Linux下的PWM驱动
PWM
PWM简介⭕
**PWM(Pulse Width Modulation,脉冲宽度调制)**是一种利用微处理器的数字输出对模拟电路进行控制的技术。通过改变脉冲的占空比,可以控制模拟电路的输出电压或电流。PWM技术广泛应用于电机控制、灯光调节、音频信号生成等领域。
PWM频率和占空比⭕
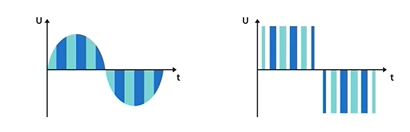
周期:PWM信号的重复周期,即一个PWM信号从高电平到低电平再到高电平的时间间隔。
频率:PWM信号的重复频率,即每秒钟PWM信号的重复次数。频率与周期成反比,频率 = 1 / 周期。
占空比:PWM信号的脉冲宽度与周期的比值,即高电平时间占整个周期的比例。占空比可以取0到1之间的任意值。
PWM的应用⭕
面积等效原理:
冲量相等而形状不同的窄宽脉冲加在具有惯性的环节上,其效果基本相同
- 冲量相等而形状不同是指面积相等
- 惯性环节在电路和系统分析中,当输入信号发生变化时,其输出不会立即跟随变化,而是需要经过一段时间后才能逐渐达到新的稳态值。
通俗的说:电压不同,时间不同的俩个信号,当他们的电压和时间的乘积相等的时候,输出的波形信号是相同的
pwm的子系统框架图
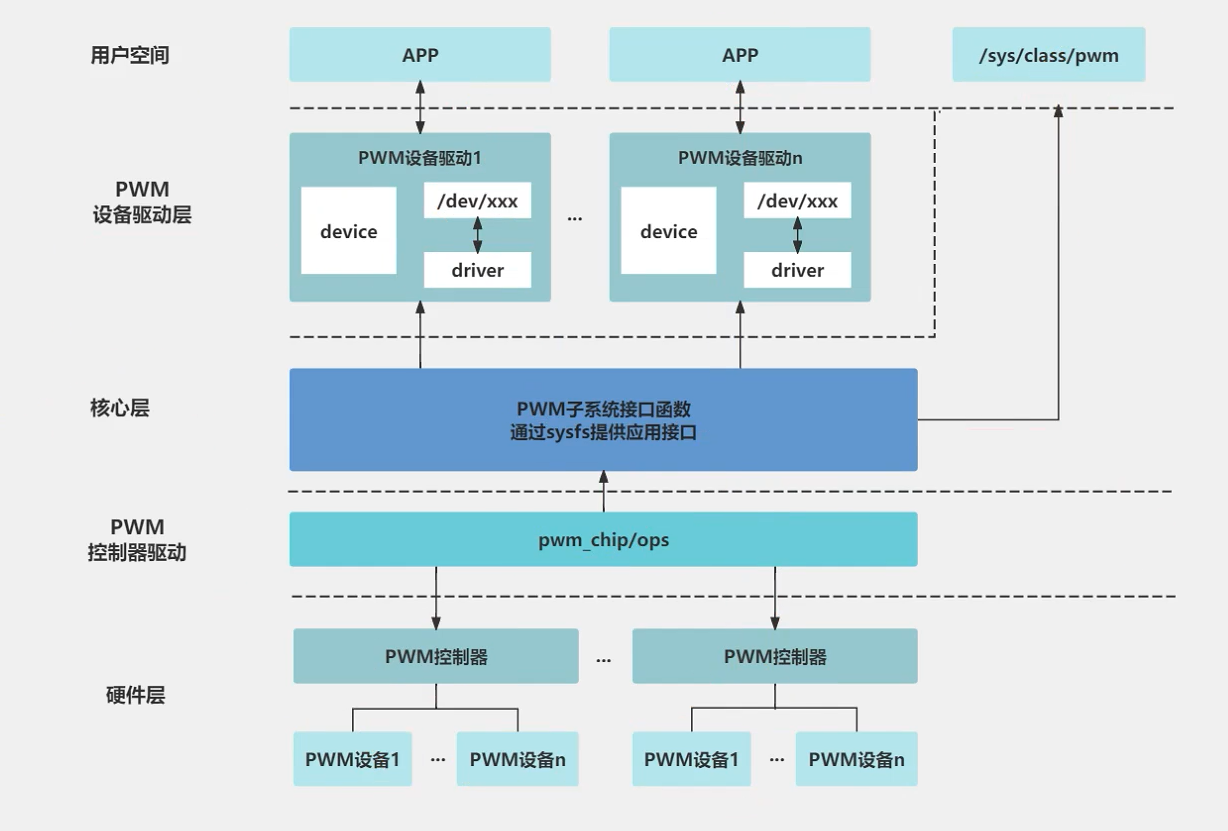
两种驱动方法:
- 直接在应用层操作
sys/class/pwm - 编写驱动程序后在应用层调用
PWM驱动编写:⭕
Linux内描述一个PWM控制器的结构体:
struct pwm_chip {struct device *dev;const struct pwm_ops *ops;int base;unsigned int npwm;struct pwm_device * (*of_xlate)(struct pwm_chip *pc,const struct of_phandle_args *args);unsigned int of_pwm_n_cells;/* only used internally by the PWM framework */struct list_head list;struct pwm_device *pwms;ANDROID_KABI_RESERVE(1);
};PWM常有API:
pwm_config函数
int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns) //改变pwm配置
| 参数 | 作用 |
|---|---|
| *pwm | pwm_device |
| duty_ns | 占空比 |
| period_ns | 周期 |
成功返回0,失败返回负数
pwm_set_polarity函数
int pwm_set_polarity(struct pwm_device *pwm, enum pwm_polarity polarity) //设置pwm极性
| 参数 | 作用 |
|---|---|
| *pwm | pwm_device |
| polarity | pwm极性 |
成功返回0,失败返回负数
pwm_enable函数
int pwm_enable(struct pwm_device *pwm) //使能pwm
| 参数 | 作用 |
|---|---|
| *pwm | pwm_device |
成功返回0,失败返回负数
pwm_disable函数
int pwm_disable(struct pwm_device *pwm) //禁止pwm
| 参数 | 作用 |
|---|---|
| *pwm | pwm_device |
成功返回0,失败返回负数
pwm_request函数
struct pwm_device *pwm_request(int pwm, const char *label) //申请pwm
| 参数 | 作用 |
|---|---|
| pwm | pwm号 |
| label | pwm标签 |
成功返回pwm_device,失败返回NULL
pwm_free函数
void pwm_free(struct pwm_device *pwm) //释放pwm
| 参数 | 作用 |
|---|---|
| *pwm | pwm_device |
无返回
devm_pwm_get函数
int devm_pwm_get(struct device *dev, const char *con_id)//获取PWM设备句柄
| 参数 | 作用 |
|---|---|
| *dev | 设备 |
| con_id | pwm标签 |
成功返回pwm_device句柄,失败返回负数
driver层的使用:⭕
使用platform_driver的实现驱动注册,匹配设备树节点即可。
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/gpio.h>
#include <linux/delay.h>
#include <linux/pwm.h>struct pwm_device *pwm_dev;dev_t dev_num; // 设备号static int major = 0; /* 主设备号, 0 表示由系统分配 */struct class *class; // 类和对象static int pwm_driver_open(struct inode *, struct file *)
