Unity即时战略/塔防项目实战(一)——构造网格建造系统
Unity即时战略/塔防项目实战(一)—— 构造网格建造系统
效果展示
Unity RTS游戏网格建造系统
实现原理
地形和格子划分,建造系统BuildManager构建
地形最终需要划分成一个一个的小方格,首先定义一下小方格:
private struct MapCellNode
{public float height; // 格子的中心高度public float steepness; // 格子的梯度public Building current; // 格子中存储的建筑
}
将地图分成m*n的小个子,用一个二维数组容纳这些格子,并对这些格子进行初始化:
// 盛放格子的容器
private static MapCellNode[,] mapCells;// 初始化格子,并计算每个格子的高度和坡度
private void InitMapCells()
{var terrainData = _terrain.terrainData;int gridWidth = (int)(terrainData.bounds.size.x / cellSize.x);int gridHeight = (int)(terrainData.bounds.size.z / cellSize.y);mapCells = new MapCellNode[gridWidth, gridHeight];for (int i = 0; i < gridWidth; ++i){for (int j = 0; j < gridHeight; ++j){mapCells[i, j].current = null;var center = GetCellLocalPosition(i, j);mapCells[i, j].height = center.y;var steepness = terrainData.GetSteepness(center.x / terrainData.size.x, center.z/terrainData.size.z);mapCells[i, j].steepness = steepness;}}
}
定义建造系统的一些API方便在其他地方使用:
// 根据格子索引,获取格子中心点的本地坐标
public static Vector3 GetCellLocalPosition(int w, int h)
{Vector3 withoutHeight = new(w * cellSize.x + cellSize.x * 0.5f, 0, h * cellSize.y + cellSize.y * 0.5f);return GetTerrainPosByLocal(withoutHeight);
}// 根据格子索引,获取格子中心点的世界坐标
public static Vector3 GetCellWorldPosition(int w, int h)
{return Instance.transform.TransformPoint(GetCellLocalPosition(w, h));
}// 计算地图上的本地坐标点,所属网格的索引
public static (int, int) GetCellIndexByLocalPosition(Vector3 local)
{return ((int)(local.x / Instance._cellSize.x), (int)(local.z / Instance._cellSize.y));
}// 计算地图上的世界坐标点,所属网格的索引
public static (int, int) GetCellIndexByWorldPosition(Vector3 world)
{return GetCellIndexByLocalPosition(Instance.transform.InverseTransformPoint(world));
}// 根据给定的格子区域(起始格子索引、宽度和高度),计算区域内所有格子的平均高度
public static float GetGridAverageHeight(int sx, int sy, int w, int h)
{float height = 0;int count = 0;for (int x = sx; x < sx+w; ++x){if( x < 0 || x >= gridSize.x)continue;for (int y = sy; y < sy + h; ++y){if( y < 0 || y >= gridSize.y)continue;height += mapCells[x, y].height;++count;}}if (count > 0)return height / count;return 0;
}
PreBuilding 和“开始建造”
由于一次只能建造一个建筑,因此,当开始建造时,首先持有待建造的物体,用current来保存待建造的物体。
// 开始建造,根据id查询待建物,并持有它。
public static void TakeBuilding(string id)
{if (!Instance.preBuildings.TryGetValue(id, out PreBuilding pb))return;BeginBuild(pb);
}// 准备建造指定的建筑物
private static void BeginBuild(PreBuilding pb)
