止信号,在数据传输期间,SCL为高电平时,SDA必须保持稳定,不允许改变,在SCL低电平时才可以进行变化。
4.应答信号与非应答信号
应答信号出现在1个字节传输完成之后,即第9个SCL时钟周期内,此时主机需要释放SDA总线,把总线控制权交给从机
如果总线之前为高电平,从机控制总线从高电平到低电平,则为应答信号
如果总线之前为高电平,从机控制总线持续高电平,则为非应答信号
3.数据传输
| 传输模式 | SDA | SCL | 备注 |
|---|---|---|---|
| 主机发送模式 | 输出 | 输出 | 主机发送一系列数据到从机。一个开始条件(S),随后一个从机地址,(SLA)+写控制字(W),表示进入主机发送模式。 |
| 主机接收模式 | 输入 | 输出 | 主机接收模式中,主机从从机接收一系列数据。一个开始条件(S),随后一个从机地址,(SLA)+读控制字®表示进入主机接收模式。 |
| 从机接收模式 | 输入 | 输入 | 从机接收模式中,从机从主机接收一系列数据,进入从机模式前,需设置从机地址 |
| 从机发送模式 | 输出 | 输入 | 从机发送模式中,从机发送一系列数据到主机。进入从机模式前,需设置从机地址 |
I2C 数据传输是以8-bit 进行双向数据传输,标准模式下可达100kbit/s 的传输速率,快速模式可达400kbit/s 的传输速率。
I2C 协议的一个示例。
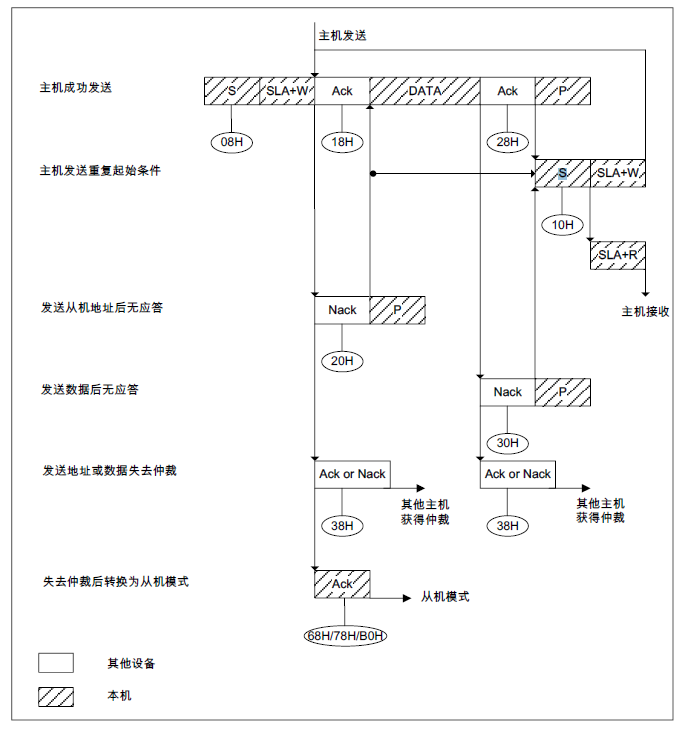
3.1主机发送
示意图:
void HT_I2C_Master_Transmit(HT_I2C_TypeDef *I2Cx, uint8_t DevAddress, uint8_t *pData, uint16_t Size)
{// 1.查询I2C 控制寄存器中的开始标志位, 如果空闲则生成开始信号, 否则不会生成开始信号HT_I2C_start(I2Cx); // 2.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while(HT_I2C_ITFlagStatusGet(I2Cx)==RESET){;} if(I2Cx == HT_I2C0){// 3.查询I2C 状态寄存器中是否未启动标志 08H -> 起始条件已被发送if(HT_I2C0->I2CSTA == I2C_START){// 4.写入I2C 数据寄存器 从机地址HT_I2C0->I2CDAT = I2C_ADD_WRITE (DevAddress);// 5.清空I2C 控制寄存器中的中断标志位HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/ }else return;// 6.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while(HT_I2C_ITFlagStatusGet(I2Cx)==RESET){;} // 7.查询I2C 状态寄存器是否回复ACK 0X18H为 SLA+W 已被发送 ACK 已被接收if(HT_I2C0->I2CSTA!= I2C_MASTER_TRANS_ADDR_ACK) {return;}else{while (Size > 0) /* send data to slave */{// 8.写入I2C 数据寄存器的值 遍历pData数组HT_I2C0->I2CDAT = *(pData++); // 9.清空I2C 控制寄存器中的中断标志位 HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/ // 10.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while (HT_I2C_ITFlagStatusGet (I2Cx)== RESET) {;} // 11.查询I2C 状态寄存器是否回复ACK 0X28H为 数据字节已被发送, ACK 已被接收if (HT_I2C0->I2CSTA != I2C_MASTER_TRANS_DATA_ACK) {return;}}}// 12.清空I2C 控制寄存器中的停止标志位 1:当处于主机模式,则向总线传输停止信号 0:不向总线传输停止信号 当前为主机模式HT_I2C0->I2CCON |= I2C_I2CCON_STO;// 13.清空I2C 控制寄存器中的中断标志位HT_I2C0->I2CCON&= ~I2C_I2CCON_SI;
}
