STM32之TIM编码器接口

编码器简介:

例子讲解:正交编码器有两个输出,一个A相,一个B相,AB接口输出正交信号。然后接入STM32的定时器的编码器接口,编码器接口自动控制定时器时基单元中的CNT计数器进行自增或自减,比如初始化之后,CNT初始值为0,然后编码器右转,CNT就++,右转产生一个脉冲,CNT就加一次,比如右转产生10个脉冲(上升沿或者下降沿)之后,停下来,那么这个过程CNT就由0自增到10,停下来,编码器右=左转,CNT--,左转产生一个脉冲,CNT减一次,比如编码器再左转产生5个脉冲,那就在原来10的基础上自减5,停下来。
这个编码器接口,其实就相当于是一个带有方向控制的外部时钟,它同时控制这CNT的计数时钟和计数方向,这样的话,CNT的值就表示了编码器的位置,如果我们每隔一段时间取一次CNT的值,再把CNT清零,是不是每次取出来的值就表示了,编码器的速度,由上一篇笔记中的测频法和测周法的知识,这个编码器就是测频法测正交脉冲的频率,CNT计次然后每隔一段时间去一次计数值,只不过这个编码器接口更加高级,它能根据旋转方向,不仅可以自增计次,还可以自减计次,是一个带方向的测速
编码器接口资源比较紧张,如果一个定时器被配置成编码器接口模式,那它基本上就干不了其他的活了(如STM32F103C8T6只有4个定时器,所以最多只能接4个编码器),如果编码器不够用的话就要考虑一下资源够不够用,也可通过使用EXTI外部中断这就是用软件资源弥补硬件资源
每个定时器的CH3和CH4不能接编码器
正交编码器:
用正交信号的好处:
a、正交信号精度更高,因为A、B相都可以计次,相当关于计次频率提高了一倍
b、其次正交信号可以以抗噪声,因为正交信号两个信号必须是交替跳变的,可以设计一个抗噪声电路,如果一个信号不变,另一个信号连续跳变,也就是产生了噪声,这时计次值是不会变化的
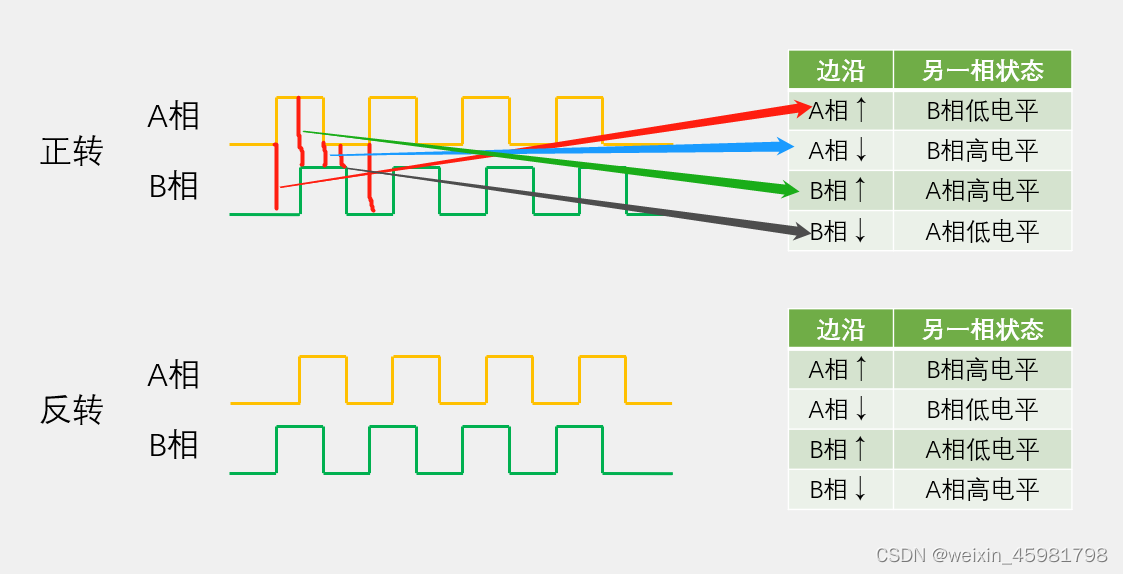
编码器接口的设计逻辑:
首先把A相和B相的所有边缘,作为计数器的计数时钟,出现边缘信号时就计数自增或自减,增还是减由另一相的高低电平决定。