{// 让待建物准备建造(重置待建物的材质参数等)pb.BeginBuild();currentBuilding = pb;// 在待建物周围绘制方格线Instance.buildLineDrawer.gameObject.SetActive(true);Transform trans = Instance.buildLineDrawer.transform;trans.SetParent(currentBuilding.transform);trans.localPosition = projectorOffset - currentBuilding.AlignToCellOffset();// 如果待建物是具有攻击范围或影响范围的,则显示范围指示器并设置半径为待建物的影响范围if (currentBuilding.canAttack){Instance.attackCircel.gameObject.SetActive(true);Instance.attackCircel.SetRadius(currentBuilding.AttackRadius);trans = Instance.attackCircel.transform;trans.SetParent(currentBuilding.transform);trans.localPosition = projectorOffset;}
}
然后就是建造检测逻辑:
private void Update()
{// 不在建造状态就返回if (currentBuilding is null || currentBuilding.IsBuilding){
#if DEBUG_MODDisplayDebugInfo();
#endifreturn;}// 按下右键就取消建造if (Input.GetMouseButtonDown(1)){CancelBuild();return;}// 不在UI上才建造if (EventSystem.current.IsPointerOverGameObject()){if (!Cursor.visible)Cursor.visible = true;return;}// 获取建造点if (!Physics.Raycast(mainCamera.ScreenPointToRay(Input.mousePosition), out RaycastHit hit, 100f,groundLayer.value)){if (!Cursor.visible)Cursor.visible = true;return;}if (Cursor.visible)Cursor.visible = false;// 按下R键就旋转待建物(换个朝向)if (Input.GetKeyDown(KeyCode.R))currentBuilding.NextRotation();// 获取地图格子索引var (x, y) = GetCellIndexByWorldPosition(hit.point);// 尝试放入待建物,如无法放置返回falseif (currentBuilding.CheckBuildingIndexPosOnGrid(x, y)){// 按下左键,准备结束建造if (Input.GetMouseButtonDown(0)){PrepareEndBuild();}}
}
检测能否放置在当前位置的方法如下:
public bool CheckBuildingIndexPosOnGrid(int x, int y)
{bool canBuild = true;// 根据朝向计算当前占用格子的宽度和高度// 比如:一个建筑物南北朝向放置时占用3*2个格子,但是东西朝向放置时将占用2*3个格子。var (w, h) = GetRealSizeWithDir();int dx = (w - 1) / 2;int dy = (h - 1) / 2;int sx = x - dx;int sy = y - dy;// 获取所占格子的平均地形高度float aheight = BuildManager.GetGridAverageHeight(sx, sy, w, h);string info = "超出范围";for (int px = sx; canBuild && px < sx + w; ++ px){// 判定x方向是否超出地图边界if (px < 0 || px >= BuildManager.gridSize.x){canBuild = false;break;}for (int py = sy; py < sy + h; ++py){// 判定z方向是否超出地图边界if (py < 0 || py >= BuildManager.gridSize.y){canBuild = false;break;}// 判定所占用的格子上是否已经存在其他建筑if (BuildManager.GetBuildingWithCell(px, py) is not null){canBuild = false;info = "已存在其他建筑";break;}// 判定格子地形高度与平均高度是否相差太多if (Mathf.Abs(aheight - BuildManager.GetCellHeight(px, py)) > 0.2f){canBuild = false;info = "地形不平";break;}// 判定格子坡度是否太陡if (BuildManager.GetCellStepness(px, py) > 3f){canBuild = false;info = "坡度太陡";break;}}}// 根据格子索引,获取世界坐标,并将其对齐到网格// AlignToCellOffset意义为:假设待建物体的中心点在物体的几何中心,那么,如果所占格子尺寸为奇数,// 则建筑是对称的,偏移为0;如果所占格子尺寸为偶数,则该建筑不是对称的,需要偏移半个单元格。