ucos-ii 的任务调度原理和实现
1、ucos-ii 任务创建与任务调度
1.1、任务的创建
当你调用 OSTaskCreate( ) 进行任务的创建的时候,会初始化任务的堆栈、保存cpu的寄存器、创建任务的控制块(OS_TCB)等的操作;
if (OSTCBPrioTbl[prio] == (OS_TCB *)0) { /* Make sure task doesn't already exist at this priority */
OSTCBPrioTbl[prio] = OS_TCB_RESERVED;/* Reserve the priority to prevent others from doing ... *//* ... the same thing until task is created. */OS_EXIT_CRITICAL();
psp = OSTaskStkInit(task, p_arg, ptos, 0u); /* Initialize the task's stack */
err = OS_TCBInit(prio, psp, (OS_STK *)0, 0u, 0u, (void *)0, 0u);if (err == OS_ERR_NONE) {if (OSRunning == OS_TRUE) { /* Find highest priority task if multitasking has started */OS_Sched();}} else {OS_ENTER_CRITICAL();
OSTCBPrioTbl[prio] = (OS_TCB *)0;/* Make this priority available to others */OS_EXIT_CRITICAL();}return (err);}
注意:ucosii不支持两个及以上相同的任务优先级的任务,ucosiii支持时间片轮转。
ucosii 的任务控制块是任务中很重要,它记录了任务的信息,包括优先级、延时时间、状态等信息。控制块定义如下:
typedef struct os_tcb {OS_STK *OSTCBStkPtr; /* Pointer to current top of stack */#if OS_TASK_CREATE_EXT_EN > 0uvoid *OSTCBExtPtr; /* Pointer to user definable data for TCB extension */OS_STK *OSTCBStkBottom; /* Pointer to bottom of stack */INT32U OSTCBStkSize; /* Size of task stack (in number of stack elements) */INT16U OSTCBOpt; /* Task options as passed by OSTaskCreateExt() */INT16U OSTCBId; /* Task ID (0..65535) */
#endifstruct os_tcb *OSTCBNext; /* Pointer to next TCB in the TCB list */struct os_tcb *OSTCBPrev; /* Pointer to previous TCB in the TCB list */#if (OS_EVENT_EN)OS_EVENT *OSTCBEventPtr; /* Pointer to event control block */
#endif#if (OS_EVENT_EN) && (OS_EVENT_MULTI_EN > 0u)OS_EVENT **OSTCBEventMultiPtr; /* Pointer to multiple event control blocks */
#endif#if ((OS_Q_EN > 0u) && (OS_MAX_QS > 0u)) || (OS_MBOX_EN > 0u)void *OSTCBMsg; /* Message received from OSMboxPost() or OSQPost() */
#endif#if (OS_FLAG_EN > 0u) && (OS_MAX_FLAGS > 0u)
#if OS_TASK_DEL_EN > 0uOS_FLAG_NODE *OSTCBFlagNode; /* Pointer to event flag node */
#endifOS_FLAGS OSTCBFlagsRdy; /* Event flags that made task ready to run */
#endifINT32U OSTCBDly; /* Nbr ticks to delay task or, timeout waiting for event */INT8U OSTCBStat; /* Task status */INT8U OSTCBStatPend; /* Task PEND status */INT8U OSTCBPrio; /* Task priority (0 == highest) */INT8U OSTCBX; /* Bit position in group corresponding to task priority */INT8U OSTCBY; /* Index into ready table corresponding to task priority */OS_PRIO OSTCBBitX; /* Bit mask to access bit position in ready table */OS_PRIO OSTCBBitY; /* Bit mask to access bit position in ready group */#if OS_TASK_DEL_EN > 0uINT8U OSTCBDelReq; /* Indicates whether a task needs to delete itself */
#endif#if OS_TASK_PROFILE_EN > 0uINT32U OSTCBCtxSwCtr; /* Number of time the task was switched in */INT32U OSTCBCyclesTot; /* Total number of clock cycles the task has been running */INT32U OSTCBCyclesStart; /* Snapshot of cycle counter at start of task resumption */OS_STK *OSTCBStkBase; /* Pointer to the beginning of the task stack */INT32U OSTCBStkUsed; /* Number of bytes used from the stack */
