gazebo下使用Fast-planner配置(包含mpc局部规划+控制Gazebo小车以及FastPlanner配置)
源码链接:
https://github.com/USE-jx/NMPC_CASADI_CPP?tab=readme-ov-file
#这是NMPC的 里面有Fast-Planner,但编译可能缺少东西,所以再放一个Fast-Planner的,可以装装缺少的库
https://github.com/HKUST-Aerial-Robotics/Fast-Planner #这是Fast-Planner的代码
简洁一下:第一个链接到代码是别人添加了模块的,包含自己搭建的Gazebo环境+小车,以及NMPC控制和局部规划。第二个项目是FastPlanner本身项目,第一个里也包含。
下面配置第一个:
sudo apt-get install ros-noetic-tf2-sensor-msgs
sudo apt-get install libarmadillo-dev
sudo apt-get install libarmadillo-dev ros-noetic-nlopt(这里不建议用ros的nlopt,使用C++源码编译的)
sudo apt-get install ros-noetic-openslam-gmapping
先删除mpc_tracking模块编译,不然显示确实bspline库,等Fast-planner编译完后在编译MPC模块
源码安装casadi求解器:
git clone https://github.com/casadi/casadi
安装必要的库: sudo apt-get install gcc g++ gfortran git cmake liblapack-dev pkg-config --install-recommends
cd casadi
mkdir build
cd build
cmake .. -DWITH_IPOPT=ON -DWITH_EXAMPLES=OFF
make -j4
sudo make install
make时候报错 没有makefile,发现上一步 cmake … -DWITH_IPOPT=ON -DWITH_EXAMPLES=OFF报错:
Could NOT find Ipopt (missing: Ipopt_DIR),于是其安装Ipopt
 安装后再次 cd build 执行cmake … -DWITH_IPOPT=ON -DWITH_EXAMPLES=OFF 若还有错,从上下载casadi的zip,再cd casadi
安装后再次 cd build 执行cmake … -DWITH_IPOPT=ON -DWITH_EXAMPLES=OFF 若还有错,从上下载casadi的zip,再cd casadi
- 解决EIGEN头文件报错:
在mpc_tracking的CmakeList.txt里添加 find_package(Eigen3 REQUIRED)
${EIGEN3_INCLUDE_DIRS} 注意大小写一致
- 显示找不到bspline报错
注意Fast-Planner里面文件夹结构,这两个文件夹里面才是ros的pkg,发现fast-planner里有bspline包,于是先单独编译bspline包,然后单独编译fast-planner里的每个包:因为依赖关系。总之:要在mpc_tracking包编译之前,把Fast-Planner里所有的包都编译了
- 编译bspine-opt包时,显示找不到nlopt路径,但之前sudo apt-get install libarmadillo-dev ros-noetic-nlopt(这里不建议用ros的nlopt,使用C++源码编译的)我下载了,不使用ROS自带的nlopt库 下载sudo apt-get install libnlopt-dev 后编译成功。
他还是显示找不到nlop.hpp,我直接在opt/ros/noetic/include/nlopt下,用全局路径写到cpp里
相关文章:
gazebo下使用Fast-planner配置(包含mpc局部规划+控制Gazebo小车以及FastPlanner配置)
源码链接: https://github.com/USE-jx/NMPC_CASADI_CPP?tabreadme-ov-file #这是NMPC的 里面有Fast-Planner,但编译可能缺少东西,所以再放一个Fast-Planner的,可以装装缺少的库 https://github.com/HKUST-Aerial-Robotics/Fast-P…...

Python核心编程--Python要点总结
Python 核心编程包括了一些关键的要点,理解这些要点对于掌握 Python 至关重要。以下是 Python 核心编程的一些要点: 1. 数据类型与数据结构 基本数据类型: int, float, str, bool容器类型: list, tuple, set, dict不可变类型与可变类型: tuple 是不可变…...

