Ceres简介及示例(4)Curve Fitting(曲线拟合)
文章目录
- 1、Curve Fitting
- 1.1、残差定义
- 1.2、 Problem问题构造
- 1.3、完整代码
- 1.4、运行结果
- 2、Robust Curve Fitting
1、Curve Fitting
到目前为止,我们看到的示例都是没有数据的简单优化问题。最小二乘和非线性最小二乘分析的原始目的是对数据进行曲线拟合。
以一个简单的曲线拟合的问题为例。采样点是根据曲线 y=e0.3x+0.1y = e^{0.3x + 0.1}y=e0.3x+0.1 生成,并且添加标准差 σ=0.2σ=0.2σ=0.2 的高斯噪声。我们用下列带未知参数的方程来拟合这些采样点:y=emx+c.y = e^{mx + c}.y=emx+c.
1.1、残差定义
首先定义一个模板对象来计算残差。每一个观察值(采样点)都有一个残差,
struct ExponentialResidual {ExponentialResidual(double x, double y): x_(x), y_(y) {}template <typename T>bool operator()(const T* const m, const T* const c, T* residual) const {residual[0] = y_ - exp(m[0] * x_ + c[0]);return true;}private:// Observations for a sample.const double x_;const double y_;
};
1.2、 Problem问题构造
假设观测数据是一个名为data的2n大小的的数组,为每一个观察值创建一个CostFunction的问题(problem)构造是一个简单的事。
double m = 0.0;
double c = 0.0;Problem problem;
for (int i = 0; i < kNumObservations; ++i) {CostFunction* cost_function =new AutoDiffCostFunction<ExponentialResidual, 1, 1, 1>(new ExponentialResidual(data[2 * i], data[2 * i + 1]));problem.AddResidualBlock(cost_function, nullptr, &m, &c);
}
*/
与Hello World的f(x)=10−x对比:
struct CostFunctor {template <typename T>bool operator()(const T* const x, T* residual) const {residual[0] = T(10.0) - x[0];return true;}
};
CostFunction* cost_function =new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
problem.AddResidualBlock(cost_function, NULL, &x);
对比结果:
- 1.在Hello World中,CostFunctor中是没有(显式)构造函数的,也就同样没有了初始值。所以在构造对象时,可以直接New CostFunctor。而在本节的例子中,构造对象时还要加上初始值,即
new ExponentialResidual(data[2 * i], data[2 * i + 1])); - 2.在AutoDiffCostFunction的模板中,本例中一共有三个1,而在Hello World中,只有两个1,即residual和x的维度。注意先是残差,后是输入参数,而且一一对应。
1.3、完整代码
// Ceres Solver - A fast non-linear least squares minimizer
// Copyright 2015 Google Inc. All rights reserved.
// http://ceres-solver.org/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions are met:
//
// * Redistributions of source code must retain the above copyright notice,
// this list of conditions and the following disclaimer.
// * Redistributions in binary form must reproduce the above copyright notice,
// this list of conditions and the following disclaimer in the documentation
// and/or other materials provided with the distribution.
// * Neither the name of Google Inc. nor the names of its contributors may be
// used to endorse or promote products derived from this software without
// specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
// AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
// IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
// ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
// LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
// CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
// SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
// INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
// CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
// ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
// POSSIBILITY OF SUCH DAMAGE.
//
// Author: sameeragarwal@google.com (Sameer Agarwal)#include "ceres/ceres.h"
#include "glog/logging.h"using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solver;
using ceres::Solve;// Data generated using the following octave code.
// randn('seed', 23497);
// m = 0.3;
// c = 0.1;
// x=[0:0.075:5];
// y = exp(m * x + c);
// noise = randn(size(x)) * 0.2;
// y_observed = y + noise;
// data = [x', y_observed'];const int kNumObservations = 67;
const double data[] = {0.000000e+00, 1.133898e+00,7.500000e-02, 1.334902e+00,1.500000e-01, 1.213546e+00,2.250000e-01, 1.252016e+00,3.000000e-01, 1.392265e+00,3.750000e-01, 1.314458e+00,4.500000e-01, 1.472541e+00,5.250000e-01, 1.536218e+00,6.000000e-01, 1.355679e+00,6.750000e-01, 1.463566e+00,7.500000e-01, 1.490201e+00,8.250000e-01, 1.658699e+00,9.000000e-01, 1.067574e+00,9.750000e-01, 1.464629e+00,1.050000e+00, 1.402653e+00,1.125000e+00, 1.713141e+00,1.200000e+00, 1.527021e+00,1.275000e+00, 1.702632e+00,1.350000e+00, 1.423899e+00,1.425000e+00, 1.543078e+00,1.500000e+00, 1.664015e+00,1.575000e+00, 1.732484e+00,1.650000e+00, 1.543296e+00,1.725000e+00, 1.959523e+00,1.800000e+00, 1.685132e+00,1.875000e+00, 1.951791e+00,1.950000e+00, 2.095346e+00,2.025000e+00, 2.361460e+00,2.100000e+00, 2.169119e+00,2.175000e+00, 2.061745e+00,2.250000e+00, 2.178641e+00,2.325000e+00, 2.104346e+00,2.400000e+00, 2.584470e+00,2.475000e+00, 1.914158e+00,2.550000e+00, 2.368375e+00,2.625000e+00, 2.686125e+00,2.700000e+00, 2.712395e+00,2.775000e+00, 2.499511e+00,2.850000e+00, 2.558897e+00,2.925000e+00, 2.309154e+00,3.000000e+00, 2.869503e+00,3.075000e+00, 3.116645e+00,3.150000e+00, 3.094907e+00,3.225000e+00, 2.471759e+00,3.300000e+00, 3.017131e+00,3.375000e+00, 3.232381e+00,3.450000e+00, 2.944596e+00,3.525000e+00, 3.385343e+00,3.600000e+00, 3.199826e+00,3.675000e+00, 3.423039e+00,3.750000e+00, 3.621552e+00,3.825000e+00, 3.559255e+00,3.900000e+00, 3.530713e+00,3.975000e+00, 3.561766e+00,4.050000e+00, 3.544574e+00,4.125000e+00, 3.867945e+00,4.200000e+00, 4.049776e+00,4.275000e+00, 3.885601e+00,4.350000e+00, 4.110505e+00,4.425000e+00, 4.345320e+00,4.500000e+00, 4.161241e+00,4.575000e+00, 4.363407e+00,4.650000e+00, 4.161576e+00,4.725000e+00, 4.619728e+00,4.800000e+00, 4.737410e+00,4.875000e+00, 4.727863e+00,4.950000e+00, 4.669206e+00,
