调用yolov3模型进行目标检测
要调用已经训练好的YOLOv3模型对图片进行检测,需要完成以下几个步骤:
- 加载预训练模型:从预训练的权重文件中加载模型。
- 准备输入图片:将图片转换为模型所需的格式。
- 进行推理:使用模型对图片进行推理,得到检测结果。
- 处理输出结果:解析模型的输出,得到检测框、类别和置信度。
以下是一个使用PyTorch和OpenCV的示例代码,展示如何调用已经训练好的YOLOv3模型对图片进行检测:
1. 安装必要的库
确保已经安装了以下库:
pip install torch torchvision opencv-python
2. 加载预训练模型
假设已经有一个预训练的YOLOv3模型权重文件 yolov3.weights 和对应的配置文件 yolov3.cfg。
import torch
import cv2
import numpy as np# 加载预训练模型
model = cv2.dnn.readNetFromDarknet("yolov3.cfg", "yolov3.weights")
model.setPreferableBackend(cv2.dnn.DNN_BACKEND_OPENCV)
model.setPreferableTarget(cv2.dnn.DNN_TARGET_CPU)
3. 准备输入图片
读取图片并将其转换为模型所需的格式。
# 读取图片
image = cv2.imread("test.jpg")
blob = cv2.dnn.blobFromImage(image, 1/255.0, (416, 416), swapRB=True, crop=False)
model.setInput(blob)
4. 进行推理
使用模型对图片进行推理,得到检测结果。
# 获取输出层的名称
layer_names = model.getLayerNames()
output_layers = [layer_names[i[0] - 1] for i in model.getUnconnectedOutLayers()]# 进行推理
outputs = model.forward(output_layers)
5. 处理输出结果
解析模型的输出,得到检测框、类别和置信度,并绘制检测结果。
class_ids = []
confidences = []
boxes = []
conf_threshold = 0.5
nms_threshold = 0.4# 解析输出
for output in outputs:for detection in output:scores = detection[5:]class_id = np.argmax(scores)confidence = scores[class_id]if confidence > conf_threshold:center_x = int(detection[0] * image.shape[1])center_y = int(detection[1] * image.shape[0])width = int(detection[2] * image.shape[1])height = int(detection[3] * image.shape[0])left = int(center_x - width / 2)top = int(center_y - height / 2)class_ids.append(class_id)confidences.append(float(confidence))boxes.append([left, top, width, height])# 非极大值抑制
indices = cv2.dnn.NMSBoxes(boxes, confidences, conf_threshold, nms_threshold)# 绘制检测结果
for i in indices:i = i[0]box = boxes[i]left = box[0]top = box[1]width = box[2]height = box[3]cv2.rectangle(image, (left, top), (left + width, top + height), (0, 255, 0), 2)label = f"{class_ids[i]} {confidences[i]:.2f}"cv2.putText(image, label, (left, top - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)# 显示结果图片
cv2.imshow("Detection", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
相关文章:

