Linux_kernel字符设备驱动12
一、字符设备的编程框架
在Linux_kernel驱动开发11中,我们介绍的系统调用。只是为了做一个实验,在真正开发时,我们并不会直接在内核中添加一个新的系统调用,这样做会导致内核体积变大。
1、字符设备结构体
我们实现一个硬件字符设备的驱动程序,实际上是实例化一个struct cdev类型的对象。
【1】struct cdev; // 存储字符设备的相关信息
注意:
在该结构体中,我们只需关注这两个成员,其他的成员由内核自己维护
【2】dev_t dev; // 指示当前的设备号
【3】const struct file_operations *ops; // 操作函数的集合




1)设备号
【1】区分主次设备号
设备号(32bit) = 主设备号(12bit [msb])+ 次设备号(20bit [lsb])
1】示例
ls -l /dev/tty0
主次设备号的范围理论上都是[0, 255]
主设备号:区分不同类型的设备
次设备号:区分同一类型设备的不同个体
MINORBITS:次设备号的位数
MINORMASK:次设备号掩码
MAJOR(dev):得到主设备号
MINOR(dev):得到次设备号
MKDEV(ma,mi):将主设备号与次设备号合为一个32bit整型数(dev_t)
【2】静态注册设备号
就是自己先挑一个没有被内核占用的设备号去注册
0】查看被内核占用的设备号
cat /proc/devices
1】register_chrdev_region(注册设备号)
注释:
from:要注册的起始设备号
count:要连续注册的设备号个数
name:给设备起的名称
2】unregister_chrdev_region(注销设备号)
注释:
from:要注销的起始设备号
count:要连续注销的设备号个数
【3】静态注册实验
1】进入工程目录
cd /home/zjd/s5p6818/KERNEL/drivers
2】创建新的工程
mkdir chrdev
3】编写程序
vim chrdev.c
#include <linux/init.h> #include <linux/module.h> #include <linux/fs.h>#define CHRDEV_MAGOR 200 #define CHRDEV_MINOR 10 #define CHRDEV_NUM 1 #define CHRDEV_NAME "leds"MODULE_LICENSE("GPL"); MODULE_AUTHOR("Zjd");int dev = 0; // store the major dev number and the minor dev numberint __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// dev = major << 20 | minor;// there is a define func to do this taskdev = MKDEV(major, minor);register_chrdev_region(dev, CHRDEV_NUM, CHRDEV_NAME); //register the number of devicereturn 0; }void __exit chrdev_exit(void) {unregister_chrdev_region(dev, CHRDEV_NUM);return ; }module_init(chrdev_init); module_exit(chrdev_exit);4】编写Makefile
vim Makefile
obj-m += chrdev.o KERNEL_PATH=/home/zjd/s5p6818/KERNEL/kernel ROOTFS_PATH=/nfs_share/_installall:make -C $(KERNEL_PATH) M=$(PWD) modulescp *.ko $(ROOTFS_PATH)clean:make -C $(KERNEL_PATH) M=$(PWD) clean5】编译工程
make
6】下位机验证
注意:我们现在只有设备号,而没有设备文件
【4】动态注册设备号
内核自己找一个没有注册的设备号,注册完归程序员使用
1】alloc_chrdev_region(注册设备号)
注释:
dev:回填设备号
baseminor:次设备号的基值(起始值)
count:要连续注册的设备号个数
name:给设备起的名称
2】unregister_chrdev_region(注销设备号)
注释:
from:要注销的起始设备号
count:要连续注销的设备号个数
【5】动态注册实验
1】编写程序
vim chrdev.c
#include <linux/init.h> #include <linux/module.h> #include <linux/fs.h>#define CHRDEV_MAGOR 200 #define CHRDEV_MINOR 10 #define CHRDEV_NUM 1 #define CHRDEV_NAME "leds"MODULE_LICENSE("GPL"); MODULE_AUTHOR("Zjd");int dev = 0; // store the major dev number and the minor dev number #if 0 // fixed register int __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// dev = major << 20 | minor;// there is a define func to do this taskdev = MKDEV(major, minor);register_chrdev_region(dev, CHRDEV_NUM, CHRDEV_NAME); //register the number of devicereturn 0; } #else // variable register int __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// there is a define func to register the number of devices automaticallyalloc_chrdev_region(&dev, CHRDEV_MINOR, CHRDEV_NUM, CHRDEV_NAME);major = MAJOR(dev); // gain the major dev numberminor = MINOR(dev); // gain the minor dev numberprintk(KERN_EMERG "dev number is :%d\n major number is :%d\n minor number is :%d\n", dev, major, minor);return 0; } #endifvoid __exit chrdev_exit(void) {unregister_chrdev_region(dev, CHRDEV_NUM);return ; }module_init(chrdev_init); module_exit(chrdev_exit);2】编写Makefile
vim Makefile
obj-m += chrdev.o KERNEL_PATH=/home/zjd/s5p6818/KERNEL/kernel ROOTFS_PATH=/nfs_share/_installall:make -C $(KERNEL_PATH) M=$(PWD) modulescp *.ko $(ROOTFS_PATH)clean:make -C $(KERNEL_PATH) M=$(PWD) clean3】编译工程
make
4】下位机验证
注意:我们现在只有设备号,而没有设备文件












