【python计算机视觉编程——10.OpenCV】
python计算机视觉编程——10.OpenCV
- 10.OpenCV
- 10.2 OpenCV基础知识
- 10.2.1 读取和写入图像
- 10.2.2 颜色空间
- 10.2.3 显示图像及结果
- 10.3 处理视频
- 10.3.1 视频输入
- 10.3.2 将视频读取到NumPy数组中
- 10.4 跟踪
- 10.4.1 光流
- 10.4.2 Lucas-Kanade算法
- 使用跟踪器
- 使用发生器
- 10.5 更多示例
- 10.5.1图像修复
10.OpenCV
10.2 OpenCV基础知识
10.2.1 读取和写入图像
import cv2
from pylab import *
im=cv2.imread('sun.jpg')
h,w=im.shape[:2]
print(h,w)cv2.imwrite('result.png',im)
10.2.2 颜色空间
im=cv2.imread('sun.jpg')
# 创建灰度图像
# COLOR_BGR2GRAY、COLOR_BGR2RGB、COLOR_GRAY2BGR
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
imshow(gray)

10.2.3 显示图像及结果
import cv2
# 读取图像
im = cv2.imread('sun.jpg')
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)# 计算积分图像
intim = cv2.integral(gray)# 归一化并保存
intim = (255.0*intim) / intim.max()
cv2.imwrite('result.jpg',intim)
import cv2# 读取图像
filename = 'sun.jpg'
im = cv2.imread(filename)
h,w = im.shape[:2]
# 泛洪填充
diff = (6,6,6)
mask = np.zeros((h+2,w+2),uint8)
cv2.floodFill(im,mask,(10,10), (255,255,0),diff,diff)
# 在OpenCV 窗口中显示结果
cv2.imshow('flood fill',im)
cv2.waitKey()
# 保存结果
cv2.imwrite('result.jpg',im)
from pylab import *
im1=cv2.imread('result_10.2.3-1.jpg')
im2=cv2.imread('result_10.2.3-2.jpg')
gray()
subplot(121)
imshow(im1)
subplot(122)
imshow(im2)

import cv2# 初始化 ORB 检测器
orb = cv2.ORB_create()# 读取图像
image = cv2.imread('sun.jpg', cv2.IMREAD_GRAYSCALE)# 检测关键点和描述符
keypoints, descriptors = orb.detectAndCompute(image, None)# 在图像上绘制关键点
output_image = cv2.drawKeypoints(image, keypoints, None)# 显示结果
cv2.imshow('ORB Keypoints', output_image)
cv2.waitKey(0)
cv2.destroyAllWindows()

10.3 处理视频
10.3.1 视频输入
import cv2#设置视频捕获
# cap = cv2.VideoCapture(0) #可以是摄像头的索引
cap = cv2.VideoCapture('MARSCONCERT.mp4') #也可以是视频的名称if not cap.isOpened():print("无法打摄像机")exit()while True:ret,im = cap.read()cv2.imshow('video_test',im)key = cv2.waitKey(10)if key == 27: #Esc键退出breakif key == ord(' '): #空格抓拍cv2.imwrite('vid_result.jpg',im)# 释放摄像头并关闭所有窗口
cap.release()
cv2.destroyAllWindows()

还可以对实时显示的图像进行模糊
import cv2# 1. 捕获视频
cap = cv2.VideoCapture('MARSCONCERT.mp4') # 0通常代表默认的摄像头,也可以替换为视频文件的路径# 检查摄像头是否成功打开
if not cap.isOpened():print("Error opening video stream or file")exit()# 2. 设置输出视频参数
# fourcc = cv2.VideoWriter_fourcc(*'XVID') # 选择编码器
# out = cv2.VideoWriter('output.avi', fourcc, 20.0, (640, 480)) # 输出视频文件名、编码器、帧率、分辨率# 3. 读取并处理帧
while(cap.isOpened()):ret, frame = cap.read() # 读取一帧if ret == True:blur = cv2.GaussianBlur(frame,(0,0),5)# 将处理后的帧写入输出视频# out.write(gray)# 显示帧(可选)cv2.imshow('frame', blur)key = cv2.waitKey(10)if key == 27: #(Esc键)breakif key == ord(' '):cv2.imwrite('vid_result.jpg',im)else:break# 完成后释放资源
cap.release()
# out.release()
cv2.destroyAllWindows()

