【无人机设计与技术】四旋翼无人机,UAV仿真,轨迹跟踪PID控制
摘要
本文探讨了四旋翼无人机(UAV)在轨迹跟踪中的PID控制仿真方法。通过设计三轴方向的PID控制器,调节无人机的姿态与位置,使其能够准确跟踪预设轨迹。本文使用MATLAB/Simulink进行了建模与仿真,验证了PID控制算法在无人机轨迹跟踪中的有效性。实验结果表明,设计的控制器可以保证无人机在复杂轨迹下的平稳飞行,同时保持较好的跟踪精度。
理论
四旋翼无人机动力学模型
四旋翼无人机是一种由四个对称安装的旋翼产生推力的飞行器,其动力学模型较为复杂。无人机的运动包括六个自由度:三个平移自由度(x, y, z)和三个旋转自由度(俯仰角、滚转角、偏航角)。这些运动由旋翼的转速控制,通过调节每个旋翼的转速,可以控制无人机的姿态和位置。
四旋翼无人机的动力学方程可以通过牛顿-欧拉方程推导得到。姿态控制主要涉及旋转自由度的控制(俯仰、滚转、偏航),而位置控制则涉及平移自由度的控制(x, y, z)。
PID控制器
PID控制器是一种经典的反馈控制器,通过调节比例(P)、积分(I)和微分(D)三个参数来控制系统的输出。其核心思想是通过当前的误差信号来调节控制输出,从而使系统跟踪期望轨迹。在四旋翼无人机的控制中,PID控制器分别用于姿态和位置控制:
-
比例控制:与误差成正比的输出调节,加快系统响应速度。
-
积分控制:消除稳态误差。
-
微分控制:对误差的变化率进行响应,减少超调和震荡。
PID控制器通过调节这三个参数可以实现对无人机的平稳控制。
实验结果
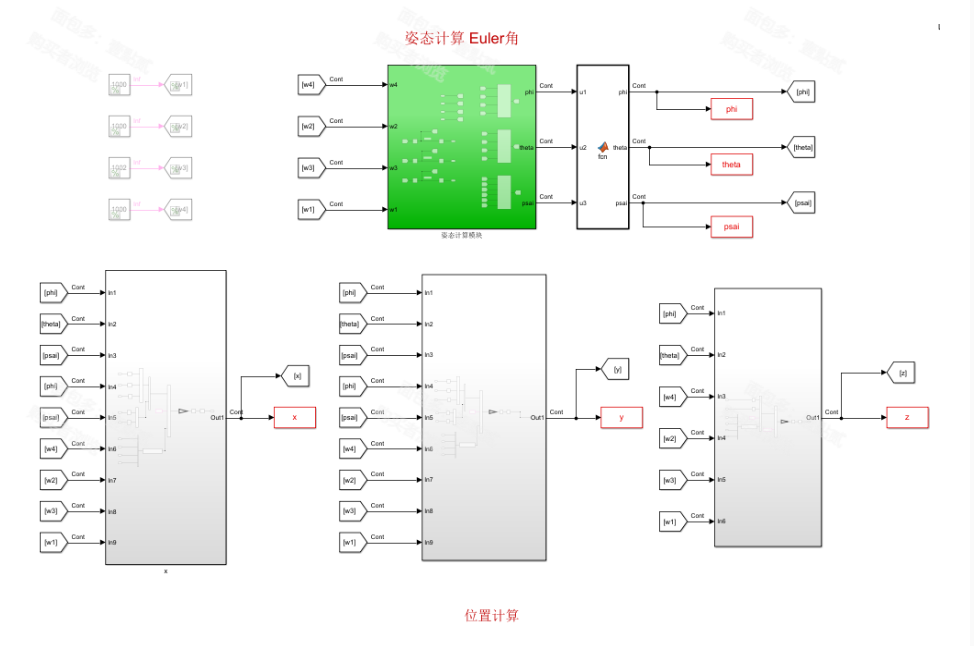
实验通过MATLAB/Simulink搭建了四旋翼无人机的动力学模型,并使用PID控制器进行轨迹跟踪仿真。实验结果展示了无人机在轨迹跟踪中的位置和姿态响应情况。以下是主要实验结果:
-
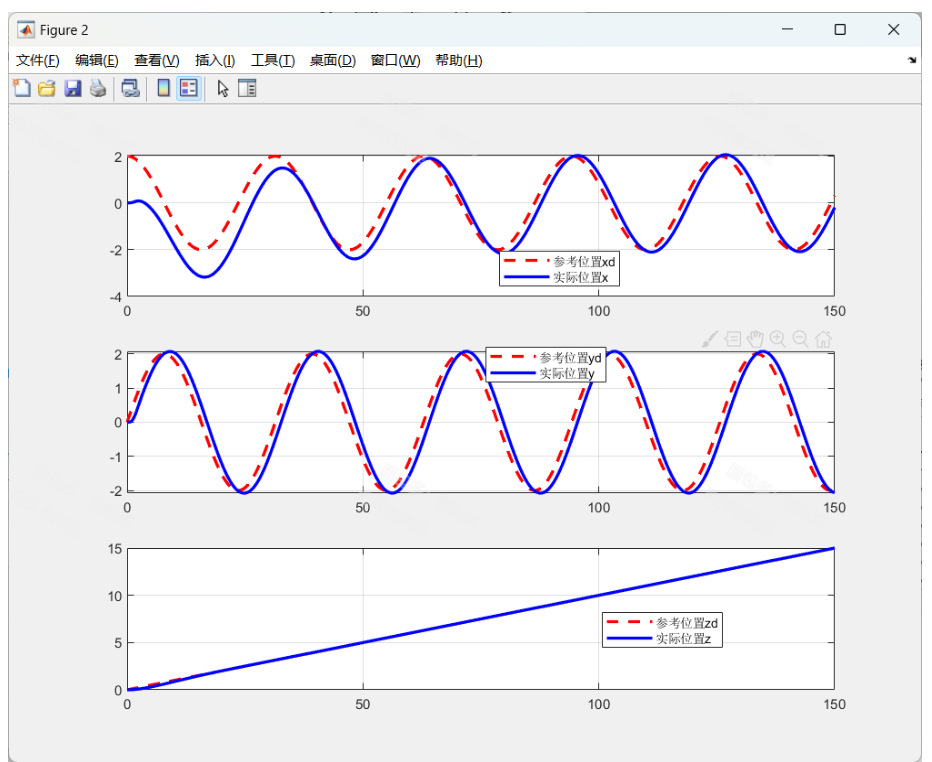
位置跟踪:如图所示,x、y、z三个方向的实际位置与预设轨迹进行了比较,红色虚线为期望轨迹,蓝色实线为无人机的实际轨迹。可以看出,PID控制器能够实现对期望轨迹的良好跟踪,误差较小。
