SLAM算法之HectorSLAM,Gmapping,KartoSLAM,CoreSLAM和LagoSLAM
文章将介绍使用的基于机器人操作系统(ROS)框架工作的SLAM算法。 在ROS中提供的五种基于2D激光的SLAM算法分别是:HectorSLAM,Gmapping,KartoSLAM,CoreSLAM和LagoSLAM。当然最后还有比较经典的google开源的cartographer,虽然不是基于ROS的但是大牛们已经将它修改为基于ROS的版本的cartographer_ros,
ROS(Robot Operating System)是一个基于Linux的开源操作系统,目的在于构建一个能够整合不同研究成果,实现算法,代码重用的机器人软件平台。ROS是当前比较流行的机器人控制框架,它让我们节省时间构建机器人的系统框架,更专注算法层面的研究。极大的提高了开发效率。提供了包括硬件抽象描述、底层设备控制、常用功能的实现,程序间信息的传递、程序包管理以及一些可视化数据程序和软件库,并在此平台的基础上开源了很多诸如定位构图,运动与规划,感知与决策等应用软件包。
机器人爆炸式增长的一个主要问题是不能在不同的机器人平台上重复使用代码。然而,ROS中的硬件抽象层及其消息服务允许创建可用于许多不同机器人平台的新代码。而且,ROS提供了一套稳定的机器人软件包,公认的SLAM评估方法都依赖于机器人社区可用的标准数据集。 本文中研究了基于激光的主要二维SLAM算法,所有SLAM的结果都使用占用网格作为最终输出,使用地图相似性的性能指标进行分析。 重点是放在地图质量,而不是姿态估计误差,因为映射输出受到本地化问题的高度影响。 主要目标是提供ROS中所有五种算法的优缺点概述,提供简单而准确的定量比较,从而为ROS开发者定义一个通用的指导方针,以选择最符合他们需求的算法。
(1)HectorSLAM
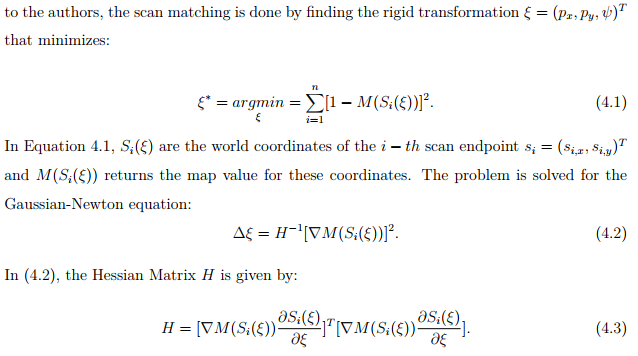
HectorSLAM是一种结合了鲁棒性较好的扫描匹方法2D SLAM方法和使用惯性传感系统的导航技术。传感器的要求:高更新频率小测量噪声的激光扫描仪.不需要里程计,使空中无人机与地面小车在不平坦区域运行存在运用的可能性.作者利用现代激光雷达的高更新率和低距离测量噪声,通过扫描匹配实时地对机器人运动进行估计。所以当只有低更新率的激光传感器时,即便测距估计很精确,对该系统都会出现一定的问题,如下图是该系统生成的二维地图。
http://kaspar.informatik.uni-freiburg.de/~slamEvaluation/datasets.php
http://www.ros.org/wiki/hector_slam
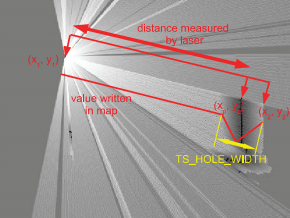
利用已经获得的地图对激光束点阵进行优化, 估计激光点在地图的表示,和占据网格的概率.,其中扫描匹配利用的是高斯牛顿的方法进行求解. 找到激光点集映射到已有地图的刚体转换(x,y,theta).具体的公式如下:
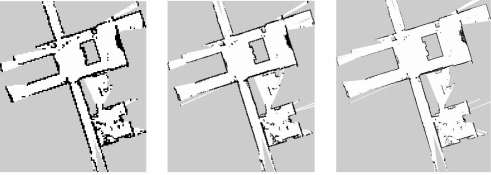
下图二维地图是hectorSLAM 多分辨率地图的表示。 网格单元格长度(从左到右):20厘米,10厘米和5厘米 ,使用多分辨率地图表示,以避免陷入局部最小化。 这个解决方案背后的想法是在内存中有不同的地图,同时使用之前估计的姿势来更新它们。 计算成本 仍然很低,所以地图总是一致的
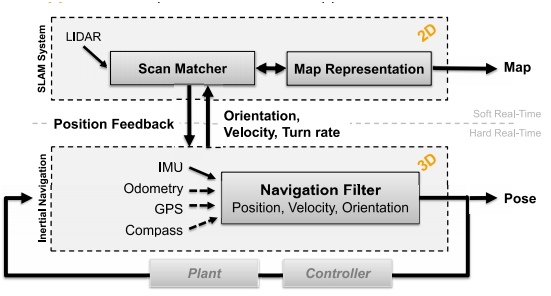
最后,3D空间导航状态估计是基于EKF滤波器。 但是,这种情况是仅在IMU存在时才需要,例如在空中机器人的情况下。 因此,这里我们只讨论二维的SLAM
它会将不再这项工作中使用。如下图显示了HectorSLAM方法的概述。
(2)Gmapping
Gmapping是一种基于激光的SLAM算法,它已经集成在ROS中,是移动机器人中使用最多的SLAM算法。这个算法已经由Grisetti等人提出是一种基于 Rao-Blackwellized的粒子滤波的 SLAM方法。基于粒子滤波的算法用许多加权粒子表示路径的后验概率,每个粒子都给出一个重要性因子。但是,它们通常需要大量的粒子才能获得比较好的的结果,从而增加该算法的的计算复杂性。此外,与PF重采样过程相关的粒子退化耗尽问题也降低了算法的准确性。粒子退化问题包括在重采样阶段从样本集粒子中消除大量的粒子。发生这种情况是因为它们的重要性权重可能变得微不足道。因此,这意味着有一定的小概率时间会消除正确的假设的粒子。为了避免粒子的退化问题,已经开发了自适应重采样技术。