编码器接口有使用CH1和CH2的输入捕获滤波器和边沿检测(高低电平是否反转,也就是TI,T2是否反相),编码器接口没有使用后面的是否交叉、预分频器、CCR寄存器与编码器接口无关
编码器接口的输出部分:相当于从模式控制器,去控制CNT的计数时钟和计数方向
注:在这里,我们并不会使用72M内部时钟和在时基单元初始化设置的计数方向,因为此时计数时钟和计数方向都处于编码器接口托管的状态,计数器的自增和自减手编码器控制
编码器接口基本结构示意图

整体工作模式:

注:1、正转的状态都向上计数,反转的状态都向下计数
2、一般选择第三个模式(在TI1和TI2上计数),精度高
实例讲解以及正交信号抗噪声原理:
TI1和TI2都不反向

TI1反相,TI2不反相(相当于把T1的信号取反再依据表格里的规则进行计数)

若发现正转自减、反转自增,则应该把某个极性反相,就能反转计数方向,或者TI1\TI2调换
编码器接口测速实验
1、功能:每隔一段时间去计数值,就能得到编码器旋转的速度
向右旋转:计数为正,想左旋转,计数为负,大小均为速度
现在:通过定时器的编码器接口,自动计次(节约软件资源)
之前:触发外部中断,在中断函数中自动计次
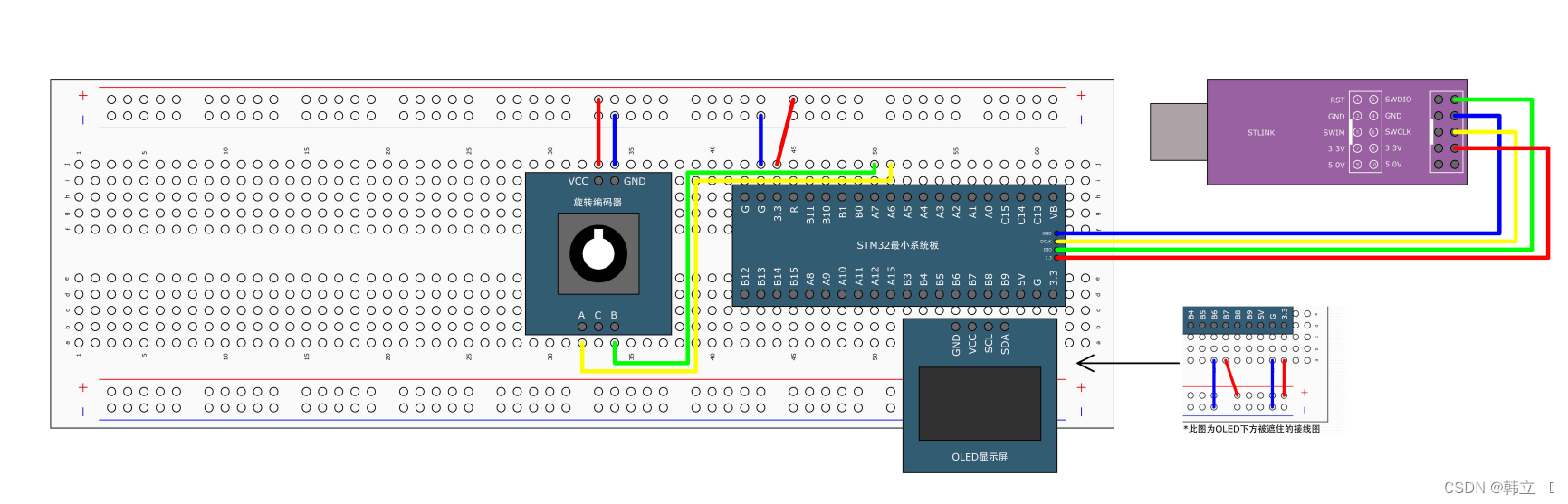
原理图:
步骤:
第一步:RCC开启时钟,开启GPIO和定时器的时钟
第二步:配置GPIO,PA6和PA7配置成输入模式
第三步:配置时基单元,预分频器选择不分频,自动重装,一般给最大65535,只需要给CNT执行计数即可
第四步:配置输入捕获单元(只有滤波器和极性两个参数)
第五步:配置编码器接口模式(调用库函数)
最后,调用TIM_Cmd开启定时器
电路初始化后,CNT会随着编码器旋转而自增自减
若想测量编码器的位置:直接读出CNT即可
测量编码器的速度和方向:需要每隔一段固定的闸门时间,取出一次CNT,然后再把CNT清零,这是测频法测量速度,需要用到定时器功能。
4、代码:
Encoder.c
#include "stm32f10x.h" // Device headervoid Encoder_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure); //设置默认值TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //这里的上升沿不代表上升沿有效,仅仅代表高低电平极性不反转。TIM_ICInitStructure.TIM_ICFilter = 0xF;TIM_ICInit(TIM3, &TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;//TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //这里的上升沿不代表上升沿有效,仅仅代表高低电平极性不反转。