3.2主机接收
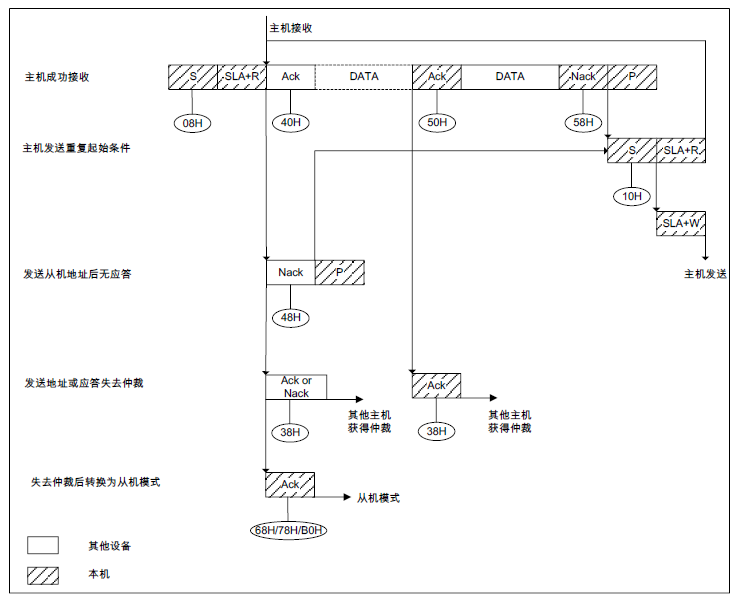
void HT_I2C_Master_Receive (HT_I2C_TypeDef *I2Cx,uint8_t DevAddress, uint8_t *pData, uint16_t Size)
{// 1.查询I2C 控制寄存器中的开始标志位, 如果空闲则生成开始信号, 否则不会生成开始信号HT_I2C_Start (I2Cx); /*Generate start condition*/ // 2.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while (HT_I2C_ITFlagStatusGet (I2Cx)== RESET) {;} if (I2Cx == HT_I2C0){// 3.查询I2C 状态寄存器中是否未启动标志 08H -> 起始条件已被发送if (HT_I2C0->I2CSTA== I2C_START) /*start condition transmitted*/ {// 4.读取I2C 数据寄存器 从机地址HT_I2C0->I2CDAT = I2C_ADD_READ (DevAddress); /* Send Slave address */ // 5.清空I2C 控制寄存器中的中断标志位HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/ }else return;// 6.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while (HT_I2C_ITFlagStatusGet (I2Cx)== RESET) {;} // 7.查询I2C 状态寄存器是否 40H SLA+R 已被发送; ACK 已被接收 if (HT_I2C0->I2CSTA!= I2C_MASTER_RCV_ADDR_ACK) {return;}else{while (Size >0){// 8.将获取到的数据放入数组pData中*(pData++) = HT_I2C0->I2CDAT ; /* 获取数据*/ // 9.清空I2C 控制寄存器中的中断标志位HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/ // 10.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while (HT_I2C_ITFlagStatusGet (I2Cx)== RESET) {;} // 11. 50H 数据字节已被接收;已返回ACKif (HT_I2C0->I2CSTA != I2C_MASTER_RCV_DATA_ACK) {return;}}}HT_I2C0->I2CCON |= I2C_I2CCON_STO; /*Generate STOP condition*/HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/}3.3从机发送
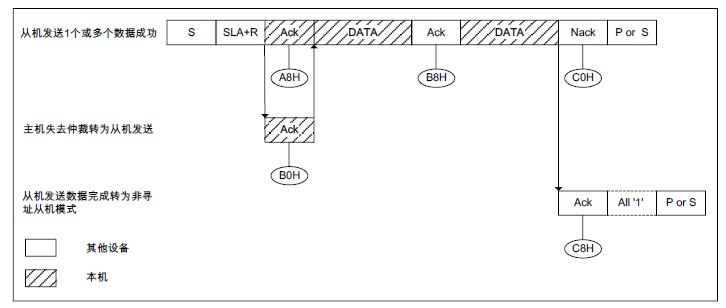
void HT_I2C_Slave_Transmit(HT_I2C_TypeDef *I2Cx,uint8_t *pData, uint16_t Size)
{if (I2Cx==HT_I2C0){// 1.查询I2C 控制寄存器中的中断标志位,清除中断标志HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/ // 2.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while(HT_I2C_ITFlagStatusGet(I2Cx)==RESET){;} // 3.A8H 自身SLA+R 已被接收;已返回ACKif(HT_I2C0->I2CSTA == I2C_SLAVE_TRANS_ADDR_ACK) {// 4.发送数据到接收器while(Size >0) /* send data to slave */ {// 5.写入I2C 数据寄存器的值 遍历pData数组HT_I2C0->I2CDAT = *(pData++); // 6.查询I2C 控制寄存器中的中断标志位,清除中断标志 HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; // 7.查询I2C 控制寄存器中的中断标志位,判断是否置位成功 while(HT_I2C_ITFlagStatusGet(I2Cx)==RESET){;} // 8.B8H 数据字节已被发送;ACK 已被接收 if (HT_I2C0->I2CSTA != I2C_SLAVE_TRANS_DATA_ACK) {return;}}}else return;}
