PyTorch--残差网络(ResNet)在CIFAR-10数据集进行图像分类
完整代码
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms# Device configuration
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')# Hyper-parameters
num_epochs = 80
batch_size = 100
learning_rate = 0.001# Image preprocessing modules
transform = transforms.Compose([transforms.Pad(4),transforms.RandomHorizontalFlip(),transforms.RandomCrop(32),transforms.ToTensor()])# CIFAR-10 dataset
train_dataset = torchvision.datasets.CIFAR10(root='../../data/',train=True, transform=transform,download=True)test_dataset = torchvision.datasets.CIFAR10(root='../../data/',train=False, transform=transforms.ToTensor())# Data loader
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,batch_size=batch_size,shuffle=True)test_loader = torch.utils.data.DataLoader(dataset=test_dataset,batch_size=batch_size,shuffle=False)# 3x3 convolution
def conv3x3(in_channels, out_channels, stride=1):return nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)# Residual block
class ResidualBlock(nn.Module):def __init__(self, in_channels, out_channels, stride=1, downsample=None):super(ResidualBlock, self).__init__()self.conv1 = conv3x3(in_channels, out_channels, stride)self.bn1 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)self.conv2 = conv3x3(out_channels, out_channels)self.bn2 = nn.BatchNorm2d(out_channels)self.downsample = downsampledef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)if self.downsample:residual = self.downsample(x)out += residualout = self.relu(out)return out# ResNet
class ResNet(nn.Module):def __init__(self, block, layers, num_classes=10):super(ResNet, self).__init__()self.in_channels = 16self.conv = conv3x3(3, 16)self.bn = nn.BatchNorm2d(16)self.relu = nn.ReLU(inplace=True)self.layer1 = self.make_layer(block, 16, layers[0])self.layer2 = self.make_layer(block, 32, layers[1], 2)self.layer3 = self.make_layer(block, 64, layers[2], 2)self.avg_pool = nn.AvgPool2d(8)self.fc = nn.Linear(64, num_classes)def make_layer(self, block, out_channels, blocks, stride=1):downsample = Noneif (stride != 1) or (self.in_channels != out_channels):downsample = nn.Sequential(conv3x3(self.in_channels, out_channels, stride=stride),nn.BatchNorm2d(out_channels))layers = []layers.append(block(self.in_channels, out_channels, stride, downsample))self.in_channels = out_channelsfor i in range(1, blocks):layers.append(block(out_channels, out_channels))return nn.Sequential(*layers)def forward(self, x):out = self.conv(x)out = self.bn(out)out = self.relu(out)out = self.layer1(out)out = self.layer2(out)out = self.layer3(out)out = self.avg_pool(out)out = out.view(out.size(0), -1)out = self.fc(out)return outmodel = ResNet(ResidualBlock, [2, 2, 2]).to(device)# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)# For updating learning rate
def update_lr(optimizer, lr): for param_group in optimizer.param_groups:param_group['lr'] = lr# Train the model
total_step = len(train_loader)
curr_lr = learning_rate
for epoch in range(num_epochs):for i, (images, labels) in enumerate(train_loader):images = images.to(device)labels = labels.to(device)# Forward passoutputs = model(images)loss = criterion(outputs, labels)# Backward and optimizeoptimizer.zero_grad()loss.backward()optimizer.step()if (i+1) % 100 == 0:print ("Epoch [{}/{}], Step [{}/{}] Loss: {:.4f}".format(epoch+1, num_epochs, i+1, total_step, loss.item()))# Decay learning rateif (epoch+1) % 20 == 0:curr_lr /= 3update_lr(optimizer, curr_lr)# Test the model
model.eval()
with torch.no_grad():correct = 0total = 0for images, labels in test_loader:images = images.to(device)labels = labels.to(device)outputs = model(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()print('Accuracy of the model on the test images: {} %'.format(100 * correct / total))# Save the model checkpoint
torch.save(model.state_dict(), 'resnet.ckpt')
这段代码是一个PyTorch实现的残差网络(ResNet),用于在CIFAR-10数据集上进行图像分类任务。下面是代码的详细解析:
代码解析
导入必要的库
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
导入PyTorch及其神经网络模块、torchvision库用于处理图像数据。
设备配置
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
设置运行设备,优先使用GPU,如果没有GPU,则使用CPU。
超参数设置
num_epochs = 80
batch_size = 100
learning_rate = 0.001
设置训练轮数、批次大小和学习率。
数据预处理
transform = transforms.Compose([transforms.Pad(4),transforms.RandomHorizontalFlip(),transforms.RandomCrop(32),transforms.ToTensor()])
定义数据预处理步骤,包括填充、随机水平翻转、随机裁剪和转换为张量。
加载CIFAR-10数据集
train_dataset = torchvision.datasets.CIFAR10(root='../../data/', train=True, transform=transform, download=True)
test_dataset = torchvision.datasets.CIFAR10(root='../../data/', train=False, transform=transforms.ToTensor())
加载CIFAR-10训练集和测试集。
创建数据加载器
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=False)
创建用于加载数据的DataLoader。
定义3x3卷积函数
def conv3x3(in_channels, out_channels, stride=1):return nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)
定义一个3x3的卷积层。
定义残差块
class ResidualBlock(nn.Module):# ...
定义残差网络中的残差块,包含两个卷积层和批量归一化层。
定义ResNet模型
class ResNet(nn.Module):# ...
定义ResNet模型,使用残差块构建多个层。
实例化模型并移动到设备
model = ResNet(ResidualBlock, [2, 2, 2]).to(device)
创建ResNet模型实例并将其移动到配置的设备上。
定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
定义交叉熵损失函数和Adam优化器。
学习率衰减函数
def update_lr(optimizer, lr): for param_group in optimizer.param_groups:param_group['lr'] = lr
定义一个函数用于更新优化器的学习率。
训练模型
for epoch in range(num_epochs):# ...# 每20个epoch衰减学习率if (epoch+1) % 20 == 0:curr_lr /= 3update_lr(optimizer, curr_lr)
执行训练循环,包括前向传播、损失计算、反向传播和参数更新,并每20个epoch衰减学习率。
测试模型
model.eval()
with torch.no_grad():# ...
在测试阶段,设置模型为评估模式,并计算准确率。
保存模型
torch.save(model.state_dict(), 'resnet.ckpt')
保存模型的状态字典。
这段代码实现了一个标准的ResNet架构,用于CIFAR-10数据集的分类任务。代码中包含了数据预处理、模型定义、训练过程、测试评估和模型保存等关键步骤。
常见函数及其用法
以下是代码中使用的常见函数及其解析:
-
torch.device- 格式:
torch.device(device_str) - 参数:
device_str—— 设备类型字符串(如’cuda’或’cpu’)。 - 意义:确定模型和张量运行的设备。
- 用法示例:
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
- 格式:
-
torchvision.datasets.CIFAR10- 格式:
torchvision.datasets.CIFAR10(root, train, transform, download) - 参数:指定数据集的路径、是否为训练集、预处理变换、是否下载数据集。
- 意义:加载CIFAR-10数据集。
- 用法示例:
train_dataset = torchvision.datasets.CIFAR10(root='../../data/', train=True, transform=transform, download=True)
- 格式:
-
torch.utils.data.DataLoader- 格式:
torch.utils.data.DataLoader(dataset, batch_size, shuffle) - 参数:数据集对象、批次大小、是否打乱数据。
- 意义:创建数据加载器,用于批量加载数据。
- 用法示例:
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)
- 格式:
-
nn.Conv2d- 格式:
nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding) - 参数:输入通道数、输出通道数、卷积核大小、步长、填充。
- 意义:创建二维卷积层。
- 用法示例:
return nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)
- 格式:
-
nn.BatchNorm2d- 格式:
nn.BatchNorm2d(num_features) - 参数:特征数量。
- 意义:创建二维批量归一化层。
- 用法示例:
self.bn1 = nn.BatchNorm2d(out_channels)
- 格式:
-
nn.ReLU- 格式:
nn.ReLU(inplace=True/False) - 参数:是否使用内存原地(inplace)优化。
- 意义:创建ReLU激活层。
- 用法示例:
self.relu = nn.ReLU(inplace=True)
- 格式:
-
nn.Sequential- 格式:
nn.Sequential(*modules) - 参数:一个模块序列。
- 意义:按顺序应用多个模块。
- 用法示例:
downsample = nn.Sequential(conv3x3(self.in_channels, out_channels, stride=stride), nn.BatchNorm2d(out_channels))
- 格式:
-
nn.CrossEntropyLoss- 格式:
nn.CrossEntropyLoss() - 意义:创建交叉熵损失层,用于多分类问题。
- 用法示例:
criterion = nn.CrossEntropyLoss()
- 格式:
-
torch.optim.Adam- 格式:
torch.optim.Adam(params, lr) - 参数:模型参数、学习率。
- 意义:创建Adam优化器。
- 用法示例:
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
- 格式:
-
.to(device)- 格式:
.to(device) - 参数:设备对象。
- 意义:将模型或张量移动到指定设备。
- 用法示例:
images = images.to(device)
- 格式:
-
view- 格式:
view(size) - 参数:新的大小。
- 意义:重塑张量。
- 用法示例:
out = out.view(out.size(0), -1)
- 格式:
-
max- 格式:
max(dim, keepdim) - 参数:计算最大值的维度、是否保持维度。
- 意义:计算并返回张量在指定维度上的最大值和索引。
- 用法示例:
_, predicted = torch.max(outputs.data, 1)
- 格式:
-
no_grad- 格式:
torch.no_grad() - 意义:上下文管理器,用于禁用梯度计算。
- 用法示例:
with torch.no_grad():
- 格式:
-
sum- 格式:
sum(dim, keepdim) - 参数:求和的维度、是否保持维度。
- 意义:计算张量在指定维度的和。
- 用法示例:
correct += (predicted == labels).sum().item()
- 格式:
-
torch.save- 格式:
torch.save(obj, f) - 参数:要保存的对象、文件路径。
- 意义:保存对象到文件。
- 用法示例:
torch.save(model.state_dict(), 'resnet.ckpt')
- 格式:
这些函数和类是构建、训练和测试PyTorch模型的基础,涵盖了设备配置、数据加载、模型定义、训练过程、测试评估和模型保存等关键步骤。
运行过程
在整体进行一些可视化改进之后,可以看到效果图如下图所示:




相关文章:
PyTorch--残差网络(ResNet)在CIFAR-10数据集进行图像分类
完整代码 import torch import torch.nn as nn import torchvision import torchvision.transforms as transforms# Device configuration device torch.device(cuda if torch.cuda.is_available() else cpu)# Hyper-parameters num_epochs 80 batch_size 100 learning_rate…...
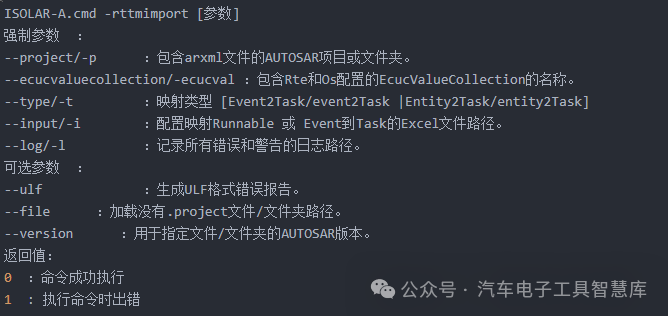
ETAS工具链自动化实战指南<一>
----自动化不仅是一种技术,更是一种思维方式,它将帮助我们在快节奏的工作环境中保持领先! 目录 往期推荐 场景一:SWC 之间 port自动连接 命令示例 参数说明 场景二:SWC与ECU 自动映射 命令示例 参数说明 场景三&…...