};struct ExponentialResidual {ExponentialResidual(double x, double y): x_(x), y_(y) {}template <typename T> bool operator()(const T* const m,const T* const c,T* residual) const {residual[0] = y_ - exp(m[0] * x_ + c[0]);return true;}private:const double x_;const double y_;
};int main(int argc, char** argv) {google::InitGoogleLogging(argv[0]);double m = 0.0;double c = 0.0;Problem problem;for (int i = 0; i < kNumObservations; ++i) {problem.AddResidualBlock(new AutoDiffCostFunction<ExponentialResidual, 1, 1, 1>(new ExponentialResidual(data[2 * i], data[2 * i + 1])),NULL,&m, &c);}Solver::Options options;options.max_num_iterations = 25;options.linear_solver_type = ceres::DENSE_QR;options.minimizer_progress_to_stdout = true;Solver::Summary summary;Solve(options, &problem, &summary);std::cout << summary.BriefReport() << "\n";std::cout << "Initial m: " << 0.0 << " c: " << 0.0 << "\n";std::cout << "Final m: " << m << " c: " << c << "\n";return 0;
}
1.4、运行结果
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time0 1.211734e+02 0.00e+00 3.61e+02 0.00e+00 0.00e+00 1.00e+04 0 1.84e-03 2.30e-031 2.334822e+03 -2.21e+03 0.00e+00 7.52e-01 -1.87e+01 5.00e+03 1 7.51e-04 3.41e-032 2.331438e+03 -2.21e+03 0.00e+00 7.51e-01 -1.86e+01 1.25e+03 1 3.35e-04 3.82e-033 2.311313e+03 -2.19e+03 0.00e+00 7.48e-01 -1.85e+01 1.56e+02 1 3.31e-04 4.22e-034 2.137268e+03 -2.02e+03 0.00e+00 7.22e-01 -1.70e+01 9.77e+00 1 3.32e-04 4.62e-035 8.553131e+02 -7.34e+02 0.00e+00 5.78e-01 -6.32e+00 3.05e-01 1 3.30e-04 5.02e-036 3.306595e+01 8.81e+01 4.10e+02 3.18e-01 1.37e+00 9.16e-01 1 1.95e-03 7.04e-037 6.426770e+00 2.66e+01 1.81e+02 1.29e-01 1.10e+00 2.75e+00 1 2.03e-03 9.14e-038 3.344546e+00 3.08e+00 5.51e+01 3.05e-02 1.03e+00 8.24e+00 1 4.12e-03 1.34e-029 1.987485e+00 1.36e+00 2.33e+01 8.87e-02 9.94e-01 2.47e+01 1 2.04e-03 1.55e-0210 1.211585e+00 7.76e-01 8.22e+00 1.05e-01 9.89e-01 7.42e+01 1 1.96e-03 1.76e-0211 1.063265e+00 1.48e-01 1.44e+00 6.06e-02 9.97e-01 2.22e+02 1 1.97e-03 1.96e-0212 1.056795e+00 6.47e-03 1.18e-01 1.47e-02 1.00e+00 6.67e+02 1 1.97e-03 2.17e-0213 1.056751e+00 4.39e-05 3.79e-03 1.28e-03 1.00e+00 2.00e+03 1 1.96e-03 2.40e-02
Ceres Solver Report: Iterations: 14, Initial cost: 1.211734e+02, Final cost: 1.056751e+00, Termination: CONVERGENCE
Initial m: 0 c: 0
Final m: 0.291861 c: 0.131439
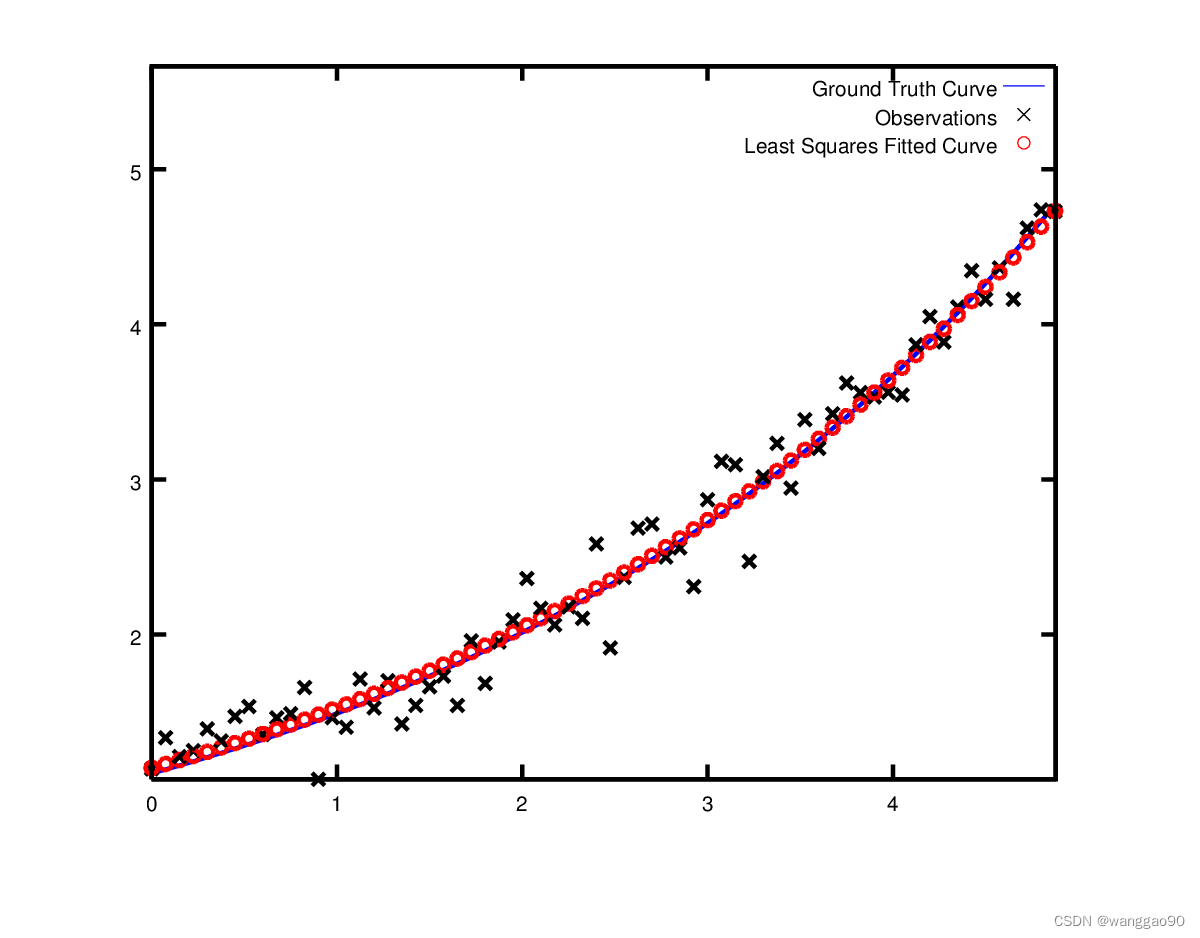
参数的初始值为m=0,c=0,初始代价函数为121.173。最后的解是m=0.291861,c=0.131439,代价是1.05675。
这个结果和期望解m=0.3,c=0.1有一些细微的差别,但是是合理的(因为添加了高斯噪声)。当从噪声数据重建曲线时,我们预计会看到这样的偏差。
实际上,如果您要对m=0.3,c=0.1的目标函数进行评估,那么当目标函数值为1.082425时,拟合效果会更差。下图说明了适合度。
2、Robust Curve Fitting
现在假设我们给出的数据有一些异常值(离群点/外点),也就是说,我们有一些点不服从噪声模型,继续使用上面的代码来拟合这些数据,我们将得到拟合曲线是偏离实际预期。
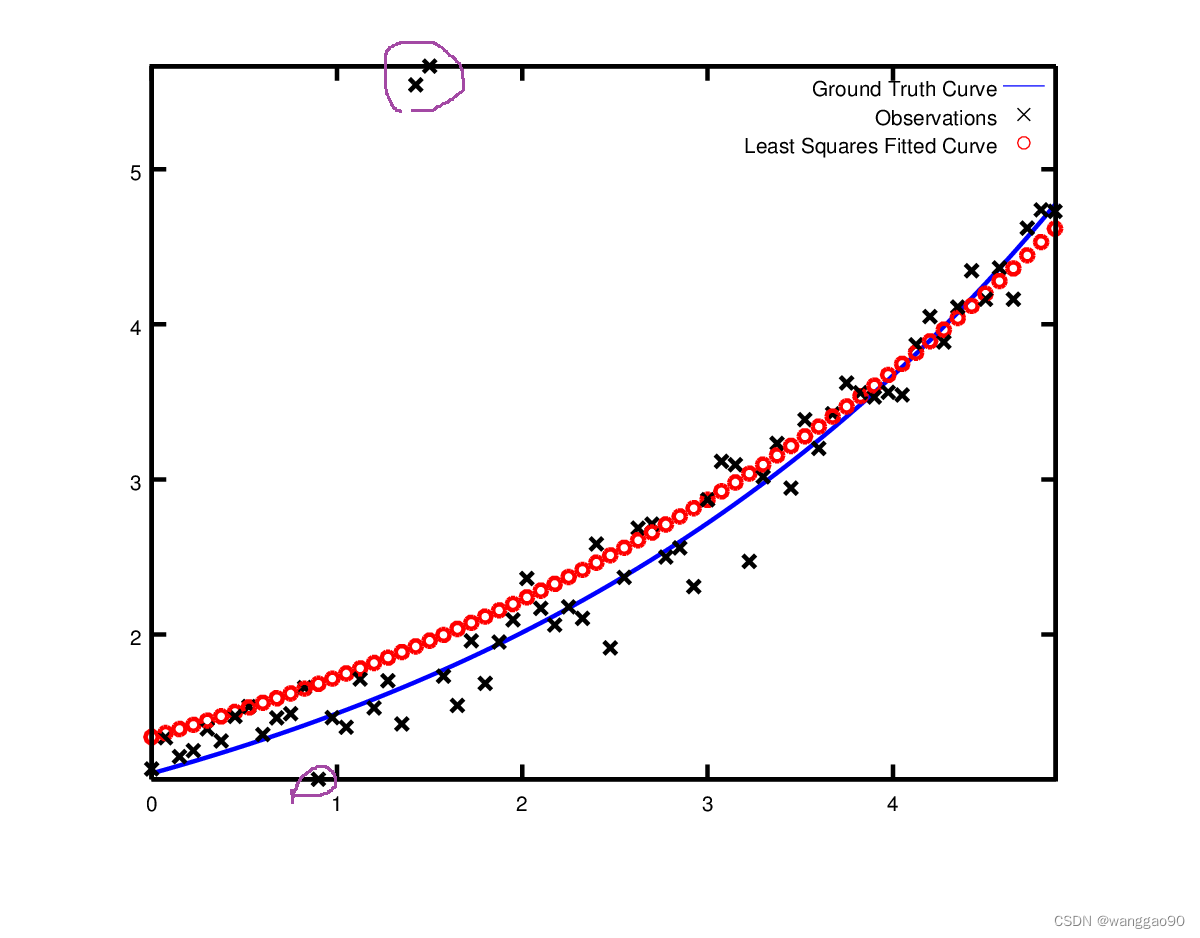