-
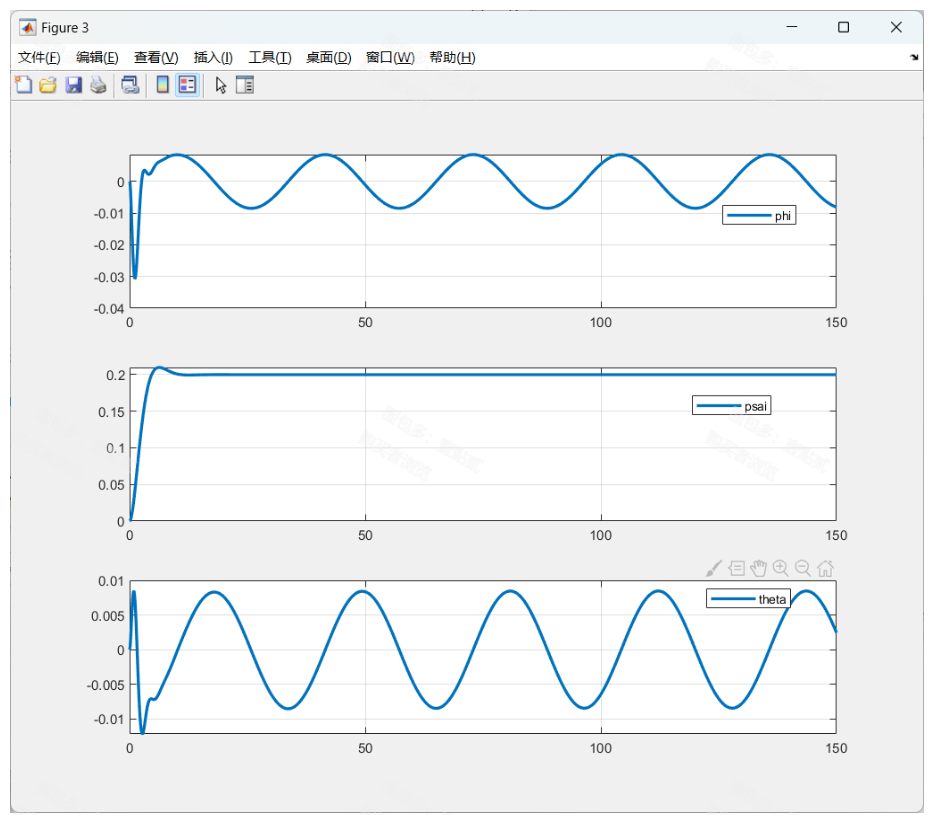
姿态响应:无人机的俯仰角(phi)、滚转角(theta)和偏航角(psi)的响应曲线显示,PID控制器能够快速稳定姿态,并且在有扰动的情况下能够迅速恢复到平衡状态。
-
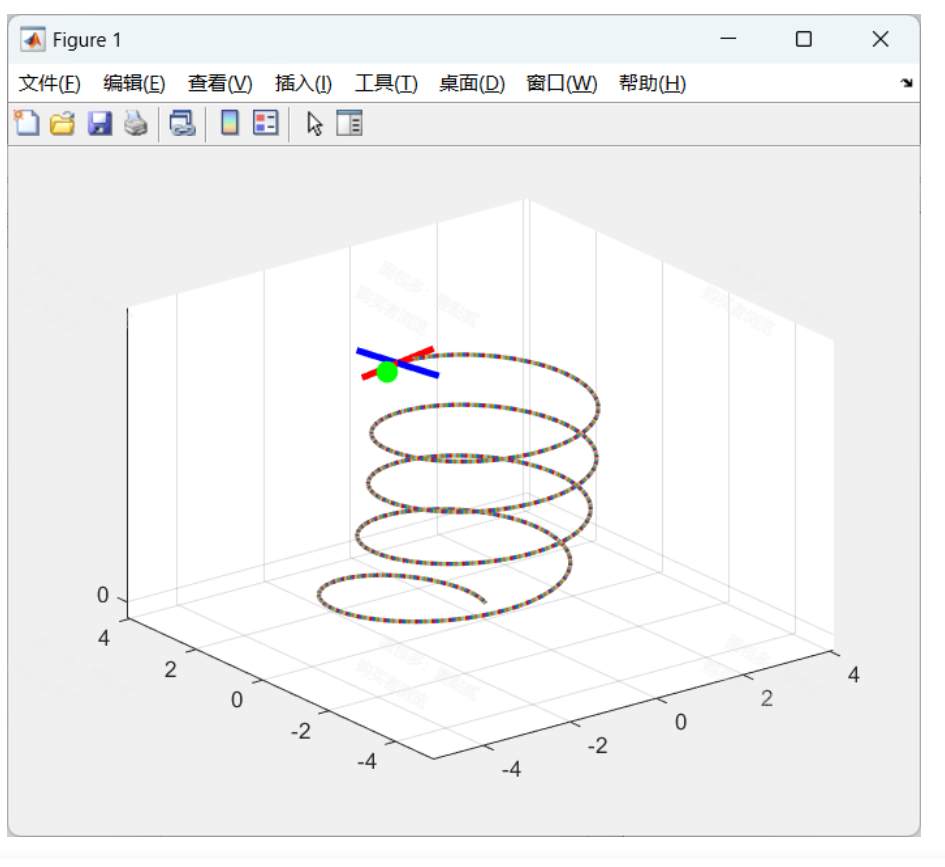
三维轨迹:如图1所示,无人机在三维空间中的螺旋轨迹表现出了平稳的控制效果,表明控制器在复杂轨迹跟踪中的表现良好。
部分代码
以下是基于MATLAB实现的四旋翼无人机轨迹跟踪的PID控制部分代码:
% 定义PID参数
Kp_x = 1.2; Ki_x = 0.1; Kd_x = 0.05;
Kp_y = 1.2; Ki_y = 0.1; Kd_y = 0.05;
Kp_z = 1.5; Ki_z = 0.1; Kd_z = 0.08;% 期望轨迹
t = 0:0.1:150;
x_d = sin(0.05*t);
y_d = cos(0.05*t);
z_d = 0.1 * t;% 初始化无人机位置和速度
x = 0; y = 0; z = 0;
vx = 0; vy = 0; vz = 0;% PID控制器实现
for k = 1:length(t)% 计算位置误差ex = x_d(k) - x;ey = y_d(k) - y;ez = z_d(k) - z;% PID控制输出ux = Kp_x * ex + Ki_x * sum(ex) + Kd_x * diff(ex);uy = Kp_y * ey + Ki_y * sum(ey) + Kd_y * diff(ey);uz = Kp_z * ez + Ki_z * sum(ez) + Kd_z * diff(ez);% 更新无人机状态vx = vx + ux * dt;vy = vy + uy * dt;vz = vz + uz * dt;x = x + vx * dt;y = y + vy * dt;z = z + vz * dt;% 存储数据x_data(k) = x;y_data(k) = y;z_data(k) = z;
end% 绘制轨迹图