2)操作函数的集合
【1】操作函数集合
const struct file_operations *ops; // 操作函数的集合
实现一个字符设备驱动程序的主要编程工作都集中在操作函数集合,我们将来具体到某一个字符设备驱动程序的时候,只需要实现下列函数集合的子集就可以了。
【2】内核中提供的操作cdev的API
1】cdev_init(初始化cdev结构体)
2】cdev_add(将cdev注册到内核)
注释:
p:要注册的cdev地址
dev:要注册的设备号
count:要连续注册的cdev个数
3】cdev_del(从内核中注销cdev)
注释:
p:要注销的cdev地址
【3】实验
1】进入工程目录
cd /home/zjd/s5p6818/KERNEL/drivers
2】创建新的工程
mkdir chrdev_func
3】编写程序
vim chrdev_func.c
#include <linux/init.h> #include <linux/module.h> #include <linux/fs.h> #include <linux/cdev.h>#define CHRDEV_MAGOR 200 #define CHRDEV_MINOR 10 #define CHRDEV_NUM 1 #define CHRDEV_NAME "myleds"MODULE_LICENSE("GPL"); MODULE_AUTHOR("Zjd");int dev = 0; // store the major dev number and the minor dev number// 1_step :define a struct cdev be named led_cdev struct cdev led_cdev;// 3_step :implement the function of led_fops int led_open(struct inode *inode, struct file *fp) {printk(KERN_EMERG "enter:%s\n", __FUNCTION__);return 0; }int led_close(struct inode *inode, struct file *fp) {printk(KERN_EMERG "enter:%s\n", __FUNCTION__);return 0; }// 2_step :define a struct file_operation be named led_fops // what functions shall we to implement ? // there is turn_on and turn_off of the leds // So, we should to implement the function of open() and release(), eithor or we should keep up the same type as the definations of the struct file_operations struct file_operations led_fops = {.owner = THIS_MODULE,// int (*open) (struct inode *, struct file *);.open = led_open,// int (*release) (struct inode *, struct file *);.release = led_close };#if 0 // fixed register int __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// dev = major << 20 | minor;// there is a define func to do this taskdev = MKDEV(major, minor);register_chrdev_region(dev, CHRDEV_NUM, CHRDEV_NAME); //register the number of devicereturn 0; } #else // variable register int __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// there is a define func to register the number of devices automaticallyalloc_chrdev_region(&dev, CHRDEV_MINOR, CHRDEV_NUM, CHRDEV_NAME);major = MAJOR(dev); // gain the major dev numberminor = MINOR(dev); // gain the minor dev numberprintk(KERN_EMERG "dev number is :%d\n major number is :%d\n minor number is :%d\n", dev, major, minor);// 4_step :initalize the struct cdev object led_cdevcdev_init(&led_cdev, &led_fops);// 5_step :register led_cdev into Kernelcdev_add(&led_cdev, dev, CHRDEV_NUM);return 0; } #endifvoid __exit chrdev_exit(void) {// 6_step :destory cdevcdev_del(&led_cdev);unregister_chrdev_region(dev, CHRDEV_NUM);return ; }module_init(chrdev_init); module_exit(chrdev_exit);4】编写Makefile
vim Makefile
obj-m += chrdev_func.o KERNEL_PATH=/home/zjd/s5p6818/KERNEL/kernel ROOTFS_PATH=/nfs_share/_installall:make -C $(KERNEL_PATH) M=$(PWD) modulescp *.ko $(ROOTFS_PATH)clean:make -C $(KERNEL_PATH) M=$(PWD) clean5】编译工程
make
6】下位机安装模块
7】写一个应用层程序测试
mkdir test
cd test
vim led_test.c
#include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h>#define CDEV_PATH "/dev/myleds"int main(void) {int fd = 0;if((fd = open(CDEV_PATH, O_RDWR)) < 0) {perror("open()");return -1;}printf("open success!\n");sleep(5);printf("closing...\n");close(fd);return 0; }arm-cortex_a9-linux-gnueabi-gcc led_test.c -o led_test
cp led_test /nfs_share/_install/
8】下位机测试
手动创建设备文件
mknod /dev/myleds c 244 10
./led_test
9】疑惑
内核中的打印函数与应用程序中的打印函数,执行顺序孰先孰后?
不确定:内核打印输出的是自己维护的缓冲区,应用程序打印输出的是标准输出缓冲区