调用yolov3模型进行目标检测
要调用已经训练好的YOLOv3模型对图片进行检测,需要完成以下几个步骤: 加载预训练模型:从预训练的权重文件中加载模型。准备输入图片:将图片转换为模型所需的格式。进行推理:使用模型对图片进行推理,得到检…...
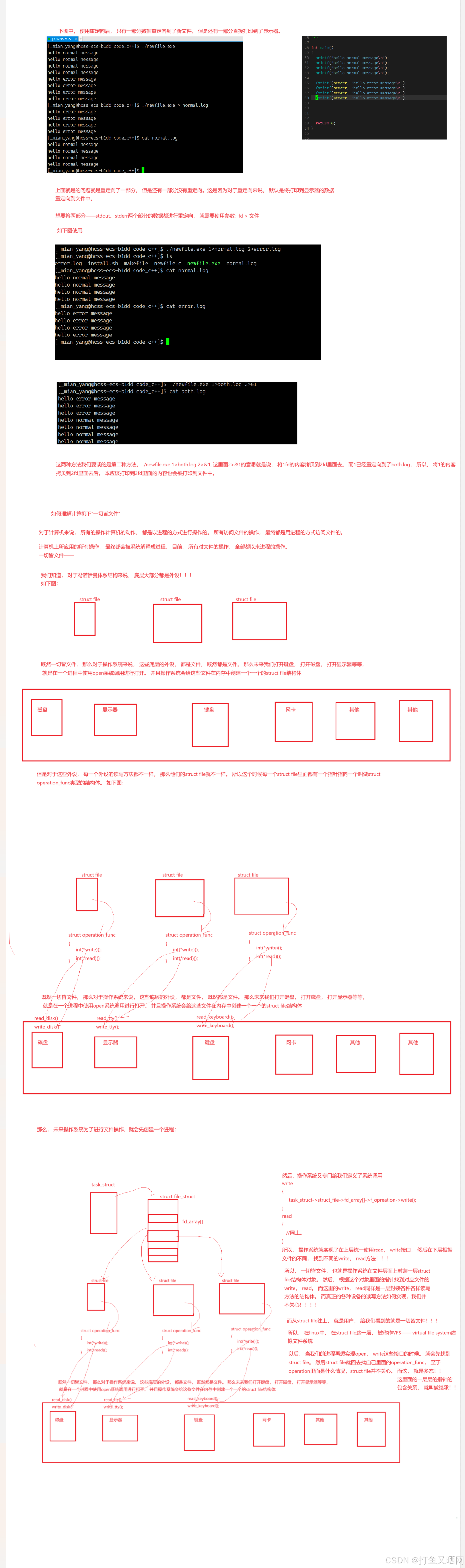
linux文件——重定向原理——dup、重定向与execl、VFS
前言:本篇讲解linux下的重定向相关内容。 在本篇中, 博主将会带着友友们一边实验, 一边探索底层原理。 通过本篇的学习, 友友们将会了解到重定向是如何实现的, 重定向的本质是什么, 重定向和进程替换之间的…...
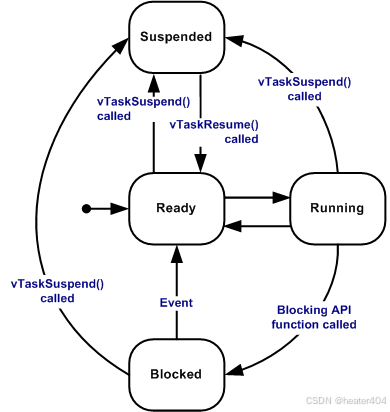
【STM32 FreeRTOS】任务
使用 RTOS 的实时应用程序可以被构建为一组独立的任务。每个任务在自己的上下文中执行,不依赖于系统内的其他任务或 RTOS 调度器本身。在任何时间点,应用程序中只能执行一个任务,实时 RTOS 调度器负责决定所要执行的任务。因此, R…...
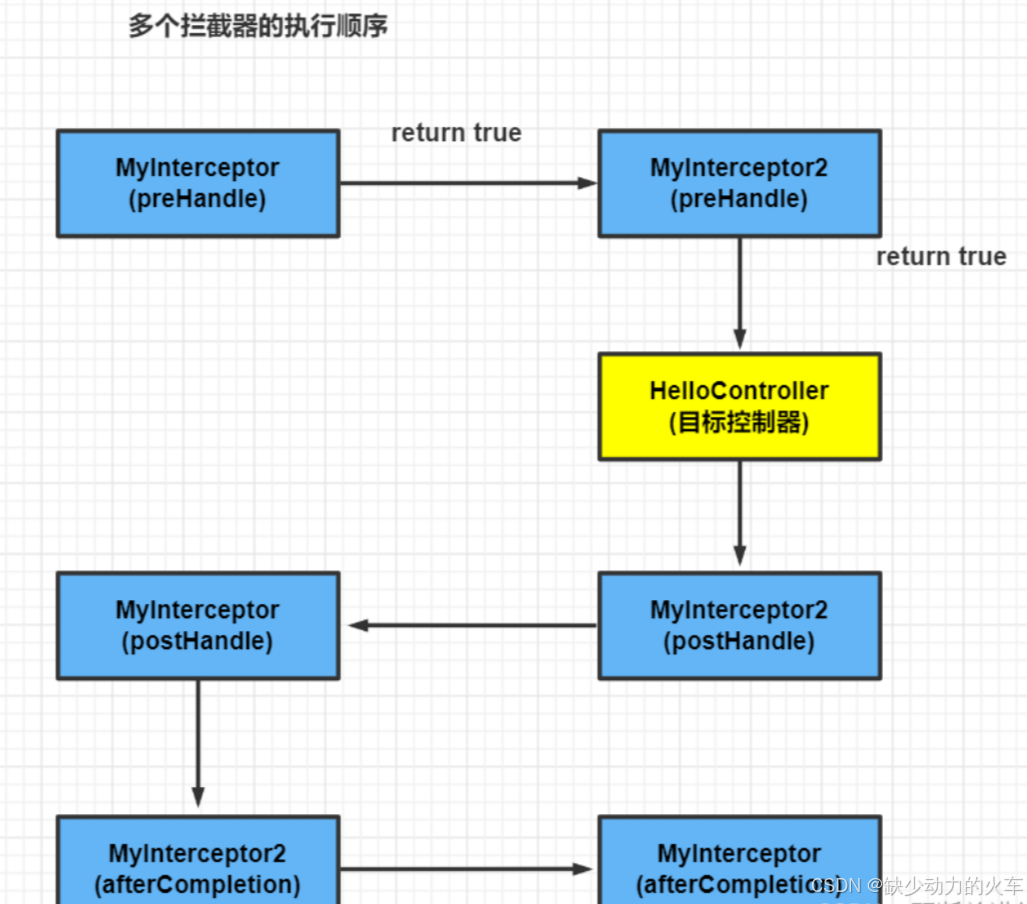
Java面试--框架--Spring MVC
Spring MVC 目录 Spring MVC1.spring mvc简介2.spring mvc实现原理2.1核心组件2.2工作流程 3.RESTful 风格4.Cookie,Session4.1 会话4.2 保存会话的两种技术 5.拦截器5.1过滤器、监听器、拦截器的对比5.2 过滤器的实现5.3 拦截器基本概念5.4 拦截器的实现 1.spring …...

