项目实战:Qt+Opencv相机标定工具v1.3.0(支持打开摄像头、视频文件和网络地址,支持标定过程查看、删除和动态评价误差率,支持追加标定等等)
若该文为原创文章,转载请注明出处
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/141334834
长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…
Qt开发专栏:项目实战(点击传送门)
需求
1.打开摄像头,可设置帧率、分辨率(可设置);
2.可打开usb、rtsp和本地文件(直接输入地址自动判断);
3.opencv摄像头操作子线程处理;
4.支持设置棋盘格的行列角点数;
5.支持标定过程可控制;
6.采集标定图、可对标定图进行查看、删除;
7.可对已有的标定图查看评价像素误差率;
8.标定完成后,可以追加标定,继续开始基于原来的标定采集图继续标定;
9.支持定制配置文件的导出和导出(测试运行包不对外开放该功能);
相关博客
《OpenCV开发笔记(〇):使用mingw530_32编译openCV3.4.1源码,搭建Qt5.9.3的openCV开发环境》
《OpenCV开发笔记(三):OpenCV图像的概念和基本操作》
《OpenCV开发笔记(四):OpenCV图片和视频数据的读取与存储》
《OpenCV开发笔记(五):OpenCV读取与操作摄像头》
《OpenCV开发笔记(六):OpenCV基础数据结构、颜色转换函数和颜色空间》
《OpenCV开发笔记(七十六):相机标定(一):识别棋盘并绘制角点》
《OpenCV开发笔记(七十七):相机标定(二):通过棋盘标定计算相机内参矩阵矫正畸变摄像头图像》
Demo:calibrateTool_v1.3.0 windows运行包
广角摄像头标定过程


鱼眼摄像头标定过程


动态标定过程:查看、删除和评价


CSDN粉丝0积分下载:https://download.csdn.net/download/qq21497936/89652658
QQ群:博客首页扫码进入QQ技术群,点击“文件”搜索“calibrateTool”,群内与博文同步更新)
模块化部署