作者还提出了一种计算精确分布的方法,不仅考虑机器人平台的运动,还考虑最近的观察。提出了在使用测距运动模型时结合观测值提出建议分布。然而,当一个移动机器人装备一个非常精确的传感器LRF时,可以使用该传感器的模型,因为它可以实现了极高的似然函数。 基于此,作者整合了最近的传感器观测zt,并且他们计算高斯分布近似有效地获得下一代粒子分布。
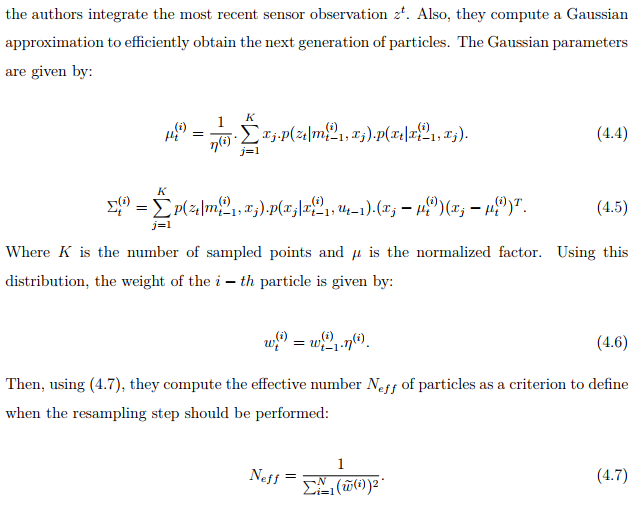
这种自适应重采样降低了PF预测步骤中机器人姿态的不确定性。 结果,由于扫描匹配过程,所需的粒子数量减少,因为不确定性较低。 实验中,Gmapping使用的粒子数量是30,与普通PF方法相比,这是非常低的。
(3)LagoSLAM
LagoSLAM 是线性近似图优化,不需要初始假设。基本的图优化slam的方法就是利用最小化非线性非凸代价函数.每次迭代, 解决局部凸近似的初始问题来更新图配置,过程迭代一定次数直到局部最小代价函数达到. (假设起始点经过多次迭代使得局部代价函数最小). 。假设图中每个节点的相对位置和方向都是独立的,作者求解了一个等价于非凸代价函数的方程组。为此,提出了一套基于图论的程序,通过线性定位和线性位置估计,得到非线性系统的一阶近似。
(4)KartoSLAM
KartoSLAM是基于图优化的方法,用高度优化和非迭代 cholesky矩阵进行稀疏系统解耦作为解.图优化方法利用图的均值表示地图,每个节点表示机器人轨迹的一个位置点和传感器测量数据集,箭头的指向的连接表示连续机器人位置点的运动,每个新节点加入,地图就会依据空间中的节点箭头的约束进行计算更新.
KartoSLAM的ROS版本,其中采用的稀疏点调整(the Spare Pose Adjustment(SPA))与扫描匹配和闭环检测相关.landmark越多,内存需求越大,然而图优化方式相比其他方法在大环境下制图优势更大.在某些情况下KartoSLAM更有效,因为他仅包含点的图(robot pose),求得位置后再求map.
(5)CoreSLAM
COreSLAM最小化性能损失的一种slam算法.将算法简化为距离计算与地图更新的两个过程, 第一步,每次扫描输入,基于简单的粒子滤波算法计算距离,粒子滤波的匹配器用于激光与地图的匹配,每个滤波器粒子代表机器人可能的位置和相应的概率权重,这些都依赖于之前的迭代计算. 选择好最好的假设分布,即低权重粒子消失,新粒子生成..在更新步骤,扫描得到的线加入地图中,当障碍出现时,围绕障碍点绘制调整点集,而非仅一个孤立点。
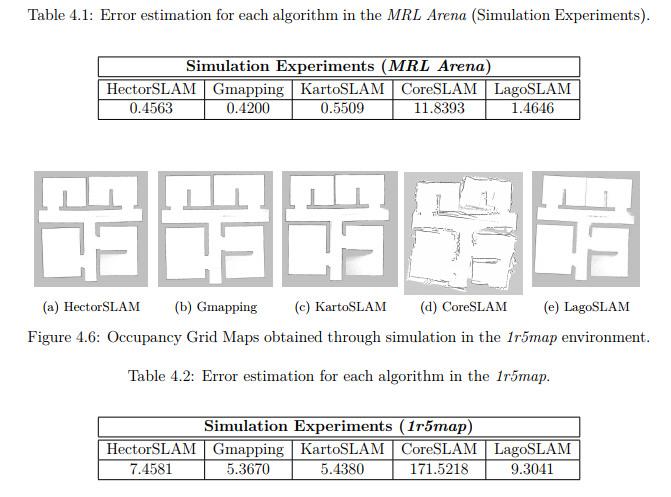
以上各种激光测距仪的SLAM的算法的对比:
(6)cartographer
cartographer是Google的实时室内建图项目,传感器安装在背包上面,可以生成分辨率为5cm的2D格网地图。获得的每一帧laser scan数据,利用scan match在最佳估计位置处插入子图(submap)中,且scan matching只跟当前submap有关。在生成一个submap后,会进行一次局部的回环(loop close),利用分支定位和预先计算的网格,所有submap完成后,会进行全局的回环。
相关文章:
SLAM算法之HectorSLAM,Gmapping,KartoSLAM,CoreSLAM和LagoSLAM
文章将介绍使用的基于机器人操作系统(ROS)框架工作的SLAM算法。 在ROS中提供的五种基于2D激光的SLAM算法分别是:HectorSLAM,Gmapping,KartoSLAM,CoreSLAM和LagoSLAM。当然最后还有比较经典的google开源的ca…...
phpstorm断点调试
环境:win10phpstorm2022phpstudy8lnmp 1、phpinfo(); 查看是否安装xdebug,没有走以下流程 2、phpstudy中切换不同版本php版本,有些版本不支持xdebug(如php8.0.2),有些已经自带了(如php7.3.9&a…...
做一个前端网页送给女朋友~轮播图+纪念日
文章目录1. 轮播图框架2. 轮播图大盒子实现1. 盒子及图片的可视化2. 将图片重叠起来并放入轮播图盒子中...相对定位与绝对定位3. 添加左右按钮4. 点击按钮跳转图片5. 鼠标离开图片轮播图按钮隐藏6. 添加小圆点按钮7. 点击小圆点跳转图片并且该小圆点变色8. 自动轮播9. 最后一步…...