#endif#if OS_TASK_NAME_EN > 0uINT8U *OSTCBTaskName;
#endif#if OS_TASK_REG_TBL_SIZE > 0uINT32U OSTCBRegTbl[OS_TASK_REG_TBL_SIZE];
#endif
} OS_TCB;
2、任务调度实现
2.1、将任务优先级进行分组
因为ucosii最大优先级数量为64个,所以可以分成8组,每组8个优先级。
当一个任务被创建成功之后,它的组号由优先级的高三位决定(bit5 bit4 bit3),它在组内的编号由优先级的低三位决定(bit2 bit1 bit0),如下:
#if OS_LOWEST_PRIO <= 63u /* Pre-compute X, Y */
ptcb->OSTCBY = (INT8U)(prio >> 3u); // 组
ptcb->OSTCBX = (INT8U)(prio & 0x07u); // 组内编号
#else
2.2、任务就绪表
ucosii对任务优先级的调度管理是通过查询任务就绪表进行的。任务就绪表里面保存着当前所有任务的就绪状态,如下:
OSRdyTbl[8]说明:
1)它是uint8的数据类型。它的长度是8,每一个元素代表一个组,
比如 OSRdyTbl[0]代表第0组, OSRdyTbl[1]代表第1组,OSRdyTbl[2]代表第2组……以此类推。2)每一个元素中的每一个位(bit)代表组内的任务的就绪状态(1为就绪,0为未就绪)。打个比方:
1)当优先级为12 的任务就绪时,那么对应的OSRdyTbl[1]的第4位bit,绝对等于1;
当整个系统中,当只有优先级为12的任务就绪,其他所有任务都没有就绪时,那么OSRdyTbl[1] 绝对等于0x10。2)当优先级为0和1的任务就绪时,那么对应的OSRdyTbl[0]的第0位bit以及第1位bit,都绝对等于1;
当整个系统中,当只有优先级为0和1的任务就绪,其他所有任务都没有就绪时,那么OSRdyTbl[0] 绝对等于0x03。
2.3、任务释放CPU使用权
当任务中调用 OSTimeDly( ) 时,会让任务进入休眠的状态,交出CPU的执行权给到其他就绪任务去执行,这个过程就发生了任务的切换。
简单而言就是会把任务就绪表 OSRdyTbl 中对应的任务优先级在组内的编号状态改变,从而使任务自身进入休眠状态。代码如下:
if (ticks > 0u) { /* 0 means no delay! */OS_ENTER_CRITICAL();
y = OSTCBCur->OSTCBY; /* Delay current task */
OSRdyTbl[y] &= (OS_PRIO)~OSTCBCur->OSTCBBitX;if (OSRdyTbl[y] == 0u) {
OSRdyGrp &= (OS_PRIO)~OSTCBCur->OSTCBBitY;}
OSTCBCur->OSTCBDly = ticks; /* Load ticks in TCB */OS_EXIT_CRITICAL();OS_Sched(); /* Find next task to run! */}在上面的代码中发现了一个东西:OSRdyGrp。这个有什么用呢?
OSRdyGrp:管理任务就绪组的OSRdyGrp是INT8U类型的,它每一个bit代表一个组,只要这个组内有任何一个任务就绪了,那对应的这个bit就会被设置为1,表示这个组内目前有就绪的任务。否者对应的位为0。
举个例子,如下:
1)系统中只有任务0就绪了,那么OSRdyGrp 便等于 0x01(二进制00000001)。
2)系统中有任务0和任务63都就绪了,那么OSRdyGrp 便等于 0x81(二进制10000001)。
2.4、任务实现调度切换操作
发生一次任务调度是通过 OS_Sched() 进行的。源码如下:
void OS_Sched (void)
{
#if OS_CRITICAL_METHOD == 3u /* Allocate storage for CPU status register */
OS_CPU_SR cpu_sr = 0u;
#endifOS_ENTER_CRITICAL();if (OSIntNesting == 0u) { /* Schedule only if all ISRs done and ... */if (OSLockNesting == 0u) { /* ... scheduler is not locked */OS_SchedNew();
OSTCBHighRdy = OSTCBPrioTbl[OSPrioHighRdy];if (OSPrioHighRdy != OSPrioCur) { /* No Ctx Sw if current task is highest rdy */
#if OS_TASK_PROFILE_EN > 0u
OSTCBHighRdy->OSTCBCtxSwCtr++; /* Inc. # of context switches to this task */
#endif
OSCtxSwCtr++; /* Increment context switch counter */OS_TASK_SW(); /* Perform a context switch */}}}OS_EXIT_CRITICAL();
}这里的过程如下:
(1)先通过 OS_SchedNew() 找到当前处于就绪状态的最高优先级的任务,如下:
y = OSUnMapTbl[OSRdyGrp];
OSPrioHighRdy = (INT8U)((y << 3u) + OSUnMapTbl[OSRdyTbl[y]]);
(2)然后通过 OS_TASK_SW() 进行任务切换,它的过程如下:
1)OS_TASK_SW 只是一个宏,它实际替换的是 OSCtxSw()
#define OS_TASK_SW() OSCtxSw()2)OSCtxSw()是由汇编实现的
OSCtxSw
PUSH {R4, R5}
LDR R4, =NVIC_INT_CTRL ;触发PendSV异常 (causes context switch)
LDR R5, =NVIC_PENDSVSET
STR R5, [R4]
POP {R4, R5}
BX LR就这样,上下文就完成了一次切换。