二、GPIO库
1、读懂开发板原理图
LED0 GPIOB26
LED1 GPIOC11
LED2 GPIOC7
LED3 GPIOC12
输出低电平,灯亮
输出高电平,灯灭
2、CPU Data Sheet
#define GPIOBOUT *(volatile unsigned int *)0xC001B000
#define GPIOBOUT *(volatile unsigned int *)0xC001B000
#define GPIOBOUT *(volatile unsigned int *)0xC001B000
#define GPIOBOUT *(volatile unsigned int *)0xC001B000
#define GPIOBOUT *(volatile unsigned int *)0xC001B000
#define GPIOBOUT *(volatile unsigned int *)0xC001B000
3、内核中提供的操作GPIO的API
【0】gpio宏定义
【1】gpio_request(申请GPIO管脚)
int gpio_request(unsigned gpio, const char *label)
【2】使用GPI管脚
1】gpio_direction_input(设置输入)
2】gpio_direction_output(设置输出)
3】gpio_set_value(设置value)
4】gpio_get_value(获取value)
【3】gpio_free(释放GPIO管脚)
void gpio_free(unsigned gpio)







4、实验
【1】进入工程目录
cd /home/zjd/s5p6818/KERNEL/drivers
【2】创建新的工程
mkdir led_drv
【3】编写程序
vim led_drv.c
#include <linux/init.h> #include <linux/module.h> #include <linux/fs.h> #include <linux/cdev.h> #include <linux/gpio.h> #include <mach/platform.h>#define CHRDEV_MAGOR 200 #define CHRDEV_MINOR 26 #define CHRDEV_NUM 1 #define CHRDEV_NAME "myleds" #define HIGH 1 #define LOW 0MODULE_LICENSE("GPL"); MODULE_AUTHOR("Zjd");int dev = 0; // store the major dev number and the minor dev number// 1_step :define a struct cdev be named led_cdev struct cdev led_cdev;// 3_step :implement the function of led_fops int led_open(struct inode *inode, struct file *fp) {printk(KERN_EMERG "enter:%s\n", __FUNCTION__);// c_step :set the value=0(turn on) of the gpiogpio_set_value(PAD_GPIOB26, LOW);return 0; }int led_close(struct inode *inode, struct file *fp) {printk(KERN_EMERG "enter:%s\n", __FUNCTION__);// c_step :set the value=1(turn off) of the gpiogpio_set_value(PAD_GPIOB26, HIGH);return 0; }// 2_step :define a struct file_operation be named led_fops // what functions shall we to implement ? // there is turn_on and turn_off of the leds // So, we should to implement the function of open() and release(), eithor or we should keep up the same type as the definations of the struct file_operations struct file_operations led_fops = {.owner = THIS_MODULE,// int (*open) (struct inode *, struct file *);.open = led_open,// int (*release) (struct inode *, struct file *);.release = led_close };#if 0 // fixed register int __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// dev = major << 20 | minor;// there is a define func to do this taskdev = MKDEV(major, minor);register_chrdev_region(dev, CHRDEV_NUM, CHRDEV_NAME); //register the number of devicereturn 0; } #else // variable register int __init chrdev_init(void) {int major = CHRDEV_MAGOR; // major dev numberint minor = CHRDEV_MINOR; // minor dev number// there is a define func to register the number of devices automaticallyalloc_chrdev_region(&dev, CHRDEV_MINOR, CHRDEV_NUM, CHRDEV_NAME);major = MAJOR(dev); // gain the major dev numberminor = MINOR(dev); // gain the minor dev numberprintk(KERN_EMERG "dev number is :%d\n major number is :%d\n minor number is :%d\n", dev, major, minor);// 4_step :initalize the struct cdev object led_cdevcdev_init(&led_cdev, &led_fops);// 5_step :register led_cdev into Kernelcdev_add(&led_cdev, dev, CHRDEV_NUM);// a_step :apply gpiogpio_request(PAD_GPIOB26, "LED0");// b_step :set the default value=1(turn_off) of GPIOB26gpio_direction_output(PAD_GPIOB26, HIGH);return 0; } #endifvoid __exit chrdev_exit(void) {// e_step :release gpiogpio_free(PAD_GPIOB26);// 6_step :destory cdevcdev_del(&led_cdev);unregister_chrdev_region(dev, CHRDEV_NUM); // unregister the number of devreturn ; }module_init(chrdev_init); module_exit(chrdev_exit);【4】编写Makefile
vim Makefile
obj-m += led_drv.o KERNEL_PATH=/home/zjd/s5p6818/KERNEL/kernel ROOTFS_PATH=/nfs_share/_installall:make -C $(KERNEL_PATH) M=$(PWD) modulescp *.ko $(ROOTFS_PATH)clean:make -C $(KERNEL_PATH) M=$(PWD) clean【5】编译工程
make
【6】下位机安装模块
【7】编写应用层程序
mkdir test
cd test
vim led_test.c
#include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h>#define CDEV_PATH "/dev/myleds"int main(void) {int fd = 0;if((fd = open(CDEV_PATH, ORDWR)) < 0) {perror("open()");return -1;}printf("open success!\n");sleep(5);printf("closing...\n");close(fd);return 0; }arm-cortex_a9-linux-gnueabi-gcc led_test.c -o led_test
cp led_test /nfs_share/_install/
【8】下位机测试
手动创建设备文件
mknod /dev/myleds c 244 26
./led_test