CSDN 编程竞赛三十九期题解
竞赛总览 CSDN 编程竞赛三十九期:比赛详情 (csdn.net) 竞赛题解 题目1、圆小艺 最近小艺酱渐渐变成了一个圆滑的形状球,小艺酱开始变得喜欢上球!小艺酱得到n个同心圆。小艺酱对着n个同心圆进行染色,相邻的圆范围内不能有相同的…...
ChatGPT来了你慌了吗?
文章目录一、ChatGPT是什么?一、ChatGPT到底多强大?三、各平台集成了ChatGPT插件:四、ChatGPT能否取代程序员?一、ChatGPT是什么? ChatGPT(全名:Chat Generative Pre-trained Transformer&…...
Dijkstra 算法
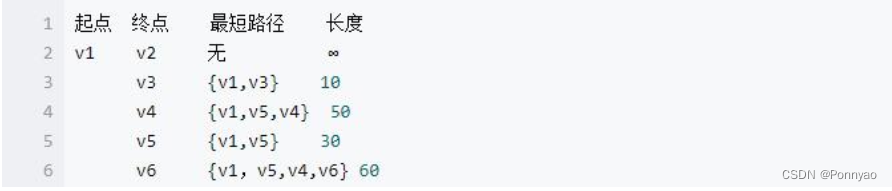
Dijkstra 算法( 迪杰斯特拉算法), 又叫最短路径算法, 这是常见的图论中的最短路径算法, 由 Edsger W.Dijkstra 在 1959 年发表。 这种算法能够给定一个图中的源节点( Source Node), …...

