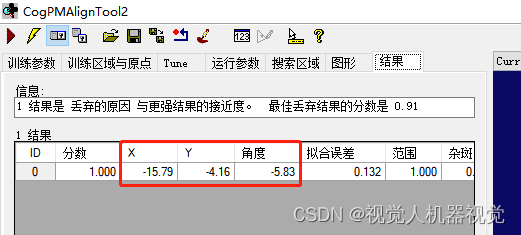
康耐视visionpro-机器视觉定位引导-经验总结-来自视觉人粉丝分享
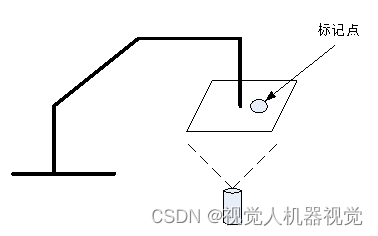
1、机器人吸取电路板,移动到拍照位置,并在电路板上找一个标记点,并且,通过机器人示教把当前电路板能够准确的放入到目标位置。
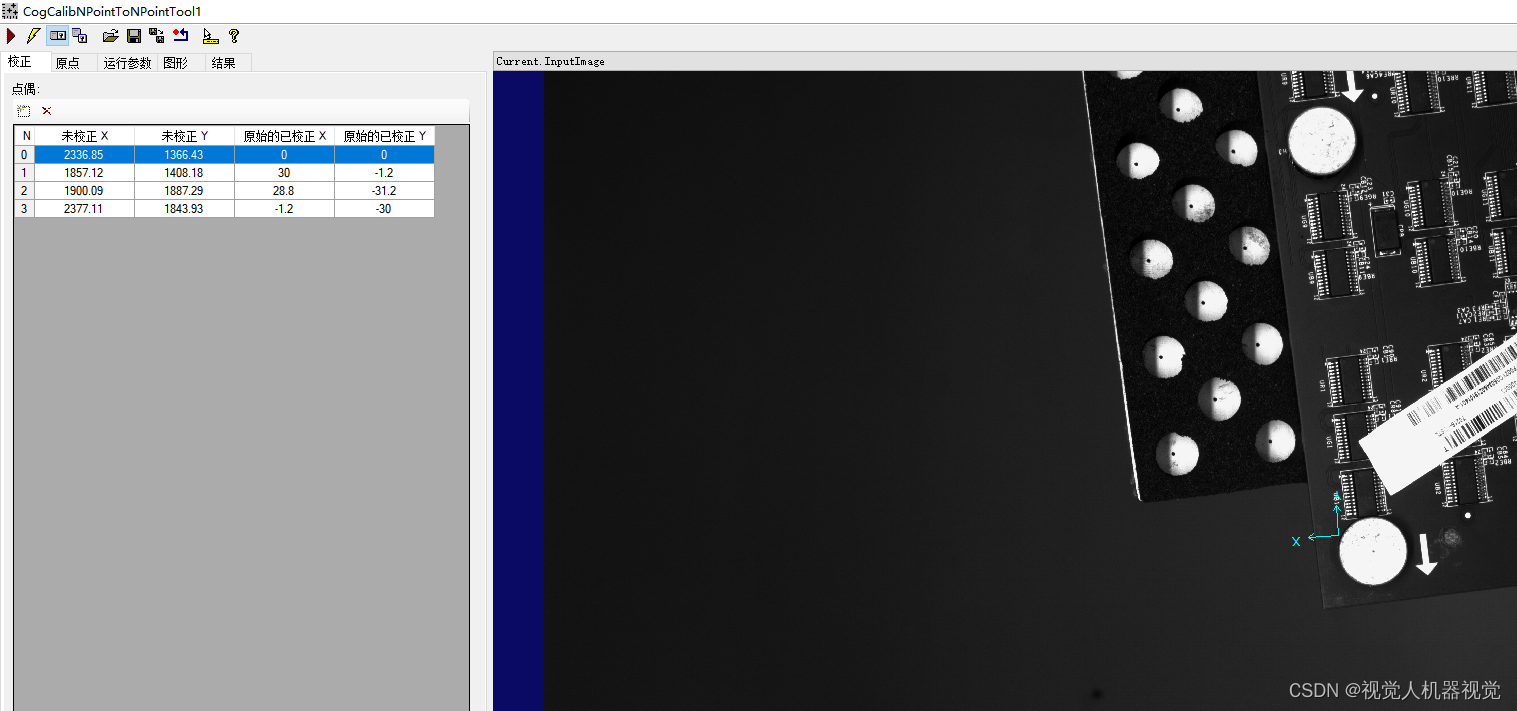
2、机器人吸取电路板吸取电路板,在x,y方向进行移动,总共移动4个位置,记录4个位置的机器人的坐标,以及拍摄图像
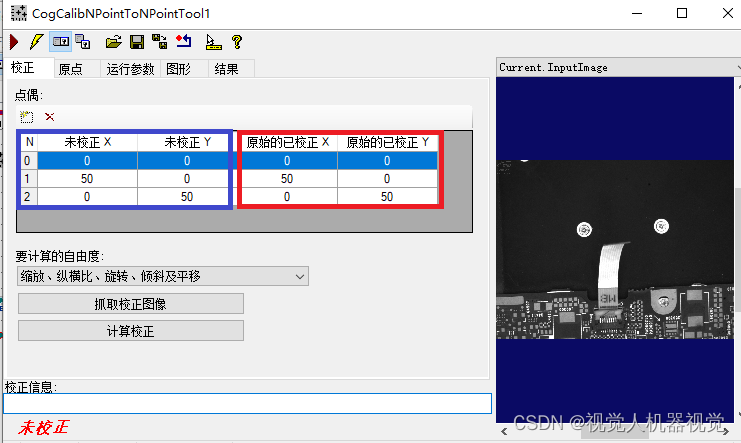
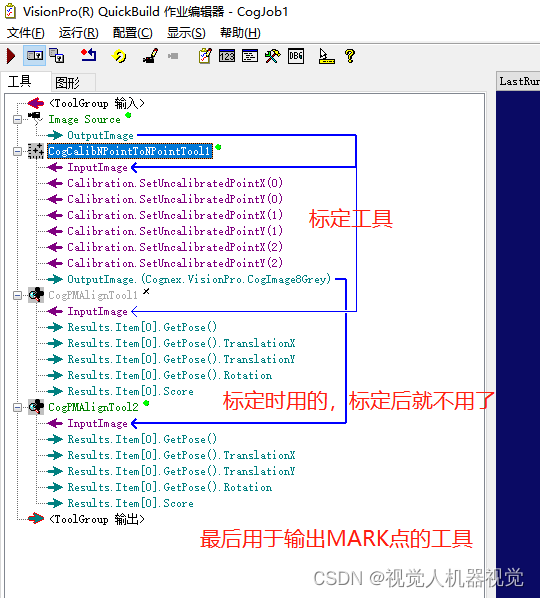
3、使用vp的CogCalibNpointToNpoint工具,并在蓝框填入标志点的像素坐标,红框填入对应的机器人坐标。
4.点运行完成标定功能。
5、完成标定后,整个流程如下
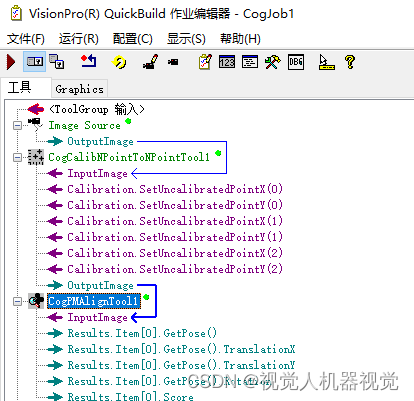
在模板匹配中把模板中心进行记录。然后,调整标定工具的校正原点
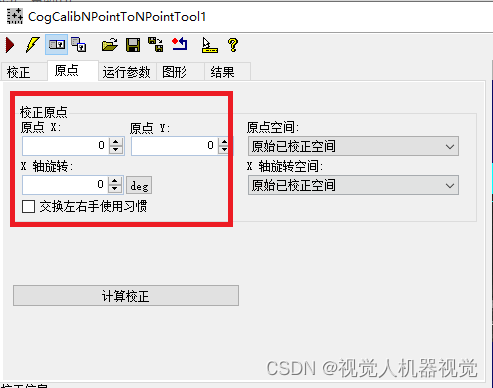