关键源码
CalibrateManager.h
#ifndef CALIBRATEMANAGER_H
#define CALIBRATEMANAGER_H// opencv
#include "opencv/highgui.h"
#include "opencv/cxcore.h"
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
#include "opencv2/xphoto.hpp"
#include "opencv2/dnn/dnn.hpp"
// opencv_contrib
#include <opencv2/xphoto.hpp>
#include <opencv2/ximgproc.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/features2d.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <opencv2/xfeatures2d/nonfree.hpp>#include "cvui.h"
#include "calibrateCommon.h"
#include <QImage>
#include <QTimer>class CalibrateManager: public QObject
{Q_OBJECT
public:explicit CalibrateManager(QObject *parent = 0);~CalibrateManager();public slots:void testOpencvEnv(); // 测试环境public:double getBrightness() const; // 亮度double getContrast() const; // 对比度double getSaturation() const; // 饱和度double getHue() const; // 色调double getGain() const; // 增益double getExposure() const; // 曝光度bool getShowProperty() const; // 显示属性int getCalibrateRegionX() const; // 区域xint getCalibrateRegionY() const; // 区域yint getCalibrateRegionWidth() const; // 区域widthint getCalibrateRegionHeight() const; // 区域heightint getChessboardColCornerCount() const;// 棋盘行角点数量int getChessboardRowCornerCount() const;// 棋盘列角点数量QString getSerialize() const; // 获取序列化参数public:void setBrightness (double value); // 亮度void setContrast (double value); // 对比度void setSaturation (double value); // 饱和度void setHue (double value); // 色调void setGain (double value); // 增益void setExposure (double value); // 曝光度void setShowProperty(bool value); // 显示属性void setCalibrateRegionX(int x); // 区域xvoid setCalibrateRegionY(int y); // 区域yvoid setCalibrateRegionWidth(int width); // 区域widthvoid setCalibrateRegionHeight(int height); // 区域heightvoid setChessboardColCornerCount(int count);// 棋盘行角点数量void setChessboardRowCornerCount(int count);// 棋盘列角点数量bool setSerialize(QString str); // 获取序列化参数signals:void signal_opened(bool result); // 打开摄像头信号void signal_closed(); // 关闭摄像头信号void signal_captureOneFrame(cv::Mat mat); // 接收图像后抛出信号void signal_captureOneFrame(QImage image); // 接收图像后抛出信号void signal_captureOneResultFrame(cv::Mat mat); // 接收图像后抛出信号void signal_captureOneResultFrame(QImage image); // 接收图像后抛出信号void signal_startedCalibrate(bool result); // 开始标定结果void signal_regionChanged(int x, int y, int width, int height);void signal_fpsChanged(int fps); // 帧率void signal_stopedCalibrate(); // 结束标定结果(这是强制中断,不是标定完成)void signal_finishedCalibrate(); // 标定完成void signal_cameraInfo(CameraInfo cameraInfo); // 更新截图相机信息public slots:void slot_startCapture(int usb, int width = 0, int height = 0, int fps = 0);// 打开摄像头, 0...void slot_startCapture(QString url, int width = 0, int height = 0, int fps = 0);// 打开摄像头, 网络摄像头地址void slot_stopCapture(); // 当正在采集中时(>>时),关闭摄像头会导致程序崩溃,所以采集与停止放一个线程中(消息循环)void slot_startCalibrate(); // 开始标定void slot_addCalibrate(); // 继续标定void slot_snapshot(); // 快照void slot_deleteSnapshot(int index); // 删除快照void slot_stopCalibrate(); // 停止标定void slot_finishCalibrate(); // 完成标定public slots:void slot_start(); // 开启线程void slot_stop(); // 关闭线程protected slots:void slot_captrueFrame(); // 消息循环获取图像protected:void initControl();void updateCalibrateResult(); // 更新标定结果void calculateCalibrateErrors(); // 计算误差protected:bool findChessboard(int rowCornerCount, int colCornerCount, cv::Mat &mat, std::vector<cv::Point2f> &vectorPoint2fCorners);public:static QImage mat2Image(cv::Mat mat); // cv::Mat 转 QImageprivate:bool _running; // 线程是否运行private:cv::VideoCapture *_pVideoCapture; // 摄像头实例bool _showProperty; // 是否显示属性参数double _brightness; // 亮度double _contrast; // 对比度double _saturation; // 饱和度double _hue; // 色调double _gain; // 增益double _exposure; // 曝光度int _width; // 宽度int _height; // 高度int _fps; // 帧率bool _opened; // 摄像头是否打开bool _calibratingBefore; // 标定前一个变化状态bool _calibrating; // 正在标定bool _calibratFinished; // 校准完了(当前最近一个已经校准)int _calibrateRegionX; // 标定region区域像素起始x坐标int _calibrateRegionY; // 标定region区域像素起始y坐标int _calibrateRegionWidth; // 标定region区域像素宽度int _calibrateRegionHeight; // 标定region区域像素高度cv::Mat _mat; // 缓存一帧cv::Mat _resultMat; // 结果int _chessboardColCornerCount; // 一列多少个角点int _chessboardRowCornerCount; // 一行多少个角点std::vector<std::vector<cv::Point3f>> _vectorObjectPoint; // 缓存点std::vector<std::vector<cv::Point2f>> _vectorImagePoint;bool _snapshot; // 拍照private: // 计算内参和畸变系数cv::Mat _cameraMatrix; // 相机矩阵(接收输出)cv::Mat _distCoeffs; // 畸变系数(接收输出)std::vector<cv::Mat> _rotate; // 旋转量(接收输出)std::vector<cv::Mat> _translate; // 偏移量(接收输出)private:CameraInfo _cameraInfo;