var pos = BuildManager.GetCellWorldPosition(x, y) + AlignToCellOffset();// 如果能够在此处建造,则设置索引,并设置待建物材质为“绿色”,否则设置为“红色”。if (canBuild){_indexPos.x = sx;_indexPos.y = sy;_indexPos.width = w;_indexPos.height = h;preMaterial.SetColor(CommDefine.PrebuildColor, BuildManager.preBuildNormalColor); }else{preMaterial.SetColor(CommDefine.PrebuildColor, BuildManager.preBuildBadColor);InfoTips.Display(info, pos, 1.2f );}// 设置待建物的世界坐标transform.position = pos;return canBuild;
}
当按下鼠标,确定在此处建造时:
// 准备完成建造
private static void PrepareEndBuild()
{// 恢复鼠标显示if (!Cursor.visible)Cursor.visible = true;// 关闭网格显示、关闭范围指示,开始播放建造动画currentBuilding.EndBuild();Instance.buildLineDrawer.gameObject.SetActive(false);if(currentBuilding.canAttack)Instance.attackCircel.gameObject.SetActive(false);
}// 建造完成(建造动画播放完成)
private static void FinishBuild()
{// 实例化真正要建造的物体Building bd = currentBuilding.CreateBuilding();// 将建筑保存到网格中SaveCurrentBuilding(bd);// 置空currentcurrentBuilding = null;
}
网格及范围指示的绘制
因为地形是不平的,要在不平整的地面上完美的绘制网格和范围指示器,那用到了投影(贴花),然后投影材质使用了自己写的shader,很简单:
- 网格的Shader:
fixed4 frag(const v2f i) : SV_Target
{const float temp_output_2_0_g3 = 1 - _Width;const float2 appendResult10_g4 = float2(temp_output_2_0_g3, temp_output_2_0_g3);const float2 temp_output_11_0_g4 = abs(frac(i.uv0 * _ScaleOffset.xy + _ScaleOffset.zw) * 2.0 + -1.0) -appendResult10_g4;const float2 break16_g4 = 1.0 - temp_output_11_0_g4 / fwidth(temp_output_11_0_g4);float4 res = 1 - saturate(min(break16_g4.x, break16_g4.y)).xxxx;const float len = length(i.uv0 - float2(0.5,0.5));res *= step(len, 0.5);res *= smoothstep( 1-len, _min, _max);return res * _Color;
}
- 范围指示的Shader:
fixed4 frag(const v2f i) : SV_Target
{const float radius = _Radius * 0.5;const float width = _Width * 0.5;const float len = length(i.uv0 - float2(0.5,0.5));float4 res = step(len, radius);const float4 inner = step(len, radius - width);res -= inner;res *= _Color;return res;
}
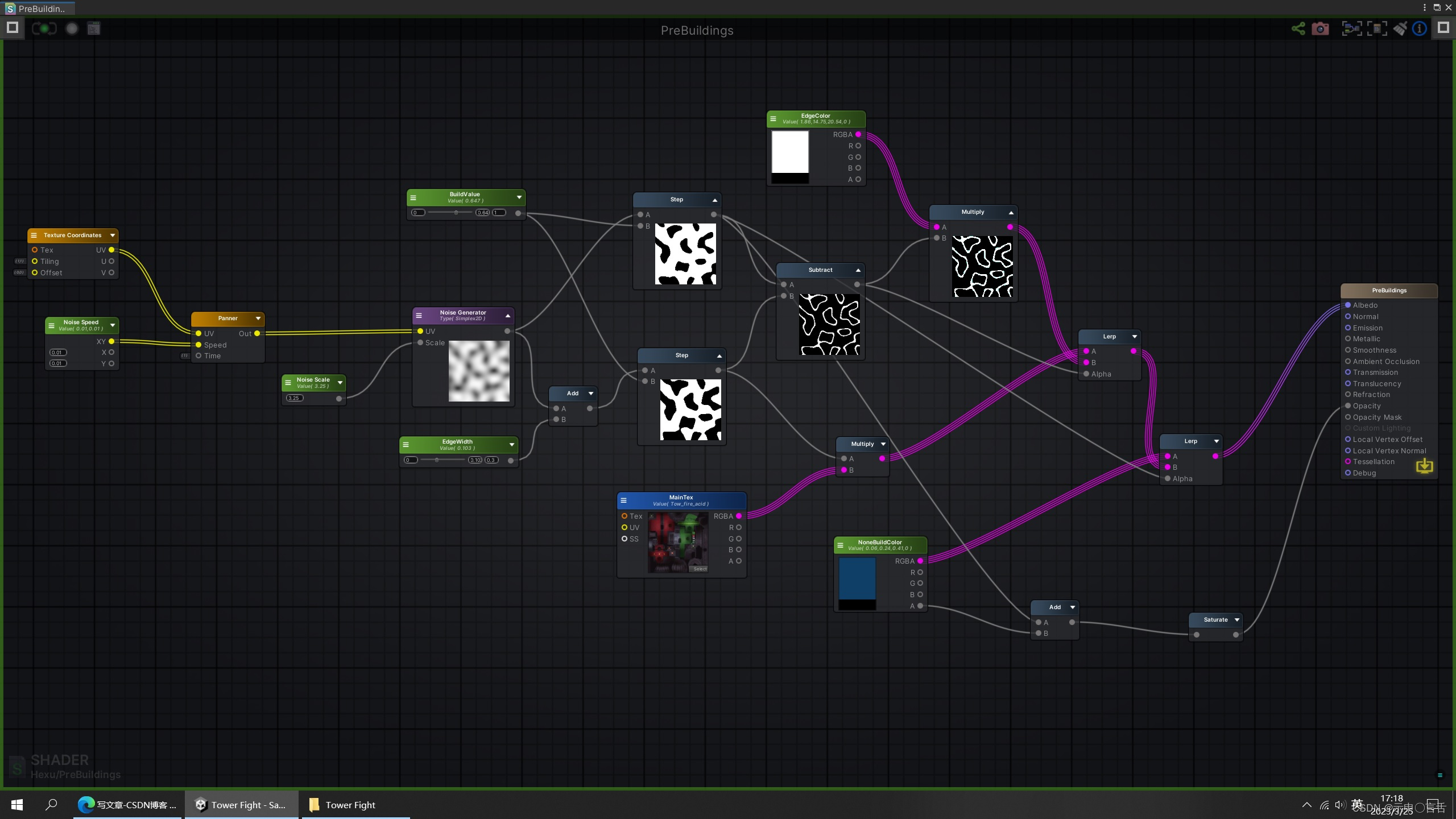
建造过程动画
由于缺乏美术资源,建造过程通过一个融合动画来展示建造过程,融合用ASE插件做的Shader:
相关文章:
Unity即时战略/塔防项目实战(一)——构造网格建造系统
Unity即时战略/塔防项目实战(一)—— 构造网格建造系统 效果展示 Unity RTS游戏网格建造系统实现原理 地形和格子划分,建造系统BuildManager构建 地形最终需要划分成一个一个的小方格,首先定义一下小方格: private…...
)
【ZOJ 1095】Humble Numbers 题解(动态规划)
一个素数只有2,3,5或7的数被称为谦逊数。序列1、2、3、4、5、6、7、8、9、10、12、14、15、16、18、20、21、24、25、27。。。显示了前20个不起眼的数字。 编写一个程序来查找并打印此序列中的第n个元素。 输入规范 输入由一个或多个测试用例组成。每个…...