处理异常值的标准方法是使用LossFunction。损失函数降低了残差高的残差块(通常是与异常值对应的残差块)的影响。为了将损失函数与残差块联系起来,我们改变
// problem.AddResidualBlock(cost_function, nullptr , &m, &c);problem.AddResidualBlock(cost_function, new CauchyLoss(0.5) , &m, &c);
这里使用SizedCostFunction类,需要填写计算jacobians。完整代码如下
#include "ceres/ceres.h"
#include "glog/logging.h"// Data generated using the following octave code.
// randn('seed', 23497);
// m = 0.3;
// c = 0.1;
// x=[0:0.075:5];
// y = exp(m * x + c);
// noise = randn(size(x)) * 0.2;
// outlier_noise = rand(size(x)) < 0.05;
// y_observed = y + noise + outlier_noise;
// data = [x', y_observed'];const int kNumObservations = 67;
const double data[] = {
0.000000e+00, 1.133898e+00,
7.500000e-02, 1.334902e+00,
1.500000e-01, 1.213546e+00,
2.250000e-01, 1.252016e+00,
3.000000e-01, 1.392265e+00,
3.750000e-01, 1.314458e+00,
4.500000e-01, 1.472541e+00,
5.250000e-01, 1.536218e+00,
6.000000e-01, 1.355679e+00,
6.750000e-01, 1.463566e+00,
7.500000e-01, 1.490201e+00,
8.250000e-01, 1.658699e+00,
9.000000e-01, 1.067574e+00,
9.750000e-01, 1.464629e+00,
1.050000e+00, 1.402653e+00,
1.125000e+00, 1.713141e+00,
1.200000e+00, 1.527021e+00,
1.275000e+00, 1.702632e+00,
1.350000e+00, 1.423899e+00,
1.425000e+00, 5.543078e+00, // Outlier point
1.500000e+00, 5.664015e+00, // Outlier point
1.575000e+00, 1.732484e+00,
1.650000e+00, 1.543296e+00,
1.725000e+00, 1.959523e+00,
1.800000e+00, 1.685132e+00,
1.875000e+00, 1.951791e+00,
1.950000e+00, 2.095346e+00,
2.025000e+00, 2.361460e+00,
2.100000e+00, 2.169119e+00,
2.175000e+00, 2.061745e+00,
2.250000e+00, 2.178641e+00,
2.325000e+00, 2.104346e+00,
2.400000e+00, 2.584470e+00,
2.475000e+00, 1.914158e+00,
2.550000e+00, 2.368375e+00,
2.625000e+00, 2.686125e+00,
2.700000e+00, 2.712395e+00,
2.775000e+00, 2.499511e+00,
2.850000e+00, 2.558897e+00,
2.925000e+00, 2.309154e+00,
3.000000e+00, 2.869503e+00,
3.075000e+00, 3.116645e+00,
3.150000e+00, 3.094907e+00,
3.225000e+00, 2.471759e+00,
3.300000e+00, 3.017131e+00,
3.375000e+00, 3.232381e+00,
3.450000e+00, 2.944596e+00,
3.525000e+00, 3.385343e+00,
3.600000e+00, 3.199826e+00,
3.675000e+00, 3.423039e+00,
3.750000e+00, 3.621552e+00,
3.825000e+00, 3.559255e+00,
3.900000e+00, 3.530713e+00,
3.975000e+00, 3.561766e+00,
4.050000e+00, 3.544574e+00,
4.125000e+00, 3.867945e+00,
4.200000e+00, 4.049776e+00,
4.275000e+00, 3.885601e+00,
4.350000e+00, 4.110505e+00,
4.425000e+00, 4.345320e+00,
4.500000e+00, 4.161241e+00,
4.575000e+00, 4.363407e+00,
4.650000e+00, 4.161576e+00,
4.725000e+00, 4.619728e+00,
4.800000e+00, 4.737410e+00,
4.875000e+00, 4.727863e+00,
4.950000e+00, 4.669206e+00
};using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::CauchyLoss;
using ceres::Problem;
using ceres::Solve;