相关文章:
ucos-ii 的任务调度原理和实现
ucosii 任务调度和原理1、ucos-ii 任务创建与任务调度 1.1、任务的创建 当你调用 OSTaskCreate( ) 进行任务的创建的时候,会初始化任务的堆栈、保存cpu的寄存器、创建任务的控制块(OS_TCB)等的操作; if (OSTCBPrioTbl[prio] (OS_…...

Solon2 开发之容器,七、切面与函数环绕拦截
想要环绕拦截一个 Bean 的函数。需要三个前置条件: 通过注解做为“切点”,进行拦截(不能无缘无故给拦了吧?费性能)Bean 的 method 是被代理的在 Bean 被扫描之前,完成环绕拦截的注册 1、定义切点和注册环…...
代码随想录第十天(28)
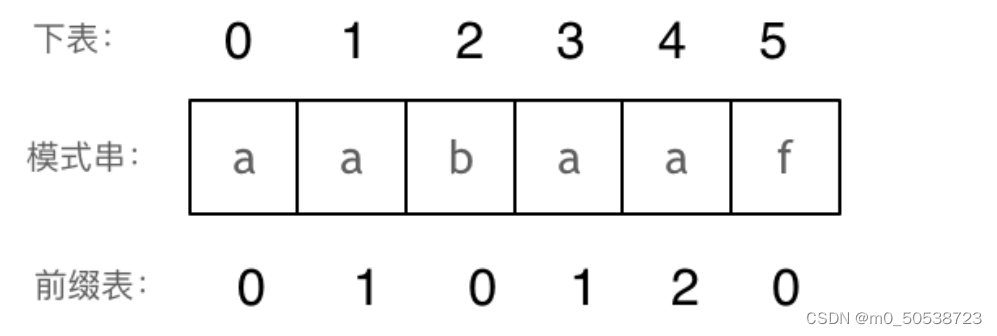
文章目录28. 找出字符串中第一个匹配项的下标看答案KMPnext数组(前缀表)最长公共前后缀如何计算前缀表前缀表与next数组时间复杂度分析28. 找出字符串中第一个匹配项的下标 莫得思路……好久没做题,都已经忘得差不多了 看答案 其实就是自己…...
循环队列来了解一下!!
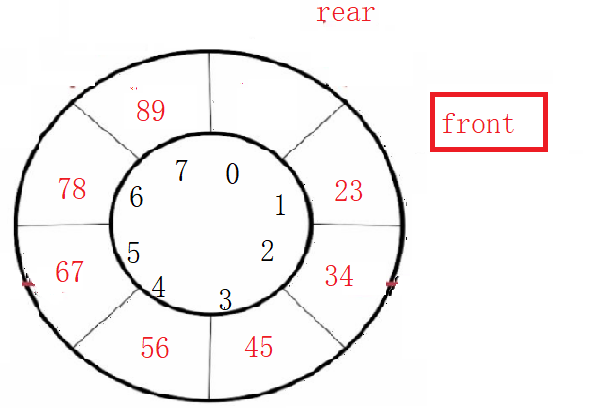
笔者在之前的一篇文章,详细的介绍了:队列之单向链表与双向链表的模拟实现:https://blog.csdn.net/weixin_64308540/article/details/128742090?spm1001.2014.3001.5502 感兴趣的各位老铁,可以参考一下啦!下面进入循环…...
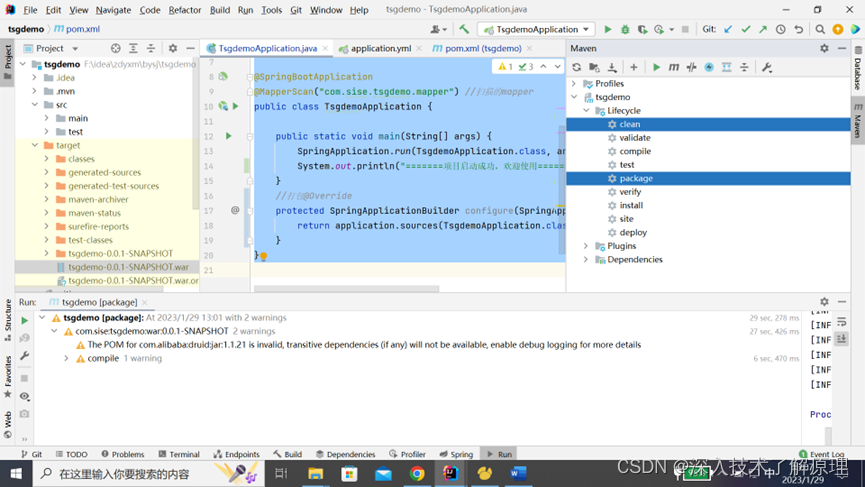
Idea打包springboot项目war包,测试通过
pom.xml文件 <!--包名以及版本号,这个是打包时候使用,版本可写可不写,建议写有利于维护系统--> <artifactId>tsgdemo</artifactId> <version>0.0.1-SNAPSHOT</version> <!--打包形式--> <packaging&…...