百科媒体背书,什么媒体的收录可以修改百科?
传媒如春雨,润物细无声,大家好 大家都知道百科在百度搜索引擎中有很高的权重,排名非常靠前,任何机构,个人,或者企业做网络宣传百科是必不可少的,虽然任何人都可以注册并编辑其内容。但是&#x…...
)
USB鼠标实现——HID 报告的返回(八)
文章目录HID 报告的返回仓库地址USB 鼠标阅读顺序报告返回HID 报告的返回 仓库地址 仓库地址 USB 鼠标阅读顺序 枚举过程USB鼠标实现——设备描述符(一)USB鼠标实现——设置地址(二)USB鼠标实现——配置描述符集合(…...

DOPE PEG Maleimide,DOPE-PEG-Mal,二油酰磷脂酰乙醇胺PEG马来酰亚胺
文章关键词:高分子PEG,DOPE,聚乙二醇化修饰试剂基团反应特点: DOPE PEG Maleimide是一种由 DOPE 和马来酰亚胺基团组成的 PEG 化合物。基础产品数据: CAS号:N/A 中文名:1,2-二油酰-SN-甘油-3-磷…...

python-课后作业-2
1.Python 3.x的range()函数返回一个:可迭代的序列对象 注意: Python 3.x的range()函数返回一个可迭代的序列对象,其中包含指定范围内的整数。range()函数的语法如下: range([start], stop[, step]) 其中,start表示序…...

redis 六. list应用场景及底层分析
List 类型一. 简单命令示例二. java 操作示例三. 使用场景四. 底层分析一. 简单命令示例 1.首先简单说明: List是一个双端链表的结构,内容是2的32次方减1个元素,大概40多亿,主要功能有push/pop等,一般用在栈,队列,消息队列等场景 2.简单命令 //1.向列表左边添加元素 LPUSH ke…...

成语填字接龙隐私政策
1. 适用范围 (a) 在您注册本应用帐号时,您根据本应用要求提供的个人注册信息; (b) 在您使用本应用网络服务,或访问本应用平台网页时,本应用自动接收并记录的您的浏览器和计算机上的信息,包括但不限于您的IP地址、浏览…...