TIM_ICInitStructure.TIM_ICFilter = 0xF;TIM_ICInit(TIM3, &TIM_ICInitStructure);//编码器接口配置TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//TIM_EncoderMode_TI12:根据TI1FP1和TI2FP2边的计数//TIM_ICPolarity_Rising:这里的上升沿不代表上升沿有效,仅仅代表高低电平极性不反转。Rising:极性不反转TIM_Cmd(TIM3, ENABLE);
}int16_t Encoder_Get(void)
{int16_t Temp;Temp = TIM_GetCounter(TIM3); //读取计次值TIM_SetCounter(TIM3, 0); //清零计次值return Temp;
}
Timer.c(1秒触发一次中断)
#include "stm32f10x.h" // Device headervoid Timer_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM2, TIM_FLAG_Update);TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM2, ENABLE);
}/*
void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
*/
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "Encoder.h"int16_t Speed;int main(void)
{OLED_Init();Timer_Init();Encoder_Init();OLED_ShowString(1, 1, "Speed:");while (1){OLED_ShowSignedNum(1, 7, Speed, 5);}
}void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){Speed = Encoder_Get();TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
相关文章:
STM32之TIM编码器接口
编码器简介: 例子讲解:正交编码器有两个输出,一个A相,一个B相,AB接口输出正交信号。然后接入STM32的定时器的编码器接口,编码器接口自动控制定时器时基单元中的CNT计数器进行自增或自减,比如初始…...
b站第一,Python自动化测试实战详细教学,3天教你学会自动化测试
目录 简介 Python自动化测试概述 Python自动化测试目标 Python自动化测试流程 1. 测试计划和设计 2. 测试脚本开发 3. 测试执行和管理 4. 测试维护和优化 Python自动化测试最佳实践 Python自动化测试工具和框架 结论 简介 自动化测试是软件开发过程中一个必不可少的…...