using ceres::Solver;class ExponentialResidual : public ceres::SizedCostFunction<1, 2> {
public:ExponentialResidual(double x, double y): x_(x), y_(y) { }virtual bool Evaluate(const double* const* mc,double* residual,double** jacobians) const override{double tmp_y = exp(mc[0][0] * x_ + mc[0][1]);residual[0] = tmp_y - y_; // r = exp(mx+c) - y if(jacobians && jacobians[0]) {jacobians[0][0] = x_ * tmp_y; // dr / dmjacobians[0][1] = tmp_y; // dr / dc}return true;}private:const double x_, y_;
};int main(int argc, char** argv) {google::InitGoogleLogging(argv[0]);double mc[] = {0,0};double &m = mc[0];double &c = mc[1];Problem problem;for (int i = 0; i < kNumObservations; ++i) {problem.AddResidualBlock(new ExponentialResidual(data[2 * i], data[2 * i + 1]),new CauchyLoss(0.5), // 使用损失LossFunction,不再是nullptrmc);}Solver::Options options;options.linear_solver_type = ceres::DENSE_QR;options.minimizer_progress_to_stdout = true;Solver::Summary summary;Solve(options, &problem, &summary);std::cout << summary.BriefReport() << "\n";std::cout << "Initial m: " << 0.0 << " c: " << 0.0 << "\n";std::cout << "Final m: " << m << " c: " << c << "\n";return 0;
}
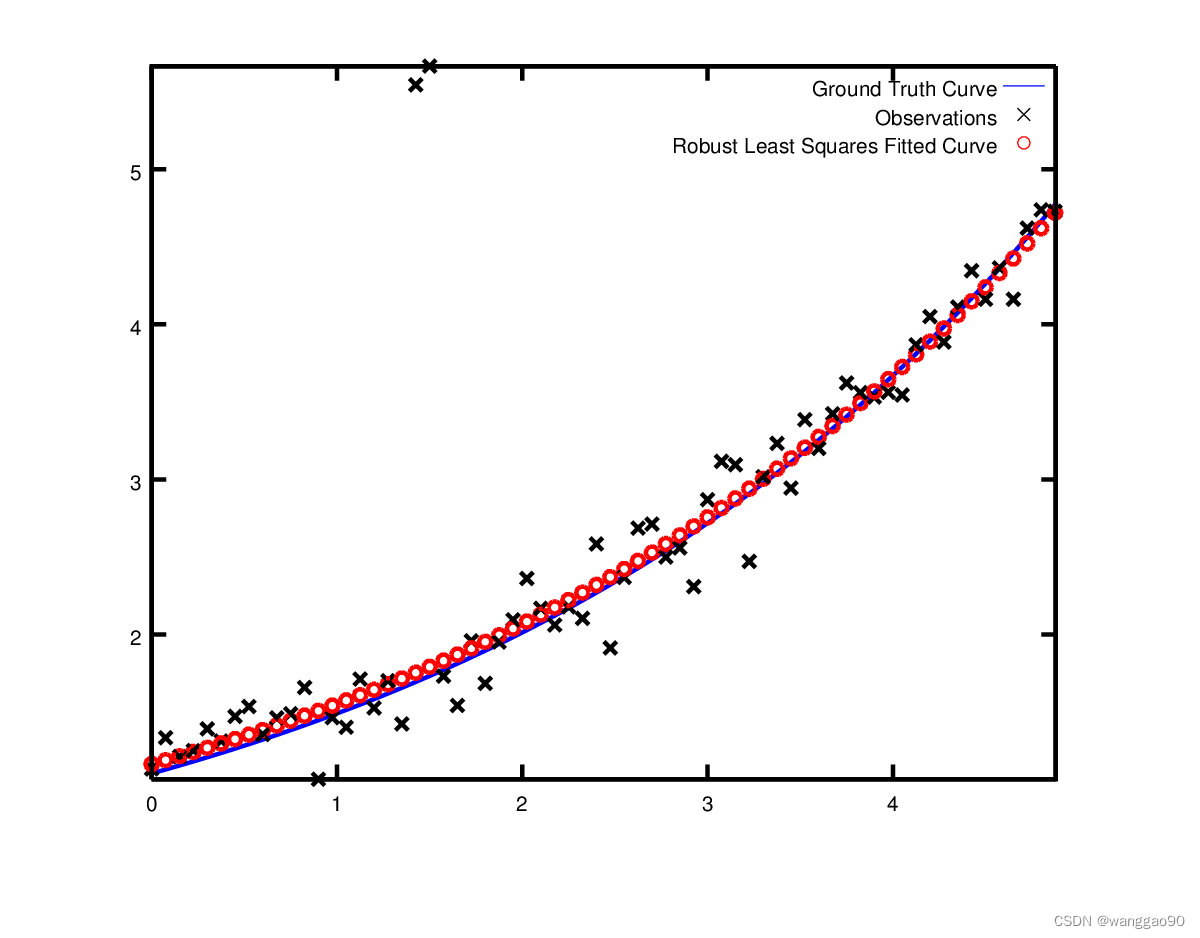
CauchyLoss 是Ceres Solver中的一个损失函数,参数0.5指定了损失函数的尺度。重新运行程序,得到的优化的结果相比不使用损失函数的结果更优。
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time0 1.815138e+01 0.00e+00 2.04e+01 0.00e+00 0.00e+00 1.00e+04 0 6.93e-04 1.14e-031 2.259471e+01 -4.44e+00 0.00e+00 5.48e-01 -7.74e-01 5.00e+03 1 7.61e-04 2.26e-032 2.258929e+01 -4.44e+00 0.00e+00 5.48e-01 -7.73e-01 1.25e+03 1 4.05e-04 2.74e-033 2.255683e+01 -4.41e+00 0.00e+00 5.48e-01 -7.68e-01 1.56e+02 1 4.51e-04 5.16e-034 2.225747e+01 -4.11e+00 0.00e+00 5.41e-01 -7.16e-01 9.77e+00 1 3.37e-04 5.58e-035 1.784270e+01 3.09e-01 8.54e+01 4.72e-01 5.44e-02 5.72e+00 1 8.33e-04 6.48e-036 7.557353e+00 1.03e+01 1.13e+02 1.06e-01 2.07e+00 1.72e+01 1 8.29e-04 7.38e-037 2.674796e+00 4.88e+00 7.69e+01 5.41e-02 1.78e+00 5.15e+01 1 8.22e-04 8.28e-038 1.946177e+00 7.29e-01 1.61e+01 5.00e-02 1.23e+00 1.54e+02 1 8.22e-04 9.17e-039 1.904587e+00 4.16e-02 2.20e+00 2.64e-02 1.11e+00 4.63e+02 1 8.23e-04 1.01e-0210 1.902929e+00 1.66e-03 2.28e-01 6.94e-03 1.12e+00 1.39e+03 1 8.93e-04 1.10e-0211 1.902884e+00 4.51e-05 1.49e-02 1.27e-03 1.14e+00 4.17e+03 1 9.34e-04 1.21e-02
Ceres Solver Report: Iterations: 12, Initial cost: 1.815138e+01, Final cost: 1.902884e+00, Termination: CONVERGENCE
Initial m: 0 c: 0
Final m: 0.287605 c: 0.151213
相关文章:
Ceres简介及示例(4)Curve Fitting(曲线拟合)
文章目录1、Curve Fitting1.1、残差定义1.2、 Problem问题构造1.3、完整代码1.4、运行结果2、Robust Curve Fitting1、Curve Fitting 到目前为止,我们看到的示例都是没有数据的简单优化问题。最小二乘和非线性最小二乘分析的原始目的是对数据进行曲线拟合。 以一个…...