导出LKD3588开发板的根文件系统
序:将RK3588上的整个根文件系统的文件通过ssh拷贝到PC系统(虚拟机) 工具:RK3588上的ubuntu系统需要安装:ssh, rsync。 PC电脑(虚拟机)上安装:ssh, rsync。 安装ssh 和rsync不做介绍,百度里面全是,也很简单需要设置开发板root权限的密码,因为后面同步文件的时候会用到…...
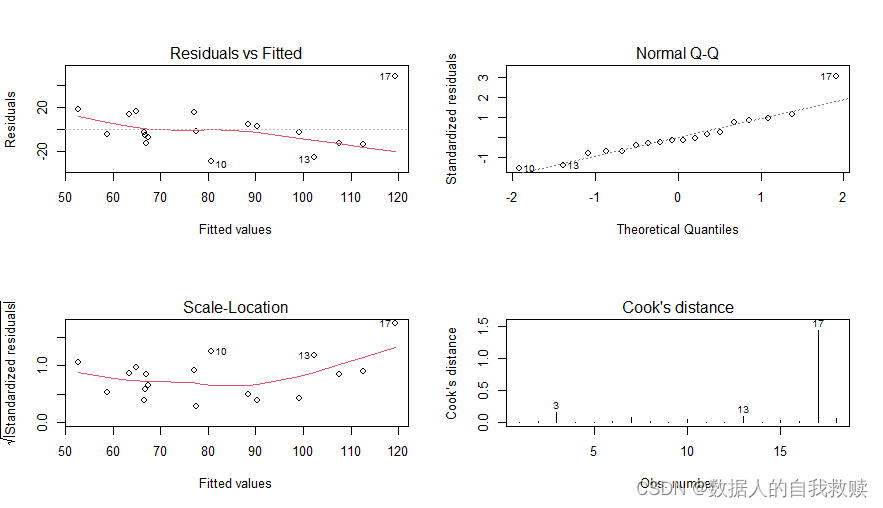
【统计模型】某地区土壤所含可给态磷回归分析
目录 某地区土壤所含可给态磷回归分析 一、研究目的 二、数据来源和相关说明 三、描述性分析 3.1 样本描述 3.2 数据可视化 四、数据建模 4.1 回归模型A 4.2 回归模型B 4.3 回归模型B模型诊断 4.4 回归模型C 五、结论及建议 5.1 结论 5.2 建议 六、代码 某地区土…...
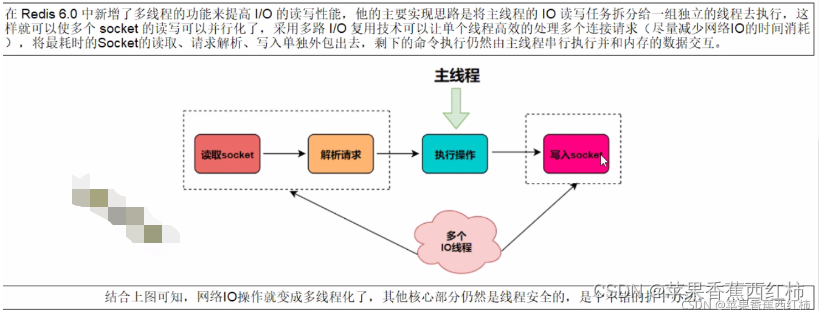
redis 十. 线程基础
目录一. redis 基础复习与了解redis6二. redis 线程问题总结一. redis 基础复习与了解redis6 redis官网, redis中文网站, redis命令参考网站此处以redis6.0.8或以上版本为例(查看自己redis版本命令"redis- server -v")按照redis6以上版本测试使用时,redis.conf下需要…...
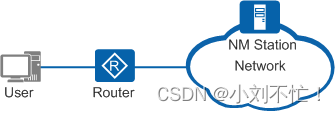
NQA简介
NQA简介定义目的NQA原理描述使用DHCP进行测试DNS测试NQA的联动机制NQA的应用场景定义 网络质量分析NQA(Network Quality Analysis)是一种实时的网络性能侦探和统计技术,可以对响应时间、网络抖动、丢包率等网络信息进行统计。NQA能够实时监视…...