10.3.2 将视频读取到NumPy数组中
import cv2
import numpy as np
cap = cv2.VideoCapture('MARSCONCERT.mp4')frames=[]
# 获取帧,存储到数组中
flag=0
while True:ret,im = cap.read()if flag==0:print(im.shape)flag=1if ret == True:cv2.imshow('video',im)frames.append(im)if cv2.waitKey(10) == 27:print(im.shape)breakelse:break
frames = np.array(frames)# 检查尺寸
print(frames.shape)# 完成后释放资源
cap.release()
cv2.destroyAllWindows() # 有帧数、帧高、帧宽及颜色通道数(3个),共记录了181帧

10.4 跟踪
10.4.1 光流
- 光流法主要依赖于三个假设。
- 亮度恒定:图像中目标的像素强度在连续帧之间不会发生变化。
- 时间规律:相邻帧之间的时间足够短,以至于在考虑运行变化时可以忽略它们之 间的差异。该假设用于导出下面的核心方程。
- 空间一致性:相邻像素具有相似的运动。
import cv2
import numpy as np
def draw_flow(im,flow,step=16):""" 在间隔分开的像素采样点处绘制光流"""h,w = im.shape[:2] # 获取图像的高度和宽度y,x = np.mgrid[step/2:h:step,step/2:w:step].reshape(2,-1) # 生成间隔分开的采样点坐标y, x = y.astype(np.int32), x.astype(np.int32) # 转换为整数类型# print(y,x)fx,fy = flow[y,x].T # 获取每个采样点的光流向量分量# 创建线的终点lines = np.vstack([x,y,x+fx,y+fy]).T.reshape(-1,2,2)lines = np.int32(lines)# 创建图像并绘制vis = cv2.cvtColor(im,cv2.COLOR_GRAY2BGR) # 将灰度图像转换为彩色图像for (x1,y1),(x2,y2) in lines:cv2.line(vis,(x1,y1),(x2,y2),(0,255,0),1) # 绘制光流的线条cv2.circle(vis,(x1,y1),1,(0,255,0), -1) # 在起点绘制小圆点return vis
# 设置视频捕获
cap = cv2.VideoCapture('小镇里的花.mp4')
ret,im = cap.read()
prev_gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)while True:# 获取灰度图像ret,im = cap.read()gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)#计算流 flow = cv2.calcOpticalFlowFarneback(prev_gray,gray,None,0.5,3,15,3,5,1.2,0)prev_gray = gray#画出流矢量 cv2.imshow('Optical flow',draw_flow(gray,flow))if cv2.waitKey(10) == 27:break
cap.release()
cv2.destroyAllWindows()