EIgamal 算法实现与解读
EIgamal 算法实现与解读 数学知识1.求原根2.求逆元快速幂求解EIgamal 算法1. Elgamal密钥产生2. Elgamal加密3. Elgamal解密效果如下:数学知识 1.求原根 如果g是p的原根,就是g^(p-1) = 1 (mod P)当且仅当指数为p-1的时候成立.(这里P是素数) 简单来说,g^i mod p ≠ g^j m…...
静态通讯录动态通讯录制作详解
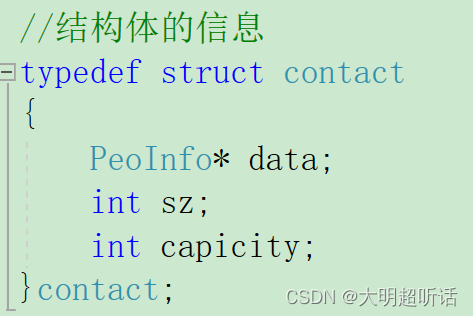
🍕在本期的博客我们来向大家介绍一下静态通讯录的书写以及怎样将我们的静态通讯录更改为动态的模式。 🍔静态通讯录的创建 🍕就像是我们之前进行的完整程序逻辑的书写一样我们同样创建三个文件,两个 .c 文件,一个 .h 文…...
2023最新最详细【接口测试总结】
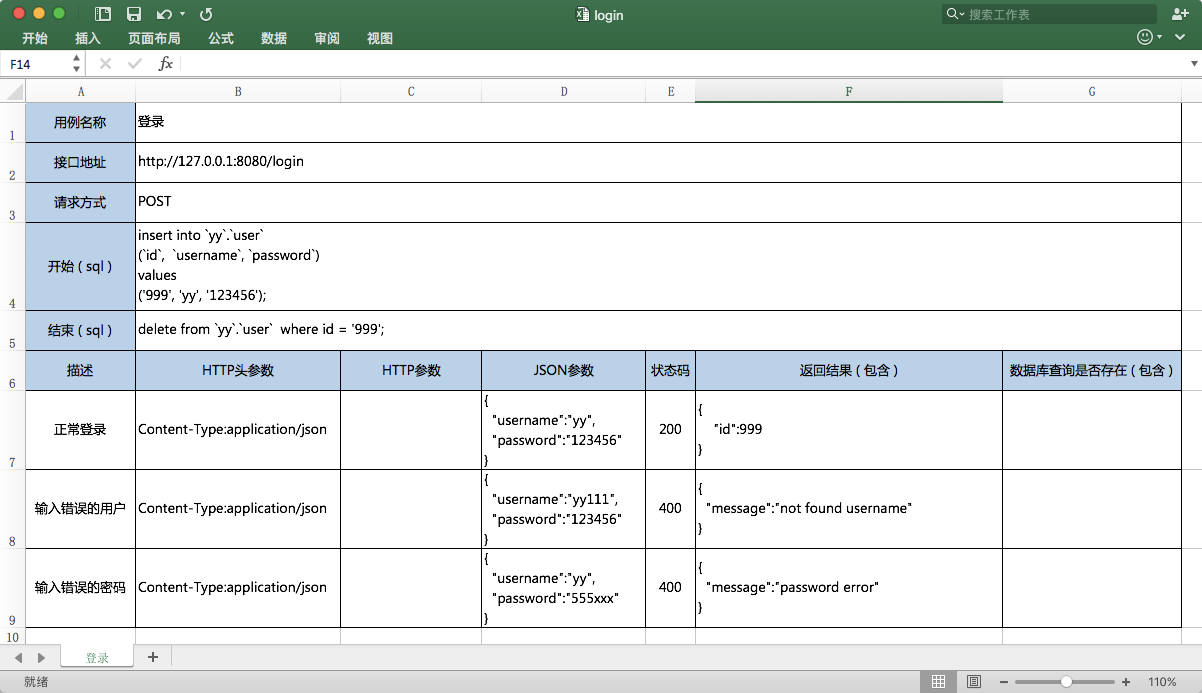
序章 说起接口测试,网上有很多例子,但是当初做为新手的我来说,看了不不知道他们说的什么,觉得接口测试,好高大上。认为学会了接口测试就能屌丝逆袭,走上人生巅峰,迎娶白富美。因此学了点开发…...
【java基础】Stream流的各种操作
文章目录基本介绍流的创建流的各种常见操作forEach方法filter方法map方法peek方法flatMap方法limit和skip方法distinct方法sorted方法收集结果收集为数组(toArray)收集为集合(collect)收集为Map关于流的一些说明(终结操…...

