opencv-python图像增强二:图像去雾(暗通道去雾)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 一、简介:
- 二、暗通道去雾方案简述:
- 三、算法实现步骤
- 3.1最小值滤波
- 3.2 引导滤波
- 3.3 计算图像全局光强
- 四:整体代码实现
- 五:效果
一、简介:
图像去雾是计算机视觉领域中的一个重要问题,其目的是恢复被雾气遮挡的图像中的真实细节。在自然场景中,雾气会导致图像的对比度下降、颜色失真以及细节模糊。去雾算法的主要目标是在保留图像内容的同时,尽可能地恢复被雾气遮挡的信息。本次使用的算法为暗通道去雾,暗通道去雾算法基于暗通道先验理论,该理论指出在自然场景的任意一点(除天空外),其暗通道图像中的像素值在大部分情况下都接近于0。通过提取暗通道图像,并对其进行去雾处理,可以恢复图像中的真实细节。
二、暗通道去雾方案简述:
在图像去雾处理中,我们采取以下步骤来提升图像质量:
首先,我们从三通道彩色图片中提取每个像素的最小值,并将其拆解为单通道图像。这一步帮助我们识别出图像中最暗的部分。
接着,我们对这个单通道图像进行最小值滤波操作,这一过程有助于进一步提取图像的暗部信息,使得暗部特征更加明显。
然后,为了去除暗部噪声并模糊图像细节,我们对提取出的暗部图像进行引导滤波处理。这一步骤有助于平滑图像,同时保留重要的结构信息。
接下来,我们计算全局光强值A,这个值用于排除天空等过曝区域,确保去雾效果更加自然。
最后,我们对原图像的每个通道分别减去暗通道,以保留暗部细节并校正颜色与亮度。这个过程可以理解为对雾气影响的校正。经过这一步骤处理后,新的图像暗通道接近零,这意味着图像中的雾气已被有效去除,从而得到清晰、无雾的图片。
三、算法实现步骤
3.1最小值滤波
最小值滤波是一种图像处理技术,其工作原理是在图像中每个像素点的邻域内,找出所有像素值中的最小值,并用这个最小值替换掉原始像素点的值。这个过程对于突出图像中的暗部细节非常有用,尤其是在去除图像噪声和增强图像对比度方面。
代码如下:
# 定义一个函数,用于对灰度图像进行最小值滤波
def zmMinFilterGray(src, r=7):# 检查输入图像的形状是否正确if len(src.shape) != 2:raise ValueError("输入图像必须是灰度图像")# 定义结构元素,它是一个由全1组成的矩形核,半径为rstructure_element = np.ones((2 * r + 1, 2 * r + 1))# 使用OpenCV的erode函数对输入图像进行腐蚀操作# 腐蚀操作可以理解为用结构元素覆盖图像的每个像素,并保留覆盖区域的最小值# 这里使用的是全1的结构元素,因此腐蚀操作相当于最小值滤波result = cv2.erode(src, structure_element)# 返回腐蚀操作后的结果return result
3.2 引导滤波
引导滤波(Guided Filter)是一种用于图像滤波的算法,它利用引导图像的内容来对目标图像进行滤波处理,同时保持目标图像的边缘和细节。引导滤波的核心思想是假设引导图像与目标图像在局部区域具有相似的结构,因此可以借助引导图像的特性来对目标图像进行滤波。
代码如下(示例):
def guidedfilter(I, p, r, eps):# 获取图像的高度和宽度height, width = I.shape# 计算引导图像I的局部均值m_I = cv2.boxFilter(I, -1, (r, r))# 计算输入图像p的局部均值m_p = cv2.boxFilter(p, -1, (r, r))# 计算引导图像I和输入图像p的局部乘积的均值m_Ip = cv2.boxFilter(I * p, -1, (r, r))# 计算引导图像I和输入图像p的局部协方差cov_Ip = m_Ip - m_I * m_p# 计算引导图像I自身的局部协方差,即局部方差m_II = cv2.boxFilter(I * I, -1, (r, r))var_I = m_II - m_I * m_I# 估计线性系数aa = cov_Ip / (var_I + eps)# 估计线性系数bb = m_p - a * m_I# 对系数a和b进行全局均值滤波,得到平滑的系数m_a = cv2.boxFilter(a, -1, (r, r))m_b = cv2.boxFilter(b, -1, (r, r))# 计算输出图像,即m_a * I + m_breturn m_a * I + m_b
参数说明:
I: 输入图像,可以是灰度图像或彩色图像。
p: 引导图像,用于指导滤波器。引导图像应与输入图像具有相同的尺寸和类型。
r: 引导滤波器的半径,以像素为单位。较大的半径可以覆盖更多的像素,从而更好地平滑噪声,但可能会模糊边缘。较小的半径则可以更好地保留边缘细节,但去噪效果可能不够理想。
eps: 引导滤波器的正则化参数。较大的值可以更好地平滑噪声,但可能会模糊图像的细节。较小的值则可以更好地保留细节,但去噪效果可能不够理想。
3.3 计算图像全局光强
在暗通道去雾算法中,计算全局光强A的原因如下:
1.恢复无雾图像:去雾的目标是从带雾图像中恢复出无雾图像。为了做到这一点,需要估计场景中光线的原始强度,即在没有大气散射影响下的光强。全局光强A代表了场景中最亮区域的原始光线强度。