}3.4从机接收
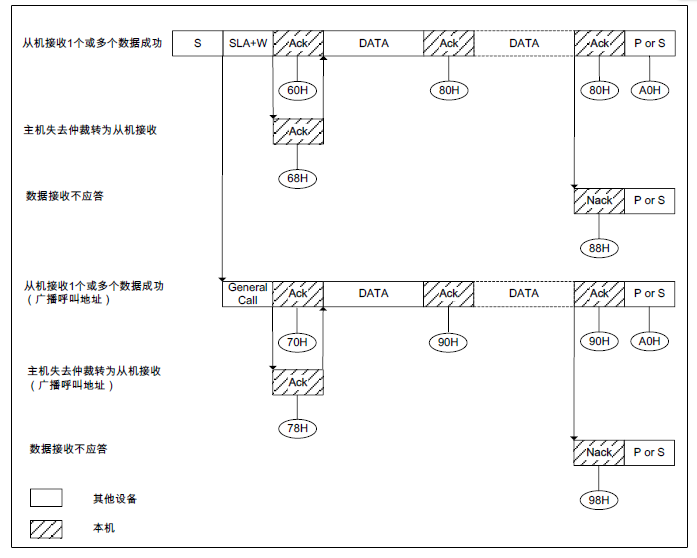
void HT_I2C_Slave_Receive(HT_I2C_TypeDef *I2Cx,uint8_t *pData, uintl6_t Size)
{if (I2Cx== HT_I2C0){// 1.查询I2C 控制寄存器中的中断标志位,清除中断标志HT_I2C0->I2CCON &= ~I2C_I2CCON_SI; /* Clear the SI bit*/// 2.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while(HT_I2C_ITFlagStatusGet(I2Cx)==RESET){;}// 3.60H 自身的SLA+W 已被接收;已返回ACKif(HT_I2C0->I2CSTA == I2C_SLAVE_RCV_ADDR_ACK){// 4.发送数据到接收器while(Size >0) /* send data to slave */{// 5.写入I2C 数据寄存器的值 遍历pData数组*(pData++) = HT_I2C0->I2CDAT;// 6.查询I2C 控制寄存器中的中断标志位,清除中断标志HT_I2C0->I2CCON &= ~I2C_I2CCON_SI;// 7.查询I2C 控制寄存器中的中断标志位,判断是否置位成功while(HT_I2C_ITFlagStatusGet(I2Cx)==RESET){;}// 8.80H 自身SLV 地址已被寻址;DATA 字节已被接收; 已返回ACKif (HT_I2C0->I2CSTA != I2C_SLAVE_RCV_DATA_ACK){return;}}}else return;}}
4.中断传输
对I2C总线来说工作在中断和非中断模式在时序上是相同的,只不过在非中断模式下是通过检测ACK信号来判断从设备响应了,在中断模式下是通过中断信号来判断从设备响应了,一般是读主CPU侧的I2C控制器的中断标志来判断的。
5.Aardvark
1.aardvark适配器为发送器接口函数
# 1.设置比特率
Set Bitrate (aa_i2c_bitrate)
# 2.从 I2C 从设备读取字节流。
Master Read (aa_i2c_read)
# 3.从具有扩展状态信息的 I2C 从设备读取字节流
Master Read Extended (aa_i2c_read_ext)
# 4.向 I2C 从设备写入字节流。
Master Write (aa_i2c_write)
# 5.向具有扩展状态信息的 I2C 从设备写入字节流。
Master Write Extended (aa_i2c_write_ext)
# 6.向 I2C 从设备写入一个字节流,然后从同一个从设备读取。
Master Write-Read (aa_i2c_write_read)
2.aardvark适配器为接收器接口函数
# 1.启用 Aardvark 适配器作为 I2C 从设备。
Slave Enable (aa_i2c_slave_enable)
# 2.禁用 Aardvark 适配器作为 I2C 从设备。
Slave Disable (aa_i2c_slave_disable)
# 3.在 Aardvark 适配器进入从模式并由主服务器联系的情况下设置从服务器响应。
Slave Set Response (aa_i2c_slave_set_response)
# 4.返回从以前的 Aardvark I2C 从节写入到 I2C 主传输的字节数。
Slave Write Statistics (aa_i2c_slave_write_stats)
# 5.返回从以前的 Aardvark I2C 从服务器写入到具有扩展状态信息的 I2C 主传输的字节数。
Slave Write Statistics Extended (aa_i2c_slave_write_stats_ext)
# 6.从 I2C 从接收机读取字节。
Slave Read (aa_i2c_slave_read)