[python]上下文管理contextlib模块与with语句
文章目录with语句自定义对象支持withcontextlib模块closing自动关闭suppress回避错误ExitStack清理Python 中的 with 语句用于清理工作,封装了 try…except…finally编码范式,提高了易用性。with语句 with语句有助于简化资源管理: # 离开作…...
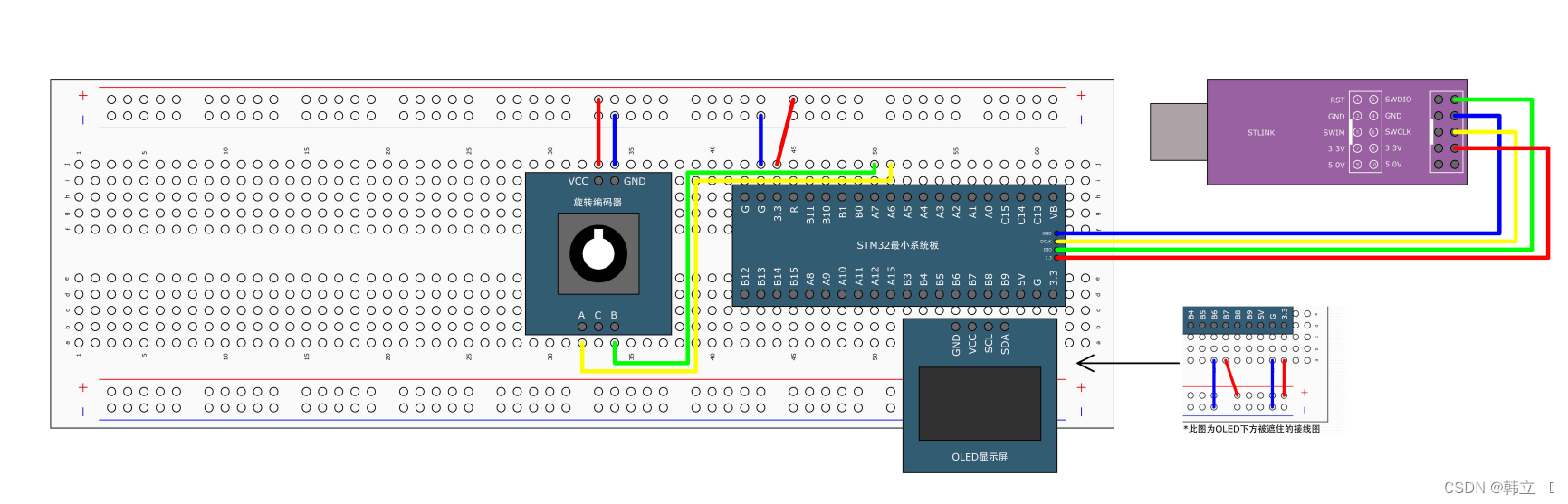
STM32之TIM编码器接口
编码器简介: 例子讲解:正交编码器有两个输出,一个A相,一个B相,AB接口输出正交信号。然后接入STM32的定时器的编码器接口,编码器接口自动控制定时器时基单元中的CNT计数器进行自增或自减,比如初始…...
b站第一,Python自动化测试实战详细教学,3天教你学会自动化测试
目录 简介 Python自动化测试概述 Python自动化测试目标 Python自动化测试流程 1. 测试计划和设计 2. 测试脚本开发 3. 测试执行和管理 4. 测试维护和优化 Python自动化测试最佳实践 Python自动化测试工具和框架 结论 简介 自动化测试是软件开发过程中一个必不可少的…...

刷题记录:P8804 [蓝桥杯 2022 国 B] 故障 条件概率
传送门:洛谷 题目描述: 题目较长,此处省略 输入: 3 5 30 20 50 0 50 33 25 0 30 0 35 0 0 0 0 0 25 60 1 3 输出: 2 56.89 1 43.11 3 0.00读完题目,我们会发现其实题目给了我们两个事件,并且这两个事件是相互关联的.因此不难想到使用条件概率 我们将故障原因看做事件AAA,结合…...

【算法】常用的基础数论
作者:指针不指南吗 专栏:算法篇 🐾或许会很慢,但是不可以停下🐾 文章目录1.GCD&LCM2.判断素数(质数)3.分解质因子1.GCD&LCM 最大公约数&最小共倍数 欧几里得算法——高效 //最大公约数 int gcd(int x,i…...

云原生场景下的容器网络隔离技术
云原生场景下的容器网络隔离技术 一、研究背景 随着云计算时代的到来,尤其是容器化技术的飞速发展,云原生作为云计算的未来阶段,其安全势必成为云安全的主要战场。从目前的云原生环境来看,云原生网络安全问题层出不穷࿰…...

用python绘制有向图
目录 添加边权重的有向图思路介绍代码实现效果图设置不同的样式节点和边的有向图思路介绍代码实现效果图下面的Python代码用于绘制有向图,其中使用了 networkx和 matplotlib.pyplot等库。 添加边权重的有向图 思路介绍 首先,创建了一个空的有向图像对象G,并添加了4个节点…...
—官方原版)
Spring MongoDB 开发教程(一)—官方原版
MongoDB支持包含一系列功能:Spring配置支持基于Java的configuration类或Mongo驱动程序实例和副本集的XML命名空间。MongoTemplate帮助类,在执行常见的Mongo操作时提高生产力。包括文档和POJO之间的集成对象映射。将异常转换为Spring的可移植数据访问异常…...