2.指导去雾过程:全局光强A是去雾算法中的一个关键参数,它用于指导如何从带雾图像中恢复出无雾图像的颜色和亮度。通过计算A,可以更准确地估计每个像素点在无雾状态下的光线强度。
3.避免颜色失真:如果全局光强A的估计不准确,去雾后的图像可能会出现颜色失真或过曝现象。因此,准确计算A对于保持图像的自然颜色和细节至关重要。
代码如下(示例):
# 定义一个变量,用于设置直方图的桶数
bins = 2000
# 计算暗通道图像V1的直方图
ht = np.histogram(V1, bins)
# 计算累积分布函数d,用于找到累积概率接近0.999的亮度值
d = np.cumsum(ht[0]) / float(V1.size)
# 遍历直方图的每个桶,从最后一个桶开始向前搜索
for lmax in range(bins - 1, 0, -1):# 如果累积分布函数d的值大于或等于0.999,则找到合适的亮度值if d[lmax] <= 0.999:break
# 计算大气光照系数A,即暗通道图像V1中累积概率大于或等于0.999的像素点的最大值
A = np.mean(m, 2)[V1 >= ht[1][lmax]].max()
# 对值范围进行限制,确保V1的值在合理的范围内
V1 = np.minimum(V1 * w, maxV1)这段代码简单来说就是将图像亮度分为2000个等级,用累积分布函数的概率找到图像中过亮区域像素值所在的范围,计算原图三通道像素值取出其均值所代表的新图像,按照范围取出新图像中的所代表区域的最大值,用来代表天空等区域的像素值,至此暗通道去雾所需要的关键算法就整理完毕了,之后需要的就是将这些算法集成起来构筑为一个完整的暗通道去雾算法。
四:整体代码实现
import cv2
import numpy as npdef zmMinFilterGray(src, r=7):return cv2.erode(src, np.ones((2 * r + 1, 2 * r + 1)))def guidedfilter(I, p, r, eps):m_I = cv2.boxFilter(I, -1, (r, r))m_p = cv2.boxFilter(p, -1, (r, r))m_Ip = cv2.boxFilter(I * p, -1, (r, r))cov_Ip = m_Ip - m_I * m_pm_II = cv2.boxFilter(I * I, -1, (r, r))var_I = m_II - m_I * m_Ia = cov_Ip / (var_I + eps)b = m_p - a * m_Im_a = cv2.boxFilter(a, -1, (r, r))m_b = cv2.boxFilter(b, -1, (r, r))return m_a * I + m_bdef Defog(m, r, eps, w, maxV1): # 输入rgb图像,值范围[0,1]'''计算大气遮罩图像V1和光照值A, V1 = 1-t/A'''V1 = np.min(m, 2)max_values = np.max(m, axis=2)# 得到暗通道图像Dark_Channel = zmMinFilterGray(V1, 7)cv2.imshow('V1', V1)cv2.imshow('20190708_Dark',Dark_Channel) # 查看暗通cv2.waitKey(0)cv2.destroyAllWindows()V1 = guidedfilter(V1, Dark_Channel, r, eps) # 使用引导滤波优化bins = 2000ht = np.histogram(V1, bins)d = np.cumsum(ht[0]) / float(V1.size)for lmax in range(bins - 1, 0, -1):if d[lmax] <= 0.999:breakA = np.mean(m, 2)[V1 >= ht[1][lmax]].max()V1 = np.minimum(V1 * w, maxV1) # 对值范围进行限制return V1, Adef deHaze(m, r=81, eps=0.001, w=0.95, maxV1=0.80, bGamma=False):Y = np.zeros(m.shape)Mask_img, A = Defog(m, r, eps, w, maxV1) # 得到遮罩图像和大气光照for k in range(3):print((m[:,:,k] - Mask_img))Y[:,:,k] = (m[:,:,k] - Mask_img)/(1-Mask_img/A) # 颜色校正Y = np.clip(Y, 0, 1)if bGamma:Y = Y ** (np.log(0.5) / np.log(Y.mean())) # gamma校正,默认不进行该操作return Y
if __name__ == '__main__':m = (deHaze(cv2.imread(r'F:\traditional_vison\R-C.jfif') / 255.0) * 255).astype(np.uint8)cv2.imshow("ccccc",m)cv2.waitKey(0)# cv2.imwrite('20190708_02.png', m)
五:效果
图片原图:

暗通道图:
增强后效果图:

相关文章:
opencv-python图像增强二:图像去雾(暗通道去雾)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 一、简介:二、暗通道去雾方案简述:三、算法实现步骤3.1最小值滤波3.2 引导滤波3.3 计算图像全局光强 四:整体代码实现五…...

自研Vue3低代码海报制作平台第一步:基础拖拽组件开发
学习来源:稀土掘金 - 幽月之格大佬的技术专栏可拖拽、缩放、旋转组件 - 著作:可拖拽、缩放、旋转组件实现细节 非常感谢大佬!受益匪浅! 前面我们学习了很多vue3的知识,是时候把它们用起来做一个有意思的平台…...

QT 的 QSettings 读写 INI 文件的示例
在Qt中,QSettings 类提供了一种便捷的方式来存储和访问应用程序的设置,这些设置可以存储在多种格式的文件中,包括INI、Windows注册表(仅Windows平台)、XML和JSON等。以下是一些使用 QSettings 读写INI文件的示例。 写…...

【零基础学习CAPL语法】——testStep:测试结果输出函数
文章目录 1.函数介绍2.在报告中体现 1.函数介绍 testStep——测试结果输出函数 2.在报告中体现 //testStep() void PrintTxMsg() {testStep("Tx","[%x] [%.2x %.2x %.2x %.2x %.2x %.2x %.2x %.2x]",Diag_Req.id,Diag_Req.byte(0),Diag_Req.byte(1),Di…...

8.5.数据库基础技术-规范化
函数依赖 函数依赖:给定一个X,能唯一确定一个Y,就称X决定(确定)Y,或者说Y依赖于X。 例如:YX*X函数,此时X能确定Y的值,但是Y无法确定X的值,比如x2,y4,但是y4无法确定x2。函数依赖又可扩展以下两…...
于博士Cadence视频教程学习笔记备忘
标签:PCB教程 PCB设计步骤 cadence教程 Allegro教程 以下是我学习该视频教程的笔记,记录下备忘,欢迎大家在此基础上完善,能回传我一份是最好了,先谢过。 备注: 1、未掌握即未进行操作 2、操作软件是15.…...
8.3.数据库基础技术-关系代数
并:结果是两张表中所有记录数合并,相同记录只显示一次。交:结果是两张表中相同的记录。差:S1-S2,结果是S1表中有而S2表中没有的那些记录。 笛卡尔积:S1XS2,产生的结果包括S1和S2的所有属性列,并且S1中每条记…...
【Vue3】vue模板中如何使用enum枚举类型
简言 有的时候,我们想在vue模板中直接使用枚举类型的值,来做一些判断。 ts枚举 枚举允许开发人员定义一组命名常量。使用枚举可以更容易地记录意图,或创建一组不同的情况。TypeScript 提供了基于数字和字符串的枚举。 枚举的定义这里不说了…...