{pwm_config(pwm_dev, 500000, 2000000); // 周期2000000ns,占空比500000nspwm_set_polarity(pwm_dev, PWM_POLARITY_NORMAL); // 设置极性pwm_enable(pwm_dev); // 启动PWMreturn 0;
}
static int pwm_driver_release(struct inode *, struct file *)
{pwm_free(pwm_dev);return 0;
}static struct file_operations pwm_fops = {.owner = THIS_MODULE,.open = pwm_driver_open,.release = pwm_driver_release};static int pwm_driver_probe(struct platform_device *pdev)
{int ret = 0;pwm_dev = devm_of_pwm_get(&pdev->dev, dev->dev.of_node, NULL);if (IS_ERR(pwm_dev)){printk("get pwm device failed\n");return -1;}// 添加字符设备节点int err;major = register_chrdev(0, "hello", &pwm_fops);class = class_create(THIS_MODULE, "hello_class");err = PTR_ERR(class);if (IS_ERR(class)){printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "hello");return -1;}device_create(class, NULL, MKDEV(major, 0), NULL, "hello"); /* 设备节点/dev/hello创建 */return 0;
}static int pwm_remove(struct platform_device *pdev)
{unregister_chrdev(major, "hello");class_destroy(class);if (!pwm_dev){pwm_free(pwm_dev);}return 0;
}static const struct of_device_id pwm_of_match[] = {{.compatible = "pwm_test"},{},
};
MODULE_DEVICE_TABLE(of, pwm_of_match);static struct platform_driver pwm_driver = {.driver = {.name = "pwm_test",.of_match_table = pwm_of_match,},.probe = pwm_driver_probe,.remove = pwm_remove,
};static int __init pwm_init(void)
{return platform_driver_register(&pwm_driver);
}static void __exit pwm_exit(void)
{platform_driver_unregister(&pwm_driver);
}
module_init(pwm_init);
module_exit(pwm_exit);
MODULE_LICENSE("GPL");
模拟PWM
使用模拟PWM,即使用定时器来模拟PWM信号。给GPIO配置为输出模式,然后通过定时器来控制GPIO的电平变化,从而实现PWM信号的产生。
配置设备树,指定一个LED的GPIO引脚
led {compatible = "gpio-led";gpios = <&gpio0 9 GPIO_ACTIVE_LOW>;
};
在驱动中,通过与设备树probe获取GPIO引脚,然后配置为输出模式,并使用定时器来控制GPIO的电平变化,从而实现PWM信号的产生。
高精度定时器
普通定时器的时钟频率可以设置在 100Hz 到 1000Hz 之间,所以精度只能限制在毫秒级别。所以无法满足精度较高的场景当中,为此 Linux 提供了高精度定时器,可以提供纳秒级别的精度。
struct hrtimer结构体
// include/linux/hrtimer.h高精度定时器
struct hrtimer {struct timerqueue_node node;ktime_t _softexpires;//定时时间enum hrtimer_restart (*function)(struct hrtimer *);//超时服务函数struct hrtimer_clock_base *base;u8 state;u8 is_rel;u8 is_soft;u8 is_hard;ANDROID_KABI_RESERVE(1);
};
// include/linux/timer.h普通定时器
