智能车镜头组入门(四)元素识别
元素识别是摄像头部分中难度最大的一部分,也是我花时间最长的一部分,前前后后画了很长时间,最后还是勉勉强强完成了。
基础的元素识别主要有两个:十字,圆环,和斑马线。十字要求直行,圆环需要进圆环。我们的车在完全不写的情况下,十字可以猛冲过去,只是会非常抖。圆环不能进。
如果十字不能走直线的话,是直接判失败的,因为你抄了近路。圆环不能进入的话,是罚时30s的,我们这一年华南赛区一等奖是要在10s之内的,区2也要15s左右。所以如果你吃了这个罚时,基本上与区二无缘了。
前面我的推文提到过,我们在搜线搜完之后会额外出现两个数组,一个是左右边线的丢线数组,另一个是赛道宽度的数组。我们先对左右边线丢线数组进行处理:
loss_pointer_L = -1;loss_pointer_R = -1;if (loss_array[IMG_H - 1][0] == 1) {loss_array_L[++loss_pointer_L] = IMG_H - 1;}if (loss_array[IMG_H - 1][1] == 1) {loss_array_R[++loss_pointer_R] = IMG_H - 1;}for (int j = IMG_H - 1; j > IMG_H - max_length; j--) {if (loss_array[j - 1][0] == 1 && loss_array[j][0] == 0) { // headloss_array_L[++loss_pointer_L] = j;}if (loss_array[j - 1][0] == 0 && loss_array[j][0] == 1) { // endloss_array_L[++loss_pointer_L] = j - 1;loss_counter_L[loss_pointer_L / 2] = loss_array_L[loss_pointer_L - 1] - loss_array_L[loss_pointer_L];}if (loss_array[j - 1][1] == 1 && loss_array[j][1] == 0) { // headloss_array_R[++loss_pointer_R] = j;}if (loss_array[j - 1][1] == 0 && loss_array[j][1] == 1) { // endloss_array_R[++loss_pointer_R] = j - 1;loss_counter_R[loss_pointer_R / 2] = loss_array_R[loss_pointer_R - 1] - loss_array_R[loss_pointer_R];}}这其中,loss_array[IMG_H][2]中存的是丢线的数据,比如左边线的第100行丢线了,则loss_array[100][0] = 1。
这串代码的意图是把这个loss_array分成四个一维数组,分别为loss_array_L,loss_array_R,loss_counter_L,loss_counter_R。loss_array_L[]这个数组偶数存放的是左边线丢线的开始,奇数存放的是 左边线丢线的结束,loss_counter_L[]这个数组存放的是左边线丢线的个数。便于之后辨别元素。例如loss_array_L[0] = 75, loss_array_L[1] = 55,那么说明左边线的55行-75行存在丢线的情况,那么 loss_counter_L[0]的值则为20。
所需要的另一个数组则为宽度的计算
我们首先需要计算在大直道的情况下,如果把车至于赛道中央,顶端和最低端赛道的像素数量
for (i = IMG_H - 1; i >= 0; i--) {compared_array[i] = (HEAD_LENGTH + (END_LENGTH - HEAD_LENGTH) * (float)i / IMG_H) * ELEMENT_RATE;if (boundary_length[i] > compared_array[i]) {elem_array[i] = 1;}else {elem_array[i] = 0;}}这样我们可以计算出大直道上理论上的赛道宽度,如果大于这个宽度*ELEMENT_RATE,则有进元素的嫌疑。
之后我们还是像刚刚处理丢线的方式,来把丢线的长度入栈,
for (int j = ELEM_SEARCH_BEGIN; j > IMG_H - max_length; j--) {if (elem_array[j - 1] == 1 && elem_array[j] == 0) { // 开始elem[++elem_pointer] = j;line_L[elem_pointer] = abs(boundary[j][LEFT] - boundary[j - 1][LEFT]);line_R[elem_pointer] = abs(boundary[j][RIGHT] - boundary[j - 1][RIGHT]);}if (elem_array[j - 1] == 0 && elem_array[j] == 1) { // 结束elem[++elem_pointer] = j - 1;//结尾入栈elem_counter[elem_pointer / 2] = elem[elem_pointer - 1] - elem[elem_pointer];line_L[elem_pointer] = abs(boundary[j - 1][LEFT] - boundary[j][LEFT]);line_R[elem_pointer] = abs(boundary[j - 1][RIGHT] - boundary[j][RIGHT]);}}if (elem_array[1] == 1) { //如果图象底部缺线 则将底部入栈elem[++elem_pointer] = 1;elem_counter[elem_pointer / 2] = elem[elem_pointer - 1] - elem[elem_pointer];line_L[elem_pointer] = abs(boundary[1][LEFT] - boundary[0][LEFT]);line_R[elem_pointer] = abs(boundary[1][RIGHT] - boundary[0][RIGHT]);}这样,我们就完成了数据的预处理。
我们来具体分析下十字和圆环的特征。