【Python练习】序列结构
目录 一、实验目标 二、实验内容...

CDN加速缓存的定义与作用
一、CDN的含义CDN的全称是Content Delivery Network,即内容分发网络。CDN是在原有互联网的基础上再构建虚拟分发网络,利用部署在各地的边缘节点服务器,充分发挥其负载均衡、内容分发智能调度等功能,让用户能够就地拉取数据&#x…...
Java并发高频面试题
分享50道Java并发高频面试题。 线程池 线程池:一个管理线程的池子。 为什么平时都是使用线程池创建线程,直接new一个线程不好吗? 嗯,手动创建线程有两个缺点 不受控风险频繁创建开销大 为什么不受控? 系统资源有…...
CVPR 2023 | 旷视研究院入选论文亮点解读
近日,CVPR 2023 论文接收结果出炉。近年来,CVPR 的投稿数量持续增加,今年收到有效投稿 9155 篇,和 CVPR 2022 相比增加 12%,创历史新高。最终,大会收录论文 2360 篇,接收率为 25.78 %。本次&…...
)
Vue3 学习总结补充(一)
文章目录1、Vue3中为什么修改变量的值后,视图不更新?2、使用 ref 还是 reactive?3、reactive 为什么会有响应性连接丢失情况?4、watch的不同使用方法5、watchEffect和 watch 的区别区别1:数据源的区别区别2:…...

使用ChatGPT 开放的 API 接口可以开发哪些自研工具?
使用ChatGPT开放的API接口,可以开发多种自研工具,例如: 智能聊天机器人:可以使用ChatGPT提供的语言生成能力,构建一个智能聊天机器人,能够根据用户的输入自动回复,完成自然语言交互。 文本生成工具:可以使用ChatGPT的文本生成能力,开发一个文本生成工具,例如自动生…...
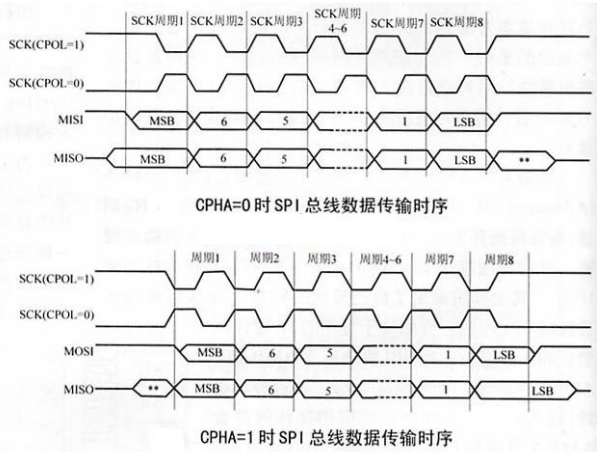
I2C和SPI总线以及通信
通讯属性 概括 Serial/parallel 串行/并行Synchronous/asynchronous 同步/异步Point-to-point / bus 点对点 总线Half-duplex/full-duplex 半双工/全双工Master-slave/ equal partners 主从/对等single-ending / differential 单端/差分 点对点和总线 点对点通讯 只有两个通…...