【mysql】mysql配置文件之优先级学习
本站以分享各种运维经验和运维所需要的技能为主 《python零基础入门》:python零基础入门学习 《python运维脚本》: python运维脚本实践 《shell》:shell学习 《terraform》持续更新中:terraform_Aws学习零基础入门到最佳实战 《k8…...
自然语言处理(NLP)大模型
自然语言处理(NLP)大模型 自然语言处理(NLP)领域中的一种重要技术,具有强大的语言理解和生成能力。以下是对NLP大模型的详细介绍: 一、定义与背景 NLP大模型是指通过大规模预训练和自监督学习技术构建的…...

融合创新趋势:Web3时代的跨界融合
随着互联网技术的飞速发展,Web3时代的到来正引领着一场深刻的技术与社会变革。Web3,作为下一代互联网技术的代表,不仅仅是一种技术创新,更是一种跨界融合的趋势。通过去中心化、智能合约和区块链技术的应用,Web3正在重…...

面临新时代的机遇与挑战,联想凌拓将如何破局?
近年来,IT行业的技术进步日新月异,云计算、大数据、人工智能……各种新兴技术犹如雨后春笋般层出不穷,并且正在给千行百业带来全面的变革甚至重塑。 然而以上提到的所有新兴技术,都离不开数据的存储与管理。那么作为中国乃至全球领…...

2024.8.21
作业: 运行1个服务器和2个客户端 实现效果: 服务器和2个客户端互相聊天,服务器和客户端都需要使用select模型去实现 服务器要监视2个客户端是否连接,2个客户端是否发来消息以及服务器自己的标准输入流 客户端要监视服务器是否发来…...

在Ubuntu16.04里安装ROS Kinetic
1.设置apt的source list sudo sh -c echo "deb http://packages.ros.org/ros/ubuntu$(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list 2.设置gpd keys sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365…...
后端开发刷题 | 合并两个排序的链表
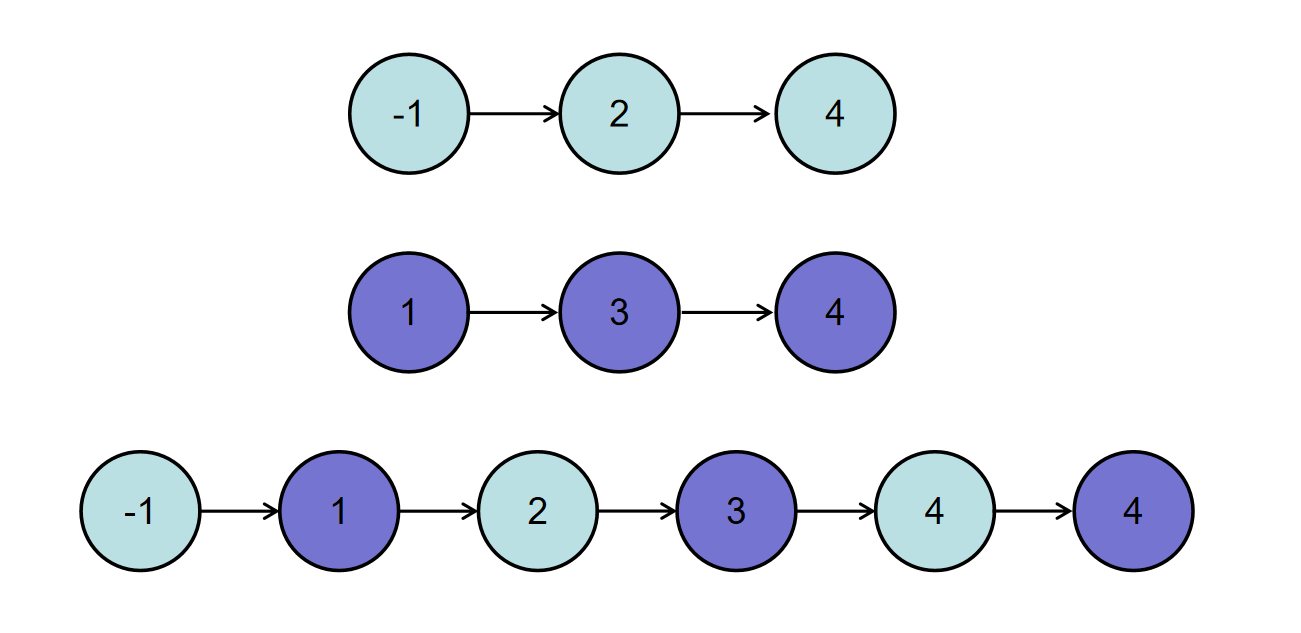
描述 输入两个递增的链表,单个链表的长度为n,合并这两个链表并使新链表中的节点仍然是递增排序的。 数据范围: 0≤n≤1000,−1000≤节点值≤1000 如输入{1,3,5},{2,4,6}时,合并后的链表为{1,2,3,4,5,6},…...