使得模板匹配的模板中心x,y坐标输出为0,0,表示当前吸取的电路板能够准确的放入模板位置
下次,再吸取电路板时,执行模板匹配后,输出的x,y坐标就是机器人应当移动的x,y的偏移量
这样x y 就计算完成了。
但往往,因为还有旋转。所以还要计算角度
机器人不用旋转中心进行标定
旋转中心标定方式的说明
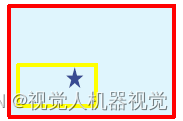
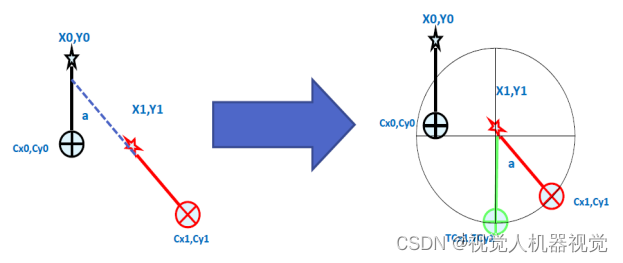
在下面的图例中,红色为相机视野(FOV),黄色为工件,五星为Mark点。

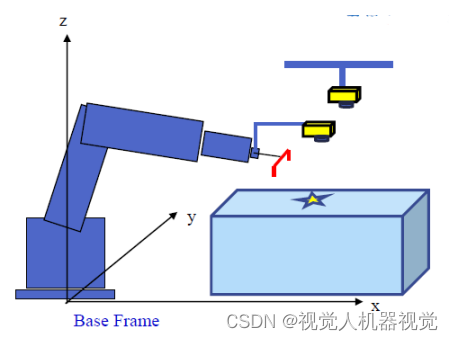
旋转中心方法用于所有机器人与视觉配合场景
方法 :计算工件实际发生的偏移量 和旋转,结合机器人的旋转中心进行二次补偿后 ,把补偿量 发送给机器人 ,然后机器人把补偿量进行抓取或放置即可。
计算 某个点绕另外一旋转定角度后的坐 标,如图 :A(x,y)绕 B(rx0 ,ry0) 旋转a度后的位置为 C(x0,y0 ),则有如 下关系式:
x0= cos (a) * (x -rx0) – sin (a) *(y-ry0) +rx0