python+django高校师生健康信息管理系统pycharm
管理员功能模块 4.1登录页面 管理员登录,通过填写注册时输入的用户名、密码、角色进行登录,如图所示。 4.2系统首页 管理员登录进入师生健康信息管理系统可以查看个人中心、学生管理、教师管理、数据收集管理、问卷分类管理、疫情问卷管理、问卷调查管理…...

CUDA中的流序内存分配
文章目录CUDA中的流序内存分配1. Introduction2. Query for Support3. API Fundamentals (cudaMallocAsync and cudaFreeAsync)4. Memory Pools and the cudaMemPool_t注意:设备的内存池当前将是该设备的本地。因此,在不指定内存池的情况下进行分配将始终…...
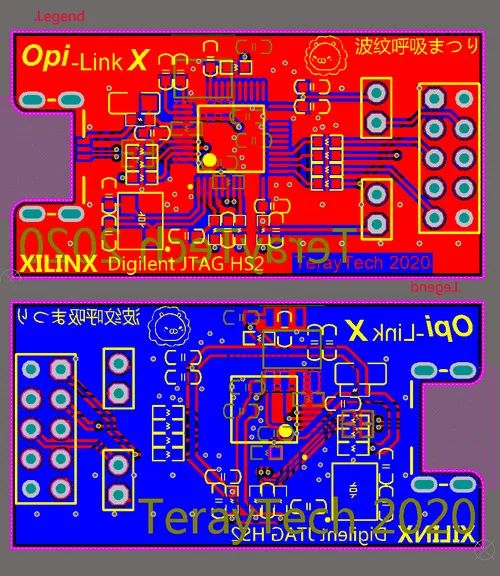
开源、低成本的 Xilinx FPGA 下载器(高速30MHz)
目前主流的Xilinx下载器主要有两种:一种是Xilinx官方出品的Xilinx Platfom Cable USB,还有一个就是Xilinx的合作伙伴Digilent开发的JTAG-HS3 Programming Cable。 JTAG-HS系列最大支持30MHz下载速度,基于FTDI的FT2232方案。 JTAG-HS系列对比…...