};#endif // CALIBRATEMANAGER_HCalibrateManager.cpp
...
void CalibrateManager::slot_captrueFrame()
{if(!_running){return;}if(_pVideoCapture->isOpened()){*_pVideoCapture >> _mat;if(_showProperty){cv::putText(_mat, QString("brightness: %1").arg(_brightness).toStdString(),cvPoint(0, 30), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));cv::putText(_mat, QString(" contrast: %1").arg(_contrast ).toStdString(),cvPoint(0, 60), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));cv::putText(_mat, QString("saturation: %1").arg(_saturation).toStdString(),cvPoint(0, 90), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));cv::putText(_mat, QString(" hue: %1").arg(_hue ).toStdString(),cvPoint(0, 120), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));cv::putText(_mat, QString(" gain: %1").arg(_gain ).toStdString(),cvPoint(0, 150), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));cv::putText(_mat, QString(" exposure: %1").arg(_exposure ).toStdString(),cvPoint(0, 180), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));cv::putText(_mat, QString("press ESC out").toStdString(),cvPoint(0, 210), cv::FONT_HERSHEY_COMPLEX, 1.0, cv::Scalar(255));}// 第一次进入标定if(!_calibratingBefore && _calibrating){_calibrateRegionX = 0;_calibrateRegionY = 0;_calibrateRegionWidth = _width;_calibrateRegionHeight = _height;_calibratingBefore = true;emit signal_regionChanged(_calibrateRegionX, _calibrateRegionY, _calibrateRegionWidth, _calibrateRegionHeight);QImage srcImage = mat2Image(_mat);emit signal_captureOneResultFrame(srcImage);}else if(_calibrating){QImage srcImage = mat2Image(_mat);// 获取std::vector<cv::Point2f> imagePoints;if(findChessboard(_chessboardRowCornerCount,_chessboardColCornerCount,_mat,imagePoints)){// 这是拍照截图if(_snapshot){// 三维世界坐标系std::vector<cv::Point3f> objectPoints;for(int i = 0; i < _chessboardRowCornerCount; i++){for(int j = 0; j < _chessboardColCornerCount; j++){objectPoints.push_back(cv::Point3f(j, i, 0));}}// 图像识别出来的角点(一张图一组)_vectorObjectPoint.push_back(objectPoints);_vectorImagePoint.push_back(imagePoints);_snapshot = false;{SnapShot snapShot;snapShot.dateTime = QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss:zzz");snapShot.srcImage = srcImage;snapShot.drawChessboardImage = mat2Image(_mat);snapShot.imagePoints = imagePoints;snapShot.objectPoints = objectPoints;_cameraInfo.listSnapShot.append(snapShot);// 更新标定结果updateCalibrateResult();// 计算误差率calculateCalibrateErrors();// 抛出更新emit signal_cameraInfo(_cameraInfo);}}}
// if(_cameraInfo.listSnapShot.size() == 0)
// {
// QImage srcImage = mat2Image(_mat);
// emit signal_captureOneResultFrame(srcImage);
// }else{
// cv::undistort(_mat, _resultMat, _cameraMatrix, _distCoeffs);
// QImage image = mat2Image(_resultMat);
// emit signal_captureOneResultFrame(image);
// }}else if(_calibratFinished){
// if(_cameraInfo.listSnapShot.size() == 0)
// {
// QImage srcImage = mat2Image(_mat);
// emit signal_captureOneResultFrame(srcImage);
// }else{
// cv::undistort(_mat, _resultMat, _cameraMatrix, _distCoeffs);
// QImage image = mat2Image(_resultMat);
// emit signal_captureOneResultFrame(image);
// }}// 抛出原图QImage image = mat2Image(_mat);emit signal_captureOneFrame(image);// 抛出校正图if(_cameraMatrix.empty()){emit signal_captureOneResultFrame(image);}else{LOG;cv::undistort(_mat, _resultMat, _cameraMatrix, _distCoeffs);QImage dstImage = mat2Image(_resultMat);emit signal_captureOneResultFrame(dstImage);}QTimer::singleShot(5, this, SLOT(slot_captrueFrame()));}
}
...
入坑
算法的研究优化过程中,受到摄像头光学、标定板、标定板所占视口大小,图像处理过程原本的流程优化、标定过程中动态的处理等多方面因素,坑多暂时未记录。
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/141334834
相关文章:
项目实战:Qt+Opencv相机标定工具v1.3.0(支持打开摄像头、视频文件和网络地址,支持标定过程查看、删除和动态评价误差率,支持追加标定等等)
若该文为原创文章,转载请注明出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/141334834 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、Op…...
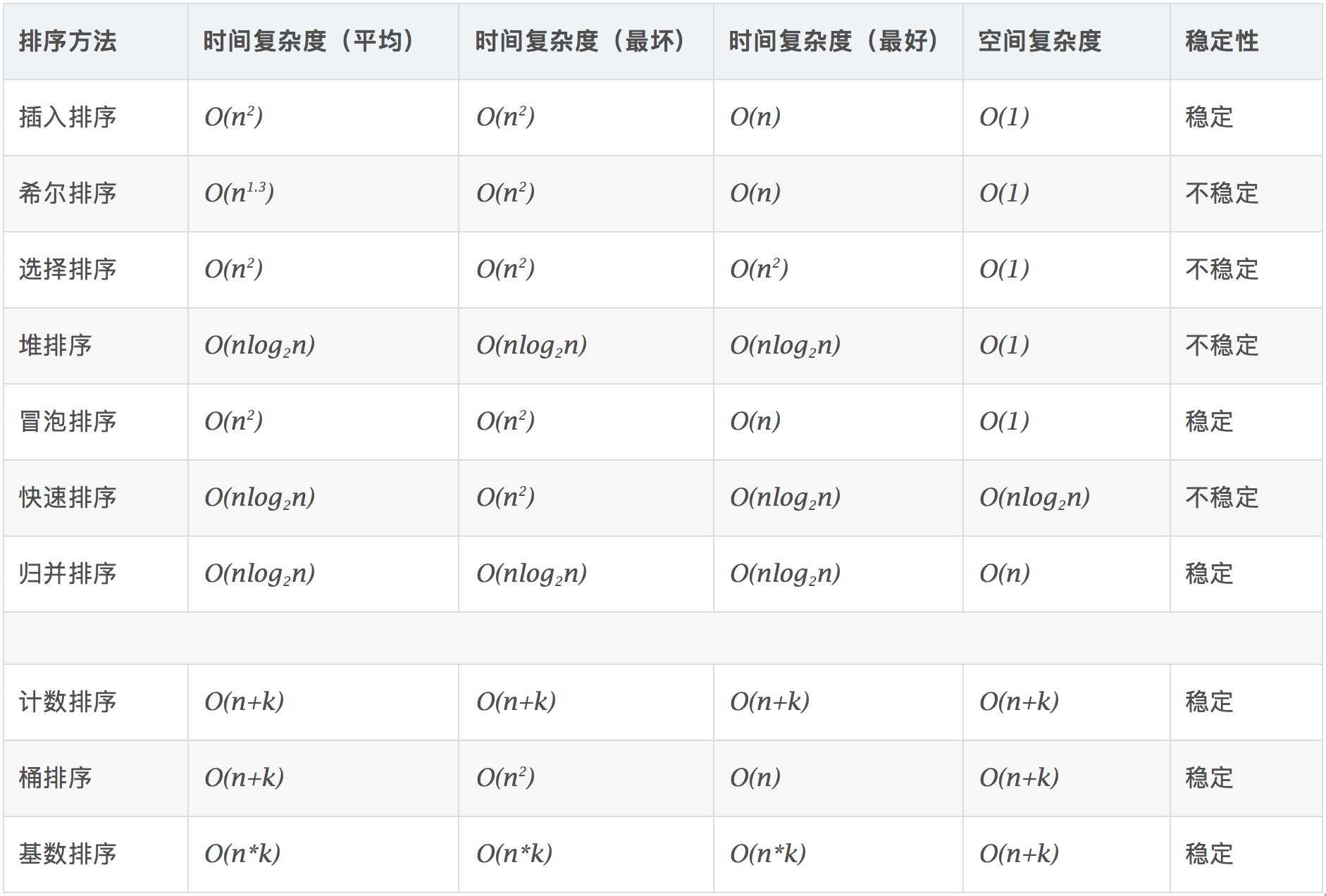
【数据结构】汇总八、排序算法
排序Sort 【注意】本章是 排序 的知识点汇总,全文1万多字,含有大量代码和图片,建议点赞收藏(doge.png)!! 【注意】在这一章,记录就是数据的意思。 排序可视化网站: D…...