组合求和2
题目描述: Given a collection of candidate numbers (candidates) and a target number (target), find all unique combinations in candidates where the candidate numbers sum to target. Each number in candidates may only be used once in the combinati…...
Apple Maps现在可在Firefox和Mac版Edge浏览器中使用
Apple Maps最初只能在 Windows 版 Safari、Chrome 浏览器和 Edge 浏览器上运行,现在已在其他浏览器上运行,包括 Mac 版 Firefox 和 Edge。经过十多年的等待,Apple Maps于今年 7 月推出了新版地图应用的测试版,但只能在有限的浏览器…...
基于嵌入式Linux的数据库
数据库 数据库是在数据库管理系统和控制之下,存放在存储 介质上的数据集合。 基于嵌入式的数据库 基于嵌入式linux的数据库主要有SQlite, Firebird,Berkeley DB,eXtremeDB Firebird是关系型数据库,功能强大,支持存储过 程&…...

C# 使用LINQ找出一个子字符串在另一个字符串中出现的所有位置
一、实现步骤 遍历主字符串,使用IndexOf方法查找子字符串的位置。如果找到了子字符串,记录其位置,并且从该位置的后面继续查找。重复上述步骤直到遍历完整个字符串。 二、简单代码示例 using System; using System.Collections.Generic; usi…...
)
YOLOv8添加MobileViTv3模块(代码+free)
目录 一、理由 二、方法 (1)导入MobileViTv3模块 (2)在ultralytics/nn/tasks.py的函数parse_model中修改 (3)在yaml配置文件中写入 (4)开始训练,先把其他梯度关闭&…...

从概念到落地:全面解析DApp项目开发的核心要素与未来趋势
随着区块链技术的迅猛发展,去中心化应用程序(DApp)逐渐成为Web3时代的重要组成部分。DApp通过智能合约和分布式账本技术,提供了无需信任中介的解决方案,这种去中心化的特性使其在金融、游戏、社交等多个领域得到了广泛…...
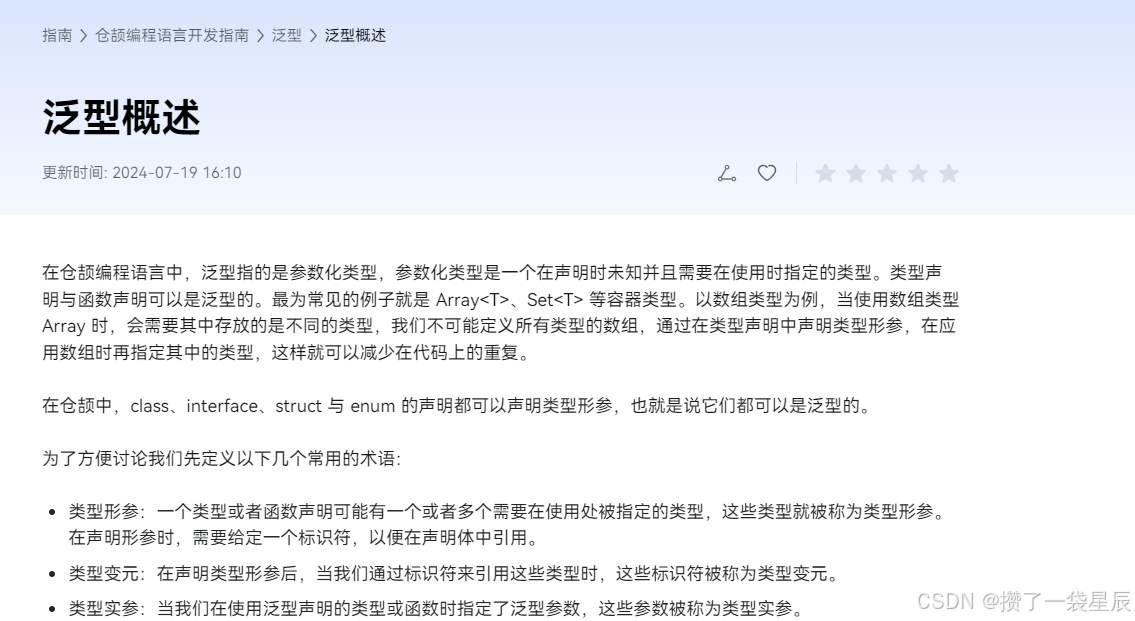
仓颉编程入门 -- 泛型概述 , 如何定义泛型函数
泛型概述 , 如何定义泛型函数 1 . 泛型的定义 在仓颉编程语言中,泛型机制允许我们定义参数化类型,这些类型在声明时不具体指定其操作的数据类型,而是作为类型形参保留,待使用时通过类型实参来明确。这种灵活性在函数和类型声明中…...
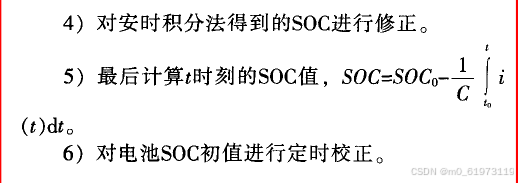
SOC估算方法之(OCV-SOC+安时积分法)
一、引言 此方法主要参考电动汽车用磷酸铁锂电池SOC估算方法这篇论文 总结: 开路电压的测量需要将电池静止相当长的一段时间才能达到平衡状态进行测量。 安时积分法存在初始SOC的估算和累积的误差。 所以上述两种方法都存在一定的缺陷,因此下面主要讲…...
)
指针(下)
文章目录 指针(下)野指针、空指针野指针空指针 二级指针**main**函数的原型说明 常量指针与指针常量常量指针指针常量常量指针常量 动态内存分配常用函数**malloc****calloc****realloc****free** **void**与**void***的区别扩展:形式参数和实际参数的对应关系 指针…...