刷题记录:P8804 [蓝桥杯 2022 国 B] 故障 条件概率
传送门:洛谷 题目描述: 题目较长,此处省略 输入: 3 5 30 20 50 0 50 33 25 0 30 0 35 0 0 0 0 0 25 60 1 3 输出: 2 56.89 1 43.11 3 0.00读完题目,我们会发现其实题目给了我们两个事件,并且这两个事件是相互关联的.因此不难想到使用条件概率 我们将故障原因看做事件AAA,结合…...

【算法】常用的基础数论
作者:指针不指南吗 专栏:算法篇 🐾或许会很慢,但是不可以停下🐾 文章目录1.GCD&LCM2.判断素数(质数)3.分解质因子1.GCD&LCM 最大公约数&最小共倍数 欧几里得算法——高效 //最大公约数 int gcd(int x,i…...

云原生场景下的容器网络隔离技术
云原生场景下的容器网络隔离技术 一、研究背景 随着云计算时代的到来,尤其是容器化技术的飞速发展,云原生作为云计算的未来阶段,其安全势必成为云安全的主要战场。从目前的云原生环境来看,云原生网络安全问题层出不穷࿰…...

用python绘制有向图
目录 添加边权重的有向图思路介绍代码实现效果图设置不同的样式节点和边的有向图思路介绍代码实现效果图下面的Python代码用于绘制有向图,其中使用了 networkx和 matplotlib.pyplot等库。 添加边权重的有向图 思路介绍 首先,创建了一个空的有向图像对象G,并添加了4个节点…...
—官方原版)
Spring MongoDB 开发教程(一)—官方原版
MongoDB支持包含一系列功能:Spring配置支持基于Java的configuration类或Mongo驱动程序实例和副本集的XML命名空间。MongoTemplate帮助类,在执行常见的Mongo操作时提高生产力。包括文档和POJO之间的集成对象映射。将异常转换为Spring的可移植数据访问异常…...
数据结构——二叉搜索树
一、二叉搜索树概念 二叉搜索树又叫二叉排序树,它或是空树,或是具有以下性质的二叉树: (1)若它的左子树不为空,则左子树上的所有节点的值都小于根节点的值; (2)若它的…...

23年5月高项学习笔记3---项目管理概述
项目是创造独特的产品、服务或成果而进行的临时性的工作 独特:每个项目都不一样 可交付成果:某一过程,阶段或项目完成时形成的独特的并且可验证的产品、服务或成果。 临时的:明确的起点和终点、 -------- 项目集: 相…...

【组织架构】中国铁路成都局集团有限公司
0 参考 中国铁路成都局集团有限公司 1 公司介绍 中国铁路成都局集团有限公司,是中国国家铁路集团有限公司管理的18个铁路局集团有限公司之一,简称“成局”,地处中国西南,管辖范围辐射四川、贵州、重庆地区。管内地形复杂&#x…...

剧前爆米花--爪哇岛寻宝】java多线程案例——单例模式、阻塞队列及生产者消费者模型、定时器、线程池
作者:困了电视剧 专栏:《JavaEE初阶》 文章分布:这是关于java多线程案例的文章,进行了对单例模式、阻塞队列及生产者消费者模型、定时器和线程池的讲解,希望对你有所帮助! 目录 单例模式 懒汉模式实现 饿…...

Guitar Pro8中文版更新说明及系统要求介绍
Guitar Pro吉他软件是初学作曲,特别是同时又初学吉他的朋友们的良师益友,是一款极佳的初级软件,是非实时作曲软件之中的一件佳作。Guitar Pro在吉他和弦、把位的显示、推算、查询、调用等方面,也异常方便、简洁、直观和浩瀚&#…...

【id:19】【20分】A. 三数论大小(引用)
题目描述 输入三个整数,然后按照从大到小的顺序输出数值。 要求:定义一个函数,无返回值,函数参数是三个整数参数的引用,例如int &a, int &b, int &c。在函数内对三个参数进行排序。主函数调用这个函数进行…...
)
To_Heart—总结——FWT(快速沃尔什变换)
目录闲话拿来求什么或与异或闲话 这个比FFT简单了很多呢,,大概是我可以学懂的水平! 好像是叫 快速沃尔什变换 ? 拿来求什么 以 FFT 来类比。我们 FFT 可以在 O(nlogn)\mathrm{O(nlogn)}O(nlogn) 的复杂度下实现求解࿱…...