音质最好的骨传导蓝牙耳机有哪些,推荐几款不错的骨传导耳机
骨传导耳机也称为“不入耳式”耳机,是一种通过颅骨、骨迷路、内耳淋巴液和听神经之间的信号传导,来达到听力保护目的的一种技术。由于它可以开放双耳,所以在跑步、骑行等运动时使用十分安全,可以避免外界的干扰。这种耳机在佩戴…...

计算机操作系统安全
操作系统安全是计算机系统安全的重要组成部分,目的是保护操作系统的机密性、完整性和可用性。在当前的网络环境下,操作系统面临着许多威胁,如病毒、木马、蠕虫、黑客攻击等等。为了保护操作系统的安全,需要采取各种措施来防范这些…...
超详细从入门到精通,pytest自动化测试框架实战教程-用例标记/执行(三)
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言 pytest可以通过标记…...

Java SE 基础(5) Java 环境的搭建
Java 虚拟机——JVM JVM (Java Virtual Machine ):Java虚拟机,简称JVM,是运行所有Java程序的假想计算机,是Java程序的运行环境,是Java 最具吸引力的特性之一。我们编写的Java代码,都…...

银行数字化转型导师坚鹏:银行对公客户数字化场景营销案例萃取
银行对公客户数字化场景营销案例萃取与行动落地课程背景: 很多银行存在以下问题:不清楚银行数字化营销与场景营销内涵?不知道如何开展对公客户数字化营销工作?不知道对公业务数字化场景营销成功案例? 学员收获&a…...