 图片是选用逐飞对ccd组进行讲解的图,对上面的标号对镜头组其实不适用,可以忽略
图片是选用逐飞对ccd组进行讲解的图,对上面的标号对镜头组其实不适用,可以忽略
我们可以看出,临近十字有一条很长的直线,圆环的一侧是一条很长的直线,我们可以用这个来辅助判断圆环和十字的特征
然后圆环的入口和出口会有一个很大的丢线区域,十字中也会有一个很大的丢线区域
所以,我们需要一个函数来判断是否为直线
unsigned char is_straight(unsigned char begin, unsigned char end, line_type line);//直线判断函数我们的函数接受三个数据,读取boundary数组的line行,也就是确定左边线还是右边线。其他的有begin end 返回值是1或者0。
现在,我们来开始元素判断
if (mode == NORMAL && max_length > 95) {if (elem_pointer > 0) {i = 0;while (i <= elem_pointer && i < 10) {int lc = 0, rc = 0, llc = 0, rlc = 0, lcbegin = 0, rcbegin = 0;//l counter(long), l loss counterif(elem[i] - elem[i + 1] < 20) return;for(int a = 0; a < loss_pointer_L; a += 2){llc += loss_counter_L[a / 2];if(loss_counter_L[a / 2] > 25){lc++;lcbegin = loss_array_L[a];}}for(int b = 0; b < loss_pointer_R; b += 2){rlc += loss_counter_R[b / 2];if(loss_counter_R[b / 2] > 25){rc++;rcbegin = loss_array_R[b];}}这部分是基础的判断,把丢线再次分为了长丢线和短丢线,这是一个很方便的分辨圆环和十字的方式,即圆环为一边的长丢线,十字为两边都有长丢线。
先来进行圆环的判断,前面有提到,圆环的一个很显著的特征是一侧边线为直线,但是实际你的图象不可能特别完美,比如可能会出现这样的情况:

显然 左边线的处理会比较困难,另外,可能由于光照之类的因素,左边线并不是非常的完整的直线,所以需要将左边线简单的做一下分割,分段判断是否为直线,方式和前文提到的数据预处理相差不大
if(loss_array_R[0] == IMG_H - 1){//在底部丢线的情况下 排除底部for(int j = 1; j <= loss_pointer_R; j += 2){straight_judge_array[++straight_pointer] = loss_array_R[j];straight_judge_array[++straight_pointer] = loss_array_R[j + 1];if(loss_array_R[j + 1] < 20){straight_judge_array[straight_pointer] = 20;break;}}
}
else
{straight_judge_array[++straight_pointer] = IMG_H - 1;straight_judge_array[++straight_pointer] = loss_array_R[0];for(int j = 1; j <= loss_pointer_R; j += 2){straight_judge_array[++straight_pointer] = loss_array_R[j];straight_judge_array[++straight_pointer] = loss_array_R[j + 1];if(loss_array_R[j + 1] < 20){straight_judge_array[++straight_pointer] = 20;break;}}
}然后,进行数据的筛除,把那些特别小的段进行剔除,之后可以进行直线判断
for(int j = 1; j <= straight_pointer; j++){if(straight_pointer <= 2) break;if(straight_judge_array[j + 1] - straight_judge_array[j] > 5) flag = 0;if(abs(boundary[straight_judge_array[j + 1]][RIGHT] - boundary[straight_judge_array[j]][RIGHT])> 5) flag = 0;}
for(int j = 0; j <= straight_pointer; j += 2){if(!is_straight(straight_judge_array[j], straight_judge_array[j + 1], RIGHT)){flag = 0;break;}
}这样判断后,圆环基本上可以实现识别到圆环了
if(flag == 1){if(system_time - last_elem_finish_flag < 200) return;if(circle_num_L == 0){return;}else{mode = FAR_CIRCLE_L;}
}一种比较鸡贼的避免误判的方式 就是把根据赛道把圆环数量写死,也就是代码中的circle_num_L,需要注意每一次发车的时候都需要重置这个值
当然还有一些比较特殊的情况,需要另外加判断去屏蔽,这些需要大家跑车的时候多去试试。
圆环是误判最麻烦的一部分,因为圆环分成了好几个状态,每个状态都需要不同的补线方式,我们采用的出圆环的方式是陀螺仪的积分,这样就要求小车必须转一圈才会出圆环,所以一旦误判圆环就会造成直接的错误。
接下去是十字识别
if(lc && rc){if(abs(lcbegin - rcbegin) > 20) return;l_down = elem[i]; r_down = elem[i];l_up = elem[i + 1]; r_up = elem[i + 1];for(int k = 10; k >= 0; k = k - 2){if(k > loss_pointer_L) continue;if(elem[i] - 3 < loss_array_L[k] && loss_counter_L[k / 2] > 5 && loss_array_L[k] != IMG_H - 1){l_down = loss_array_L[k] + 3;l_up = loss_array_L[k + 1] - 7;break;}}for(int k = 10; k >= 0; k = k - 2){if(k > loss_pointer_R) continue;if(elem[i] - 3 < loss_array_R[k] && loss_counter_R[k / 2] > 5 && loss_array_R[k] != IMG_H - 1){int a;r_down = loss_array_R[k] + 3;for(int b = 7; b < 13; b++){if(boundary[loss_array_R[k + 1] - b][RIGHT] < IMG_W - 5){r_up = loss_array_R[k + 1] - b;break;}}break;}}if(is_straight( l_down, l_down + 15, LEFT) && is_straight( r_down, r_down + 15, RIGHT)){mode = FAR_CROSS;return;}}十字识别相对来说简单些,两边都有长丢线:两边丢线到底端都是直线,而且直线误判也没关系,状态机会很快的恢复到正常模式,也不用单独调整权重。所以我们并没有在直线判断上下很多功夫
相关文章:
智能车镜头组入门(四)元素识别
元素识别是摄像头部分中难度最大的一部分,也是我花时间最长的一部分,前前后后画了很长时间,最后还是勉勉强强完成了。 基础的元素识别主要有两个:十字,圆环,和斑马线。十字要求直行,圆环需要进…...

Java键盘输入语句
编程输入语句 1.介绍:在编程中,需要接受用户输入的数据,就可以使用键盘输入语句来获取。 2.步骤: 1)导入该类的所在包,java.util.* 2)创建该类对象(声明变量) 3)调用里面的功能 3…...

【读书笔记-《30天自制操作系统》-22】Day23
本篇内容比较简单,集中于显示问题。首先编写了应用程序使用的api_malloc,然后实现了在窗口中画点与画线的API与应用程序。有了窗口显示,还要实现关闭窗口的功能,于是在键盘输入API的基础上实现了按下按键关闭窗口。最后发现用上文…...
)
C++学习笔记(33)
三十五、栈 示例: #include <iostream> using namespace std; typedef int ElemType; // 自定义链栈的数据元素为整数。 struct SNode // 链栈的结点。 { ElemType data; // 存放结点的数据元素。 struct SNode* next; // 指向下一个结点的指针。 }; // 初始化…...