figure;
plot3(x_data, y_data, z_data, 'b-', 'LineWidth', 2);
hold on;
plot3(x_d, y_d, z_d, 'r--', 'LineWidth', 1.5);
xlabel('X [m]'); ylabel('Y [m]'); zlabel('Z [m]');
title('3D Trajectory Tracking');
legend('Actual Path', 'Desired Path');
参考文献
❝
Bouabdallah, S., Murrieri, P., & Siegwart, R. (2004). Design and Control of an Indoor Micro Quadrotor. Proceedings of the 2004 IEEE International Conference on Robotics and Automation.
Hoffmann, G. M., Waslander, S. L., & Tomlin, C. J. (2008). Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment. AIAA Guidance, Navigation and Control Conference.
Mahony, R., Kumar, V., & Corke, P. (2012). Multirotor Aerial Vehicles: Modeling, Estimation, and Control of Quadrotor. IEEE Robotics & Automation Magazine*, 19(3), 20-32.
相关文章:
【无人机设计与技术】四旋翼无人机,UAV仿真,轨迹跟踪PID控制
摘要 本文探讨了四旋翼无人机(UAV)在轨迹跟踪中的PID控制仿真方法。通过设计三轴方向的PID控制器,调节无人机的姿态与位置,使其能够准确跟踪预设轨迹。本文使用MATLAB/Simulink进行了建模与仿真,验证了PID控制算法在无…...

