裸机条件下写一个基于时间片轮转的多任务并发程序
目录
- 前言
- A. 使用RTOS
- B.裸机多任务并发
前言
在学习各种MCU的时候,都是用在main函数里写一个while(1){/* 执行代码 */},这种方式只能一个函数运行完以后再运行另一个函数。
假设需求控制多个模块,如显示屏幕信息的同时控制电机,还要一边接收按键输入。如果用上面的方式每个模块要排队等待CPU运行,就会显的很卡。
那有没有办法每个模块运行固定的时间,时间到了运行下一个模块,这样单个模块即使特别耗时,也不影响其他模块的运行,这个方法叫时间片轮转。
想到这个办法很容易,但要怎么编写代码呢?
A. 使用RTOS
根据不要重复造轮子的理论,能用现有的开源代码当然是最好的了。如类STM32常用的操作系统有uCOS, RT-thread(国产),FreeRTOS。
用现成的去官网等地方搜移植教程,本文不再详述。
用这些开源代码的问题是如果MCU RAM或ROM太小,删减起来就不太方便了,这时候手搓一个多任务并发系统的作用来了。
B.裸机多任务并发
时间片轮转的基本思路就是通过定时器(最好是硬件定时器)将CPU的运行时间切片成一个个时间片,代码里叫tick,然后一个任务每运行一个时间片,tick计数加1,当前任务运行的tick数已经达到分配给任务的tick数,就不再执行当前任务执行下一个任务。
先定义一个最任务结构体,至少包括任务主体函数,分配给任务的时间片tick数和当前运行已经消耗的时间片tick计数。用结构体就是为了方便扩展用的,还可以增加参数比如任务使能,任务偏移量等。这样就使任务执行更加灵活。
typedef void (*Func)(void);
typedef struct task_info_t
{Func func; /* 任务主体函数 */uint16_t task_tick; /* 分配给任务的时间片tick数 */uint16_t tast_tick_cnt; /* 当前运行已经消耗的时间片tick计数 */
} TaskInfo_t;
初学者 typedef void (*Func)(void); 看不懂,这个是定义一种函数类型,这种函数类型是void (*)(void)型的,给他取个别名叫Func. 相当于下面这种写法:
不清楚的看这篇文章typedef void *(Func)(void)用法
typedef struct task_info_t
{void (*func)(void); /* 任务主体函数 */uint16_t task_tick; /* 分配给任务的时间片tick数 */uint16_t tast_tick_cnt; /* 当前运行已经消耗的时间片tick计数 */
} TaskInfo_t;
定义好结构体后创建一个结构体数组,在数组里初始化任务的参数,结构体数组不清楚的看这里结构体数组
TaskInfo_t TaskInfoArray[] = {{IdleTask, 10, 0},{LedTask, 20, 0},{KeyTask, 5, 0},{MotorTask, 50, 0},/*任务名 执行时间 运行计数*/
}
然后要开启一个定时器中断(我是STM32的用这种方法,其他单片机可以用其他方法),比如将时间片定为1ms. 用STM32CubeMX直接配置一个1ms中断的定时器,也可以去问ChatGPT。我这里是开了一个定时器TIM3.
/*** @brief TIM3 Initialization Function* @param None* @retval None*/
static void MX_TIM3_Init(void)
{TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};htim3.Instance = TIM3;htim3.Init.Prescaler = 850;htim3.Init.CounterMode = TIM_COUNTERMODE_UP;htim3.Init.Period = 65535;htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_OC_Init(&htim3) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_TOGGLE;sConfigOC.Pulse = 0;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_OC_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_3) != HAL_OK){Error_Handler();}HAL_TIM_MspPostInit(&htim3);
}
然后设置一个任务运行1ms的标志位,定义成全局变量 task1ms_Flag,定时器里把这个标志位至1.
/*** @brief This function handles TIM3 global interrupt.*/
uint8_t task1ms_Flag = 0;
void TIM3_IRQHandler(void)
{task1ms_Flag = 1;HAL_TIM_IRQHandler(&htim3);
}
然后在while(1){…}里面写整个任务切换的程序,看懂逻辑不复杂
/*** @brief The application entry point.* @retval int*/
int main(void)
{/*初始化代码*/uint8_t i;TaskInfo_t *p_task;while(1){if (0 == task1ms_Flag)return; //当前运行结束,1ms没到,不需要切换任务elsetask1ms_Flag = 0; //当task1ms_Flag为1时运行,先重置为0for (i = 0; i < sizeof(TaskInfoArray) / sizeof(TaskInfo_t); i++) //sizeof(TaskInfoArray) / sizeof(TaskInfo_t)为任务数,每1ms时间片轮转一遍{p_task = &TaskInfoArray[i]; //从任务0开始任务轮转if( p_task->task_tick_cnt >= tsk_ptr->tsk_tick ) //当前任务已经消耗tick大于分配的tick{tsk_ptr->func(); //执行当前任务i的函数主体tsk_ptr->tst_tick_cnt = tsk_ptr->tst_tick_cnt % tsk_ptr->tsk_tick; //当前任务已经消耗tick减去分配的tick,相当于清零。}else //如果当前任务已经消耗tick小于分配的tick,则当前任务已经消耗tick加一{tsk_ptr->tst_tick_cnt++; }}}
}
完成这些配置后就可以写每个任务的执行函数了,和RT-thread不一样,这些任务函数里不要写while(1)
void IdleTask(void)
{
}void LedTask(void)
{
}void KeyTask(void)
{
}void MotorTask(void)
{
}
整个系统的逻辑就是时间片轮转执行Task程序,如IdleTask执行10ms,LedTask执行20ms,KeyTask执行5ms,MotorTask执行50ms。
注意每个任务里如果要写延时函数注意延时的总时间不要大于分配的时间片。
相关文章:

裸机条件下写一个基于时间片轮转的多任务并发程序
目录前言A. 使用RTOSB.裸机多任务并发前言 在学习各种MCU的时候,都是用在main函数里写一个while(1){/* 执行代码 */},这种方式只能一个函数运行完以后再运行另一个函数。 假设需求控制多个模块,如显示屏幕信息的同时控制电机,还要…...

RK3588 系统定制开关机动画
平台:ITX-3588J, ROC-RK3588S-PC 系统:Android12.0 作者:jpchen & zzz 一. 功能描述 定制自己的开机动画和关机动画 二. 功能实现 1.开启功能 修改device/rockchip/common/BoardConfig.mk文件 BOOT_SHUTDOWN_ANIMATION_RINGINGtrue2.…...

水文-编程命令快查手册
前言 脑子里面记不住一些命令,每次遇到都得查下。我经常在三个实体电脑,windows/uos/ubuntu不同系统上编程。 所以web版本的笔记查看起来方便点。这里报错下。 二级标题 cmake windows在cmake --build的时候,使用–config,指定…...

如何优雅编写测试用例
当你学会了如何设计测试用例之后,接下来便是开始用例的编写。 在设计阶段,更准确的说应该是识别测试点的过程,而编写阶段则是将测试点细化成一条条测试用例的过程,有了比较全的用例场景后,如何让别人更舒服、更方便、…...
[入门必看]数据结构2.3:线性表的链式表示
[入门必看]数据结构2.3:线性表的链式表示第二章 线性表2.3 线性表的链式表示知识总览2.3.1 单链表的定义2.3.2_1 单链表的插入删除2.3.2_2 单链表的查找2.3.2_3 单链表的建立2.3.3 双链表2.3.4 循环链表2.3.5 静态链表2.3.6 顺序表和链表的比较2.3.1 单链表的定义单…...
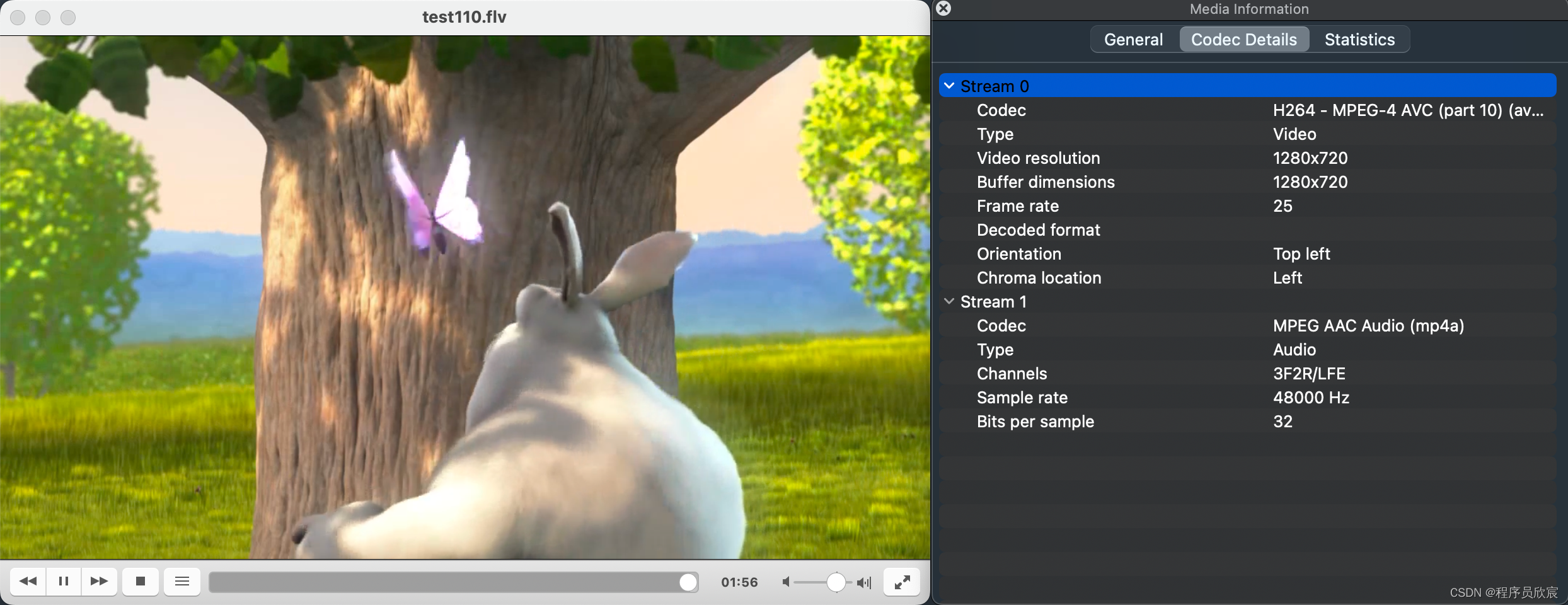
Golang流媒体实战之二:回源
欢迎访问我的GitHub 这里分类和汇总了欣宸的全部原创(含配套源码):https://github.com/zq2599/blog_demos 本篇概览 今天的实战是流传输过程中的常见功能:回源如下图,lal(源站)和lal(拉流节点)代表两台电脑,上面都部署了lalVLC在…...