三、用户态与内核态的数据交互
用户空间不能直接访问内核空间
内核空间不能直接访问用户空间
1)内核中提供的数据交互的API
【1】传递多数据
1】copy_to_user(内核到用户)
int copy_to_user(void __user *to, const void *from, int n)
注释:
to:内核空间缓冲区地址,
from:用户空间地址
n:数据字节数
retval:不能被复制的字节数,返回0表示全部复制成功。
2】copy_from_user(用户到内核)
int copy_from_user(void *to, const void __user *from, int n)
注释:
to:内核空间缓冲区地址,
from:用户空间地址
n:数据字节数
retval:不能被复制的字节数,返回0表示全部复制成功。
【2】传递单数据
可以从指定空间获取单个数据,单个数据并不是指一个字节数据,对ARM而言,一次性可获取一个char、short或者 int型的数据,即1、2或者4字节。
1】put_user(x, ptr)(内核到用户)
注释:
x :内核空间的数据,
p :用户空间的指针。
传递成功,返回 0,否则返回-EFAULT。
2】get_user(x, ptr)(用户到内核)
注释:
x :内核空间的数据,
p :用户空间的指针。
传递成功,返回 0,否则返回-EFAULT。
注意:
以上API与C标准库中memcpy(3)相似,但多了一个对访问的空间的权限检查




2、实验
【1】进入工程目录
cd /home/zjd/s5p6818/KERNEL/drivers
【2】创建新的工程
mkdir param_drv
【3】编写程序
vim param_drv.c
#include <linux/init.h> #include <linux/module.h> #include <linux/fs.h> #include <linux/cdev.h> #include <linux/gpio.h> #include <mach/platform.h> #include <linux/uaccess.h>#define CHRDEV_MAGOR 200 #define CHRDEV_MINOR 26 #define CHRDEV_NUM 1 #define CHRDEV_NAME "myleds" #define HIGH 1 #define LOW 0 #define LED0 (PAD_GPIO_B + 26) #define LED1 (PAD_GPIO_C + 12) #define LED2 (PAD_GPIO_C + 7) #define LED3 (PAD_GPIO_C + 11)unsigned int leds[] = {LED0, LED1, LED2, LED3}; const char *leds_label[] = {"LED0", "LED1", "LED2", "LED3"};MODULE_LICENSE("GPL"); MODULE_AUTHOR("Zjd");int dev = 0;struct cdev led_cdev;int k_cmd = 0; //kernel's buffer int k_status = 0; //the state of LEDsint led_open(struct inode *inode, struct file *fp) {return 0; }int led_close(struct inode *indoe, struct file *fp) {return 0; }ssize_t led_read(struct file *fp, char __user *buf, size_t len, loff_t *offset) {int ret = 0;ret = copy_to_user(buf, &k_status, len);return len; }ssize_t led_write(struct file *fp, const char __user *buf, size_t len, loff_t *offset) {int ret = 0;int i = 0;ret = copy_from_user(&k_cmd, buf, len);for (i = 0; i < sizeof(leds) / sizeof(leds[0]); i++) {gpio_set_value(leds[i], k_cmd);}k_status = k_cmd;return len; }struct file_operations led_fops = {.owner = THIS_MODULE,.open = led_open,.release = led_close,.read = led_read,.write = led_write };int __init chrdev_init(void) {int major = CHRDEV_MAGOR;int minor = CHRDEV_MINOR;int i = 0;alloc_chrdev_region(&dev, CHRDEV_MINOR, CHRDEV_NUM, CHRDEV_NAME);major = MAJOR(dev);minor = MINOR(dev);printk(KERN_EMERG "major = %d\nminor = %d\n", major, minor);cdev_init(&led_cdev, &led_fops);cdev_add(&led_cdev, dev, CHRDEV_NUM);for (i = 0; i < sizeof(leds) / sizeof(leds[0]); i++) {gpio_request(leds[i], leds_label[i]);gpio_direction_output(leds[i], HIGH);}return 0; }void __exit chrdev_exit(void) {int i = 0;for (i = 0; i < sizeof(leds) / sizeof(leds[0]); i++) {gpio_free(LED1);}cdev_del(&led_cdev);unregister_chrdev_region(dev, CHRDEV_NUM);return ; }module_init(chrdev_init); module_exit(chrdev_exit);【4】编写Makefile
vim Makefile
obj-m += param_drv.o KERNEL_PATH=/home/zjd/s5p6818/KERNEL/kernel ROOTFS_PATH=/nfs_share/_installall:make -C $(KERNEL_PATH) M=$(PWD) modulescp *.ko $(ROOTFS_PATH)clean:make -C $(KERNEL_PATH) M=$(PWD) clean【5】编译工程
make
【6】下位机安装模块
【7】编写应用层程序
mkdir test
cd test
vim led_test.c
#include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> #include <string.h>#define ON 0 #define OFF 1 #define CDEV_PATH "/dev/myleds"int main(int argc, char *argv[]) {int fd = 0;int cmd = 0;int status = 0;if (argc < 2) {printf("Usage : %s <on/off>\n", argv[0]);return -1;}if (!strcmp(argv[1], "on")) {cmd = ON;} else if (!strcmp(argv[1], "off")){cmd = OFF;} else {printf("illegal param\n");return -2;}if((fd = open(CDEV_PATH, O_RDWR)) < 0) {perror("open()");return -3;}printf("open success!\n");write(fd, &cmd, sizeof(cmd));read(fd, &status, sizeof(status));if (status == ON) {printf("Led is On!\n");} else {printf("Led is Off!\n");}printf("closing...\n");close(fd);return 0; }vim Makefile
SRC=led_test.c OBJ=led_testARM_COMPILE=arm-cortex_a9-linux-gnueabi- GCC=gccROOTFS_PATH=/nfs_share/_installall:$(ARM_COMPILE)$(GCC) $(SRC) -o $(OBJ)cp $(OBJ) $(ROOTFS_PATH)clean:rm -rf $(OBJ)【8】编译工程
make
【9】下位机测试
手动创建设备文件
mknod /dev/myleds c 244 26
./led_test