疫情期间我面试了13家企业软件测试岗位,一些面试题整理
项目的测试流程 拿到需求文档后,写测试用例 审核测试用例 等待开发包 部署测试环境 冒烟测试(网页架构图) 页面初始化测试(查看数据库中的数据内容和页面展示的内容是否一致,并且是否按照某些顺序排列)…...

PINCE——Linux 原生游戏内存修改器,一款替代 Cheat Engine 的强大游戏修改器,Linux 游戏玩家必备神器!
PINCE——Linux 原生游戏内存修改器,一款替代 Cheat Engine 的强大游戏修改器,Linux 游戏玩家必备神器! PINCE 是 GNU Project Debugger(GDB) 的前端/反向工程工具,常用作程序调试器,主要用于游戏领域,修改…...

为IntelliJ IDEA安装插件
安装插件 插件是开发工具的扩展程序,通常由第三方提供,当安装了插件后,原开发工作的菜单、按钮等开发环境可能会发生变化,例如出现了新的菜单项,或出现了新的按钮,甚至一些全新的编码方式,通常…...

ES6 Promise
ES6 Promise 对象 一、概述 是异步编程的一种解决方案。 从语法上说,Promise 是一个对象,从它可以获取异步操作的消息。 Promise 状态 状态的特点 Promise 异步操作有三种状态:pending(进行中)、fulfilled(…...

html+css 实现hover 凹陷按钮
前言:哈喽,大家好,今天给大家分享html+css 绚丽效果!并提供具体代码帮助大家深入理解,彻底掌握!创作不易,如果能帮助到大家或者给大家一些灵感和启发,欢迎收藏+关注哦 💕 目录 📚一、效果📚二、原理解析💡1.这是一个,hover时凹陷的效果。每个按钮是一个button…...