get和post的区别
1.用途上 get请求用来向服务器获取资源; post请求用来向服务器提交数据; 2.表单提交方式上 get请求直接将表单数据拼接到URL上,多个参数之间通过&符号连接; post请求将表单数据放到请求头或者请求体中; 3.传…...

Java调用Oracle存储过程
文章目录 Java调用Oracle存储过程Java调用Oracle存储过程 使用Java实现存储过程的步骤: 1、数据表、存储过程【已完成】 2、引入依赖包、数据源配置 3、Java实现【已完成】 – Oracle 创建数据表 CREATE TABLE STUDENT ( ID NUMBER (20) NOT NULL ENABLE PRIMARY KEY, NAME V…...

ubuntu如何设置qt环境变量
Qt 是一个1991年由Qt Company开发的跨平台C图形用户界面应用程序开发框架。它既可以开发GUI程序,也可用于开发非GUI程序,比如控制台工具和服务器。Qt是面向对象的框架,使用特殊的代码生成扩展(称为元对象编译器(Meta Object Compi…...

高管对谈|揭秘 NFT 技术背后的研发方法论
有人说,元宇宙是未来,NFT 则是通往这个可能的未来的数字通行证。 经过一度热炒之后,NFT 逐渐回归理性的「大浪淘沙」轨迹。NXTF_(廿四未来)正是一家将 NFT 向实体经济靠拢并与之结合的公司。 NXTF_利用区块链技术&am…...

是面试官放水,还是企业实在是缺人?这都没挂,字节原来这么容易进...
“字节是大企业,是不是很难进去啊?”“在字节做软件测试,能得到很好的发展吗?一进去就有9.5K,其实也没有想的那么难”直到现在,心情都还是无比激动! 本人211非科班,之前在字节和腾讯…...

JVM 本地方法栈
本地方法栈的作用 Java虚拟机栈于管理Java方法的调用,而本地方法栈用于管理本地方法的调用。本地方法栈,也是线程私有的。允许被实现成固定或者是可动态扩展的内存大小(在内存溢出方面和虚拟机栈相同) 如果线程请求分配的栈容量超…...

GPT-4老板:AI可能会杀死人类,已经出现我们无法解释的推理能力
来源: 量子位 微信号:QbitAI “AI确实可能杀死人类。” 这话并非危言耸听,而是OpenAI CEO奥特曼的最新观点。 而这番观点,是奥特曼在与MIT研究科学家Lex Fridman长达2小时的对话中透露。 不仅如此,奥特曼谈及了近期围绕ChatGPT…...

弹性盒布局
系列文章目录 前端系列文章——传送门 CSS系列文章——传送门 文章目录系列文章目录弹性盒模型(FlexibleBox 或 flexbox)什么是弹性盒?基本配置项给父元素添加给子元素添加弹性盒案例滚动条青蛙网页练习旧的弹性盒display:box 属性浏览器的兼…...
第13章_事务基础知识
第13章_事务基础知识 🏠个人主页:shark-Gao 🧑个人简介:大家好,我是shark-Gao,一个想要与大家共同进步的男人😉😉 🎉目前状况:23届毕业生,目前…...

LeetCode笔记:Biweekly Contest 101
LeetCode笔记:Biweekly Contest 101 1. 题目一 1. 解题思路2. 代码实现 2. 题目二 1. 解题思路2. 代码实现 3. 题目三 1. 解题思路2. 代码实现 4. 题目四 1. 解题思路2. 代码实现 比赛链接:https://leetcode.com/contest/biweekly-contest-101/ 1. 题…...

new和malloc两个函数详细实现与原理分析
1.申请的内存所在位置 new操作符从自由存储区(free store)上为对象动态分配内存空间,而malloc函数从堆上动态分配内存。自由存储区是C基于new操作符的一个抽象概念,凡是通过new操作符进行内存申请,该内存即为自由存储…...
[ROC-RK3568-PC] [Firefly-Android] 10min带你了解LCD的使用
🍇 博主主页: 【Systemcall小酒屋】🍇 博主追寻:热衷于用简单的案例讲述复杂的技术,“假传万卷书,真传一案例”,这是林群院士说过的一句话,另外“成就是最好的老师”,技术…...