Java-分割list并执行多线程任务的工具类
要创建一个用于分割列表并执行多线程任务的工具类,你可以使用 Java 的 ExecutorService 和 ThreadPoolExecutor 来实现。下面是一个详细的示例,展示了如何创建这样一个工具类。 步骤 1: 创建线程池 首先,创建一个线程池来执行任务。 步骤 2: 分割列表 接着,定义一个方…...

Springboot-从服务器获取一个输入流,转成视频文件存到oss
要在Spring Boot应用中从服务器获取一个输入流,然后将该流转换为视频文件并存储到阿里云 OSS中,你可以遵循以下步骤: 设置阿里云OSS客户端:首先,你需要配置阿里云OSS客户端,以便能够上传文件到OSS。 获取输入流:使用HTTP客户端(如RestTemplate或WebClient)从服务器…...
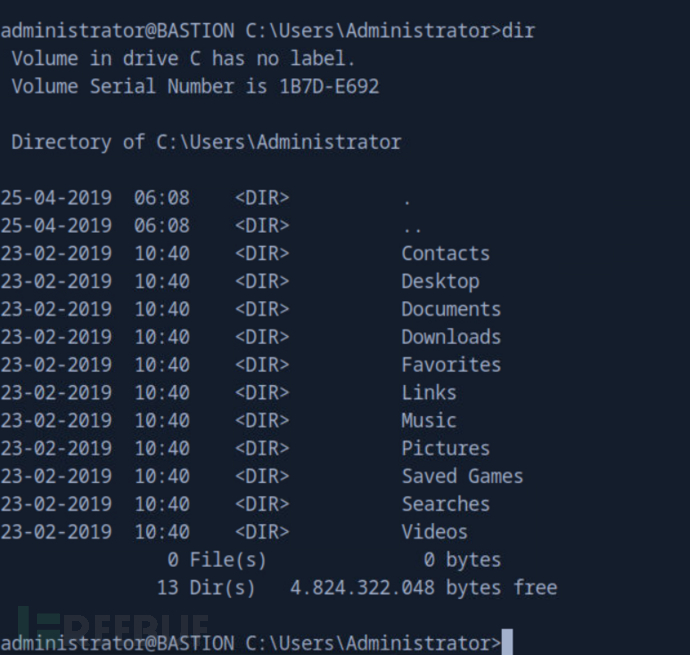
[Meachines] [Easy] Bastion SMB未授权访问+VHD虚拟硬盘挂载+注册表获取NTLM哈希+mRemoteNG远程管理工具权限提升
信息收集 IP AddressOpening Ports10.10.10.134TCP:22, 135, 139, 445, 5985, 47001, 49664, 49665, 49666, 49667, 49668, 49669, 49670 $ nmap -p- 10.10.10.134 --min-rate 1000 -sC -sV PORT STATE SERVICE VERSION 22/tcp open ssh OpenSSH fo…...