四、ioctl
1)介绍


2)实操
【1】进入工程目录
cd /home/zjd/s5p6818/KERNEL/drivers
【2】创建新的工程
mkdir ioctl
【3】编写程序
vim ioctl.c
#include <linux/init.h> #include <linux/module.h> #include <linux/fs.h> #include <linux/cdev.h> #include <linux/gpio.h> #include <mach/platform.h> #include <linux/uaccess.h>MODULE_LICENSE("GPL"); MODULE_AUTHOR("Zjd");#define CHRDEV_MAGOR 200 #define CHRDEV_MINOR 26 #define CHRDEV_NUM 1 #define CHRDEV_NAME "myleds" #define HIGH 1 #define LOW 0 #define LED0 (PAD_GPIO_B + 26) #define LED1 (PAD_GPIO_C + 12) #define LED2 (PAD_GPIO_C + 7) #define LED3 (PAD_GPIO_C + 11) #define TURN_ON LOW #define TURN_OFF HIGHdev_t dev = 0;struct cdev led_cdev;typedef struct led_desc{unsigned int gpio;char *name; }led_desc_t;led_desc_t leds[] = {{LED0, "LED0"},{LED1, "LED1"},{LED2, "LED2"},{LED3, "LED3"} };long led_ioctl(struct file *fp, unsigned int cmd, unsigned long arg) {int k_index = 0;int ret = 0;ret = copy_from_user(&k_index, (const void *)arg, sizeof(int));if (k_index > 4 || k_index < 1)return -EINVAL;switch (cmd) {case TURN_ON:gpio_set_value(leds[k_index - 1].gpio, LOW);break;case TURN_OFF:gpio_set_value(leds[k_index - 1].gpio, HIGH);break;default:return -EINVAL;}return arg; }struct file_operations led_fops = {.owner = THIS_MODULE,.unlocked_ioctl = led_ioctl };int __init chrdev_init(void) {int major = CHRDEV_MAGOR;int minor = CHRDEV_MINOR;int i = 0;alloc_chrdev_region(&dev, CHRDEV_MINOR, CHRDEV_NUM, CHRDEV_NAME);major = MAJOR(dev);minor = MINOR(dev);printk(KERN_EMERG "major = %d\nminor = %d\n", major, minor);cdev_init(&led_cdev, &led_fops);cdev_add(&led_cdev, dev, CHRDEV_NUM);for (i = 0; i < ARRAY_SIZE(leds); i++) {gpio_request(leds[i].gpio, leds[i].name);gpio_direction_output(leds[i].gpio, HIGH);}return 0; }void __exit chrdev_exit(void) {int i = 0;for (i = 0; i < ARRAY_SIZE(leds); i++) {gpio_free(leds[i].gpio);}cdev_del(&led_cdev);unregister_chrdev_region(dev, CHRDEV_NUM);return ; }module_init(chrdev_init); module_exit(chrdev_exit);【4】编写Makefile
vim Makefile
obj-m += ioctl.o KERNEL_PATH=/home/zjd/s5p6818/KERNEL/kernel ROOTFS_PATH=/nfs_share/_installall:make -C $(KERNEL_PATH) M=$(PWD) modulescp *.ko $(ROOTFS_PATH)clean:make -C $(KERNEL_PATH) M=$(PWD) clean【5】编译工程
make
【6】下位机安装模块
【7】编写应用层程序
mkdir test
cd test
vim led_test.c
#include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> #include <string.h> #include <sys/ioctl.h> #include <stdlib.h>#define ON 0 #define OFF 1 #define CDEV_PATH "/dev/myleds"int main(int argc, char *argv[]) {int fd = 0;int cmd = 0;int index = 0;if (argc < 3) {printf("Usage : %s <on/off> <1/2/3/4>\n", argv[0]);return -1;}if (!strcmp(argv[1], "on")) {cmd = ON;} else if (!strcmp(argv[1], "off")){cmd = OFF;} else {printf("illegal param\n");return -2;}index = atoi(argv[2]);if (index < 1 || index > 4) {printf("illegal param\n");return -2;}if((fd = open(CDEV_PATH, O_RDWR)) < 0) {perror("open()");return -3;}printf("open success!\n");ioctl(fd, cmd, &index);printf("closing...\n");close(fd);return 0; }vim Makefile
SRC=led_test.c OBJ=led_testARM_COMPILE=arm-cortex_a9-linux-gnueabi- GCC=gccROOTFS_PATH=/nfs_share/_installall:$(ARM_COMPILE)$(GCC) $(SRC) -o $(OBJ)cp $(OBJ) $(ROOTFS_PATH)clean:rm -rf $(OBJ)【8】编译工程
make
【9】下位机测试
手动创建设备文件
mknod /dev/myleds c 244 26
./led_test