# 7.从具有扩展状态信息的 I2C 从接收机读取字节。
Slave Read Extended (aa_i2c_slave_read_ext)
3.使用方式
# 1.打开Aardvark端口
handle = aa_open(port)
if handle <= 0:print("Unable to open Aardvark device on port %d" % port)print("Error code = %d" % handle)sys.exit()# 2.激活/关闭各个子系统(I2C,SPI,GPIO)
aa_configure(handle, AA_CONFIG_SPI_I2C) # 3.启动/关闭 SCL 和 SDA 上的 I2C 上拉电阻器
aa_i2c_pullup(handle, AA_I2C_PULLUP_BOTH) # Power the EEPROM using the Aardvark adapter's power supply.
# 4.激活/关闭目标电源插脚4和6
aa_target_power(handle, AA_TARGET_POWER_BOTH) # 5.将 I2C 比特率设置为kHz
bitrate = aa_i2c_bitrate(handle, bitrate)
print("Bitrate set to %d kHz" % bitrate)# Set the bus lock timeout
# 6.以毫秒为单位设置 I2C 总线锁定超时
bus_timeout = aa_i2c_bus_timeout(handle, BUS_TIMEOUT)
print("Bus lock timeout set to %d ms" % bus_timeout)# Perform the operation
if command == "write":_writeMemory(handle, device, addr, length, 0) # 7.向 I2C 从设备写入字节流 地址、字节长度、FLAG、指向数据的指针print("Wrote to EEPROM")elif command == "read":_readMemory(handle, device, addr, length) # 8.从 I2C 从设备读取字节流 地址、字节长度、FLAG、指向数据的指针
信号线:
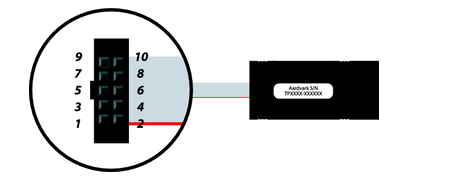
- SCL
- GND
- SDA
- NC/+5V
- MISO
- NC/+5V
- SCLK
- MOSI
- SS
- GND
疑问:
1.为什么每次执行程序之前都要清楚中断标志?
参考文档:
(43条消息) IIC中断和非中断模式_i2c 中断模式_退5不落5的博客-CSDN博客
(43条消息) 轮询和中断的区别,中断上下文_小翅小排的博客-CSDN博客
https://www.totalphase.com/support/articles/200468316#s5.5
https://pyaardvark.readthedocs.io/en/latest/intro.html#on-pyaardvark-datatypes
I2C通信基础知识:硬件、数据传输、配置 (enroo.com)
(51条消息) STM32F767+STM32CubeMX I2C通信读写EEPROM数据(采用轮询、DMA、中断三种方式)_stm32cubemx配置iic总线读写eeprom代码_LI++的博客-CSDN博客
(61条消息) Arduino UNO向AT24C02写入数据IIC完整通讯过程详解_at24c02写数据流程图_perseverance52的博客-CSDN博客
(61条消息) I2C通信协议详解-CSDN博客
相关文章:
I2C模块理解
I2C模块理解 文章目录I2C模块理解1.配置I2C2.信号3.数据传输3.1主机发送3.2主机接收3.3从机发送3.4从机接收4.中断传输5.Aardvark1.配置I2C I2C的特征 只需要两条公共总线(线)即可控制I2C网络上的任何设备无需像UART通信那样事先约定数据传输速率。因此…...
手把手教你使用--常用模块--HC05蓝牙模块,无线蓝牙串口透传模块,(实例:手机蓝牙控制STM32单片机点亮LED灯)
最近在学STM32,基本的学完了,想学几个模块来巩固一下知识,就想到了蓝牙模块。玩啥好难过有很多博客教怎么连的,但自己看起来还是有点糊涂。模块的原理和知识点我就不讲解了,这里我主要手把手记录一下我是如何对蓝牙模块…...