C# 浅谈IEnumerable
一、IEnumerable 简介 IEnumerable 是一个接口,它定义了对集合进行迭代所需的方法。IEnumerable 接口主要用于允许开发者使用foreach循环来遍历集合中的元素。这个接口定义了一个名为 GetEnumerator 的方法,该方法返回一个实现了 IEnumerator 接口的对象…...

mmdebstrap:创建 Debian 系统 chroot 环境的利器 ️
文章目录 mmdebstrap 的一般性参数说明 📜mmdebstrap 的常见用法示例 🌈使用 mmdebstrap 的注意事项 ⚠️ 🌈你好呀!我是 山顶风景独好 🎈欢迎踏入我的博客世界,能与您在此邂逅,真是缘分使然&am…...

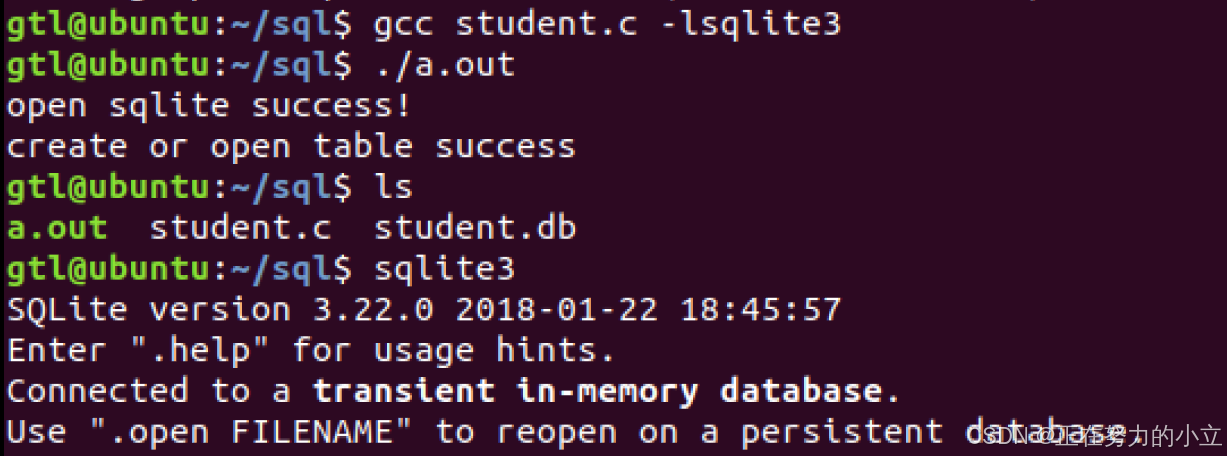
【Linux SQLite数据库】一、SQLite交叉编译与移植
SQLite 是一个用 C 语言编写的开源、轻量级、快速、独立且高可靠性的 SQL 数据库引擎,它提供了功能齐全的数据库解决方案。SQLite 几乎可以在所有的手机和计算机上运行,它被嵌入到无数人每天都在使用的众多应用程序中。此外,SQLite 还具有稳定…...