STM32标准库学习笔记-9.DMA 直接存储器存取
参考教程:【STM32入门教程-2023版 细致讲解 中文字幕】 DMA(Direct Memory Access) DMA(Direct Memory Access)直接存储器存取DMA可以提供外设和存储器或者存储器和存储器之间的高速数据传输,无须CPU干预…...

ubuntu VCS+verdi安装遇到的一些问题
主体流程:https://blog.51cto.com/u_15346322/4995147 我的是Ubuntu22.4 安装目录问题 执行 ./installer -gui 只能安装到home 或者 sudo ./setup.sh -install_as_root 能安装到/usr/ 目录 运行 vcs 出现 bin/sh: Illegal option -h sudo rm -f /bin/sh sudo…...

使用Poi-tl对word模板生成动态报告
一、pom依赖问题: <dependency> <groupId>com.deepoove</groupId> <artifactId>poi-tl</artifactId> <version>1.12.2</version> </dependency> 使用 poi-tl 的 1.12.2版本,如果使用了poi依赖&#x…...

day45-dynamic programming-part12-8.16
tasks for today: 1. 115.不同的子序列 2. 583.两个字符串选的删除操作 3. 72.编辑距离 4. 总结编辑两个序列关系的问题 ------------------------------------------------------------------- 1. 115.不同的子序列 In this practice, it is necessary to compare with t…...

C# String的方法
目录 #region 知识点九 字符串切割 #region 知识点一 字符串指定位置获取 #region 知识点二 字符串拼接 #region 知识点三 正向查找字符位置 #region 知识点四 反向查找指定字符串位置 #region 知识点五 移除指定位置后的字符 #region 知识点六 替换指定字符串 #region 知识点七…...

Oracle RAC vs Clusterware vs ASM
Oracle RAC vs Clusterware vs ASM Oracle RACCache FusionRAC后台进程自动负载管理DBA管理工具Oracle ClusterwareCRS组件HAS组件管理工具Oracle ASMASM实例ASM磁盘组镜像和故障组ASM磁盘ASM文件Oracle RAC RAC即Real Application Clusters,是一种Oracle高可用部署架构。Orac…...