MyBatis高频面试题
目录 1、Mybatis中#和$的区别 2、Mybatis的编程步骤是什么样的 3...
Redis基础篇
redis的三大特点: 支持多数据类型,支持持久化,单线程 多路IO复用 对键操作的命令: keys * 查看当前库所有key exists key 判断key是否存在 del key 删除 unlink key 非阻塞删除,异步删除 expire key …...

unity的C#学习——静态常量和动态常量的定义与使用
定义常量 在C#中,常量是一种不可改变的量,一旦被定义,其值就不能被修改。C#中有两种类型的常量,静态常量和动态常量。 1、静态常量的定义 静态常量是在编译时就已经确定其值的常量,使用const关键字定义。由于在编译…...
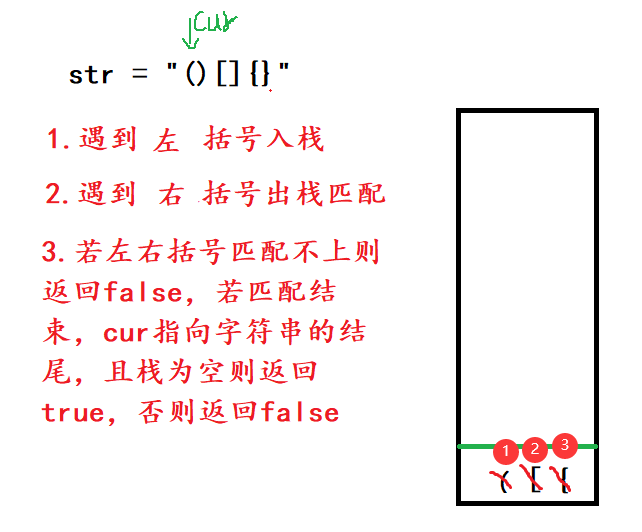
栈----数据结构
栈🔆栈的概念🔆栈的结构🔆栈的实现🔆括号匹配问题🔆结语🔆栈的概念 栈:一种特殊的线性表,其只允许在固定的一端进行插入和删除元素操作。**进行数据插入和删除操作的一端称为栈顶&am…...
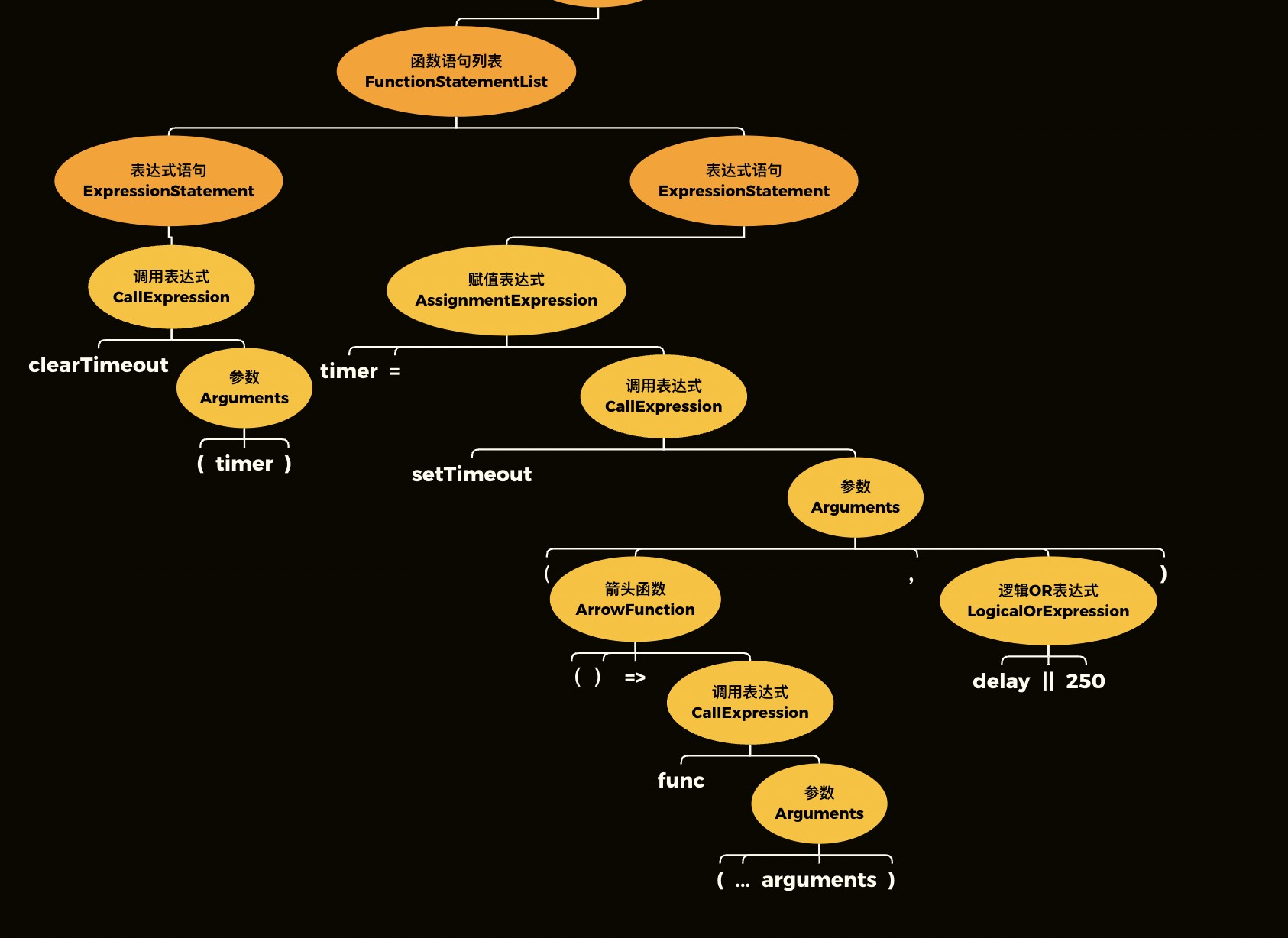
【人人都能读标准】11. 原理篇总结:一个程序的完整执行过程
本文为《人人都能读标准》—— ECMAScript篇的第11篇。我在这个仓库中系统地介绍了标准的阅读规则以及使用方式,并深入剖析了标准对JavaScript核心原理的描述。 我们一路走了很远很远,终于到了本书原理篇的最后一站。 在原理篇中,我们先讲了…...