如何用applera1n免费绕过iOS激活锁:完整指南与操作教程
如何用applera1n免费绕过iOS激活锁:完整指南与操作教程 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 你是否购买了一部二手iPhone或iPad,却发现设备被原主人的Apple ID锁定&a…...

【ZYNQ】AXI4总线协议实战:从握手时序到PS-PL高效通信
1. AXI4总线协议基础:从握手信号到通道架构 第一次接触ZYNQ的PS-PL通信时,我被AXI4协议里那些VALID/READY信号搞得头晕眼花。直到在示波器上抓到真实的握手波形,才突然理解这个看似复杂的协议其实像极了我们日常的对话机制——只有当说话方准…...

OpenCore Legacy Patcher终极指南:5步让老旧Mac完美运行最新macOS系统
OpenCore Legacy Patcher终极指南:5步让老旧Mac完美运行最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher OpenCore Legacy Patcher是…...

终极指南:如何使用Autoclick实现Mac自动点击900次/秒
终极指南:如何使用Autoclick实现Mac自动点击900次/秒 【免费下载链接】Autoclick A simple Mac app that simulates mouse clicks 项目地址: https://gitcode.com/gh_mirrors/au/Autoclick 你是否厌倦了重复性的鼠标点击工作?无论是游戏中的重复操…...

终极Windows Defender移除指南:13项核心服务的完整卸载方案
终极Windows Defender移除指南:13项核心服务的完整卸载方案 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcode.com/gh_mirror…...

前端工程化实战:基于 Kelivo 模板的配置即代码与自动化工作流
1. 项目概述与核心价值最近在整理个人开发环境时,发现一个挺有意思的项目,叫Chevey339/kelivo。乍一看这个仓库名,可能有点摸不着头脑,但点进去之后,你会发现它是一个围绕特定开发工具或框架进行深度定制、优化和功能增…...

基于RP2040与CircuitPython的HDMI倒计时器:RTC与DVI原生输出实践
1. 项目概述与核心价值如果你手头有一块带HDMI输出的微控制器开发板,比如Adafruit的Feather RP2040 DVI,又恰好需要一个能摆在桌面上、精确到秒的倒计时器,那么今天这个项目就是为你量身定做的。它不仅仅是一个简单的“Hello World”式显示应…...

Shell脚本加固实战:用shellguard提升脚本健壮性与安全性
1. 项目概述:一个为Shell脚本穿上“防弹衣”的守护者 在运维开发、自动化部署乃至日常的系统管理工作中,Shell脚本是我们最忠实、最高效的伙伴。从简单的日志清理到复杂的CI/CD流水线,Shell脚本无处不在。然而,脚本的安全性、健壮…...

Arm Iris组件参数化建模与调试实践
1. Arm Iris组件概述与核心价值Arm Iris组件是Fast Models仿真平台中的关键模块,它为芯片设计验证和软件开发提供了高度参数化的虚拟原型环境。作为一名长期从事Arm架构开发的工程师,我发现Iris组件的设计理念完美体现了"配置即硬件"的思想——…...

MedAgentBench:大语言模型在医学诊断中的动态评估与智能体构建实践
1. 项目概述:当大语言模型成为医学诊断的“实习生”最近在医学人工智能的圈子里,一个名为MedAgentBench的项目引起了我的注意。它来自斯坦福大学机器学习组,这个名字本身就自带光环。简单来说,这不是一个直接看病的AI,…...