JAVA_7
JAVA_7 JAVA面向对象编程1. 抽象方法和抽象类 JAVA面向对象编程 1. 抽象方法和抽象类 使用abstract修饰的方法,没有方法体,只有声明。定义的是一种“规范”,就是告诉子类必须要给抽象方法提供具体的实现。包含抽象方法的类就是抽象类。通过…...
)
最大连续1的个数 III(LeetCode)
题目 给定一个二进制数组 nums 和一个整数 k,如果可以翻转最多 k 个 0 ,则返回 数组中连续 1 的最大个数 。 解题 def longestOnes(nums, k):left 0max_len 0zero_count 0for right in range(len(nums)):# 如果遇到0,统计当前窗口内0的个…...

Vue之前端批量下载文件并以压缩包形式存储
后端返回一个文件链接的数组,前端处理下载逻辑,并且将这些文件存储在压缩包内部,这用的jszip 和 file-saver 这两个库。 步骤说明 1.使用 npm 或 yarn 安装 jszip 和 file-saver。 npm install jszip file-saver 2.获取文件内容:…...

【AI学习】LLaMA模型的微调成本有几何?
在前面文章《LLaMA 系列模型的进化(二)》中提到了Stanford Alpaca模型。 Stanford Alpaca 基于LLaMA (7B) 进行微调,通过使用 Self-Instruct 方法借助大语言模型进行自动化的指令生成,Stanford Alpaca 生成了 52K 条指令遵循样例数…...

【专题】2024全数驱动 致胜未来-数字化敏捷银行白皮书报告合集PDF分享(附原数据表)
原文链接: https://tecdat.cn/?p37404 政策明确发展使命,新时代商业银行应坚持党建引领,秉持高质量发展理念。数字经济已成大势,商业银行需构建数字基础设施能力,强化顶层战略规划。当前商业银行数字化发展面临诸多挑…...

280Hz显示器哪家强
280Hz显示器哪家强?今天就给大家带来6大品牌和型号的280Hz显示器一起对比对比! 1.280Hz显示器 - HKC G27H3显示器 HKC G27H3是一款高性价比的电竞显示器,以下是它的一些特点: - **高刷新率与快速响应**: - 拥有280H…...

ROUTE_STATUS
ROUTE_STATUS是一个只读属性,由Vivado路由器分配给网络 反映网络上路由的当前状态。 该属性可以由单个网络或一组网络使用 get_property或report_property命令。该物业由 report_route_status命令返回整个设计的route_status。 架构支持 所有架构。 适用对象 •网络…...
 yuyv(yuv422)、MJPEG、H.264)
v4l2(video4linux2) yuyv(yuv422)、MJPEG、H.264
V4L2(Video4Linux2)是Linux内核中的视频设备接口框架,专门用于捕获和输出视频数据。V4L2广泛应用于各种视频设备的驱动程序开发,如网络摄像头、电视调谐器、视频采集卡、以及其他视频输入/输出设备。 ### V4L2的主要功能 1. **视…...

.Net插件开发开源框架
在.NET开发中,有许多开源框架可以用于插件开发,以下是一些最常见的框架: MEF(Managed Extensibility Framework) MEF是一个用于创建可插拔软件应用程序的库,它可以在不修改原始应用程序的情况下扩展应用程…...

基于Spark实现大数据量的Node2Vec
基于Spark实现大数据量的Node2Vec Node2Vec 是一种基于图的学习算法,用于生成图中节点的低维度、高质量的向量表示。这种算法基于 word2vec 模型,将自然语言处理中的词嵌入技术应用于图结构的节点,以捕捉节点之间的复杂关系。Node2Vec 特别强…...