智谱清影 -CogVideoX-2b-部署与使用,带你揭秘生成6s视频的极致体验!
文章目录 1 效果展示2 CogVideoX 前世今生3 CogVideoX 部署实践流程3.1 创建丹摩实例3.2 配置环境和依赖3.3 模型与配置文件3.4 运行4 遇到问题 1 效果展示 A street artist, clad in a worn-out denim jacket and a colorful bandana, stands before a vast concrete wall in …...

探索Java中的设计模式:原则与实例
探索Java中的设计模式:原则与实例 大家好,我是微赚淘客系统3.0的小编,是个冬天不穿秋裤,天冷也要风度的程序猿!今天,我们将深入探讨Java中的设计模式,包括一些关键的设计原则和具体的实例。设计…...

【Java】关键字-static【主线学习笔记】
文章目录 前言关键字:static静态变量静态方法设置为静态的场景 下一篇 前言 Java是一门功能强大且广泛应用的编程语言,具有跨平台性和高效的执行速度,广受开发者喜爱。在接下来的学习过程中,我将记录学习过程中的基础语法、框架和…...
数字自然资源领域的实现路径
在数字化浪潮的推动下,自然资源的管理与利用正经历着前所未有的变革。本文将从测绘地理信息与遥感专业的角度,深度分析数字自然资源领域的实现路径。 1. 基础数据的数字化 数字自然资源的构建,首先需要实现基础数据的数字化。这包括地形地貌…...

GitLab邮箱发送邮件:如何实现自动化发信?
gitlab邮箱发送邮件设置教程?Gitlab邮箱配置和使用? GitLab不仅提供了代码版本控制、持续集成/持续部署等功能,还支持通过其内置的邮件功能实现自动化邮件发送。AokSend将深入探讨如何在GitLab中配置和使用邮箱发送邮件功能。 GitLab邮箱发…...
sqli-labs靶场搭建
下载了一个phpstudy进行搭靶场搭建 然后打开phpstudy安装好php,mysql等环境 正式sqli-labs靶场搭建 第一步:下载源码:https://codeload.github.com/Audi-1/sqli-labs/zip/master 解压后放进网站根目录,进到 sqli-labs的文件夹下࿰…...

Leetcode Hot 100刷题记录 -Day14(矩阵置0)
矩阵置0 问题描述: 给定一个 m x n 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0。 示例 1: 输入:matrix [[1,1,1],[1,0,1],[1,1,1]] 输出:[[1,0,1],[0,0,0],[1,0,1]]示例 2:…...

每日刷题(算法)
我们N个真是太厉害了 思路: 我们先给数组排序,如果最小的元素不为1,那么肯定是吹牛的,我们拿一个变量记录前缀和,如果当前元素大于它前面所有元素的和1,那么sum1是不能到达的值。 代码: #def…...

大牛直播SDK核心音视频模块探究
技术背景 视沃科技旗下”大牛直播SDK”,始于2015年,致力于传统行业极致体验的音视频直播技术解决方案,产品涵盖跨平台的实时RTMP推流、RTMP/RTSP直播播放(支持RTSP|RTMP H.265,Enhanced RTMP H.265)、GB28181设备接入、推送端播放…...

gin配置swagger文档
一、基本准备工作 1、安装依赖包 go get -u github.com/swaggo/swag/cmd/swag go get -u github.com/swaggo/gin-swagger go get -u github.com/swaggo/files2、在根目录上配置swagger的路由文件 //2.初始化路由router : initialize.Routers()// 配置swaggerdocs.SwaggerInfo…...

基于ssm的快餐店点餐系统设计与实现
需要项目源码请联系我,目前有各类成品 毕设 javaweb ssh ssm springboot等等项目框架,源码丰富。 专业团队,咨询就送开题报告,活动限时免费,有需要的朋友可以来留言咨询。 一、摘要 进入二十一世纪以来,计…...