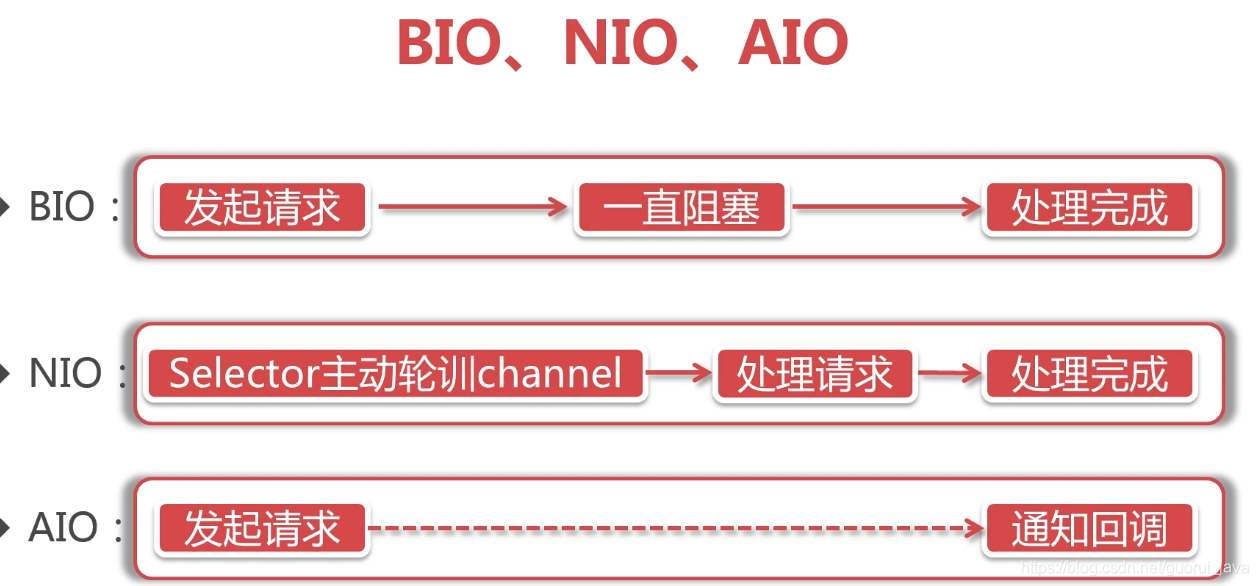
sheng的学习笔记-IO多路复用,NIO,BIO,AIO
基础概念IO分为几种:同步阻塞的BIO,同步非阻塞的NIO,异步非阻塞AIO,IO多路复用,信号驱动IO(不常用)对于一个network IO,它会涉及到两个系统对象,一个是调用这个IO的proce…...
【Python入门第三十五天】Python丨文件打开
在服务器上打开文件 假设我们有以下文件,位于与 Python 相同的文件夹中。 demofile.txt Hello! Welcome to demofile.txt This file is for testing purposes. Good Luck!如需打开文件,请使用内建的 open() 函数。 open() 函数返回文件对象ÿ…...
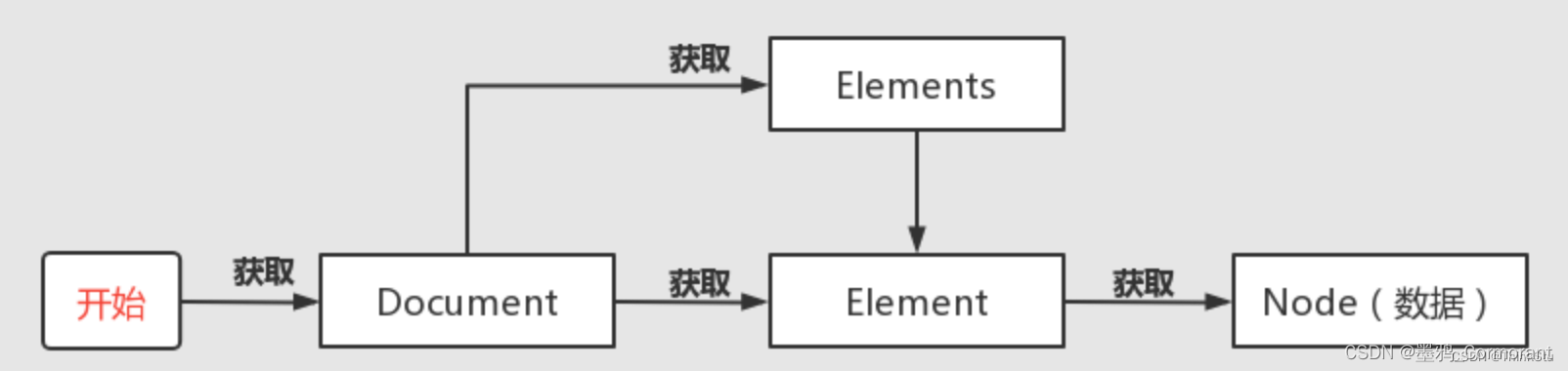
jsoup 框架的使用指南
概述 参考: 官方文档jsoup的使用JSoup教程jsoup 在 GitHub 的开源代码 概念简介 jsoup 是一款基于 Java 的 HTML 解析器,它提供了一套非常省力的 API,不但能直接解析某个 URL 地址、HTML 文本内容,而且还能通过类似于 DOM、CS…...