Maven专题总结
1. 什么是Maven Maven 是一个项目管理工具,它包含了一个项目对象模型 (POM: Project Object Model),一组标准集合,一个项目生命周期(Project Lifecycle),一个依赖管理系统(Dependency Management System),和…...
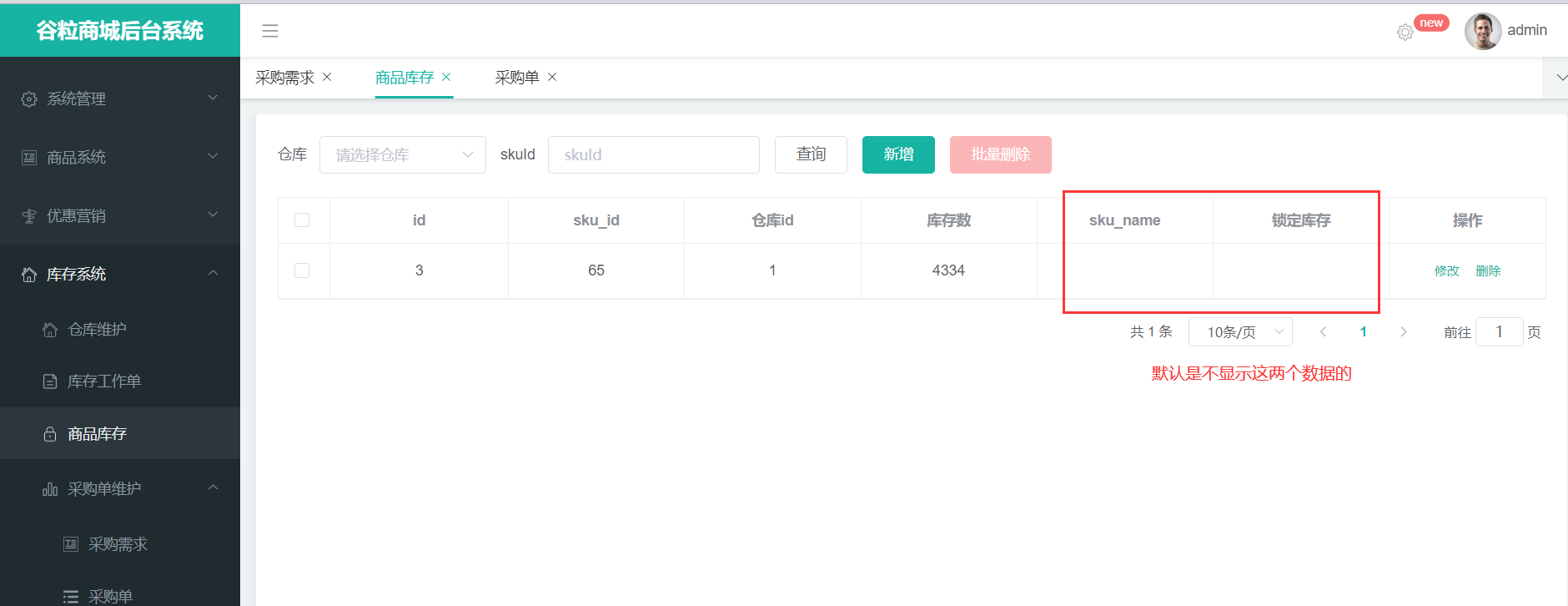
谷粒商城--SPU和SKU
目录 1.SPU和SKU概念 2.表的关系理解 3.导入前端代码 4.完善后端接口 5.属性分组详情 6.规格参数详情 7. 销售属性详情 8.分组与属性关联 9.发布商品 10.仓库服务 1.SPU和SKU概念 SPU:standard product unit(标准化产品单元):是商品信息聚合的…...
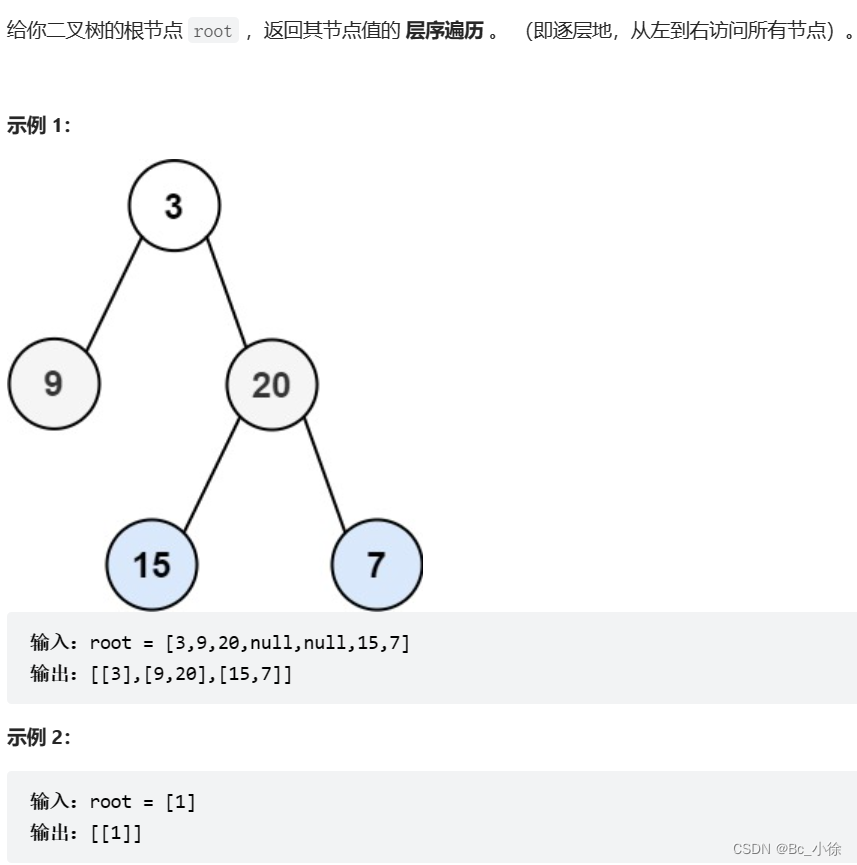
二叉树OJ题(上)
✅每日一练:100. 相同的树 - 力扣(LeetCode) 题目的意思是俩棵树的结构不仅要相同,而且每个节点的值还要相同,如果满足上面2个条件,则成立! 解题思路: 从三个方面去考虑࿱…...
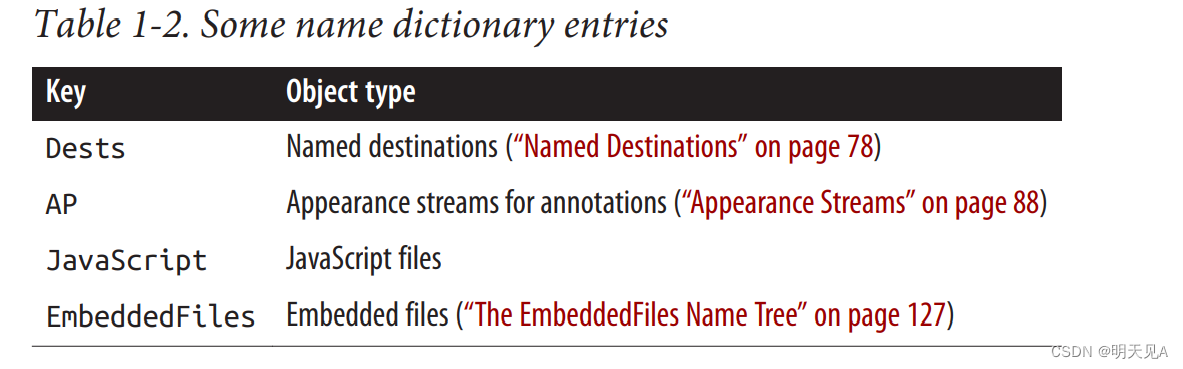
第一章 PDF语法
第一章 PDF语法PDF ObjectsNull ObjectsBoolean ObjectsNumeric ObjectsName ObjectsString ObjectsArray ObjectsDictionary ObjectsName treesNumber treesStream ObjectsDirect versus Indirect ObjectsFile StructureWhite-SpaceThe Four Sections of a PDFHeaderTrailerBo…...