[VMware]VMware-Esxi 6.7 厚置备转为精简置备
背景:创建了一个win10 60G的厚置备磁盘,现在想改为精简置备。 先关闭win10系统,并删除快照 1、开启shell 2、登录到虚拟存放的目录 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [rootxxx:~] cd /vmfs/volumes/5fea055e-458157d3-c8f8-8cec4ba51c4…...

Timer 时序大模型云服务来了!TimechoAI 开放邀请体验
本文约4000字,建议阅读5分钟 基于时序大模型 Timer,面向时序预测与智能分析的 TimechoAI 时序大模型云服务期待您参与内测!企业今天并不缺时序数据。真正稀缺的,是如何把这些持续积累的历史数据更低门槛地利用起来,为业…...

Taotoken CLI工具安装与一键配置全模型环境指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken CLI工具安装与一键配置全模型环境指南 对于需要接入多个大模型服务的开发团队而言,统一管理API密钥、模型配置…...

电源管理芯片瞬态测试技术解析与优化方案
1. 电源管理芯片瞬态测试的重要性与挑战在当今移动通信和便携式电子设备中,处理器工作频率已进入GHz时代,这对电源管理系统提出了前所未有的严苛要求。作为电源管理系统的核心组件,低压差线性稳压器(LDO)和降压型开关稳压器(Buck Regulator)的…...

2026 汽车运动权威盘点:历史悠久、级别最高的标杆赛事解读
在汽车产业飞速发展的今天,汽车运动早已超越单纯的竞技比拼,成为彰显工业实力、传递汽车文化、连接产业与消费者的重要桥梁。2026 年,全球汽车运动市场持续升温,国际顶级赛事与国内标杆赛事同频共振、百花齐放。而那些历史悠久、级…...
)
在服务器上如何去部署Codex(AutoDL or 其他的服务器)
在本地 VSCode 中使用 Codex 时,如果通过 Remote-SSH 连接 AutoDL 或其他远端服务器,常常会遇到 Codex 无法正常响应、请求中断、地区限制、stream disconnected before completion 等问题。其根本原因通常是:Codex 的请求实际发生在远端服务…...

告别裸机轮询:在STM32F103上为AHT20温湿度采集加入FreeRTOS实时任务管理
从裸机轮询到RTOS任务管理:STM32F103与AHT20温湿度传感器的架构升级实战 在嵌入式开发领域,如何从简单的功能实现进阶到健壮的软件架构设计,是每个开发者必须面对的挑战。本文将带你完成一次典型的架构升级——将基于STM32F103的AHT20温湿度传…...

Silk v3解码器终极指南:高效转换微信QQ语音为MP3格式
Silk v3解码器终极指南:高效转换微信QQ语音为MP3格式 【免费下载链接】silk-v3-decoder [Skype Silk Codec SDK]Decode silk v3 audio files (like wechat amr, aud files, qq slk files) and convert to other format (like mp3). Batch conversion support. 项目…...

AI学术研究技能包:从论文导读到实验设计的全流程自动化助手
1. 项目概述:一个为AI研究助手打造的学术技能包如果你正在用Claude Code、ChatGPT/Codex CLI或者Gemini CLI这类AI编程助手做研究,大概率遇到过这样的场景:想让AI帮你读篇论文,它却只能泛泛而谈;想让AI设计个实验&…...

从硬开关到软开关:推挽谐振变换器原理与PSIM仿真实战
1. 从经典到谐振:为什么我们需要推挽变换器?在电源设计的工具箱里,推挽变换器(Push-Pull Converter)绝对算得上是一位“老将”。它的核心思想非常直观:利用一个带中心抽头的变压器,让两个开关管…...

AppleRa1n终极指南:3步免费绕过iOS 15-16激活锁限制
AppleRa1n终极指南:3步免费绕过iOS 15-16激活锁限制 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 你是否正为忘记Apple ID密码而无法使用自己的iPhone而烦恼?或者购买的二手苹…...