web前端开发和后端开发哪个难度大?
前言 因为涉及到的具体的应用的领域不同,所以说不能简单地说哪一个难,对于前端而言你会感觉到入门会非常的简单,这也是会给许多人一种错觉,前端很简单,但是只能说是在入门理解上是有利于新手的,前端在主要…...

认证与认可之间有什么区别和联系?
认证与认可之间有什么区别和联系? 当今社会,认证与认可已经深入企业的生活,那么认证与认可之间到底有什么区别和联系呢? 认证,是指由认证机构证明产品、服务、管理体系符合相关技术规范、相关技术规范的强制性要求或者…...
【Java|golang】1626. 无矛盾的最佳球队---最长子序列,不连续,二维数组排序
假设你是球队的经理。对于即将到来的锦标赛,你想组合一支总体得分最高的球队。球队的得分是球队中所有球员的分数 总和 。 然而,球队中的矛盾会限制球员的发挥,所以必须选出一支 没有矛盾 的球队。如果一名年龄较小球员的分数 严格大于 一名…...
)
C++ 八股文(简单面试题)
1.左值 可寻址变量,持久性; 2.右值 没有变量名,不可寻址,短暂性; 3.指针 指向的内存地址,指针变量存储的就是指向的对象的首地址 4.引用 为一个变量起别名,定义引用的时候一定要初始化&a…...