通过爱毕业AI的智能改写功能,五个方法助你快速降低论文重复率
嘿,大家好!我是AI菌。今天咱们来聊聊一个让无数学生头疼的问题:论文重复率飙到30%以上怎么办?别慌,我这就分享5个实用降重技巧,帮你一次搞定,轻松压到合格线以下。这些方法都是我亲身试验过的&a…...

2025 code-server 远程开发完全指南:7个技巧让你随时随地高效编码
2025 code-server 远程开发完全指南:7个技巧让你随时随地高效编码 【免费下载链接】code-server VS Code in the browser 项目地址: https://gitcode.com/GitHub_Trending/co/code-server 你是否曾因设备限制无法随时编写代码?是否希望在平板或低…...

超越矩阵SVD:T-SVD如何用傅里叶变换搞定三维数据补全?一个视频修复案例讲透
超越矩阵SVD:T-SVD如何用傅里叶变换搞定三维数据补全?一个视频修复案例讲透 当一段珍贵的历史视频出现帧丢失或噪声污染时,传统矩阵分解方法往往束手无策——它们将三维视频数据强行"压扁"成二维矩阵进行处理,破坏了时空…...

解决PyQtWebEngine安装难题:高效配置与常见问题排查
1. PyQtWebEngine安装问题全景分析 第一次接触PyQt5的开发者经常会遇到这样的报错:ModuleNotFoundError: No module named PyQt5.QtWebEngineWidgets。这个看似简单的错误背后,其实隐藏着PyQt5版本演进带来的架构变化。从PyQt5 5.12版本开始,…...

基于51单片机与HX711的智能电子秤Proteus仿真与计价系统实现
1. 项目背景与核心功能 最近在整理实验室材料时,发现很多同学对电子秤项目的仿真实现存在困惑。这个基于51单片机和HX711的智能电子秤系统,不仅能够完成基础称重,还能实现商品计价、LCD显示等完整超市电子秤功能。我在实际调试中发现…...

STM32duino ILPS22QS气压传感器驱动深度解析
1. 项目概述STM32duino ILPS22QS 是一个面向 STM32 平台的 Arduino 兼容库,专为意法半导体(STMicroelectronics)推出的超低功耗数字气压传感器 ILPS22QS 设计。该库并非通用传感器抽象层,而是深度适配 STM32 硬件生态的底层驱动实…...
)
【Android FWK】VR一体机全局菜单实战:从VirtualDisplay原理到系统级交互(上)
文章目录 一、从弹窗穿透到VR全局菜单 二、VirtualDisplay在VR中的适配原理 2.1 VR显示系统的特殊性 2.2 VR适配的核心代码 三、VR全局菜单的完整实现 3.1 系统架构设计 3.2 菜单呼出机制:手势+语音双重触发 3.3 菜单界面:适配VR的3D布局 3.4 系统交互:调节系统设置 四、VR环…...

浪潮 NF5270M4 装 ESXi 8.0 识别不到 RAID1?这样设置一次搞定
最近很多机友遇到了核心问题:RAID1 已创建,但 ESXi 8.0U3i 只看到两块独立 SATA 盘,没识别出 RAID 逻辑盘。这是浪潮 NF5270M4 ESXi 8.0 的典型兼容性 / 驱动 / 配置问题,按下面步骤排查即可解决。一、先确认核心前提(必做)1、你…...
)
手把手教你用GD32F30x的定时器搞定BLDC电机霍尔信号捕获(附完整代码)
手把手教你用GD32F30x的定时器实现BLDC电机霍尔信号精准捕获 当你的GD32F30x开发板已经连接好BLDC电机的霍尔传感器,却发现转速计算总是不准确时,问题往往出在定时器的配置细节上。本文将带你从寄存器层面拆解霍尔信号捕获的全流程,解决实际开…...

UMA模型吸附能预测实战指南:从催化剂筛选到工业应用
UMA模型吸附能预测实战指南:从催化剂筛选到工业应用 【免费下载链接】ocp Open Catalyst Projects library of machine learning methods for catalysis 项目地址: https://gitcode.com/GitHub_Trending/oc/ocp 核心价值速览 在催化材料研发领域࿰…...