土壤水分监测系统的工作原理
TH-TS200土壤水分监测系统是一种在地球科学、农学等领域广泛应用的分析仪器,它主要用于监测土壤中的水分含量,为农业生产、水资源管理、环境保护等提供重要数据支持。通常包括数据采集器、土壤水分传感器、土壤温度传感器(部分系统配备)、计算机软件以及…...

k8s学习--如何控制pod调度的位置
文章目录 一、Pod 调度基础二、通过节点选择器 (Node Selector) 控制调度三、使用节点亲和性 (Node Affinity)四、使用污点和容忍 (Taints and Tolerations)五、Pod 反亲和性 (Pod Anti-Affinity) 总结 在 Kubernetes (K8s)中,Pod 是应用运行的最小单位࿰…...
)
基于mysqldump的MySQL数据库异地备份方案(含完整脚本和解释)
MySQL数据库异地备份方案 0 文档描述 本文描述了一个数据库异地备份方案,以下脚本代码都是在线上应用的本文以CentOS7为例,其他系统请自行查询安装命令如果评论有需求,我就对应系统做一下文档 1 基本原理 1.1 流程 原理本身很简单&#…...

C语言中10个字符串函数详解
目录 1.strlen 2.strcpy 3.strcat 4.strcmp 5.strncpy 6.strncat 7.strncmp 8.strstr 9.strtok 10.strerror 1.strlen 基本结构:size_t strlen(const char *str);功能:用于计算字符串的长度;字符串已经 0作为结束标志…...

flume系列之:查询多个flume agent组是否有topic重复接入情况
flume系列之:查询多个flume agent组是否有topic重复接入情况 一、查询zk节点下的flume agent组二、获取采集的topic三、获取重复接入的topic,支持设置重复接入白名单四、执行流程五、完整代码一、查询zk节点下的flume agent组 def get_flumeAgent_zkPath(zkRootPaths):for z…...