struct timer_list {struct list_head entry;unsigned long expires; //定时时间void (*function)(unsigned long);//超时服务函数unsigned long data;unsigned int flags;int slack;
};
hrtimer_init函数
//初始化一个定时器
void hrtimer_init(struct hrtimer *timer, clockid_t which_clock,enum hrtimer_mode mode);
| 参数 | 作用 |
|---|---|
| timer | 要初始化的定时器 |
| which_clock | 定时器所使用的时钟类型,比如 CLOCK_REALTIME、CLOCK_MONOTONIC 等 |
| hrtimer_mode | 定时器模式,比如 HRTIMER_MODE_REL、HRTIMER_MODE_ABS 等 |
ktime_set函数
//设置定时时间
ktime_t ktime_set(const <error-type> secs, const unsigned long nsecs);
| 参数 | 作用 |
|---|---|
| secs | 秒 |
| nsecs | 纳秒 |
hrtimer_start函数
//启动定时器
int hrtimer_start(struct hrtimer *timer, ktime_t time, const enum hrtimer_mode mode);
| 参数 | 作用 |
|---|---|
| timer | 要启动的定时器 |
| time | 定时时间 |
| mode | 定时器模式 |
hrtimer_forward函数
//定时器延时
void hrtimer_forward(struct hrtimer *timer, ktime_t now, ktime_t interval);
| 参数 | 作用 |
|---|---|
| timer | 要延时的定时器 |
| now | 当前时间 |
| interval | 延时时间 |
hrtimer_cancel函数
//取消定时器
int hrtimer_cancel(struct hrtimer *timer);
| 参数 | 作用 |
|---|---|
| timer | 要取消的定时器 |
Source_code
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/gpio.h>
#include <linux/delay.h>
#include <linux/pwm.h>struct pwm_data{int sum_conut; // 总计数int high_count; // 高电平计数struct gpio_desc *gpio; // GPIOstruct hrtimer pwm_timer; // 定时器int time; // 定时时间
};
struct pwm_data *data;
struct pwm_device *pwm_dev;dev_t dev_num; // 设备号static int major = 0; /* 主设备号, 0 表示由系统分配 */struct class *class; // 类和对象
enum hrtimer_restart pwm_timer_func(struct hrtimer *timer){//container_of 宏来从一个结构体成员的指针中获取包含它的结构体指针/*timer 是指向 pwm_timer 成员的指针。struct pwm_data 是包含 pwm_timer 成员的结构体类型。pwm_timer 是 struct pwm_data 结构体中的一个成员。*/static int timer_count = 0;struct pwm_data *mydata = container_of(timer, struct pwm_data, pwm_timer); if(timer_count == mydata->sum_conut){gpiod_set_value(mydata->gpio, 1);timer_count = 0;}if(timer_count == mydata->high_count){gpiod_set_value(mydata->gpio, 0);}timer_count++if(mydata->high_count == 0){timer_count = 0;}hrtimer_forward(timer, timer->_softexpires, mydata->time); // 定时器重新启动, 调整定时器的到期时间为当前时间加上mydata->timereturn HRTIMER_RESTART; // 重启定时器
}
static int pwm_driver_open(struct inode *, struct file *)
{return 0;
}
static int pwm_driver_release(struct inode *, struct file *)
{return 0;
}