集合框架底层使用了什么数据结构
1.是什么 集合框架(Collection Framework)是Java标准库的一部分,它提供了一系列接口和实现类,用于处理不同类型的集合。这些集合可以用于存储和操作对象,如列表、集合、映射等。集合框架的底层数据结构是多种多样的&am…...

Activiti7《第二式:破剑式》——工作流中的以柔克刚
冲冲冲!开干 这篇文章将分为九个篇章,带你逐步掌握工作流的核心知识。这篇文章将带你深入探讨工作流中的 “破剑式”,揭示如何通过 柔与刚 的结合来破解工作流的复杂性。本篇包含了 Activiti7 环境的进一步优化和表结构的深入分析࿰…...

docker快速搭建kafka
1、拉取镜像 kafka和 zk镜像 docker pull wurstmeister/zookeeper docker pull wurstmeister/kafka:1.1.02、运行zk容器 docker run -itd --restart always --name zookeeper -p 2181:2181 wurstmeister/zookeeper3、运行kafka容器 192.168.31.112 这个地址为zk地址 docker…...
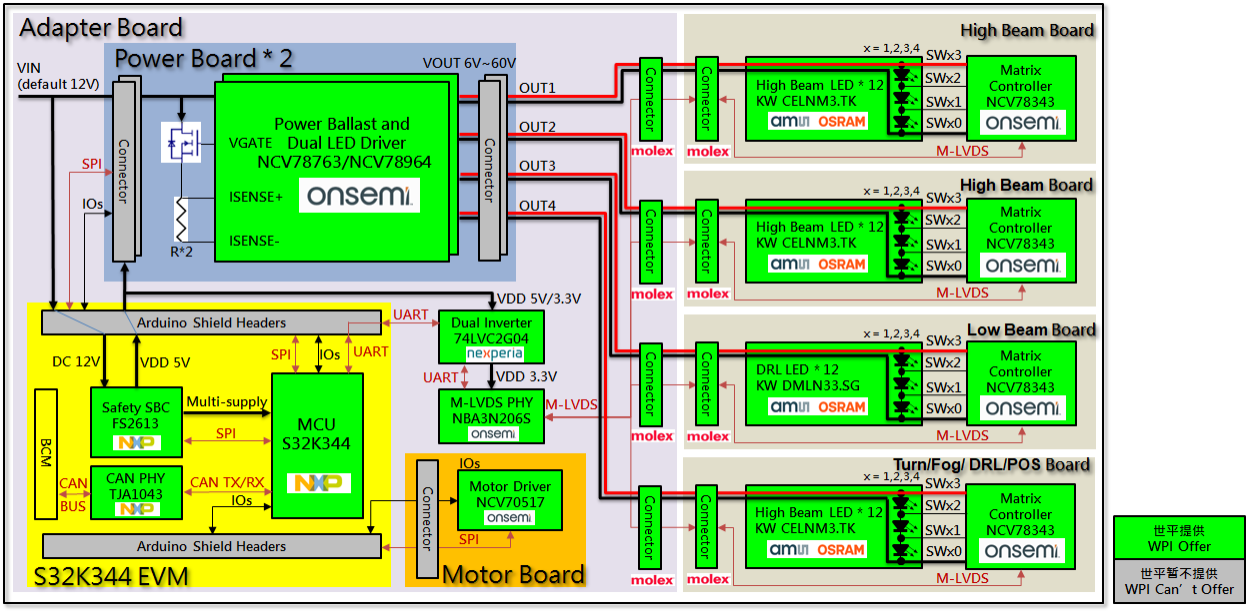
基于 onsemi NCV78343 NCV78964的汽车矩阵式大灯方案
一、方案描述 大联大世平集团针对汽车矩阵大灯,推出 基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案。 开发板搭载的主要器件有 onsemi 的 Matrix Controller NCV78343、LED Driver NCV78964、Motor Driver NCV70517、以及 NXP 的 MCU S32K344。 二、开…...