y0= cos (a) * (y- ry0) + sin (a) (x-rx0) +ry0
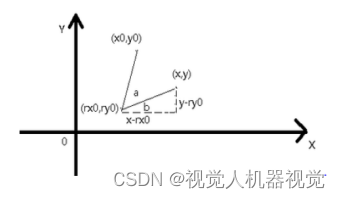
下面的所有计算旋转与偏移量都是基于上面的公式。
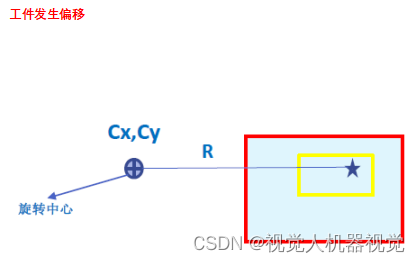
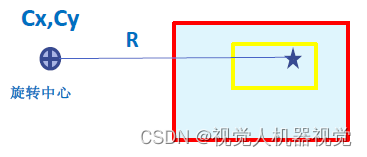
{Cx,Cy } 旋转中心坐标; {Mx,My } 工件 Mark坐标。
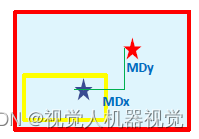
{MDx,MDy},Mark偏移量。
{RDx,Rdy}, 发送给机器人的补偿量。
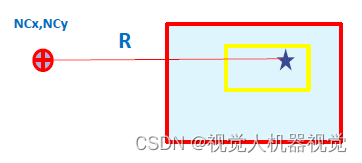
工件发生平移时,
在拍照位置进行拍照后 ,与开始训练标准位置时,Mark点成像会产生偏移。
Mark 偏移量 MDx =RDx;MDy =RDy ;
如上图即相机计算出的 Mark 点偏移量 ,可以直接补偿给机器人,然后进行抓取即可。
作为测试 ,可以机器人在拍照位置进行补偿后 ,Z轴不变然后再拍照 ,会获得和拍照位置一样的图像。
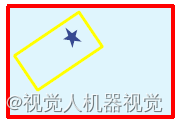