static long pwm_driver_ioctl(struct file *file, unsigned int cmd, unsigned long arg){}
static ssize_t pwm_driver_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos){int ret = 0;int kbuf[2];ret = copy_from_user(kbuf, buf, count);data->sum_conut = kbuf[0]; //总计数,周期data->high_count = kbuf[1];//高电平计数,占空比return ret;
}
static struct file_operations pwm_fops = {.owner = THIS_MODULE,.open = pwm_driver_open,.release = pwm_driver_release,.unlocked_ioctl = pwm_driver_ioctl,.write = pwm_driver_write,
};static int pwm_driver_probe(struct platform_device *pdev)
{data = kmalloc(sizeof(struct pwm_data), GFP_KERNEL);data->sum_conut = 20;data->high_count = 10;// 添加字符设备节点int err;major = register_chrdev(0, "hello", &pwm_fops);class = class_create(THIS_MODULE, "hello_class");err = PTR_ERR(class);if (IS_ERR(class)){printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "hello");return -1;}device_create(class, NULL, MKDEV(major, 0), NULL, "hello"); /* 设备节点/dev/hello创建 */data->gpio = gpiod_get(&pdev->dev,"gpio-led",GPIOF_OUT_INIT_HIGH) //获取GPIOgpiod_set_value(data->gpio, 1);//设置GPIO高电平data->time = ktime_set(0,1000000); //定时器时间1ms,返回总时间hrtimer_init(&data->pwm_timer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);//初始化定时器,CLOCK_MONOTONIC表示定时器从系统启动开始计时,HRTIMER_MODE_REL表示定时器从当前时间开始计时data->pwm_timer.function = pwm_timer_func;//定时器回调函数hrtimer_start(&data->pwm_timer, data->time, HRTIMER_MODE_REL);//启动定时器return 0;
}static int pwm_remove(struct platform_device *pdev)
{return 0;
}static const struct of_device_id pwm_of_match[] = {{.compatible = "pwm_test"},{},
};
MODULE_DEVICE_TABLE(of, pwm_of_match);static struct platform_driver pwm_driver = {.driver = {.name = "pwm_test",.of_match_table = pwm_of_match,},.probe = pwm_driver_probe,.remove = pwm_remove,
};static int __init pwm_init(void)
{return platform_driver_register(&pwm_driver);
}static void __exit pwm_exit(void)
{hrtimer_cancel(&data->pwm_timer);kfree(data);platform_driver_unregister(&pwm_driver);device_destroy(class, MKDEV(major, 0));class_destroy(class);unregister_chrdev(major, "hello");}
module_init(pwm_init);
module_exit(pwm_exit);
MODULE_LICENSE("GPL");相关文章:
Linux下的PWM驱动
PWM PWM简介⭕ **PWM(Pulse Width Modulation,脉冲宽度调制)**是一种利用微处理器的数字输出对模拟电路进行控制的技术。通过改变脉冲的占空比,可以控制模拟电路的输出电压或电流。PWM技术广泛应用于电机控制、灯光调节、音频信号…...