【redis】redis分布式锁
目录一、为什么需要分布式锁二、分布式锁的实现方案三、redis分布式锁3.1 简单实现3.2 成熟的实现一、为什么需要分布式锁 1.在java单机服务中,jvm内部有一个全局的锁监视器,只有一个线程能获取到锁,可以实现线程之间的互斥 2.当有多个java服…...

UEditorPlus v3.0.0 接口请求头参数,插入换行优化,若干问题优化
UEditor是由百度开发的所见即所得的开源富文本编辑器,基于MIT开源协议,该富文本编辑器帮助不少网站开发者解决富文本编辑器的难点。 UEditorPlus 是有 ModStart 团队基于 UEditor 二次开发的富文本编辑器,主要做了样式的定制,更符…...

ChatGPT资源宝库:从提示工程到项目实践的完整指南
1. 项目概述:一份关于ChatGPT的“Awesome”清单意味着什么?如果你最近在GitHub上搜索过任何与ChatGPT、AI或提示工程相关的内容,那么你大概率见过一个以“awesome-”开头的仓库。而sindresorhus/awesome-chatgpt无疑是这个领域里最知名、最常…...

从零构建高性能技术博客:SSG选型、自动化部署与SEO优化实战
1. 项目概述:一个技术博客的诞生与演进“wangtunan/blog”,这看起来只是一个简单的GitHub仓库名,背后却是一个技术人持续输出、构建个人知识体系的完整实践。它不仅仅是一个存放Markdown文件的代码库,更是一个集成了现代前端技术栈…...

STM32CubeIDE实战指南:从代码编译到一键下载的完整流程解析
1. STM32CubeIDE开发环境概述 对于刚接触STM32开发的工程师来说,选择一款合适的集成开发环境(IDE)至关重要。STM32CubeIDE是ST官方推出的免费开发工具,它集成了代码编辑、编译、调试和下载功能于一体,特别适合新手快速上手。我在实际项目中使…...

Qdrant Python客户端全解析:从向量数据库连接到AI应用开发实战
1. 项目概述:从向量数据库到客户端,现代AI应用落地的关键拼图如果你最近在折腾大语言模型应用,或者想给自己的产品加上一个“智能大脑”,那你大概率已经听过“向量数据库”这个词了。简单来说,它就像一个专门为AI模型设…...

UEFITool深度解析:实战指南与高效使用技巧
UEFITool深度解析:实战指南与高效使用技巧 【免费下载链接】UEFITool UEFI firmware image viewer and editor 项目地址: https://gitcode.com/gh_mirrors/ue/UEFITool UEFITool是一款专为UEFI固件分析设计的开源工具,能够将复杂的二进制固件映像…...

AI量化交易实战:从机器学习模型到加密货币对冲基金系统构建
1. 项目概述:一个面向加密货币的AI对冲基金框架最近几年,AI在量化交易领域的应用已经从实验室走向了实战,尤其是在波动性极高的加密货币市场。如果你对量化交易和机器学习感兴趣,并且想找一个能直接上手、结构清晰的实战项目来学习…...

ARM Jazelle技术:硬件加速Java字节码执行详解
1. ARM Jazelle技术概述Jazelle技术是ARM架构中用于硬件加速Java字节码执行的关键扩展,最早出现在ARMv5TE架构中。这项技术通过在处理器内部集成Java字节码执行单元,实现了Java虚拟机(JVM)功能的硬件化。与传统的软件解释器相比,Jazelle能够将…...

可逆计算与量子电路合成:改进QM算法与全局优化
1. 可逆计算与量子电路合成基础在量子计算领域,可逆计算是一项关键技术,它不仅是实现低功耗设计的核心方法,更是量子电路合成的基础。传统计算机中的逻辑门大多是不可逆的,这意味着计算过程中会丢失信息并产生热量。而量子计算由于…...

基于强化学习的机器人抓取:从PPO/SAC算法到仿真部署全解析
1. 项目概述:一个基于强化学习的机器人抓取开源项目最近在机器人控制领域,强化学习(Reinforcement Learning, RL)的应用越来越火,尤其是在需要高精度、高适应性的任务上,比如机器人抓取。传统的抓取规划方法…...

基于BLE信号强度的寻物游戏:用CircuitPython实现无线接近探测
1. 项目概述:一个用蓝牙信号“捉迷藏”的硬件游戏几年前我第一次接触Adafruit的Circuit Playground系列开发板时,就被它那种“开箱即玩”的理念吸引了。它把LED、按钮、传感器都集成在一块板子上,让你不用焊接就能快速验证想法。后来出的Circ…...