什么是负载均衡?负载均衡器如何运作?
往期文章 负载均衡器:LVS、Nginx、HAproxy如何选择? 目录 往期文章什么是负载均衡?为什么需要负载均衡?负载均衡工作原理?静态负载均衡算法动态负载均衡算法 参考 什么是负载均衡? 负载均衡是一种网络技术…...
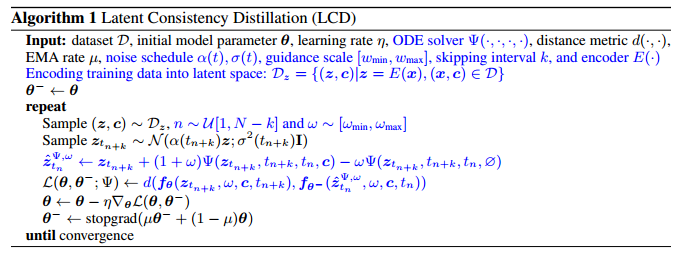
(Arxiv-2023)潜在一致性模型:通过少步推理合成高分辨率图像
潜在一致性模型:通过少步推理合成高分辨率图像 Paper Title: Latent Consistency Models: Synthesizing High-Resolution Images with Few-Step Inference Paper是清华发表在Arxiv 2023的工作 Paper地址 Code地址 ABSTRACT 潜在扩散模型 (LDM) 在合成高分辨率图像方…...

Unity与UE,哪种游戏引擎适合你?
PlayStation vs Xbox,Mario vs Sonic,Unreal vs Unity?无论是游戏主机、角色还是游戏引擎,人们总是热衷于捍卫他们在游戏行业中的偏爱。 专注于游戏引擎,Unity和Unreal Engine(简称UE4)是目前市…...

这五本大模型书籍,把大模型讲的非常详细,收藏我这一篇就够了
当然可以。在当前的大模型时代,随着自然语言处理(NLP)技术的迅速发展,出现了许多优秀的书籍来帮助读者理解这些复杂的技术。以下是几本值得推荐的大模型书籍,它们涵盖了从基础理论到高级实践的内容,可以帮助…...

伊朗通过 ChatGPT 试图影响美国大选, OpenAI 封禁多个账户|TodayAI
OpenAI 近日宣布,他们已经封禁了一系列与伊朗影响行动有关的 ChatGPT 账户,这些账户涉嫌利用该 AI 工具生成并传播与美国总统选举、以色列 – 哈马斯战争以及奥运会等相关的内容。 OpenAI 表示,这些账户与一个名为 “Storm-2035” 的秘密伊朗…...

windows系统如何走后面之windows系统隐藏账户
系统隐藏账户是一种最为简单有效的权限维持方式,其做法就是让攻击者创建一个新的具有管理员权限的隐藏账户,因为是隐藏账户,所以防守方是无法通过控制面板或命令行看到这个账户的。 自然我们需要一些前提条件,比如说有一个网站&am…...
(版本7.x)数据更新后刷新策略RefreshPolicy)
Elasticsearch(ES)(版本7.x)数据更新后刷新策略RefreshPolicy
Elasticsearch(ES)(版本7.x)数据更新后刷新策略RefreshPolicy 介绍 ES数据写入后,默认1s后才会被搜索到(refresh_interval为1); 这样可能是考虑到性能问题,毕竟实时IO 消耗较多资源 造成的问题 例如一个索引现在有…...

【运维】从一个git库迁移到另一个库
工作目录: /home/java/hosts 10.60.100.194 脚本 hosts / hostsShell GitLab (gbcom.com.cn) 核心代码...

and design vue表格列宽度拖拽,vue-draggable-resizable插件使用
and design vue2版的table表格不能拖拽列的宽度,通过vue-draggable-resizable插件实现 我用的是and design 1.7.8的版本,先下插件 yarn add vue-draggable-resizable2.1.0我这版本的and design用最新3.0.0以上的插件会有问题,实现不了效果&a…...

使用hexo搭建个人博客
很早之前使用hexo和github建了个人博客。搭建的流程一直没有梳理,中间换过几次机器,每次都得重新配置一遍,需要重新学些。最近电脑坏了,原始的数据没有导出来,先把以前文章写个文件占个位置,后面慢慢补吧&a…...

java geotool构建地理点线面
哈喽,各位小伙伴们,你们好呀,我是喵手。运营社区:C站/掘金/腾讯云/阿里云/华为云/51CTO;欢迎大家常来逛逛 今天我要给大家分享一些自己日常学习到的一些知识点,并以文字的形式跟大家一起交流,互…...