日语输入法平假名和片假名切换
在学日语输入法的时候,我们在使用罗马音输入的时候,在进行平假名和片假名切换: 1、使用电脑在打字,日语输入法切换的时候使用 Shift Alt 如果日语输入法显示为 A 需要切换为 あ的话可以按Caps Lock键 。(相当于中文…...

Oracle向量搜索及其应用场景
Oracle 向量搜索(AI Vector Search)是一个集成到 Oracle 数据库中的功能,旨在优化人工智能(AI)工作负载。它允许用户存储和查询非结构化数据的语义内容,如文档、图像等,形式为向量。 向量数据类…...

【排序算法】六、快速排序补充:三指针+随机数法
「前言」文章内容是对快速排序算法的补充,之前的算法流程细节多难处理,这里补充三指针随机数法(递归),这个容易理解,在时间复杂度上也更优秀。 快排:三指针随机数法 原理跟之前的一致ÿ…...

PyTorch torch.cdist函数介绍及示例代码
1. torch.cdist 函数介绍 torch.cdist 是 PyTorch 中用于计算两组向量之间成对距离的函数。它可以计算两个张量(矩阵)中的每对向量之间的距离,支持多种距离度量方式,如欧氏距离(默认)或 p 范数距离。 函数原型 torch.cdist(x1, x2, p=2.0, compute_mode=use_mm_for_eu…...

CTK框架(四): 插件编写
目录 1.生成插件 1.1.环境说明 1.2.服务类,纯虚类,提供接口 1.3.实现插件类,实现纯虚函数 1.4.激活插件,加入ctk框架的生命周期中 1.5.添加资源文件 1.6..pro文件 2.使用此插件 3.总结 1.生成插件 1.1.环境说明 编译ct…...

深入理解C代码中的条件编译
引言 条件编译是 C 编程中的一个重要特性,它允许开发人员根据不同的条件选择性地编译源代码的不同部分。这一特性对于编写跨平台的程序、优化代码性能或控制编译时资源消耗等方面非常重要。本文将深入探讨条件编译的工作原理、使用场景、高级应用以及注意事项&…...

Ubuntu16.04操作系统-内核优化
1. 概述 本文所用优化是生产环境中经过长期验证的内核优化策略,针对的服务器与POD主要用于高CPU、高内存、高IO的业务场景。 备注: OS: ubuntu16.04, 内核: 4.15.0-147-generic 主要涵盖以下内容优化: ulimit优化加强tcp参数其他内存参数 …...

Qt/C++编写的Onvif调试助手调试神器工具/支持云台控制/预置位设置等/有手机版本
一、功能特点 广播搜索设备,支持IPC和NVR,依次返回。可选择不同的网卡IP进行对应网段设备的搜索。依次获取Onvif地址、Media地址、Profile文件、Rtsp地址。可对指定的Profile获取视频流Rtsp地址,比如主码流地址、子码流地址。可对每个设备设…...

【原创】java+swing+mysql密码管理器系统设计与实现
个人主页:程序员杨工 个人简介:从事软件开发多年,前后端均有涉猎,具有丰富的开发经验 博客内容:全栈开发,分享Java、Python、Php、小程序、前后端、数据库经验和实战 文末有本人名片,希望和大家…...