“华为杯”第十五届中国研究生数学建模竞赛-F题:机场新增卫星厅对中转旅客影响的研究
目录 摘 要: 一、 问题重述 1.1 研究背景 1.2 已知信息 1.3 需要解决的问题 二、 模型假设 三、 符号说明 四、 问题一模型的建立与求解 4.1 问题描述与分析 4.2 模型的求解 4.3 求解结果与分析 五、 问题二模型的建立与求解 5.1 问题描述与分析 5.2 模型的求解 5.3 求解结果与…...

正点原子linux开发板 qt程序交叉编译执行
1.开发板光盘 A-基础资料->5、开发工具->1、交叉编译器->fsl-imx-x11-glibc-x86_64-meta-toolchain-qt5-cortexa7hf-neon-toolchain-4.1.15-2.1.0.sh 拷贝到 Ubuntu 虚拟机 用文件传输系统或者共享文件夹传输到linux虚拟机 用ls -l查看权限,如果是白色的使…...
聚星文社和虹猫哪个好
聚星文社和虹猫是两个不同的公司,各有各的特点。下面是它们各自的优点: 聚星文社:Docshttps://docs.qq.com/doc/DRU1vcUZlanBKR2xy 聚星文社是一家传媒公司,专注于出版漫画、动画、小说等内容,拥有丰富的IP资源和创作…...

三十八、【人工智能】【机器学习】【监督贝叶斯网络(Bayesian Networks)学习】- 算法模型
系列文章目录 第一章 【机器学习】初识机器学习 第二章 【机器学习】【监督学习】- 逻辑回归算法 (Logistic Regression) 第三章 【机器学习】【监督学习】- 支持向量机 (SVM) 第四章【机器学习】【监督学习】- K-近邻算法 (K-NN) 第五章【机器学习】【监督学习】- 决策树…...

[书生大模型实战营][L0][Task1] Linux 远程连接 InternStudio
[书生大模型实战营][Task1] Linux 远程连接 InterStudio 1. 申请 InterStudio 账号 https://studio.intern-ai.org.cn/console/dashboard 2. ssh 生成公匙与密匙 使用 ssh-gen 生成公匙与密匙 # 1. ssh-gen ssh-gen# 2. 查看生成的文件 ls ~/.ssh# 3. 打开生成的公匙&#…...
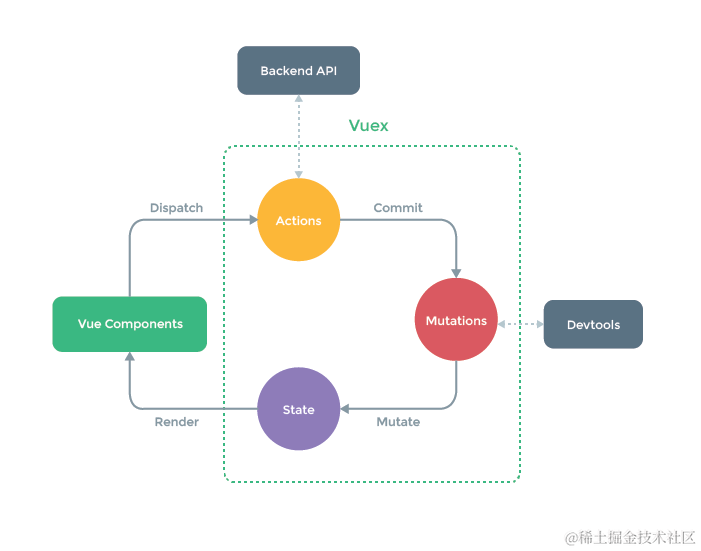
【vue教程】六. Vue 的状态管理
目录 往期列表本章涵盖知识点回顾Vuex 的基本概念什么是 Vuex?为什么需要 Vuex? Vuex 的核心概念stategettersmutationsactionsmodules Vuex 的安装和基本使用安装 Vuex创建 store在 Vue 应用中使用 store在组件中访问和修改状态 Vuex 的模块化模块化的好…...