webgl——给场景添加光
文章目录前言光照理论介绍光照效果光源类型反射光颜色向场景中添加光向场景中添加环境光和点光源逐片元光照——更加逼真总结前言 在之前的学习中已经将三维物体添加到了场景中,但是并没有在场景中使用光,照可以使模型更具有立体感,本文主要…...

Vue实战【Vue项目开发时常见的几个错误】
目录🌟前言🌟安装超时(install timeout)🌟can’t not find ‘xxModule’ - 找不到某些依赖或者模块🌟data functions should return an object🌟给组件内的原生控件添加事件,不生效了🌟我在函数内用了this.…...

【多线程】常见的锁策略
✨个人主页:bit me👇 ✨当前专栏:Java EE初阶👇 ✨每日一语:老当益壮,宁移白首之心;穷且益坚,不坠青云之志。 目 录🏳️一. 乐观锁 vs 悲观锁🏴二. 普通的互斥…...
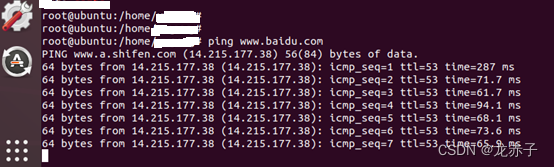
如何让虚拟机里的Ubuntu通过连接手机USB数据线上网
目录 一 前言 二 Windows联网方法 三 Ubuntu联网方法 一 前言 最近遇到了这样一个问题,有一台台式机,地插网口无法访问外网,周边也没有无线路由器,要访问外网,该如何做?进一步的,这台台式机…...
)
windows渗透(sam、system文件导出)
通过本地PC中渗透测试平台Kali对服务器场景Windows进行系统服务及版本扫描渗透测试,并将该操作显示结果中Telnet服务对应的端口号作为FLAG提交;通过本地PC中渗透测试平台Kali对服务器场景Windows进行系统服...
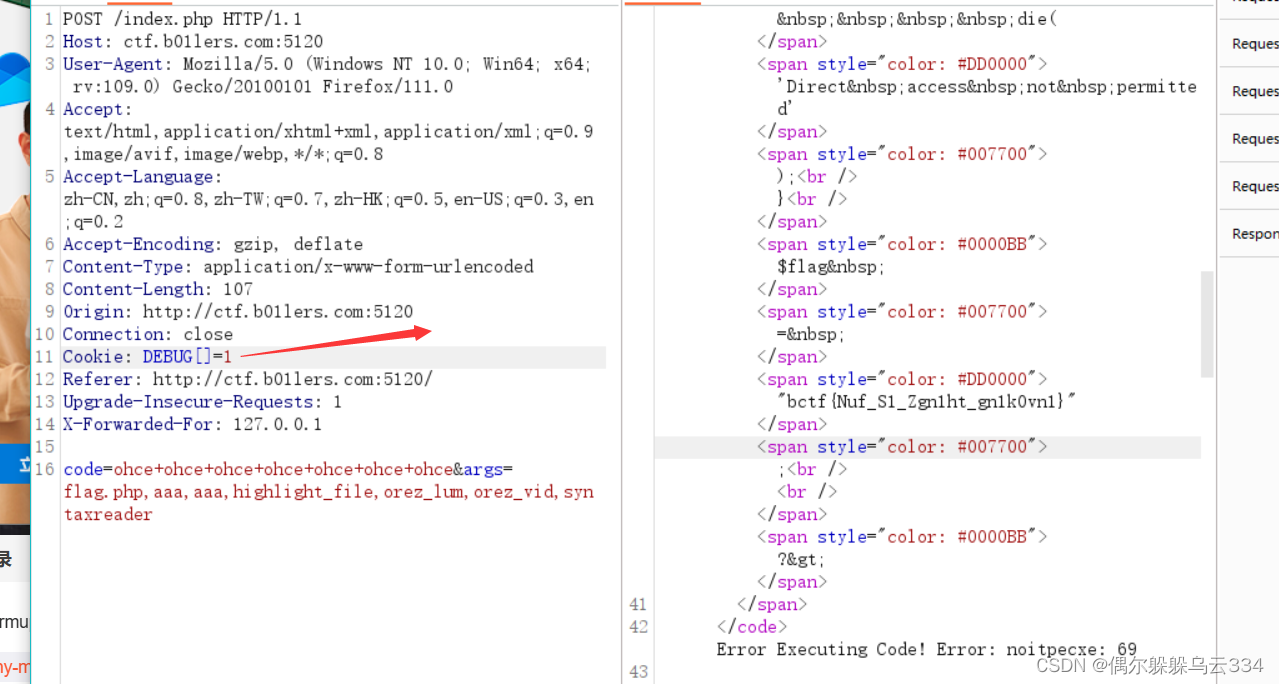
b01lers(php.galf)