OpenAl o1论文:Let’s Verify Step by Step 快速解读
OpenAl又火了,这次是o1又带给大家惊艳。网上的博主已经有了真真假假的各种评测,我这篇来一点硬核的,解读OpenAl o1背后的论文:Let’s Verify Step by Step 大模型在给定的上下文资料正确的情况下也有可能出现幻觉,这篇…...

Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南
Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南 【免费下载链接】Qwen3-Coder-30B-A3B-Instruct-FP8 项目地址: https://ai.gitcode.com/hf_mirrors/Qwen/Qwen3-Coder-30B-A3B-Instruct-FP8 在当今AI代码生成领域,Qwen3-Coder-30B-…...

零基础轻松拿捏!魔珐星云青少年健康运动教学数字人搭建全流程指南
大家好!本次给大家分享一款面向青少年体育教育的AI创意实践项目——青少年健康运动教学智能数字交互系统。本项目聚焦青少年体质健康痛点,围绕体育教学智能化升级需求,打造集健康知识教学、运动动作陪练、健康知识考核、运动能力评测于一体的…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

亚马逊卖家公开信息数据提取:反爬攻防战与 Python 批量采集实战
摘要: 批量获取亚马逊(Amazon)第三方卖家的商业名称、信用代码和注册地址等信息,对于跨境 B2B 拓客和供应链分析具有重要意义。然而,亚马逊的 Cloudflare 盾和 Robot 验证码构成了极高的反爬门槛。本文将深度解析亚马逊…...

用STM32CubeMX和HAL库快速上手WS2812B:告别手动计算延时,一键生成驱动框架
基于STM32CubeMX的WS2812B智能灯光控制:从零构建现代化驱动方案在智能硬件和物联网设备快速发展的今天,WS2812B可编程LED灯带因其丰富的色彩表现和简单的单线控制方式,成为创客和工程师们最喜爱的显示组件之一。然而,传统的寄存器…...

Yokogawa AAI835-H50/K4A00模拟输入/输出模块
Yokogawa AAI835-H50/K4A00 模拟输入/输出模块产品特点:通道配置:共8个通道,含4路模拟输入和4路模拟输出。信号类型:所有通道均支持4-20mA标准电流信号。HART通信:支持HART协议,可与智能现场设备双向数字通…...

微信小程序3D开发框架技术对比:XR-Frame与threejs-miniprogram
随着微信小程序逐步支持3D渲染与AR能力,开发者面临两个主要官方方案:自研的XR-Frame和适配Three.js的threejs-miniprogram。本文将从架构设计、渲染机制、功能集成、开发模式及适用场景等维度进行技术分析,为技术选型提供参考。一、XR-Frame&…...

浏览器 Profile 环境排查:Cookie、LocalStorage、网络出口与自动化任务配置清单
一、为什么浏览器环境经常“今天能用,明天失效”很多团队遇到登录状态丢失、页面配置异常、自动化任务失败时,会先怀疑网络、脚本或系统本身。但在实际项目里,问题经常不是单点故障,而是浏览器环境缺少稳定管理:对象常…...

Vulnhub-DC-1
1.信息收集 使用工具nmap扫描主机端口 这是Drupal是使用PHP语言编写的开源内容管理框架(CMF),它由内容管理系统(CMS)和PHP开发框架(Framework)共同构成 Web指纹扫描 发现是:drupal…...

金融合规审核为何人力堆积却仍漏洞百出?2026年RegTech演进与Agent全链路闭环解决方案
在2026年的金融监管环境下,合规审核已不再是简单的“查漏补缺”,而是演变为一场高强度的算力与逻辑博弈。尽管金融机构在合规成本上的投入逐年攀升,甚至不惜以“人海战术”填补流程断点,但监管罚单的数额与频率却并未显著下降。这…...