回归预测|基于卷积神经网络-支持向量机的数据回归预测Matlab程序CNN-SVM 卷积提取特征与原始特征进行融合预测
回归预测|基于卷积神经网络-支持向量机的数据回归预测Matlab程序CNN-SVM 卷积提取特征与原始特征进行融合预测 文章目录 一、基本原理原理流程总结 二、实验结果三、核心代码四、代码获取五、总结 回归预测|基于卷积神经网络-支持向量机的数据回归预测Matlab程序CNN-SVM 卷积提…...

javaScript基础知识汇总
一、基础语法 1、区分大小写:无论是变量、函数名还是操作符,都区分大小写。 2、标识符:就是变量、函数、属性或函数参数的名称。标识符可以由一个或多个字符构成,但需要满足以下条件: 第一个字符必须是一个字母、下…...

《动手学深度学习》笔记2.2——神经网络从基础→进阶 (参数管理-每层的权重/偏置)
目录 0. 前言 正文:参数管理 1. 参数访问 1.1 [目标参数] 1.2 [一次性访问所有参数] 1.3 [从嵌套块收集参数] 2. 参数初始化 2.1 [内置初始化] 2.2 [自定义初始化] 2.3 [参数绑定-共享参数] 3. 小结(第2节) 4. 延后初始化 (原书第…...

双端之Nginx+Php结合PostgreSQL搭建Wordpress
第一台虚拟机:安装 Nginx 更新系统包列表: sudo apt update安装 Nginx及php扩展: sudo apt install nginx php-fpm php-pgsql php-mysqli -y启动 Nginx 服务: sudo systemctl start nginx检查 Nginx 是否正常运行: xdg-open http://localhost注意:终端命令打开网址 …...

Another redis desktop manager使用说明
Another redis desktop manager使用说明 概述界面介绍图示说明连接界面设置界面查看操作日志主界面信息进入redis-cli控制台更多 概述 Another Redis Desktop Manager是一个开源的跨平台 Redis 客户端,提供了简洁易用的图形用户界面(GUI)&am…...

【git】配置 Git 的换行符处理和安全性||安装 Ruby
配置 Git 的换行符处理和安全性: git config --global core.autocrlf input:这个设置确保在提交代码时,Git 会将 CRLF(Windows 的换行符)转换为 LF(Unix 的换行符),但在检出代码时不…...