JavaEE-HTTPHTTPS
目录 HTTP协议 一、概念 二、http协议格式 http请求报文 http响应报文 URL格式 三、认识方法 四、认识报头 HTTP响应中的信息 HTTPS协议 对称加密 非对称加密 中间人攻击 解决中间人攻击 HTTP协议 一、概念 HTTP (全称为 "超⽂本传输协议") 是⼀种应⽤…...
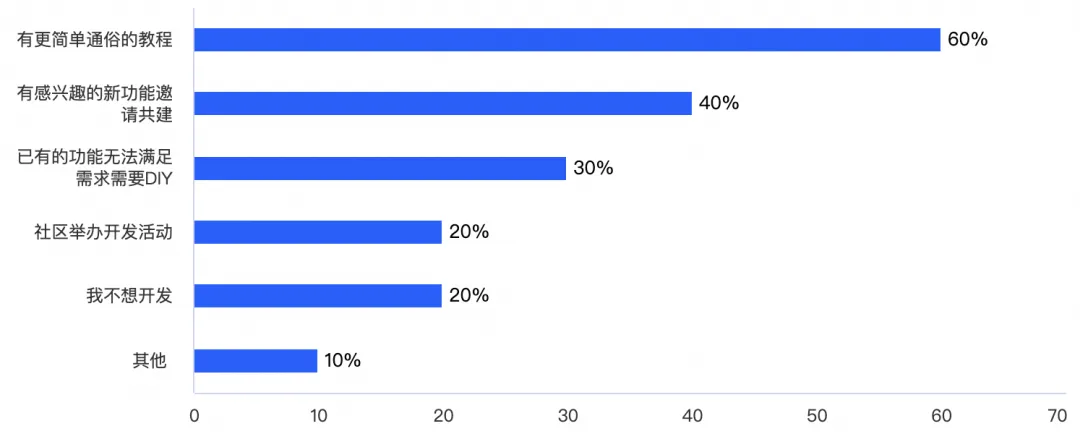
iLogtail 开源两周年:社区使用调查报告
作者:玄飏 iLogtail 作为阿里云开源的可观测数据采集器,以其高效、灵活和可扩展的特性,在可观测采集、处理与分析领域受到了广泛的关注与应用。在 iLogtail 两周年之际,我们对 iLogtail 开源社区进行了一次使用调研,旨…...

Ubuntu 比较两个文件夹
比较两个文件夹下的大量文件是否一致,可以通过以下几种方式完成: 1. 使用 diff 命令 diff 命令不仅可以比较文件,还能递归比较文件夹。可以使用 -r 选项来递归比较两个目录下的文件: diff -r /path/to/dir1 /path/to/dir2 如…...

两数之和--力扣1
两数之和 题目思路C代码 题目 思路 根据题目要求,元素不能重复且不需要排序,我们这里使用哈希表unordered_map。注意题目说了只对应一种答案。 所以我们在循环中,使用目标值减去当前循环的nums[i],得到差值,如果我们…...
new()创建Vue实例)
vue原理分析(三)new()创建Vue实例
今天我们来分析Vue实例的创建 代码如下: Vue.config.productionTip falsenew Vue({render: h > h(App),}).$mount(#app) Vue.config.productionTip false 这个配置成false,是阻止启动生产消息 new Vue({render: h > h(App),}).$mount(#app)…...

Spring MVC: 构建Web应用的强大框架
Spring MVC: 构建现代Web应用的强大框架 1. MVC设计模式简介 MVC (Model-View-Controller) 是一种广泛使用的软件设计模式,它将应用程序的逻辑分为三个相互关联的组件: Model (模型): 负责管理数据、业务逻辑和规则。View (视图): 负责用户界面的展示,将数据呈现给用户。Con…...

网络学习-eNSP配置NAT
NAT实现内网和外网互通 #给路由器接口设置IP地址模拟实验环境 <Huawei>system-view Enter system view, return user view with CtrlZ. [Huawei]undo info-center enable Info: Information center is disabled. [Huawei]interface gigabitethernet 0/0/0 [Huawei-Gigabi…...