相关文章:

Linux_kernel字符设备驱动12
一、字符设备的编程框架 在Linux_kernel驱动开发11中,我们介绍的系统调用。只是为了做一个实验,在真正开发时,我们并不会直接在内核中添加一个新的系统调用,这样做会导致内核体积变大。 1、字符设备结构体 我们实现一个硬件字符设…...

服务保护sentinel
线程隔离 - 线程池隔离:给每个服务调用业务分配一个线程池,利用线程池本身实现隔离效果。 - 信号量隔离:不创建线程池,而是计数器模式,记录业务使用的线程数量,达到信号量上限时,禁止新的请求。…...

【ubuntu】Ubuntu20.04安装中文百度输入法
1.download 百度Linux输入法-支持全拼、双拼、五笔 2.unzip unzip Ubuntu_Deepin-fcitx-baidupinyin-64.zip 3.setting 3.1 setting fcitx sudo apt install aptitude sudo aptitude install fcitx-bin fcitx-table fcitx-config-gtk fcitx-frontend-all sudo aptitude in…...

蓝桥杯【物联网】零基础到国奖之路:十八. 扩展模块之光敏和AS312
蓝桥杯【物联网】零基础到国奖之路:十八.扩展模块之光敏和AS312 第一节 硬件解读第二节 CubeMX配置第二节 代码 第一节 硬件解读 光敏和AS312如下图: 光敏电阻接到了扩展模块的5号引脚,5号引脚接了2个电阻,R8和光敏电阻。我们通过ADC读取这…...

如何在微信小程序中实现分包加载和预下载
如何在微信小程序中实现分包加载和预下载 概述 微信小程序提供了分包加载和预下载功能,这有助于优化应用的加载时间,提升用户体验。本文将详细介绍如何在微信小程序中配置分包加载和预下载。 步骤一:配置分包加载 修改app.json文件&#x…...

初识TCP/IP协议
回顾上文 来回顾一下TCP协议的特性,有一道比较经典的题:如何使用UDP实现可靠传输,通过应用程序的代码,完成可靠传输的过程? 原则,TCO有啥就吹啥,引入滑动窗口,引入流量控制&#x…...

使用 classification_report 评估 scikit-learn 中的分类模型
介绍 在机器学习领域,评估分类模型的性能至关重要。scikit-learn 是一个功能强大的 Python 机器学习工具,提供了多种模型评估工具。其中最有用的函数之一是 classification_report,它可以全面概述分类模型的关键指标。在这篇文章中ÿ…...

高翔【自动驾驶与机器人中的SLAM技术】学习笔记(十)高翔书中的细节:参考链接;卫星导航;ESKF
一、 参考链接 我认真查找了好多地方:结果在最后一页。 作者GITHUB链接如下: https://github.com/gaoxiang12/slam_in_autonomous_driving 全书所有参考链接 :如下 1 https://www.sae.org/standards/content/j3016_202104 2 http://www.evinchina.com/articleshow-217.htm…...

【在Python中爬取网页信息并存储】
在Python中爬取网页信息并存储的过程通常涉及几个关键步骤:发送HTTP请求、解析HTML内容、提取所需数据,以及将数据存储到适当的格式中(如文本文件、CSV文件、数据库等)。以下是一个更详细的指南,包括示例代码ÿ…...

ESP32 Bluedroid 篇(1)—— ibeacon 广播
前言 前面我们已经了解了 ESP32 的 BLE 整体架构,现在我们开始实际学习一下Bluedroid 从机篇的广播和扫描。本文将会以 ble_ibeacon demo 为例子进行讲解,需要注意的一点是。ibeacon 分为两个部分,一个是作为广播者,一个是作为观…...

【通配符】粗浅学习
1 背景说明 首先要注意,通配符中的符号和正则表达式中的特殊符号具备不同的匹配意义,例如:*在正则表达式中表示里面是指匹配前面的子表达式0次或者多次,而在通配符领域则是表示代表0个到无穷个任意字符。 此外,要注意…...

Spring MVC 常用注解
目录 基础概念 常用注解介绍 基础概念 1、MVC :代表一种软件架构设计思想,通俗的理解:客户端发送请求到后台服务器的Controller(C),控制器调用Model(M)来处理业务逻辑,处理完成后,返回处理后的数据到Vie…...