Windows自动化1️⃣环境搭建WinAppDriver
对于技术选型: 我尝试了, pywinauto, WinAppDriver,CukeTest 担心CukeTest可能会收费, 尝试pywinauto,在元素点击,搜索时, 遇到不可用情况; WinAppDriver是微软家的,大厂开源, 就它了! 步骤一:安装WinAppDriver 进入WinAppDriver下载页面(https://githu…...

云服务器Docker内部署服务后,端口无法访问?
云服务器Docker内部署服务后,端口无法访问,可以按照以下思路进行排查: 以【docker run --name my-nginx -d -p 9395:80 nginx】举例: 查看Docker映射是否正确,可使用docker ps命令查看。Docker是否设置端口映射&#…...

Unity将摄像机视角保存成Json文件方便读取使用
系列文章目录 unity工具 文章目录 系列文章目录👉前言👉一、设置环境👉二、代码如下👉三、使用方法 👉四、下次外部调用json里面的摄像机位置的时候如下代码方法👉壁纸分享👉总结 👉…...
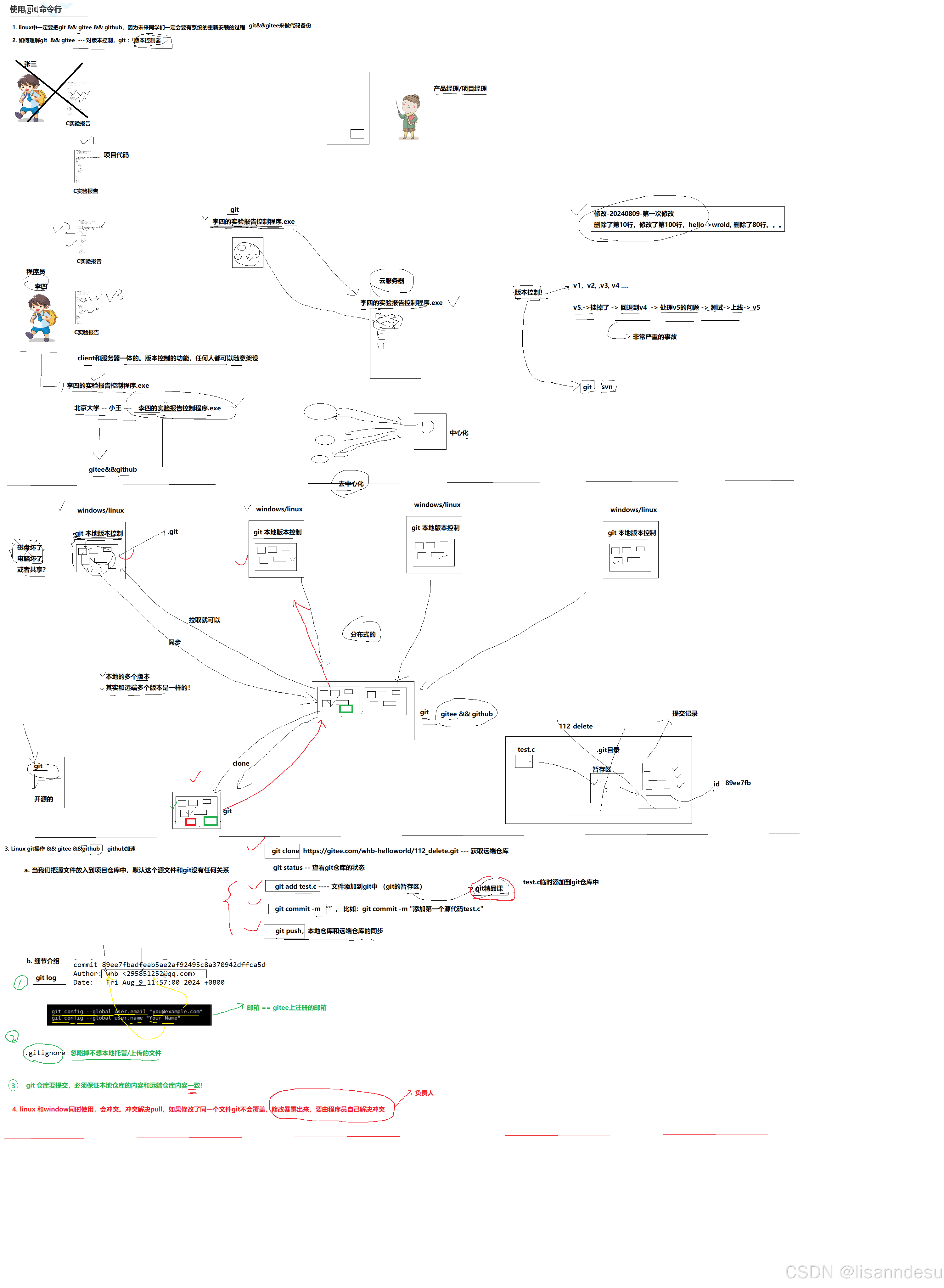
git是什么/基本指令
git作用 去中心化, 分布式版本控制器 新增术语:仓库区, 工作区, 暂存区 具体见下板书 常用git命令 git clone 仓库网址 git status 查看仓库状态 git add newfile 临时添加到git仓库 git commit -m 正式添加git仓库 g…...
Linux 中的同步机制
代码基于:Kernel 6.6 临界资源:指哪些在同一时刻只允许被一个线程访问的软件或硬件资源。这种资源的特点是,如果有线程正在使用,其他进程必须等待直到该线程释放资源。 临界区:指在每个线程中访问临界资源的那段代码。…...
Day17 枚举、typedef、位运算、堆空间的学习
目录 枚举 typedef 位运算 堆上的空间 枚举 一个一个列举出来,是指将变量的值一一列举出来,变量的值只限于列举出来的值的范围内。 作用: 1、为了提高代码的可读性 2、提高代码的安全性 枚举类型 基本语法: enum 枚举名 { …...
Python爬虫与数据分析:中国大学排名的深度挖掘
前言 👉 小编已经为大家准备好了完整的代码和完整的Python学习资料,朋友们如果需要可以扫描下方CSDN官方认证二维码或者点击链接免费领取【保证100%免费】 一、选题背景 高考作为中国学生生涯中最为重要的事,在高考之后,选择一所…...