10.4.2 Lucas-Kanade算法
import cv2# 一些常数及默认参数
lk_params = dict(winSize=(15,15),maxLevel=2,criteria=(cv2.TERM_CRITERIA_EPS|cv2.TERM_CRITERIA_COUNT,10,0.03))
subpix_params = dict(zeroZone=(-1,-1),winSize=(10,10),criteria = (cv2.TERM_CRITERIA_COUNT|cv2.TERM_CRITERIA_EPS,20,0.03))
feature_params = dict(maxCorners=500,qualityLevel=0.01,minDistance=10)class LKTracker(object):"""用金字塔光流Lucas-Kanade跟踪类"""def __init__(self,imnames):""" 使用图像名称列表初始化"""self.imnames = imnamesself.features = []self.tracks = []self.current_frame = 0def detect_points(self):""" 利用子像素精确度在当前帧中检测“利于跟踪的好的特征”(角点) """#载入图像并创建灰度图像self.image = cv2.imread(self.imnames[self.current_frame])self.gray = cv2.cvtColor(self.image,cv2.COLOR_BGR2GRAY)#搜索好的特征点features = cv2.goodFeaturesToTrack(self.gray, **feature_params)#提炼角点位置cv2.cornerSubPix(self.gray,features, **subpix_params)self.features = featuresself.tracks = [[p] for p in features.reshape((-1,2))]self.prev_gray = self.graydef track_points(self):""" 跟踪检测到的特征""" if self.features != []:self.step() # 移到下一帧# 载入图像并创建灰度图像self.image = cv2.imread(self.imnames[self.current_frame])self.gray = cv2.cvtColor(self.image,cv2.COLOR_BGR2GRAY)# reshape() 操作,以适应输入格式tmp = np.float32(self.features).reshape(-1, 1, 2)# 计算光流features,status,track_error = cv2.calcOpticalFlowPyrLK(self.prev_gray,self.gray,tmp,None,**lk_params)# 去除丢失的点self.features = [p for (st,p) in zip(status,features) if st]# 从丢失的点清楚跟踪轨迹features = np.array(features).reshape((-1,2))for i,f in enumerate(features):self.tracks[i].append(f)ndx = [i for (i,st) in enumerate(status) if not st]ndx.reverse()# 从后面移除for i in ndx:self.tracks.pop(i) self.prev_gray = self.graydef step(self,framenbr=None):""" 移到下一帧。如果没有给定参数,直接移到下一帧"""if framenbr is None:self.current_frame = (self.current_frame + 1) % len(self.imnames)else:self.current_frame = framenbr % len(self.imnames)def draw(self):"""用OpenCV 自带的画图函数画出当前图像及跟踪点,按任意键关闭窗口""" # 用绿色圆圈画出跟踪点for point in self.features:cv2.circle(self.image,(int(point[0][0]),int(point[0][1])),3,(0,255,0),-1)cv2.imshow('LKtrack',self.image)cv2.waitKey()
import numpy as np
imnames = ['bt.003.pgm', 'bt.002.pgm', 'bt.001.pgm', 'bt.000.pgm']# 创建跟踪对象
lkt = LKTracker(imnames)
# 在第一帧进行检测,跟踪剩下的帧
lkt.detect_points()
lkt.draw()
for i in range(len(imnames)-1):lkt.track_points()lkt.draw()cv2.waitKey(0)
cv2.destroyAllWindows()




将下面的方法添加到LKTracker类:
def track(self):""" 发生器,用于遍历整个序列""" for i in range(len(self.imnames)):if self.features == []:self.detect_points()else:self.track_points()# 创建一份RGB副本f = array(self.features).reshape(-1,2)im = cv2.cvtColor(self.image,cv2.COLOR_BGR2RGB)yield im,f
from pylab import *
imnames = ['viff.000.ppm', 'viff.001.ppm','viff.002.ppm', 'viff.003.ppm', 'viff.004.ppm']
# 用LKTracker 发生器进行跟踪
lkt = LKTracker(imnames)
for im,ft in lkt.track():print('tracking %d features' % len(ft))
# 画出轨迹
figure()
imshow(im)
for p in ft:plot(p[0],p[1],'bo')
for t in lkt.tracks:plot([p[0] for p in t],[p[1] for p in t])
axis('off')
show()

10.5 更多示例
10.5.1图像修复
import numpy as np
import cv2#读取图片
img = cv2.imread('repair.png')
#图像转换为灰度图像
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#灰度二值化
_,mask = cv2.threshold(cv2.cvtColor(img,cv2.COLOR_BGR2GRAY),100,255,cv2.THRESH_BINARY_INV)
dst = cv2.inpaint(img,mask,10,cv2.INPAINT_NS) #3:领域大小
cv2.imshow('img0',img)
#cv2.imshow('img10',mask1)
cv2.imshow('img1',mask)
cv2.imshow('img2',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
下图为修复前的图像

下图为掩模图

下图为修复图像,可以看到,虽然黑线被修复了,但是整体图像中,原本不需要修复的地方,会被修复函数当作是需要修复的

相关文章:
【python计算机视觉编程——10.OpenCV】
python计算机视觉编程——10.OpenCV 10.OpenCV10.2 OpenCV基础知识10.2.1 读取和写入图像10.2.2 颜色空间10.2.3 显示图像及结果 10.3 处理视频10.3.1 视频输入10.3.2 将视频读取到NumPy数组中 10.4 跟踪10.4.1 光流10.4.2 Lucas-Kanade算法使用跟踪器使用发生器 10.5 更多示例…...

医学数据分析实训 项目二 数据预处理预备知识(数据标准化处理,数据离差标准化处理,数据二值化处理,独热编码处理,数据PCA降维处理)
文章目录 数据预处理预备知识任务一 数据标准化处理1. 数据准备2. 数据标准化 任务二 数据离差标准化处理任务三 数据二值化处理任务五 独热编码处理对数据进行“离散化处理”(装箱)将已经装箱的数据进行OneHotEncoder独热编码 任务六 数据PCA降维处理1.…...