目录 前文 正文 前文 <?phpclass A{public $codeNULL;public $argsNULL;public function __construct($code,$argsNULL){$this->code$code;$this->args$args;print_r("2333") ;} public function __invoke($code,$args){echo $code;print_r("执行inv…...
记一次若依后台管理系统渗透
前言 最近客户开始hw前的风险排查,让我们帮他做个渗透测试,只给一个单位名称。通过前期的信息收集,发现了这个站点: 没有验证码,再加上这个图标,吸引了我注意: 从弱口令开始 若依默认口令为ad…...
Mybatis(四):自定义映射resultMap
自定义映射resultMap前言一、处理字段和属性的映射关系问题:方案一:使用别名方案二:在mybatis-config.xml中设置mapUnderscoreToCamelCase方案三:在映射文件中设置redultMap二、多对一映射处理问题:方案一:…...
机器学习---降维算法
知其然知其所以然【写在前面】主成分分析(PCA)原理部分代码部分可视化部分线性判别分析(LDA)原理部分代码部分可视化部分独立成分分析(ICA)原理部分代码部分可视化部分t-SNE降维算法原理部分代码部分可视化…...

【Vue2从入门到精通】详解Vue.js的15种常用指令及其使用场景
文章目录前言1. v-text / {{ expression }}2.v-html3.v-bind4.v-on5. v-model6.v-for7.v-if / v-else-if / v-else9.v-show10.v-cloak11.v-pre12.组件注册指令13.动态组件指令14.自定义指令15.过滤器指令前言 Vue.js 是一款流行的前端框架,它通过指令(Di…...
数据库知识总结
数据库知识点总结个人向。 目录第一章 绪论第二章 关系数据库第三章 关系数据库标准语言SQL第四章 数据库安全性第五章 数据库完整性第六章 关系数据理论第七章 数据库设计第十章 数据库恢复技术第十一章 并发控制第一章 绪论 数据(data): 描述事物的符号记录。 数据库(DataB…...