Google巨大漏洞让Win10、11翻车,小姐姐马赛克白打了
早年间电脑截图这项技能未被大多数人掌握时,许多人应该都使用过手机拍屏幕这个原始的方式。 但由于较低的画面质量极其影响其他用户的观感,常常受到大家的调侃。 但到了 Win10、11 ,预装的截图工具让门槛大幅降低。 WinShiftS 就能快速打开…...
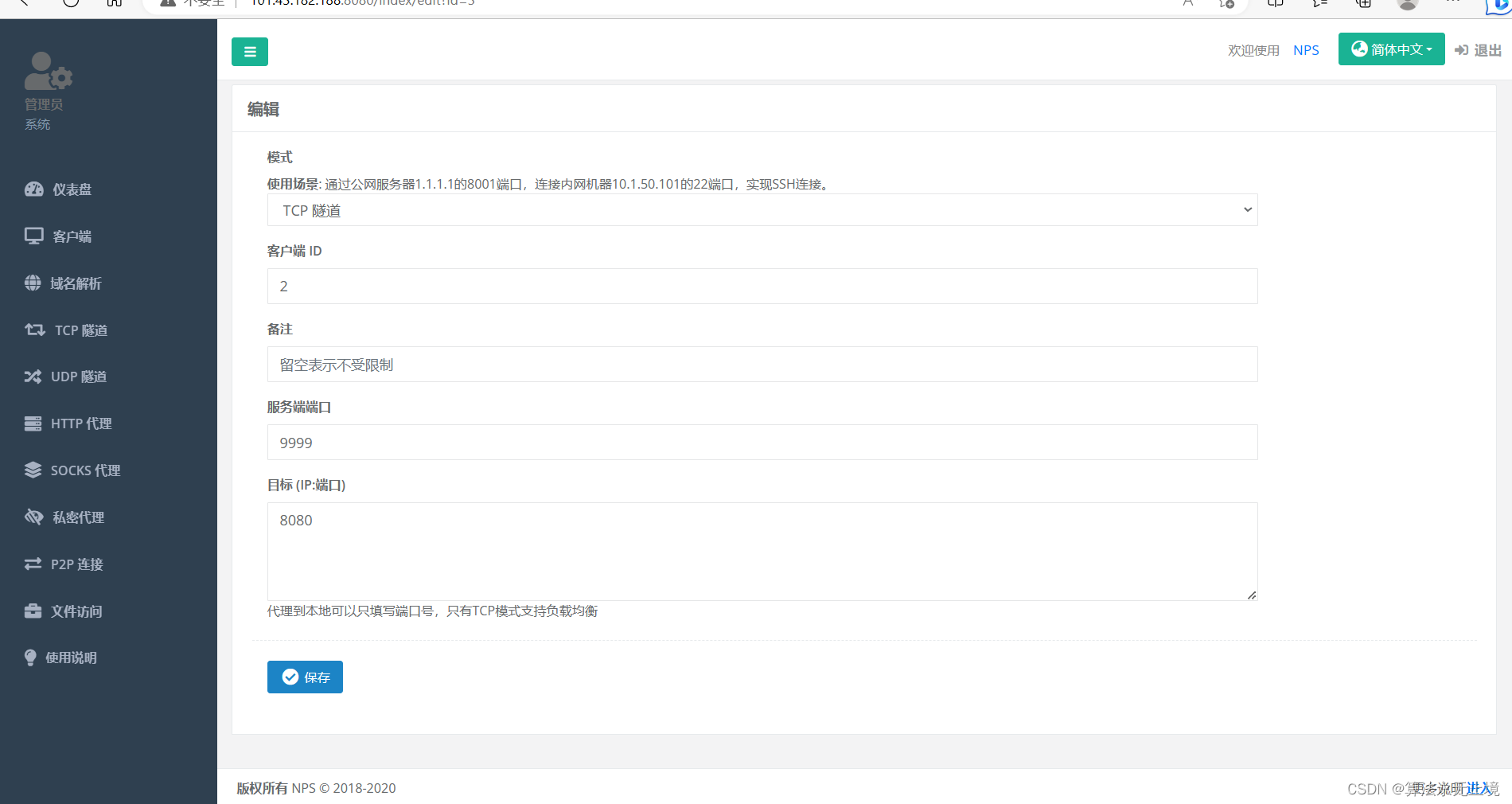
腾讯云服务器部署内网穿透(让其他人在不同ip可以访问我们localhost端口的主机项目)(nps开源项目)
首先打开shell连接我们的云服务器 然后我们再opt目录下面创建一个文件夹用来存放我们的压缩包和文件 mkdir /opt/nps 这个是它官方的安装图解.所以我们按照这个docker安装过程来: 然后我们用docker安装镜像.这样的话比较简单一点 docker pull ffdfgdfg/nps 然后我们查看docker…...