MySQL查询执行(四):查一行也很慢
假设存在表t,这个表有两个字段id和c,并且我在里面插入了10万行记录。 -- 创建表t CREATE TABLE t (id int(11) NOT NULL,c int(11) DEFAULT NULL,PRIMARY KEY (id) ) ENGINEInnoDB;-- 通过存储过程向t写入10w行数据 delimiter ;; create procedure idat…...

【Obsidian】当笔记接入AI,Copilot插件推荐
当笔记接入AI,Copilot插件推荐 自己的知识库笔记如果增加AI功能会怎样?AI的回答完全基于你自己的知识库余料,是不是很有趣。在插件库中有Copilot插件这款插件,可以实现这个梦想。 一、什么是Copilot? 我们知道githu…...

Spring Cloud集成Gateaway
Spring Cloud Gateway 是一个基于 Spring 生态的网关框架,用于构建微服务架构中的API网关。它可以对请求进行路由、过滤、限流等操作,是Spring Cloud微服务体系中常用的组件之一。下面介绍 Spring Cloud Gateway 的核心概念、应用场景以及简单的示例。 …...
如何准备技术面试?
大家好,我是老三,好久没更新了,翻出之前的一篇旧稿,是一篇总纲性质的文章——如何准备一场技术面试。这篇文章原本的开头是写给金三银四的,转眼就“金九银十”了,每一年都是最差的一年,又是未来…...
Kafka原理剖析之「Topic创建」
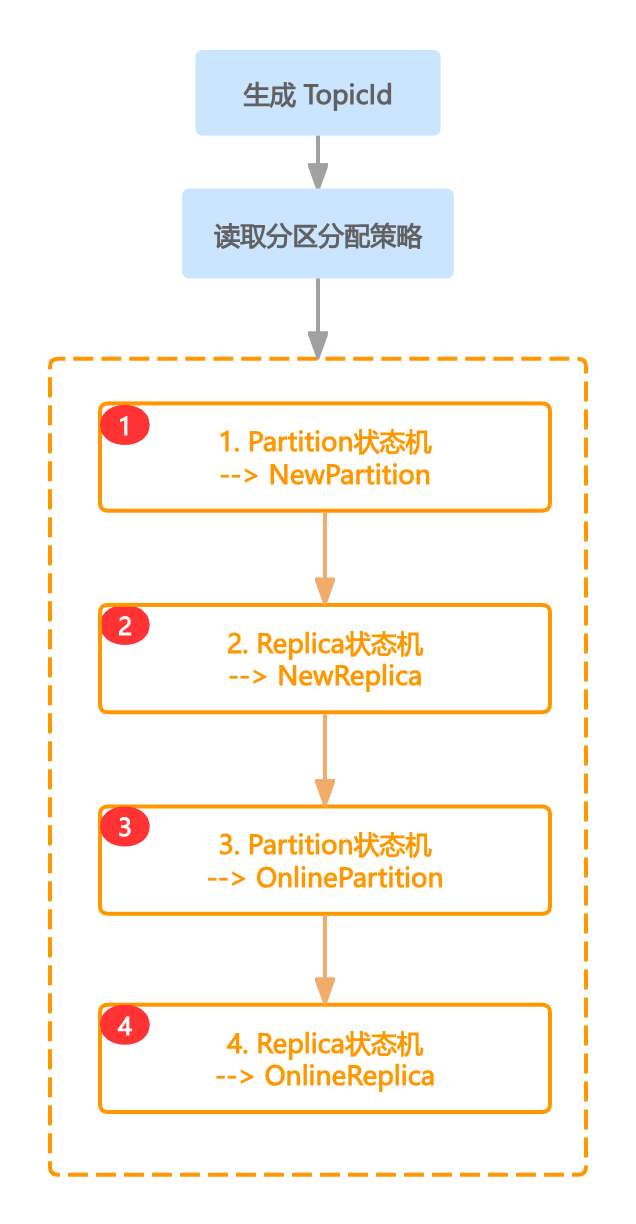
一、前言 Kafka提供了高性能的读写,而这些读写操作均是操作在Topic上的,Topic的创建就尤为关键,其中涉及分区分配策略、状态流转等,而Topic的新建语句非常简单 bash kafka-topics.sh \ --bootstrap-server localhost:9092 \ // …...