水泵模块(5V STM32)
目录 一、介绍 二、传感器原理 1.尺寸介绍 2.继电器控制水泵电路原理图 三、程序设计 main.c文件 bump.h文件 bump.c文件 四、实验效果 五、资料获取 项目分享 一、介绍 水泵模块(bump)通常是指用于液体输送系统的组件,它负责将水或其他流体从低处提…...

需求6:如何写一个后端接口?
这两天一直在对之前做的工作做梳理总结,不过前两天我都是在总结一些bug的问题。尽管有些bug问题我还没写文章,但是,我今天不得不先停下对bug的总结了。因为在国庆之后,我需要自己开发一个IT资产管理的功能,这个功能需要…...
:文件权限控制及文件操作相关的命令)
《Linux从小白到高手》理论篇(五):文件权限控制及文件操作相关的命令
本篇介绍Linux文件权限控制及文件操作相关的命令,看完本文,有关Linux文件权限控制及文件操作相关的常用命令你就掌握了99%了。 文件权限 在介绍文件权限之前先来复习下Linux的文件类型,始终记住那句话:Linux系统下,一…...
异常场景分析
优质博文:IT-BLOG-CN 为了防止黑客从前台异常信息,对系统进行攻击。同时,为了提高用户体验,我们都会都抛出的异常进行拦截处理。 一、异常处理类 Java把异常当做是破坏正常流程的一个事件,当事件发生后,…...

Leetcode: 0001-0010题速览
Leetcode: 0001-0010题速览 本文材料来自于LeetCode solutions in any programming language | 多种编程语言实现 LeetCode、《剑指 Offer(第 2 版)》、《程序员面试金典(第 6 版)》题解 遵从开源协议为知识共享 版权归属-相同方式…...
计算机的错误计算(一百一十二)
摘要 计算机的错误计算(六十三)与(六十八)以及(六十九)分别探讨了大数与 附近数以及 附近数 的余切函数的计算精度问题。本节讨论余切序列(即迭代 )的计算精度问题。 余切序列是指…...
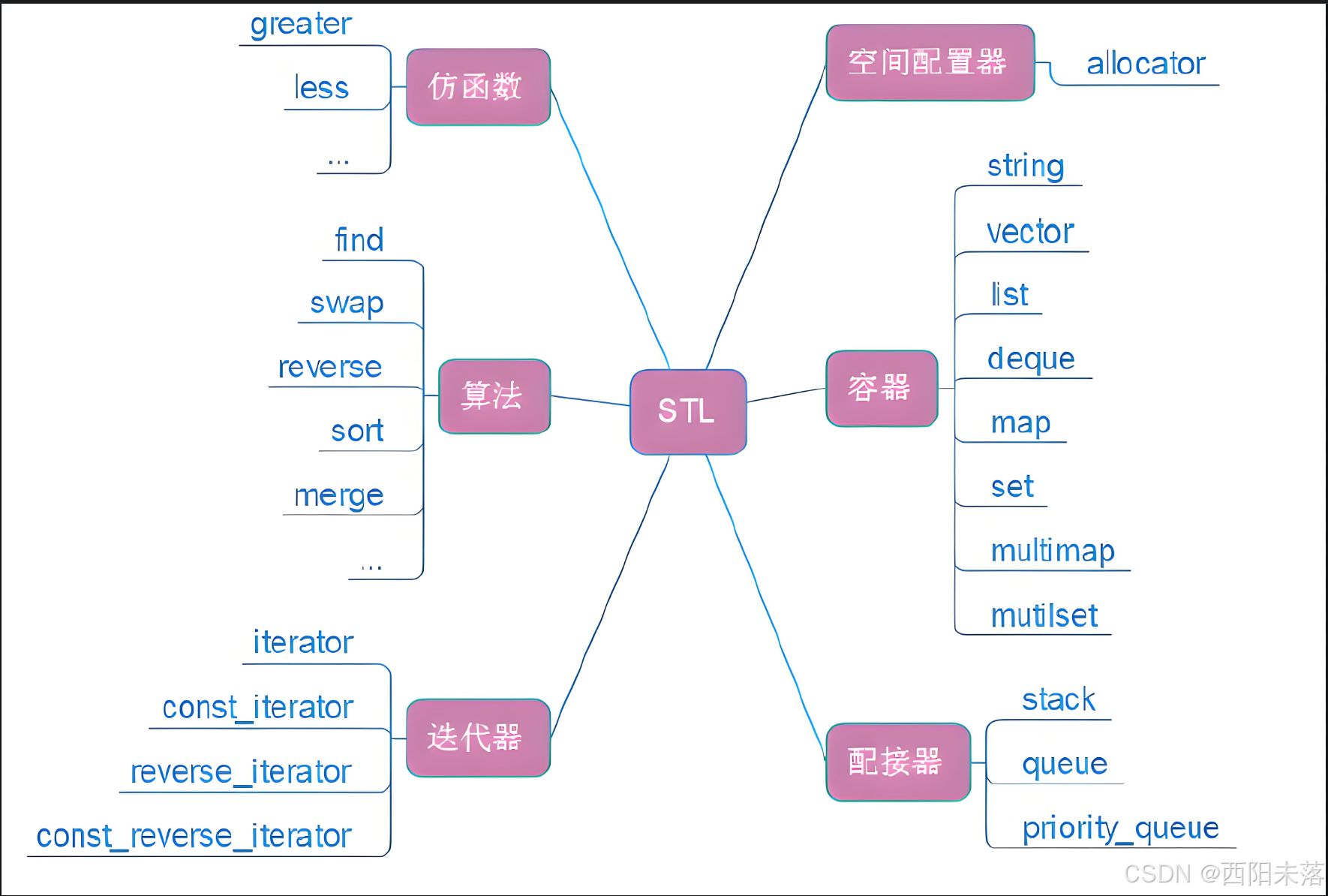
C++基础(7)——STL简介及string类
目录 1.STL简介 1.1什么是 1.2STL的历史版本 1.3STL的六大组件 编辑 1.4有用的网址 2.string类 2.1string的多种定义方式 2.2string的插入 2.2.1尾插(push_back) 2.2.2insert插入 2.3拼接(append) 2.4删除 2.4.1尾…...