C# 中 Grpc服务端调用客户端方法
在 gRPC 中,服务端通常不直接调用客户端的方法,因为 gRPC 的设计模型是服务端提供服务,客户端调用服务。通常情况下,服务端和客户端之间是解耦的,服务端只提供服务端点,客户端通过这些端点发起请求。 不过…...

Arthas相关命令
官方网站:命令列表 | arthas 也可以用idea的插件arthas-idea的插件根据你想定位的代码生成命令 jvm 相关 dashboard - 当前系统的实时数据面板getstatic - 查看类的静态属性heapdump - dump java heap, 类似 jmap 命令的 heap dump 功能jvm - 查看当前 JVM 的信息l…...

多语言双轨直销系统开发要点
系统架构设计 采用微服务架构确保模块化与扩展性,支持高并发场景。数据库设计需考虑多语言数据存储,推荐使用NoSQL(如MongoDB)处理非结构化翻译内容。负载均衡技术保障全球用户访问速度。核心功能模块 会员管理模块实现双轨层级计…...
,大模型入门学习路线,非常详细看这一篇就够了!)
2026AI大模型入门学习教程(建议收藏),大模型入门学习路线,非常详细看这一篇就够了!
一、LLM Fundamentals 基础 1. 机器学习的数学基础 在掌握机器学习之前,理解支撑这些算法的基本数学概念非常重要。 线性代数:这是理解许多算法(特别是深度学习算法)的关键。主要概念包括向量、矩阵、行列式、特征值和特征向量、…...

如何让AI读懂古文?GuwenBERT带来的古典汉语处理革命
如何让AI读懂古文?GuwenBERT带来的古典汉语处理革命 【免费下载链接】guwenbert GuwenBERT: 古文预训练语言模型(古文BERT) A Pre-trained Language Model for Classical Chinese (Literary Chinese) 项目地址: https://gitcode.com/gh_mir…...

跨平台游戏模组下载终极指南:WorkshopDL免Steam资源获取工具
跨平台游戏模组下载终极指南:WorkshopDL免Steam资源获取工具 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你是否曾在Epic Games平台游玩《无主之地3》时…...

深入解析CyberpunkSaveEditor:赛博朋克2077存档编辑的终极指南
深入解析CyberpunkSaveEditor:赛博朋克2077存档编辑的终极指南 【免费下载链接】CyberpunkSaveEditor A tool to edit Cyberpunk 2077 sav.dat files 项目地址: https://gitcode.com/gh_mirrors/cy/CyberpunkSaveEditor 想要彻底掌控《赛博朋克2077》的游戏体…...

Phi-4-mini-reasoning部署教程:Nginx反向代理7860端口实现域名访问
Phi-4-mini-reasoning部署教程:Nginx反向代理7860端口实现域名访问 1. 项目介绍 Phi-4-mini-reasoning是微软推出的3.8B参数轻量级开源模型,专为数学推理、逻辑推导和多步解题等强逻辑任务设计。这款模型主打"小参数、强推理、长上下文、低延迟&q…...

29 openclaw内存管理优化:避免内存泄漏与过度消耗
背景/痛点在OpenCLaw项目的开发过程中,内存管理一直是性能优化的核心痛点。随着项目规模的扩大,内存泄漏和过度消耗问题逐渐凸显,导致系统性能下降甚至崩溃。OpenCLaw作为高性能计算框架,其内存管理机制直接影响计算效率和稳定性。…...

书匠策AI:论文写作界的“瑞士军刀”,期刊发表的秘密武器——从零到一,手把手教你用AI搞定期刊论文
在学术圈,期刊论文是科研成果的“通行证”,但写作过程却像一场“升级打怪”:选题没灵感、文献找不到、结构乱如麻、格式调崩溃……别怕!今天要介绍的书匠策AI(官网:www.shujiangce.com,微信公众…...

深圳SEO公司为什么要定期优化网站
深圳SEO公司为什么要定期优化网站 在当今数字化时代,拥有一个优秀的网站已经不再足以满足企业的需求。随着互联网市场的竞争日益激烈,深圳SEO公司认识到定期优化网站的重要性,并将其作为持续提升网站流量和业务发展的核心策略之一。为什么深…...

Qwen3-14B制造业工艺文档生成:设备操作SOP自动编写与版本管理
Qwen3-14B制造业工艺文档生成:设备操作SOP自动编写与版本管理 1. 引言:制造业文档自动化的迫切需求 在制造业生产现场,设备操作标准作业程序(SOP)是确保产品质量和生产安全的关键文档。传统SOP编写方式面临三大痛点: 人力成本高…...