Java 高级学习路线概要~
前言:恭喜你已经掌握了 Java 的基础知识!现在,让我们踏上 Java 高级学习之旅,探索更强大的编程技巧和技术。学习前记得不要忘了巩固和加强基础的学习哦,高级学习也是建立在基础的学习之上。 1. 集合框架进阶 Map 接口…...

浏览器插件快速开启/关闭IDM接管下载
假设你已经为浏览器安装了IDM扩展,那么按下图的点击顺序,可以快速开启或关闭IDM的下载接管,而不必在IDM软件的设置->选项中,临时作调整。...

初识c++:入门基础
打字不易,留个赞再走吧~~ 目录 一.第一个c程序二.命名空间 namespace三.C输⼊&输出四.缺省参数 C兼容C语⾔绝⼤多数的语法,所以C语⾔实现的hello world依旧可以运⾏,C中需要把定义⽂件 代码后缀改为.cpp 一.第一个c程序 做好准备我们来写…...

Java Exception 异常相关总结
1.简介 在Java中,当代码运行有问题时会抛出异常,主要分为两类: 1.可以通过try...catch来捕获解决的,不影响后续执行的RuntimeException。 2.不可以通过代码解决的Exception。 为了提高代码的健壮性,我们会选择去捕…...
HighCharts图表自动化简介
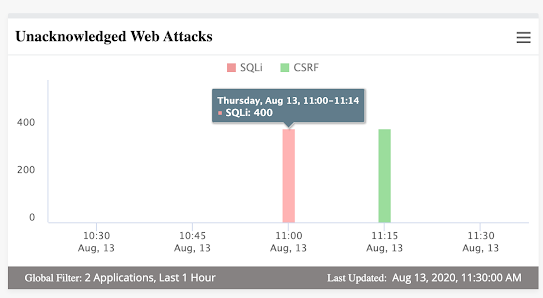
什么是分析数据? 在任何应用程序中捕获并以图形或图表形式显示的分析数据是任何产品或系统的关键部分,因为它提供了对实时数据的洞察。 验证此类分析数据非常重要,因为不准确的数据可能会在报告中产生问题,并可能影响应用程序/系统的其他相关领域。 什么是HighChart? …...

使用LDAP登录GitLab
使用LDAP登录GitLab gitlab.rb 配置如下 gitlab_rails[ldap_enabled] true #gitlab_rails[prevent_ldap_sign_in] false###! **remember to close this block with EOS below** gitlab_rails[ldap_servers] YAML.load <<-EOSmain:label: LDAPhost: 172.16.10.180port:…...

【2024】前端学习笔记5-表单标签使用
表单是网页提供的一种交互式操作手段,主要用于采集用户输入的信息。 学习笔记 1.表单框架:form标签1.1.action属性:目标指向1.2.method属性:提交方式1.3.id属性:唯一标识1.4.placeholder属性:提示文字2.input标签2.1.text类型:基本文本输入2.2.password类型:密码输入2.…...
)
数据结构--二叉树(C语言实现,超详细!!!)
文章目录 二叉树的概念代码实现二叉树的定义创建一棵树并初始化组装二叉树前序遍历中序遍历后序遍历计算树的结点个数求二叉树第K层的结点个数求二叉树高度查找X所在的结点查找指定节点在不在完整代码 二叉树的概念 二叉树(Binary Tree)是数据结构中一种…...

【将字符串变为空的编辑距离】
题目描述 求由s串变成t串的编辑距离 在s串的开头/末尾添加一个字符,花费p 在s串的开头/末尾添加一个s串的子串,花费q 每次作都是基于当前的s串 s串初始为空 分析 等价于将一个字符串变为空串的过程 第一层按照长度遍历(如果按照下标i,j遍…...

卡特兰数的推理
卡特兰数(Catalan number),又称卡塔兰数、明安图数,是组合数学中一种常出现于各种计数问题中的数列。它以比利时数学家欧仁查理卡特兰的名字命名,但值得注意的是,这一数列的首次发现可以追溯到1730年&#…...