VMware ESXi 8.0U3b macOS Unlocker OEM BIOS 2.7 Dell HPE 定制版 9 月更新发布
VMware ESXi 8.0U3b macOS Unlocker & OEM BIOS 2.7 Dell HPE 定制版 9 月更新发布 VMware ESXi 8.0U3b macOS Unlocker & OEM BIOS 2.7 标准版和厂商定制版 ESXi 8.0U3 标准版,Dell (戴尔)、HPE (慧与)、Lenovo (联想)、IEIT SYSTEMS (浪潮信息)、Cisco …...

Unity 代码裁剪(Strip Engine Code)
文章目录 0.IL2CPP 打包运行闪退问题1.什么是代码裁剪2.为什么要使用代码裁剪3.代码裁剪设置与级别4.强制保留代码4.1 使用[Preserve]标签4.2 使用Link.xml文件 5.Strip中遇到的问题及解决方法6.注意事项 0.IL2CPP 打包运行闪退问题 Google Play要求从2019年8月1日起apk必须支…...

单目3d重建DUSt3R 笔记
目录 DUSt3R 三维重建 报错RecursionError: maximum recursion depth exceeded in comparison 报错 numpy.core.multiarray failed to import 报错Numpy is not available 解决 升级版mast3r 速度变慢 修改了参数设置脚本: 测试效果 操作技巧 DUSt3R 三维重…...

AI驱动TDSQL-C Serverless 数据库技术实战营-与AI的碰撞
目录 一、简介 二、实验介绍 三、结果展示 四、实操指导 4.1 系统设计 4.2 环境搭建(手把手教程) 4.3 应用构建 4.4 效果展示 4.5 踩坑避雷总结 五、清理资源 5.1 删除TDSQL-C Serverless 5.2 删除 HAI 算力 六、实验总结归纳 一、简介 本…...

C++之String类(上)
片头 嗨!好久不见~ 今天我们来学习C的Sting类,不过,在学习它之前,我们先来对STL库有一个简单的了解。 STL(standard template library--标准模板库),是C标准库的重要组成部分,不仅是…...

kubernets基础-ingress详细介绍
文章目录 什么是IngressIngress详细说明Ingress示例 Ingress控制器Ingress控制器的工作原理Ingress控制器的特点常见的Ingress控制器 Ingress关联Ingress控制器一、Ingress资源对象二、Ingress控制器三、Ingress与Ingress控制器的关联方式四、注意事项 多实例部署一、Ingress多…...

jenkins部署Maven和NodeJS项目
在 Java 项目开发中,项目的编译、测试、打包等是比较繁琐的,属于重复劳动的工作,浪费人力和时间成本。以往开发项目时,程序员往往需要花较多的精力在引用 jar 包搭建项目环境上,跨部门甚至跨人员之间的项目结构都有可能…...

在unity资源中发现无效引用
本文主要解决在不打开unity的情况下搜索出无效引用的资源的方法 1. 概述 一般只要遍历一下目录里所有资源,判空一下就好了但有些情况下,不希望打开unity, 尤其希望是在资源整合时,想更快验证资源的合法性, 这对合并提交及出包验证时,都要较大的需求 2. 简单的验证方法 简单来…...

C#知识|基于反射和接口实现抽象工厂设计模式
哈喽,你好啊,我是雷工! 01 应用场景 在项目的多数据库支持上、业务的多算法封装、以及各种变化的业务中; 02 抽象工厂组成 抽象工厂包括抽象产品(即业务接口,可以通过抽象类或抽象接口设计)…...

【分布式微服务云原生】gRPC vs RPC:深入探索远程过程调用的现代与经典
摘要 在分布式系统的世界里,gRPC和RPC是两个耳熟能详的术语,但它们之间有何区别和联系?本文将深入探讨gRPC和RPC的概念、关键特性、以及它们在现代软件开发中的应用。你将了解到gRPC如何作为RPC的一种实现,提供高性能的跨语言远程…...

听说这是MATLAB基础?
MATLAB(矩阵实验室)是一个强大的高性能计算环境和编程语言,广泛应用于数学计算、算法开发、数据分析、可视化以及模拟等多个领域。以下是MATLAB的一些基础知识,涵盖其功能、语法、基本操作等方面。 1. MATLAB环境 工作区…...