微软开源库 Detours 详细介绍与使用实例分享
目录 1、Detours概述 2、Detours功能特性 3、Detours工作原理 4、Detours应用场景 5、Detours兼容性 6、Detours具体使用方法 7、Detours使用实例 - 使用Detours拦截系统库中的UnhandledExceptionFilter接口,实现对程序异常的拦截 C软件异常排查从入门到精通…...

js中的getElementById的使用方法
在JavaScript中,document.getElementById()是一种用于通过元素的id属性获取DOM元素的方法。它的作用是返回与指定id匹配的HTML元素。 使用document.getElementById()可以通过元素的id属性直接获取该元素的引用,然后可以使用该引用对元素进行各种操作。例…...

设计模式 - 桥接模式
💝💝💝首先,欢迎各位来到我的博客!本文深入理解设计模式原理、应用技巧、强调实战操作,提供代码示例和解决方案,适合有一定编程基础并希望提升设计能力的开发者,帮助读者快速掌握并灵活运用设计模式。 💝💝💝如有需要请大家订阅我的专栏【设计模式】哟!我会定…...

LeetCode530 二叉搜索树的最小绝对差
前言 题目: 530. 二叉搜索树的最小绝对差 文档: 代码随想录——二叉搜索树的最小绝对差 编程语言: C 解题状态: 成功解决! 思路 注意题目中的二叉搜索树,这个条件暗示每个节点的左子节点肯定小于该节点&am…...