高精度治具加工的重要性和优势
在现代工业制造中,高精度治具加工扮演着举足轻重的角色。它不仅关乎产品制造的精度与质量,还直接影响到生产效率和成本控制。因此,时利和将深入探讨高精度治具加工的重要性和优势,对于提升工业制造水平具有重要意义。 高精度治具加…...

新版IDEA提示@Autowired不建议字段注入
随着项目的复杂度的增加,我们通常会在一个业务类中注入其他过多的业务类。从而使当前的业务层扩充成一个大而全的功能模块。那么就容易出现一下问题 字段注入会让依赖关系变得不那么明显,因为你无法通过构造函数看到所有的依赖项。使用构造函数时&#…...

adb的安装和使用 以及安装Frida 16.0.10+雷电模拟器
.NET兼职社区 .NET兼职社区 .NET兼职社区 1.下载adb Windows版本:https://dl.google.com/android/repository/platform-tools-latest-windows.zip 2.配置adb环境变量 按键windowsr打开运行,输入sysdm.cpl,回车。 高级》环境变量》系统变量》…...

如何永久珍藏你的微信数字记忆?WeChatMsg让聊天记录成为永恒财富!
如何永久珍藏你的微信数字记忆?WeChatMsg让聊天记录成为永恒财富! 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/Gi…...
)
ElevenLabs语音合成效果翻倍的秘密(行业未公开的声学参数调优矩阵)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs英文语音合成效果翻倍的核心洞察 关键瓶颈在于语音上下文建模粒度 ElevenLabs 的高质量语音合成并非单纯依赖更大模型参数量,而是通过细粒度的语义-韵律联合编码实现自然度跃升。…...

第07章 FastMCP 把检索封装成 Agent 工具
第07章 FastMCP 把检索封装成 Agent 工具 工单知识库已经能在 Python 进程内被普通函数调用,但要让外部 Agent、Web 后端或其他语言的客户端使用这份能力,函数级别的接口不够:缺少协议、缺少描述、缺少跨进程通讯。MCP(Model Cont…...

恶劣环境下LED发光服饰的可靠系统构建:从设计到工艺的工程实践
1. 项目概述与核心挑战如果你曾经尝试过制作一件会发光的服装,无论是为了音乐节、万圣节还是水下表演,你大概都体会过那种“亮一次,修三次”的挫败感。LED灯带在工作室的桌面上测试时完美无瑕,一旦穿到身上,开始活动、…...

Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞!
Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞! 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 还在为Windows系统…...

开源办公套件自动化部署与集成实战:基于OpenOffice的服务化解决方案
1. 项目概述:为什么我们需要一个“开源”的办公套件?如果你在GitHub上搜索过办公软件相关的仓库,大概率会看到过longyangxi/OpenOffice这个项目。乍一看,你可能会以为这是一个Apache OpenOffice的镜像或者某个分支。但点进去仔细研…...

基于RP2040与CircuitPython的键盘内嵌DOOM游戏启动器DIY指南
1. 项目概述与核心思路几年前,我还在用笨重的全尺寸键盘时,就总琢磨着怎么给这每天摸上八小时的家伙加点“私货”。直到后来玩起了RP2040和CircuitPython,一个念头就冒出来了:能不能把游戏直接“焊”进键盘里?不是那种…...

基于意图与技能解耦的智能对话系统构建指南
1. 项目概述:一个意图与技能驱动的AI对话引擎最近在折腾AI应用开发,特别是对话型AI助手时,发现一个核心痛点:如何让AI不仅能理解用户说了什么(意图识别),还能精准地调用相应的功能(技…...

AI Agent架构深度解析:从核心原理到工程实践
1. 项目概述:一次关于AI Agent的深度技术探险最近在GitHub上看到一个名为“tvytlx/ai-agent-deep-dive”的项目,光看标题就让人眼前一亮。这显然不是一个简单的“Hello World”式教程,而是一次对AI Agent(智能体)技术的…...

基于树莓派与QT Py的本地化物联网红外遥控器DIY指南
1. 项目概述与核心价值想没想过,把家里那堆遥控器——电视的、机顶盒的、空调的、音响的——统统集成到一个你手机能打开的网页里?而且这个控制中心完全在你家局域网里运行,不依赖任何云服务,不用担心厂商倒闭后设备变砖。今天分享…...