配置Nginx以支持通过HTTPS回源到CDN
要配置Nginx以支持通过HTTPS回源到CDN,你需要确保Nginx已正确配置SSL,并且能够处理来自CDN的HTTPS请求。以下是一个简化的Nginx配置示例,它配置了SSL并设置了代理服务器参数以回源到CDN: server {listen 443 ssl;server_name you…...

从DesignCon 2011看EDA技术演进:高速链路、低功耗与3D-IC设计启示
1. 从一场行业盛会看电子设计的未来风向每年年初,硅谷的心脏地带——加州圣克拉拉,都会迎来一场电子设计自动化(EDA)与半导体设计领域的年度盛事:DesignCon。对于像我这样在硬件设计领域摸爬滚打了十几年的工程师来说&…...

Helm 2到Helm 3迁移实战:深入解析helm-2to3插件原理与操作指南
1. 项目概述与背景 如果你和我一样,在Kubernetes生态里摸爬滚打了几年,那你一定对Helm这个“包管理器”又爱又恨。爱的是它用声明式的Chart把复杂的应用部署变得像 helm install 一样简单;恨的是版本升级带来的“阵痛”,尤其是从…...

AutoResearchClaw:基于LLM的自动化研究管线,从想法到论文的工程化实践
1. 项目概述:从“聊个想法”到“生成论文”的自动化研究革命如果你是一名科研工作者、研究生,或者任何需要产出高质量学术内容的人,你肯定经历过这样的痛苦:一个绝妙的研究想法在脑海中诞生,但随之而来的是海量的文献调…...

Multi-Agent 智能办公场景落地:财务、法务、人力的自动协作链路
Multi-Agent 智能办公场景落地:财务、法务、人力的自动协作链路 关键词 Multi-Agent 协作、业财法税一体化、智能办公自动化、大模型Agent编排、跨域规则引擎、RPA增强架构、企业数字员工 摘要 当前中大型企业普遍存在跨部门协作摩擦成本高、规则执行不一致、合规风险不可…...

Shell脚本错误处理实战:用sh-guard提升Bash脚本健壮性
1. 项目概述:一个为Shell脚本穿上“防护服”的守护者在Linux运维、自动化部署乃至日常的系统管理工作中,Shell脚本是我们最得力的助手。从简单的日志清理到复杂的CI/CD流水线,Shell脚本无处不在。然而,脚本的健壮性却常常被忽视。…...

机器人伦理工程化:从道德困境到可解释决策系统的技术实现
1. 项目概述:当机器人需要做出道德抉择十年前,当我在实验室里调试一台协作机器人的碰撞检测算法时,一个从未预想过的问题出现了:在一条狭窄的通道里,机器人的移动路径上同时出现了一位匆忙的工程师和一个价值百万的实验…...

QMCDecode:解锁QQ音乐加密文件,让音乐真正属于你
QMCDecode:解锁QQ音乐加密文件,让音乐真正属于你 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,…...

示波器平均值功能实战:从噪声中精准提取电机故障信号
1. 项目概述:用示波器诊断模型火车电机故障作为一名在电子工程领域摸爬滚打了十几年的老工程师,我手边最离不开的工具,除了万用表,就是示波器。很多人觉得示波器是研发实验室里的高端设备,离日常维修很远,但…...
)
LeetCode 1665.完成所有任务的最少初始能量:排序(贪心)
【LetMeFly】1665.完成所有任务的最少初始能量:排序(贪心) 力扣题目链接:https://leetcode.cn/problems/minimum-initial-energy-to-finish-tasks/ 给你一个任务数组 tasks ,其中 tasks[i] [actuali, minimumi] : actuali 是完…...

[STM32U3] 【每周分享】【STM32U385RG 测评】+串口发送、接收数据
上篇串口通讯只是打印叔数据,这篇更进一步,将串口发送什么,就打印什么出来 一、查看原理图,确定自己需要的串口信息 还是一样的串口1 二、开始配置软件 上面基础配置结束之后,增加DMA以及NVIC配置 时钟可以根据自…...