RK3588平台开发系列讲解(显示篇)DP显示调试方法
平台内核版本安卓版本RK3588Linux 5.10Android 12文章目录 一、查看 connector 状态二、强制使能/禁⽤ DP三、DPCP 读写四、Type-C 接口 Debug五、查看 DP 寄存器六、查看 VOP 状态七、查看当前显示时钟八、调整 DRM log 等级沉淀、分享、成长,让自己和他人都能有所收获!😄…...

模拟请求发生跨域问题
参考:传送门 问题产生: Access to XMLHttpRequest at ‘http://test-cms.jinhuahuolong.com/api/pages/list’ from origin ‘null’ has been blocked by CORS policy: No ‘Access-Control-Allow-Origin’ header is present on the requested resourc…...
Qt实践项目:仿Everything软件实现一个QtEverything
⭐️我叫忆_恒心,一名喜欢书写博客的在读研究生👨🎓。 如果觉得本文能帮到您,麻烦点个赞👍呗! 近期会不断在专栏里进行更新讲解博客~~~ 有什么问题的小伙伴 欢迎留言提问欧,喜欢的小伙伴给个三…...

WEB网站服务(一)
1.1 Apache网站服务基础1.1.1Apache简介Apache HTTP Server是开源软件项目的杰出代表,基于标准的HTTP网络协议提供网页浏览服务。Apache服务器可以运行在Linux,UNIX,windows等多种操作系统平台中。1.Apache的起源1995年,Apache服务程序的1.0版…...
)
Python数据分析script必备知识(一)
Python数据分析script必备知识(一) 1.重定向终端输出内容 使生成的结果移动到其他位置 # 重定向, 使生成的结果移动到其他位置 import syssys.stderr = sys.stdoutprint(dir(sys)) # ,,,,,__stderr__, __stdin__, __stdout__,,,,,,# 使用场景:脚本上线时,想要把输出结果…...

初识linux之管道
一、进程间通信的概念大家都知道,进程是具有独立性的,因为一个程序运行起来生成进程时,也会生成它的进程结构体,即PCB,然后然后通过进程结构体中的结构体指针找到它的虚拟地址空间,然后再通过它的页表映射到…...

PyTorch 2.8镜像一文详解:xFormers+Accelerate+Diffusers全栈预装环境实测
PyTorch 2.8镜像一文详解:xFormersAccelerateDiffusers全栈预装环境实测 1. 镜像概述与核心优势 PyTorch 2.8深度学习镜像是一个经过深度优化的全栈AI开发环境,专为现代深度学习任务设计。这个镜像最显著的特点是开箱即用的完整工具链支持,…...

Java程序员如何入门音视频开发
对于Java程序员来说,他们缺乏参与音频和视频项目的经验。如何快速开始?你需要立即学习C吗?答案是否定的。 成功的关键在于循序渐进,从扎实的理论基础入手。第一步是学习多媒体基础理论。一本名为“多媒体基础概论”的教科书&#…...

基于滑模变结构观测器的永磁同步电机失磁故障容错补偿控制
基于失磁故障容错补偿的永磁同步电机控制【提供参考资料】 一、算法简介 基于滑模变结构观测器,将状态电流观测值作为反馈量,利用滑模变结构等值控制原理,建立实时估计永磁磁链算式,从而进行补偿。 避免因失磁导致的转速下降&…...

2026年,市面上正规SSL证书品牌众多,哪家才是真正专业之选?
在当今数字化时代,网络安全至关重要,SSL证书作为保障网站安全的关键工具,其重要性不言而喻。2026年,市面上正规的SSL证书品牌众多,企业在选择时往往会感到困惑。本文将为大家分析如何选择专业的SSL证书品牌,…...

百川2-13B-4bits模型调优:OpenClaw任务响应速度提升50%的3个技巧
百川2-13B-4bits模型调优:OpenClaw任务响应速度提升50%的3个技巧 1. 问题背景与优化动机 去年冬天,当我第一次将百川2-13B-4bits模型接入OpenClaw时,发现一个奇怪现象:同样的自动化任务,在本地测试时响应飞快&#x…...

3个消息保护痛点解决方案:RevokeMsgPatcher本地消息留存技术全解析
3个消息保护痛点解决方案:RevokeMsgPatcher本地消息留存技术全解析 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https:…...

thermalmonitordDisabler:突破iOS性能枷锁的终极方案——彻底解决过热降频问题指南
thermalmonitordDisabler:突破iOS性能枷锁的终极方案——彻底解决过热降频问题指南 【免费下载链接】thermalmonitordDisabler A tool used to disable iOS daemons. 项目地址: https://gitcode.com/gh_mirrors/th/thermalmonitordDisabler 当你在直播过程中…...

高效图像浏览:解锁90+格式的轻量级解决方案
高效图像浏览:解锁90格式的轻量级解决方案 【免费下载链接】ImageGlass 🏞 A lightweight, versatile image viewer 项目地址: https://gitcode.com/gh_mirrors/im/ImageGlass 在数字时代,我们每天都要与各种图像格式打交道࿰…...

用Multisim 14.0和AD620/OP07,手把手教你搭建一个能用的简易心电放大电路
从零开始构建心电放大电路:Multisim 14.0与AD620/OP07实战指南 在生物医学信号处理领域,心电信号采集一直是极具挑战性的课题。想象一下,当医生将电极贴在你胸口时,那些微弱的电信号是如何被放大并转化为清晰波形图的?…...
Pixel Mind Decoder 安全加固指南:防止API滥用与敏感信息泄露
Pixel Mind Decoder 安全加固指南:防止API滥用与敏感信息泄露 1. 为什么API安全如此重要 当你把AI模型部署为公开API服务时,就像在互联网上开了一家24小时营业的商店。如果不做好安全防护,可能会遇到各种不速之客:恶意攻击者试图…...