IDS、恶意软件、免杀技术、反病毒技术、APT、对称加密、非对称加密以及SSL的工作过程的技术介绍
IDS的简单介绍IDS是:入侵检测系统(intrusion detection system,简称“IDS”)是一种对网络传输进行即时监视,在发现可疑传输时发出警报或者采取主动反应措施的网络安全设备。它与其他网络安全设备的不同之处便在于&…...
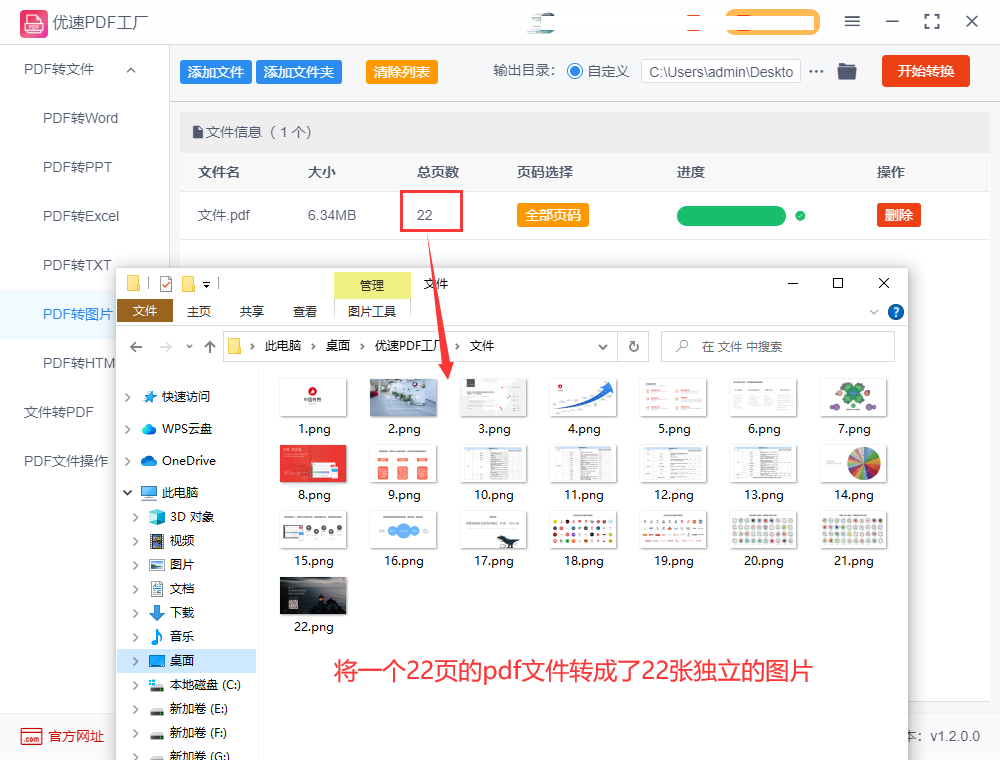
怎么把pdf转换成高清图片
怎么把pdf转换成高清图片?可以使用以下两种方法: 方法一:使用Adobe Acrobat Pro DC 1、打开需要转换的PDF文件,点击“文件”菜单中的“导出为”,在弹出的菜单中选择“图像”,然后选择“JPEG”。 2、在“…...
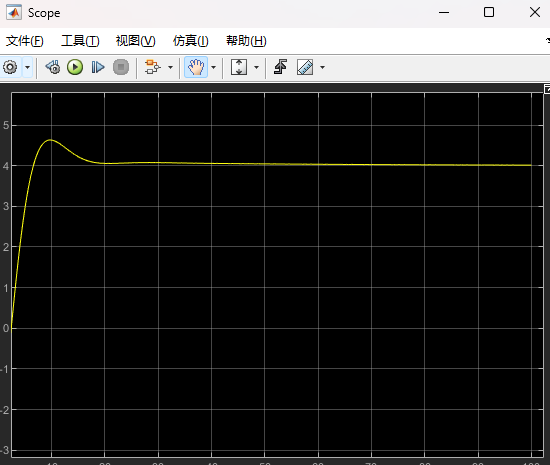
MATLAB 系统辨识 + PID 自动调参
系统辨识 PID 自动调参 文章目录系统辨识 PID 自动调参1. 导入数据1.1 从 Excel 中导入数据2. 系统辨识3. PID 自动调参1. 导入数据 1.1 从 Excel 中导入数据 如果不是从Excel中导入可以跳过该步骤 导入函数: [num,txt,raw]xlsread(xxx\xxx.xlsx);num返回的是…...