处理数组循环中删除元素导致索引错位情况
就是很多时候我们对一个数组进行操作的时候,在for遍历的过程中删掉了一个元素,那么在删掉那个元素之后的所有元素的索引值都会减少一位,数组长度缩短一位,删完之后,正在进行的循环会继续循环下去,但是循环的…...
快速排序,分治法实际应用(含码源与解析)
🎊【数据结构与算法】专题正在持续更新中,各种数据结构的创建原理与运用✨,经典算法的解析✨都在这儿,欢迎大家前往订阅本专题,获取更多详细信息哦🎏🎏🎏 🪔本系列专栏 -…...
linux入门---操作体统的概念
什么是操作系统 操作系统是一个对软硬件资源进行管理的软件。计算机由一堆硬件组成,这些硬件遵循着冯诺依曼体系结构 在这个硬件的基础上还有一个软件叫做操作系统 操作系统的任务是对硬件进行管理,既然是管理的话操作系统得访问到底层的硬件…...

终极指南:如何3秒破解百度网盘提取码获取难题
终极指南:如何3秒破解百度网盘提取码获取难题 【免费下载链接】baidupankey 项目地址: https://gitcode.com/gh_mirrors/ba/baidupankey 还在为百度网盘分享链接的提取码而烦恼吗?每次找到心仪的学习资料、工作文件或娱乐资源,却卡在…...

真正的爱是接受对方本来的样子
武志红说:爱是如TA所是,而非如你所愿。真正的爱是接受对方本来的样子,而不是把对方改造成你想要的样子。爱是如TA所是意味着:你爱的是这个人本身,而不是你想象中的TA。你不需要改变对方来满足你的期望。你接受TA的优点…...
》控制范围(监控过程组)知识结构+10道真题)
软考高级《信息系统项目管理师教程(第4版)》控制范围(监控过程组)知识结构+10道真题
《信息系统项目管理师教程(第4版)》控制范围(监控过程组)知识结构+10道真题 一、控制范围 核心知识结构(第4版官方标准版) 1. 过程核心定义(必考,监控过程组重点) 控制范围属于范围管理、监控过程组,是范围管理的第六个过程,衔接确认范围与项目收尾,与实施整体变…...

STM32 SysTick配置详解:从原理到实践,打造精准系统时基
1. 项目概述:为什么SysTick配置是STM32开发的“心跳”起点在STM32的嵌入式开发世界里,SysTick定时器就像整个系统的心脏,它规律地跳动,为操作系统、延时函数、任务调度提供着最基础的时间基准。很多新手拿到开发板,跑完…...

像素风机甲对战小游戏HTML
先放效果图🎮 游戏玩法设计功能说明: 双人对战:两个玩家在同一键盘上对战 移动系统:左右移动 跳跃(带重力物理) 攻击系统: 近战攻击,有冷却时间和范围判定 防御系统:…...

企业微信外部群如何通过 API 自动化投递结构化小程序卡片
能力介绍 相比于传统的文字链接,结构化的小程序卡片拥有更高的点击率和更规范的视觉展现。该能力允许开发者通过主动调用 API,直接向指定的企业微信外部群投递原生小程序卡片。接口支持自定义动态配置小程序的 appid、首屏页面路径 pagepath(…...

VAE的隐空间为什么是‘连续’的?一个可视化实验带你理解它与普通自编码器的本质区别
VAE的隐空间连续性:可视化实验揭示生成能力的数学本质 当我们在二维平面上绘制一个螺旋线数据集时,传统自编码器(AE)会将其压缩成一团无序的点云,而变分自编码器(VAE)却能将其映射为一片连贯的星…...

Claude Mythos:AI自主攻防与零日漏洞发现的范式革命
1. 项目概述:一场静默却震耳欲聋的AI能力跃迁这周,整个AI安全圈没有爆炸性新闻稿,没有铺天盖地的发布会直播,只有一份措辞克制、数据密集的系统卡片(System Card)和一份由英国AI安全研究所(AISI…...
)
别再怪硬件了!DELL服务器风扇噪音的元凶与精准静音指南(iDRAC+IPMI实战)
别再怪硬件了!DELL服务器风扇噪音的元凶与精准静音指南(iDRACIPMI实战) 服务器风扇突然狂转,噪音飙升?先别急着给硬件判死刑。这背后往往是一场系统散热策略与硬件兼容性的无声对话。作为管理员,我们需要透…...

S7-1200通讯选型指南:RS485、Profinet还是开放式TCP?看完这篇不再纠结
S7-1200通讯选型指南:RS485、Profinet还是开放式TCP?看完这篇不再纠结 在工业自动化项目中,PLC通讯方案的选择往往让工程师们陷入两难——既要考虑当下设备的兼容性,又要为未来升级预留空间。作为西门子S7-1200系列PLC的用户&…...