【CSS/HTML】圣杯布局和双飞翼布局实现两侧宽度固定,中间宽度自适应及其他扩展实现
前沿简介 圣杯布局和双飞翼布局是前端重要的布局方式。两者的功能相同,都是为了实现一个两侧宽度固定,中间宽度自适应的三栏布局。 圣杯布局来源于文章In Search of the Holy Grail,双飞翼布局来源于淘宝UED。 两者的实现方式有差异,但是都…...

数据流和数据流处理技术
一数据流 首先明确数据流概念:数据流是连续不断生成的、快速变化的无界数据序列 数据流类型: 数据流大致可以分为四种类型 1.连续型数据流:不断地产生数据,数据稳定速度输入系统。 2.突发型数据流:在某特定时间或…...

AI如何重塑科学创新:从构思成本坍塌到知识组合爆炸
1. 科学创新的范式转移:从“不确定性”到“风险”在过去的科研实践中,我们常常面临一个根本性的困境:不确定性。这并非指我们不知道某个实验的结果,而是指我们连可能的结果是什么、其发生的概率有多大,都无从知晓。这就…...
)
从Anaconda虚拟环境到Docker镜像:一份给数据科学家的迁移指南(避坑Dockerfile编写)
从Anaconda到Docker:数据科学家的环境迁移实战手册 当你的机器学习模型在本地运行良好,却在同事的电脑上频频报错时;当论文评审要求提供可复现的实验环境时;当需要将训练好的模型部署到云服务器时——conda虚拟环境的局限性便开始…...

从平面到立体:ImageToSTL如何让任何图片在3分钟内变成立体可打印模型
从平面到立体:ImageToSTL如何让任何图片在3分钟内变成立体可打印模型 【免费下载链接】ImageToSTL This tool allows you to easily convert any image into a 3D print-ready STL model. The surface of the model will display the image when illuminated from t…...

AI信息摘要系统:从RSS抓取到LLM摘要的自动化实现
1. 项目概述:AI驱动的每日信息摘要最近在GitHub上看到一个挺有意思的项目,叫“ai-daily-digest”。光看名字,你大概能猜到它想做什么:用人工智能来帮你整理每日信息。但具体怎么实现,能解决什么问题,背后又…...

实测:2026 年国内直连 AI 一站式平台,聊天 / 绘画 / 论文 / 视频全搞定,不用翻墙不花冤枉钱
最近 AI 圈真的太卷了。ChatGPT 5.4、Gemini 3.1、Claude Code 轮番上新,多模态、长文本、代码 Auto Mode 一个比一个强。但普通用户想用明白,真的太折腾。先说说我踩过的三大坑,句句大实话网络糟心到崩溃官网打不开、地区不可用、加载转圈、…...

多渠道订单数据处理自动化,落地步骤与ERP打通方案 | 2026企业级智能体实战手册
在2026年的数字化转型深水区,企业面临的不再是“是否要自动化”的问题, 而是如何在高并发、多维度的全渠道业务压力下, 实现订单流、资金流与信息流的绝对同步。 传统的OMS(订单管理系统)与ERP(企业资源计划…...

5分钟搞定Mac Boot Camp驱动:告别繁琐手动安装的智能工具
5分钟搞定Mac Boot Camp驱动:告别繁琐手动安装的智能工具 【免费下载链接】brigadier Fetch and install Boot Camp ESDs with ease. 项目地址: https://gitcode.com/gh_mirrors/bri/brigadier 还在为Mac电脑安装Windows驱动而头疼吗?Brigadier是…...

CANdela Studio配置避坑指南:从10服务到Data Type,这些细节别踩雷
CANdela Studio配置避坑指南:从10服务到Data Type,这些细节别踩雷 在汽车电子诊断功能开发中,CANdela Studio作为诊断数据库(CDD)的核心编辑工具,其配置精度直接影响着诊断协议栈的生成质量。许多工程师能够完成基础配置ÿ…...

PCB高级工艺如何降本:盲孔、微孔与HDI设计的成本优化实战
1. 项目概述:当高级PCB技术成为降本利器在硬件研发圈子里待久了,总有一个根深蒂固的印象:但凡沾上“高级”、“高密度”这些词的技术,比如盲孔、埋孔和微孔,那成本肯定是蹭蹭往上涨。我刚开始接触HDI板设计时也是这么想…...

ML:SARSA 的基本原理与实现
在强化学习中,智能体(Agent)并不是一次性从已有标签中学习答案,而是在环境(Environment)中不断尝试动作、观察结果、获得奖励,并根据经验逐步调整行为策略。在 Q 学习中,智能体可以通…...