IntelliJ IDEA 创建JavaFX项目运行
IntelliJ IDEA 创建JavaFX项目运行JavaFX官网文档:https://openjfx.io/openjfx-docs/ JavaFX 2008年12月05日诞生,是一个开源的下一代客户端应用程序平台,适用于基于 Java 构建的桌面、移动和嵌入式系统。这是许多个人和公司的协作努力&#…...
IC封装常见形式
参考:https://blog.csdn.net/dhs888888/article/details/127673300?utm_mediumdistribute.pc_relevant.none-task-blog-2defaultbaidujs_baidulandingword~default-0-127673300-blog-115610343.pc_relevant_multi_platform_whitelistv4&spm1001.2101.3001.4242…...

Linux通配符、转义符讲解
目录 通配符 通过通配符定义匹配条件 转义符 将所有的逻辑操作符都转换成字符 通配符 通过通配符定义匹配条件 * 任意字符都可以通配(也可以匹配空值) ? 匹配单个字符 [a-z] 匹配单个的小写英文字母 [A-Z] 匹配单个的大写英文…...

[OpenMMLab]提交pr时所需的git操作
git开发流程 准备工作 作为一个开发者,fork一个仓库之后应该先做什么? 1、下载仓库,创建上游代码库,查看当前的分支情况 git clone https://github.com/<your_name>/<repo_name>.git git remote add upstream git…...
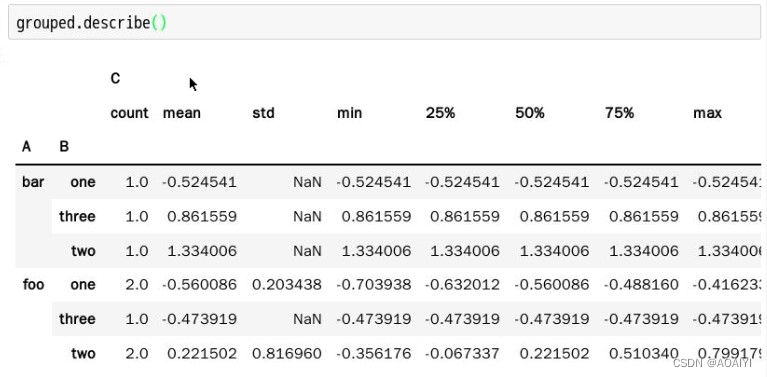
pandas——groupby操作