Spring八股文
Bean的生命周期 1.通过反射生成对象 2.填充Bean的属性 3.调用aware接口的invokeAwareMethod方法,对BeanName、BeanFactory、BeanClassLoader对象的属性设值 4.调用BeanPostProcessor的前置处理方法,其中使用较多的是ApplicationContextPostProcessor…...

20 k8sMetric 简介
一. Metric 简介metrics-server 可实现 Kubernetes 的 Resource Metrics API(metrics.k8s.io),通过此 API 可以查询 Pod 与 Node 的部分监控指标,Pod 的监控指标用于 HPA、VPA 与 kubectl top pods -n ns 命令,而 Node…...
面试问了解Linux内存管理吗?10张图给你安排的明明白白
linux内存管理,内存管理好像离我们很远,但这个知识点虽然冷门(估计很多人学完根本就没机会用上)但绝对是基础中的基础,这就像武侠中的内功修炼,学完之后看不到立竿见影的效果,但对你日后的开发工…...

Perplexity反义词≠低困惑度?——斯坦福NLP实验室内部培训材料首次公开的4层认知陷阱
更多请点击: https://kaifayun.com 第一章:Perplexity反义词≠低困惑度?——认知错位的根源剖析 Perplexity(困惑度)是语言模型评估中被广泛误读的核心指标。许多人直觉认为“低困惑度即好模型”,甚至将“…...

大学生几种职业资格证书有哪些?2026年高含金量考证指南与就业规划
你好呀!👋 看到你在这个时间点搜索关于证书的话题,我完全能理解你的心情。转眼间我们已经步入 2026年,当下的就业环境比起几年前,确实发生了不少变化。我也接触过很多像你一样的同学,大家都有点焦虑&#x…...

讲讲IO复用三个函数的底层逻辑
在 Linux 网络编程中,IO 复用是高并发服务的核心基石。我们熟知的 Nginx、Redis、日志服务、后端网关,全部都是基于 IO 复用实现高并发。很多同学只会用 select / poll / epoll 这三个函数,但完全不懂内核底层到底发生了什么,遇到…...

如何快速搭建个人游戏串流服务器:Sunshine跨平台游戏流媒体完整指南
如何快速搭建个人游戏串流服务器:Sunshine跨平台游戏流媒体完整指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 想要在任何设备上畅玩PC游戏?Sunshine游…...

使用curl命令直接调试taotoken大模型api接口的详细方法
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用curl命令直接调试Taotoken大模型API接口的详细方法 对于需要在无SDK环境下进行底层调试、自动化脚本编写或快速验证接口的开发…...

从“能听见”到“听得清”:一款高集成度AI语音处理模组的落地实践
在嵌入式产品开发中,语音交互功能的开发往往是一个“隐形的坑”。很多团队在Demo阶段用普通麦克风和喇叭一切正常,一到真实环境就问题百出:空调噪音盖过人声、对方听到刺耳的回声、音量开大就爆麦。一、产品定位:解决什么痛点&…...

AlwaysOnTop终极指南:如何让Windows窗口永远置顶的完整教程
AlwaysOnTop终极指南:如何让Windows窗口永远置顶的完整教程 【免费下载链接】AlwaysOnTop Make a Windows application always run on top 项目地址: https://gitcode.com/gh_mirrors/al/AlwaysOnTop 你是否曾经在同时处理多个任务时,因为重要窗口…...

Kemono-scraper完整指南:从批量下载到智能管理的艺术收藏工具
Kemono-scraper完整指南:从批量下载到智能管理的艺术收藏工具 【免费下载链接】Kemono-scraper Kemono-scraper - 一个简单的下载器,用于从kemono.su下载图片,提供了多种下载和过滤选项。 项目地址: https://gitcode.com/gh_mirrors/ke/Kem…...

Nginx缓慢HTTP攻击防护:从Slowloris原理到四层生产加固
1. 这不是误报:缓慢HTTP拒绝服务攻击的真实杀伤力与Nginx暴露面 “检测到目标主机可能存在缓慢的http拒绝服务攻击”——当安全扫描工具弹出这行提示时,很多运维同学的第一反应是点掉、忽略、加白名单。我见过三次真实事故:一次是电商大促前…...

深入解析Linux内核sk_buff:网络数据包的内存布局与核心操作
1. 项目概述:从“数据包”到“sk_buff”的认知跃迁在网络编程或者内核开发领域,无论你是刚入门的新手,还是已经写过几个驱动模块的开发者,迟早都会与一个名为sk_buff的数据结构狭路相逢。这个名字听起来有点古怪,它是“…...