【vue3】组合式API之setup()介绍与reactive()函数的使用·上
>😉博主:初映CY的前说(前端领域) ,📒本文核心:setup()概念、 reactive()的使用 【前言】vue3作为vue2的升级版,有着很多的新特性,其中就包括了组合式API,也就是是 Composition API。学习组合…...

Netflix 4K画质与杜比音效优化指南:解锁你的流媒体最佳体验
Netflix 4K画质与杜比音效优化指南:解锁你的流媒体最佳体验 【免费下载链接】netflix-4K-DDplus MicrosoftEdge(Chromium core) extension to play Netflix in 4K(Restricted)and DDplus audio 项目地址: https://gitcode.com/gh_mirrors/n…...

技能与代码审计融合实践:构建安全开发思维与实战靶场
1. 项目概述:技能与代码审计的融合实践最近在和一些做安全开发的朋友聊天,大家普遍有个感受:现在单纯会写代码,或者单纯懂点安全皮毛,已经越来越不够用了。一个功能上线,开发觉得逻辑完美,但安全…...

Windows系统硬件指纹伪装:EASY-HWID-SPOOFER实战指南
Windows系统硬件指纹伪装:EASY-HWID-SPOOFER实战指南 【免费下载链接】EASY-HWID-SPOOFER 基于内核模式的硬件信息欺骗工具 项目地址: https://gitcode.com/gh_mirrors/ea/EASY-HWID-SPOOFER 在数字时代,保护个人隐私变得越来越重要。EASY-HWID-S…...

从零到一搭建 AI Agent 财务分析系统
一、核心目标拆解(先对齐业务) 你的系统要支撑 4 类核心场景: 财务报告自动生成 + 智能解读 智能问答 + 异常预警 财务预测、预算编制、风险识别 对接业务部门,推动需求落地 基于这个目标,我给你定了 **「轻量化 MVP → 企业级生产」两阶段架构 **,兼顾快速出 Demo 和长…...

大语言模型角色扮演技术:从原理到实践的完整指南
1. 项目概述:当大语言模型学会“扮演”角色最近在GitHub上看到一个挺有意思的项目,叫“awesome-llm-role-playing-with-persona”。光看名字,你大概能猜到它和大型语言模型以及角色扮演有关。简单来说,这个项目整理了一个资源列表…...

SAP MIGO BADI增强实战:从自定义表到屏幕集成的完整指南
1. SAP MIGO BADI增强实战入门 第一次接到MIGO屏幕增强需求时,我完全理解那种既兴奋又忐忑的心情。兴奋是因为终于有机会深入SAP核心模块的增强开发,忐忑则是因为MIGO作为物料管理的核心事务,任何改动都可能影响整个业务流程。经过多个项目的…...

TestDisk PhotoRec:专业级数据恢复工具,拯救你的宝贵数据
TestDisk & PhotoRec:专业级数据恢复工具,拯救你的宝贵数据 【免费下载链接】testdisk TestDisk & PhotoRec 项目地址: https://gitcode.com/gh_mirrors/te/testdisk 你是否曾经不小心删除了重要的工作文档?是否遇到过硬盘分区…...

基于Apify与AI模型的产品安全风险智能识别系统构建指南
1. 项目概述:一个面向产品安全与消费者风险管理的智能工具最近在梳理一些供应链和电商合规的项目时,我反复被一个核心痛点困扰:如何系统性地、自动化地识别和评估海量商品信息中潜藏的消费者风险?无论是作为平台方的风控团队&…...

恒宇信通收购神导科技,业绩V型反转、技术高度互补,能否开启增长新周期?
5月13日,恒宇信通(300965.SZ)在停牌筹划半个月后,携一份重磅资产重组预案强势复牌,开盘即收获20cm一字涨停,报收79.20元/股。根据预案,恒宇信通拟通过发行股份及支付现金的方式,收购…...

Niagara Editor界面详解:从零上手视觉特效创作
1. 认识Niagara Editor:视觉特效的创作工坊 第一次打开Niagara Editor时,满屏的面板和按钮可能会让你感到不知所措。别担心,这就像走进一个设备齐全的厨房——虽然工具很多,但每样都有其特定用途。作为Unreal Engine的粒子特效系…...