Pandas——groupby操作 文章目录Pandas——groupby操作一、实验目的二、实验原理三、实验环境四、实验内容五、实验步骤一、实验目的 熟练掌握pandas中的groupby操作 二、实验原理 groupby(byNone, axis0, levelNone, as_indexTrue, sortTrue, group_keysTrue, squeezeFalse&…...
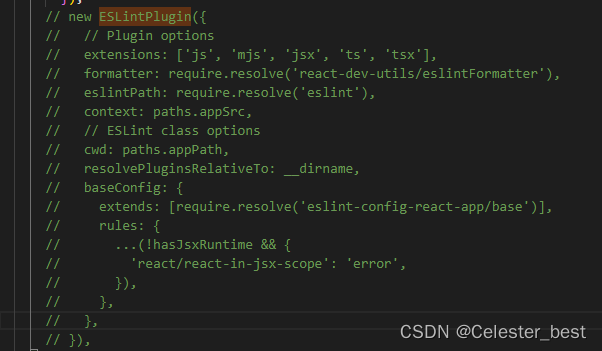
webpack.config.js哪里找?react项目关闭eslint监测
目录 webpack.config.js哪里找? react项目关闭eslint监测 webpack.config.js哪里找? 在React项目中,当我们需要修改一些配置时,发现找不到webpack.config.js,是我们创建的项目有问题吗,还需新创建项目的项…...
OpenCV 图像梯度算子
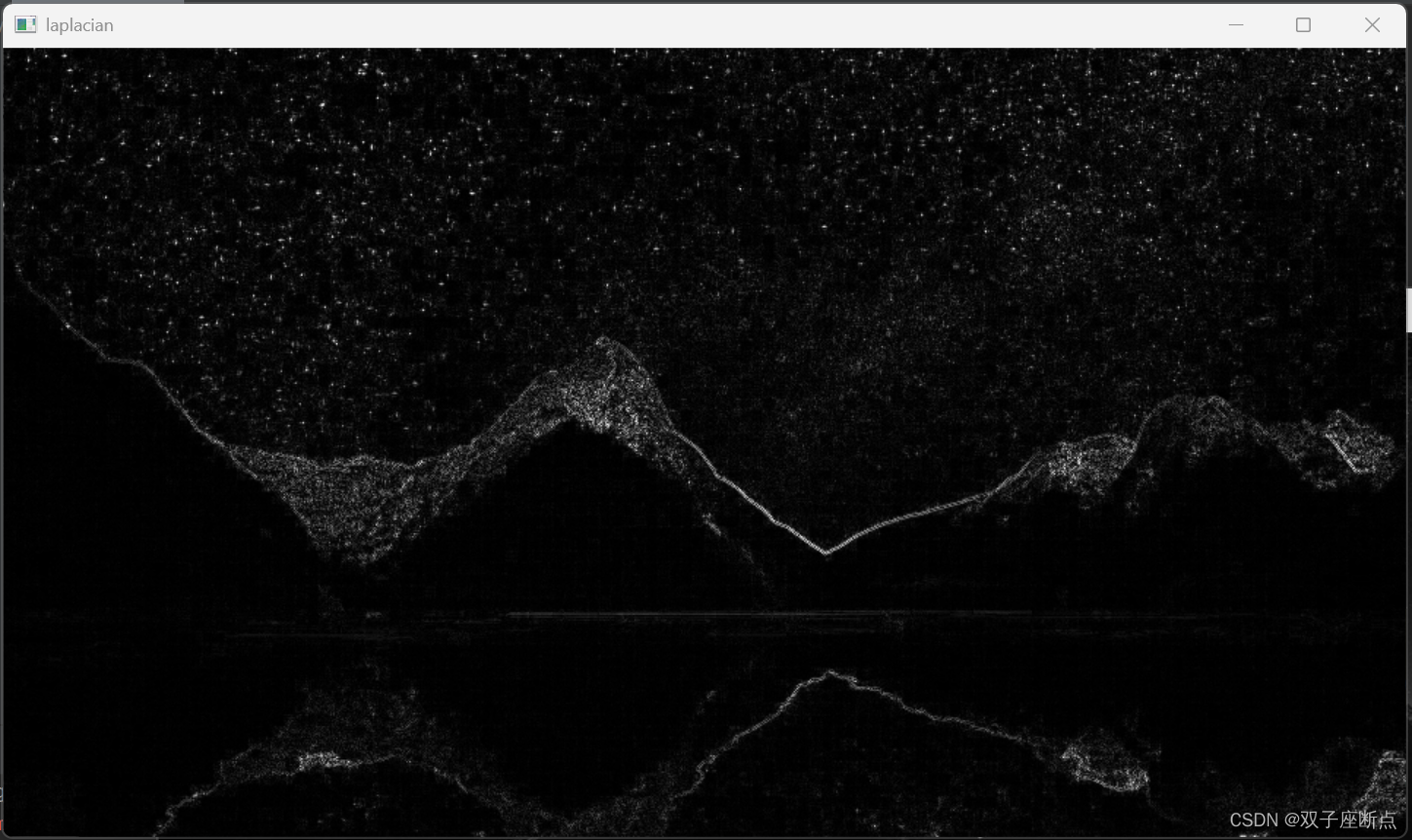
本文是OpenCV图像视觉入门之路的第12篇文章,本文详细的介绍了图像梯度算子的各种操作,例如:Sobel算子Scharr算子laplacian算子等操作。 OpenCV 图像梯度算子目录 1 Sobel算子 2 Scharr算子 3 laplacian算子 1 Sobel算子 Sobel算子是一种图…...
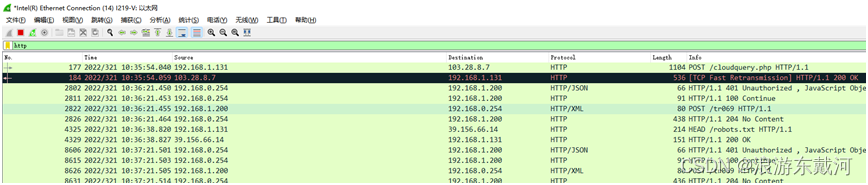
Linux c编程之Wireshark
Wireshark是一个网络报文分析软件,是网络应用问题分析必不可少的工具软件。网络管理员可以使用wireshark排查网络问题。程序开发人员可以用来分析应用协议、定位分析应用问题。无论是网络应用程序开发人员、测试人员、部署人员、技术支持人员,掌握wireshark的使用对于分析网络…...