5大突破:抖音音乐批量下载与智能管理解决方案
5大突破:抖音音乐批量下载与智能管理解决方案 【免费下载链接】douyin-downloader 项目地址: https://gitcode.com/GitHub_Trending/do/douyin-downloader 在数字内容创作与音乐收藏领域,高效获取和管理抖音平台的音频资源一直是用户面临的核心挑…...

League-Toolkit 英雄联盟工具集完整教程:从新手到高手的效率革命
League-Toolkit 英雄联盟工具集完整教程:从新手到高手的效率革命 【免费下载链接】League-Toolkit 兴趣使然的、简单易用的英雄联盟工具集。支持战绩查询、自动秒选等功能。基于 LCU API。 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在…...

南京四季旅游攻略:最美时节去最美地方
南京四季旅游攻略:最美时节去最美地方 🌸🍃🍂❄️本文作者:南京码农 发布日期:2026年3月26日 关键词:南京旅游、四季景点、旅游攻略、南京必去、季节推荐前言:南京,一座四…...

VOOHU 沃虎电子 千兆PoE+集成式RJ45连接器 SYT411Q199DB2A1DP 内置网络变压器 支持720mA供电 适用于PoE交换机与无线AP
苏州沃虎电子科技有限公司(品牌:VOOHU)供应的 SYT411Q199DB2A1DP 是一款高性能千兆集成式RJ45连接器,内置符合IEEE 802.3at标准的网络变压器,支持PoE(高达720mA)供电。该产品采用90侧插DIP封装&…...
)
CAD工程师必看:如何用De Boor算法优化B样条曲线设计(附NURBS对比)
CAD工程师必看:如何用De Boor算法优化B样条曲线设计(附NURBS对比) 在工业设计领域,曲线建模的精度与效率直接决定了产品从概念到成品的转化质量。作为CAD工程师,我们常常需要在设计自由度和计算效率之间寻找平衡点——…...

RDK X5上800万像素摄像头延迟从7秒降到200ms:我的5个月踩坑与优化实录
RDK X5高分辨率摄像头优化实战:从7秒延迟到200ms的性能飞跃 深夜的显示器前,我盯着屏幕上缓慢刷新的图像——32642448分辨率下,每按一次快门要等待7秒才能看到结果。作为一名在嵌入式视觉领域摸爬滚打多年的开发者,这种性能表现简…...

深入解析DW_I2C驱动中的中断处理机制:从FIFO到数据传输实战
深入解析DW_I2C驱动中的中断处理机制:从FIFO到数据传输实战 在嵌入式Linux开发中,I2C总线作为连接各类传感器的关键通道,其驱动性能直接影响系统响应速度和稳定性。DW_I2C(DesignWare I2C)作为业界广泛采用的IP核&…...

Spark--一文了解SparkSql的Join策略
文章目录前言一、join 基本要素二、join 实现三、五种join 策略3.1 2 种数据分发模式(数据怎么到同一个节点)3.1.1 Broadcast Join(广播 Join,也叫 Map Join)3.1.2 Shuffle Join(重分区 Join,也…...

【脚本篇】---vim下verilog-mode-v2的高效开发实践
1. 为什么选择vimverilog-mode-v2组合 第一次接触Verilog代码时,我用的是各种图形化IDE,直到有次在服务器上紧急修改代码才发现:原来vim配合verilog-mode插件可以这么高效。这个组合就像瑞士军刀里的主刀——看起来朴实无华,但能解…...

游戏资源解密工具:RPG Maker Decrypter零基础使用指南
游戏资源解密工具:RPG Maker Decrypter零基础使用指南 【免费下载链接】RPGMakerDecrypter Tool for extracting RPG Maker XP, VX and VX Ace encrypted archives. 项目地址: https://gitcode.com/gh_mirrors/rp/RPGMakerDecrypter RPG Maker Decrypter 是一…...