无人机电子调速器详解!!!
电子调速器是无人机动力系统中的关键组件,主要负责将电池提供的直流电转换为交流电,并精确控制电机的转速,从而实现对无人机飞行状态的精确控制。以下是对无人机电子调速器的详细解析: 一、基本功能与原理 功能: 直…...
)
Clichouse数据导出导入(数据迁移)
背景:因为clickhouse数据持续增加,导致服务器磁盘不够使用,云服务器的系统盘不能扩容,所以只能进行迁移 连接clickhouse查看要迁移那些数据库 rootjcdata:~/buckup/clickhouse# clickhouse-client -udefault --password 123456…...
 源码剖析及使用)
Java基础——IService.class 中查询数据方法list() 源码剖析及使用
下面详细介绍Mybatis-plus 的默认服务IService.class 中的查询数据的方法及使用。 方法定义及其详细介绍 default List<T> list(Wrapper<T> queryWrapper) default List<T> list(Wrapper<T> queryWrapper) {return this.getBaseMapper().selectList(q…...

ai一键生成node.js环境配置教程,快马平台助你跳过繁琐安装步骤
最近在学习Node.js开发时,发现环境配置这个入门步骤对新手来说确实有点麻烦。不同操作系统下的安装方式差异大,版本选择也让人纠结。好在发现了InsCode(快马)平台的AI辅助开发功能,可以自动生成完整的配置教程,分享下我的使用体验…...

小白程序员必收藏!Agent工程入门指南:轻松上手大模型,抓住AI时代红利
小白程序员必收藏!Agent工程入门指南:轻松上手大模型,抓住AI时代红利 本文介绍了Agent工程的基础知识和大模型学习的核心逻辑,强调了从小白到掌握Agent和大模型的关键在于平衡AI的自主决策能力与流程规范。文章还提供了一份详细的…...

手把手教你:如何根据微软官方文档修改bat脚本,实现Excel文件格式的任意批量转换
从XLS到XLSX:基于微软官方文档的批处理脚本进阶指南 在数据处理工作中,Excel文件格式转换是常见的需求场景。许多用户可能只满足于使用现成的转换工具,但对于技术爱好者或需要频繁处理不同格式转换的专业人士来说,掌握如何根据微…...

多平台直链获取:突破网盘下载限制的开源解决方案
多平台直链获取:突破网盘下载限制的开源解决方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 …...

承美之话小程序开发概述
承美之话小程序开发概述承美之话小程序是一款基于微信生态的社交或服务类应用,可能涉及美学分享、艺术交流、生活美学等内容。开发此类小程序需结合微信官方开发规范与业务需求,以下为关键开发要点:核心功能模块用户系统 集成微信开放能力&am…...

智能架构革新黑苹果配置:OpCore Simplify的3大技术突破解析
智能架构革新黑苹果配置:OpCore Simplify的3大技术突破解析 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 在开源系统定制领域࿰…...

Windows环境下Dlib库安装完全指南:从报错到成功的实战手册
Windows环境下Dlib库安装完全指南:从报错到成功的实战手册 【免费下载链接】Dlib_Windows_Python3.x Dlib compiled binaries (.whl) for Python 3.7-3.14 and Windows x64 项目地址: https://gitcode.com/gh_mirrors/dl/Dlib_Windows_Python3.x 问题定位&am…...

AI驱动开发:在快马平台上让AI模型协作构建你的智能体框架
今天想和大家分享一个最近在InsCode(快马)平台上实践的AI辅助开发项目——构建一个用于代码审查的智能体框架。这个框架特别适合在快马这样的AI开发平台上实现,因为可以直接调用平台内置的多种AI模型来完成智能体之间的协作。 框架设计思路 整个智能体框架由三个核…...

Visual C++ Redistributable AIO架构师指南:从问题诊断到系统优化
Visual C Redistributable AIO架构师指南:从问题诊断到系统优化 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 一、问题溯源:运行库故障…...

大麦网抢票自动化:从技术原理到实战落地的全方位指南
大麦网抢票自动化:从技术原理到实战落地的全方位指南 【免费下载链接】DamaiHelper 大麦网演唱会演出抢票脚本。 项目地址: https://gitcode.com/gh_mirrors/dama/DamaiHelper 问题引入:抢票困境与技术破局 在热门演出票务竞争日益激烈的当下&am…...