动态规划-最长回文子串
题目描述 给你一个字符串 s,找到 s 中最长的 回文子串。 对于该题使用中心扩展法在某些情况下可以比动态规划方法更优,尤其是在处理较长字符串时。这是因为中心扩展法具有更好的空间复杂度,并且在实际应用中可能具有更快的运行速度…...

海康威视 嵌入式 面经 海康威视嵌入式软件 嵌入式硬件总结面试经验 面试题目汇总
标题海康威视 嵌入式 面经 海康威视嵌入式软件 嵌入式硬件总结面试经验 面试题目汇总 整理总结了海康威视嵌入式的面试题目!,可以供大家面试参考 标题海康威视 嵌入式 面经 五月底投递,六月初面试,一场技术面,一场H…...

使用图论技巧——有遍数限制的最短路
给定一个 n个点 m 条边的有向图,图中可能存在重边和自环, 边权可能为负数。 请你求出从 11 号点到 n 号点的最多经过 k 条边的最短距离,如果无法从 1 号点走到 n 号点,输出 impossible。 注意:图中可能 存在负权回路…...

MT-R1-Zero:基于强化学习的机器翻译范式革新与实战指南
1. 项目概述:当强化学习遇上机器翻译 在机器翻译这个老牌的自然语言处理任务里,我们似乎已经习惯了“数据驱动”的剧本:收集海量的双语平行句对,用它们来监督训练模型,让模型学会从源语言到目标语言的映射。这套方法&a…...

Wand-Enhancer:完全免费解锁WeMod专业版功能的终极指南
Wand-Enhancer:完全免费解锁WeMod专业版功能的终极指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂订阅费用而烦…...

通过用量看板清晰观测Taotoken的API调用成本与消耗
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过用量看板清晰观测Taotoken的API调用成本与消耗 对于将大模型能力集成到产品中的团队而言,API调用成本是项目预算与…...

3PEAK思瑞浦 TPA6532-VS1R MSOP8 运算放大器
特性 供电电压:1.75伏至5.5伏 偏移电压:土1.5mV(最大) 通用峰值电压:300kHz,斜率:0.15V/us 轨到轨输入和输出 0.1Hz至10Hz电压噪声:1Vpp 开机和关机电流期间无明显输出抖动 低功耗:每通道最大25安培工作温度范围:-40C至125C...

长期使用Taotoken Token Plan套餐带来的成本节约感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken Token Plan套餐带来的成本节约感受 1. 项目背景与成本挑战 我们团队负责一个持续进行文本分析与内容生成的内部…...

AMD Ryzen隐藏性能调优利器:SMUDebugTool硬件调试工具完全指南
AMD Ryzen隐藏性能调优利器:SMUDebugTool硬件调试工具完全指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

深入解析AlienFX Tools:从硬件直连到个性化灯光控制的完整技术方案
深入解析AlienFX Tools:从硬件直连到个性化灯光控制的完整技术方案 【免费下载链接】alienfx-tools Alienware systems lights, fans, and power control tools and apps 项目地址: https://gitcode.com/gh_mirrors/al/alienfx-tools 在Alienware设备生态中&…...

中兴光猫深度管理:用zteOnu工具解锁隐藏的管理权限
中兴光猫深度管理:用zteOnu工具解锁隐藏的管理权限 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 想象一下,你正在管理一个企业网络,面对几十台中兴…...

如何让旧电脑联网?安卓手机以太网共享来帮忙!
通过安卓手机以太网共享让旧电脑联网2026 年 5 月 21 日,阅读时长 3 分钟。有人喜欢摆弄 90 年代和 21 世纪初的旧电脑和软件,比如童年时的 Amiga 500 电脑至今仍被保留且让人爱不释手。不过,Windows 9x/XP 时代的计算机使用经历最让人怀念&a…...

Java + Spring Boot 操作 Kafka 完整学习指南
前置条件:ZooKeeper 集群 Kafka 集群已启动(3个ZK节点 3个Broker) Broker 地址:172.17.0.7:9092, 172.17.0.7:9093, 172.17.0.7:9094第一阶段:原生 Java API 操作 Kafka目的:理解底层原理,Spr…...