3步免费获取公式识别神器:img2latex-mathpix本地部署终极指南
3步免费获取公式识别神器:img2latex-mathpix本地部署终极指南 【免费下载链接】img2latex-mathpix Mathpix has changed their billing policy and no longer has free monthly API requests. This repo is now archived and will not receive any updates for the …...

慕尼黑电子展:洞察汽车电子、工业物联网与功率半导体技术趋势
1. 从慕尼黑看全球电子产业:一场技术与商业的“双向奔赴”又到了双数年的十一月,全球电子工程师和产业领袖的目光,不约而同地再次聚焦于德国慕尼黑。没错,Electronica——这个被誉为全球电子元器件行业“晴雨表”的顶级盛会&#…...

【独家】Lindy内部SLO白皮书泄露:自主工作流SLA达标率低于99.95%的5个致命信号
更多请点击: https://intelliparadigm.com 第一章:Lindy AI Agent自主工作流的核心架构与SLO哲学 Lindy AI Agent 的核心架构基于“自治闭环”(Autonomous Closed Loop)范式,将任务规划、工具调用、状态反馈与自校准能…...

工程师视角:最低成本脱碳路径与气候解决方案的工程化思维
1. 项目概述:一封关于气候与经济的公开信最近在EE Times上读到一封写给埃隆马斯克的公开信,作者格伦温瑞布提出了一些关于气候变化和联邦预算赤字的想法,挺有意思的。这封信的核心不是空谈环保理念,而是从一个工程师和务实主义者的…...

必看!移动岗亭厂家交货及时性测评,日硕科技排名第一!
《【移动岗亭厂家交货及时性】哪家好:专业深度测评排名前五》开篇:定下基调在当今快节奏的商业环境中,移动岗亭的采购方对于厂家的交货及时性愈发重视。及时的交货能够确保项目按时推进,避免不必要的延误和损失。本次测评的目的就…...
)
Hi3559AV100 MPP开发:从IMX334到HDMI输入,VI参数配置避坑指南(含/proc/umap解析)
Hi3559AV100 MPP开发实战:非标准HDMI输入与VI参数配置深度解析 当我们需要在Hi3559AV100平台上接入HDMI视频源时,传统的MIPI摄像头配置方案往往无法直接适用。本文将从一个真实项目案例出发,详细讲解如何将原本为IMX334 MIPI摄像头设计的VI参…...

从SPI模式0到Quad I/O:手把手带你玩转W25Q128JV的性能压榨与接口升级
从SPI模式0到Quad I/O:W25Q128JV性能优化实战指南 在嵌入式系统设计中,存储器的性能往往成为整个系统响应速度的瓶颈。W25Q128JV这颗128Mbit容量的串行Flash芯片,凭借其灵活的接口配置和出色的性价比,已成为众多物联网设备、消费电…...

计算机视觉数据集选型实战指南:从COCO到Roboflow的工程决策框架
1. 这份清单不是“资料库目录”,而是计算机视觉工程师的实战弹药箱如果你正在训练一个能识别工业零件表面微小划痕的模型,却在COCO数据集上反复调参;或者你刚拿到一批医院提供的CT影像,第一反应是去Kaggle搜“medical image datas…...

基于MCP协议与向量数据库构建AI编程助手私有记忆系统
1. 项目概述:为你的AI编程助手打造一个“记忆宫殿”如果你和我一样,重度依赖Cursor这类AI编程助手,那你肯定遇到过这个痛点:昨天刚和它深入讨论过一个复杂的业务逻辑实现,今天想参考一下,却发现在浩如烟海的…...

让 Agent 也能发邮件:Cloudflare Email Service 正式公测
原文:Cloudflare Email Service: now in public beta. Ready for your agents 邮件是世界上最通用的接口 不需要下载特定 App,不需要接入自定义 SDK,不需要注册新平台。全球几十亿人都有邮箱,任何人都可以通过一封邮件和你的应用…...