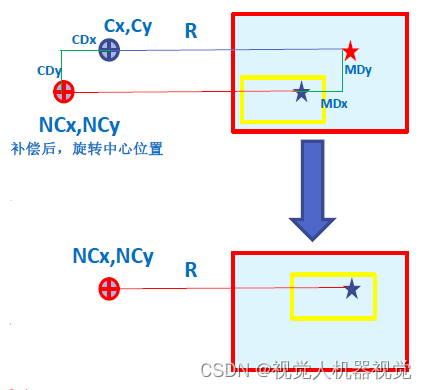
工件发生平移与旋转
工件发生平移和旋转时
在拍照位置进行后 ,与开始训练标准位置时 ,Mark 点成像会产生偏移;
Mark 偏移量 MDx #RDx, MDy#RDy ;如左上图即相机计算出的 MarkMark 点偏移量 ,不能直接补偿给机器人 ,需要计算出 RDx 和RDy,和RDr ,MDr 然后补偿给机器人 ,机器人补偿后才能进行抓取。
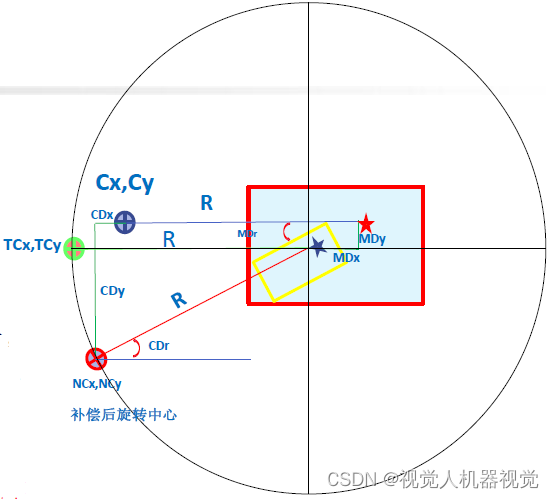
作为测试 ,可以机器人在拍照位置进行补偿后 ,Z轴不变然后再拍照 ,会获得和拍照位置一样的图像;
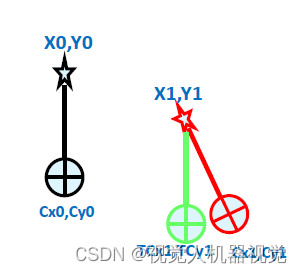
计算过程,旋转角度a
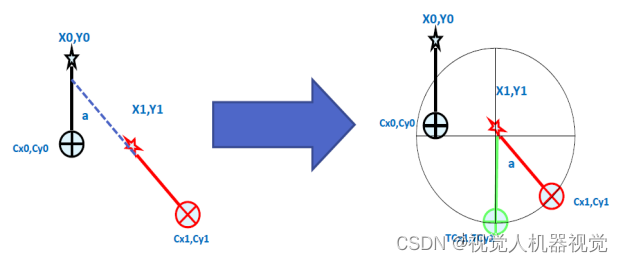
计算 CDx =Cx1– Cx0和 CDy =Cy1– Cy0
CDx = cos (a) * (Cx0 -X0) -sin (a) * Cy0-Y0) + X1 – Cx0
CDy = cos (a) * (Cy0 -Y0 ) + sin (a) * Cx0 -X0 ) + Y1– Cy0
从公式中可以看出,补给机器人的偿量由:
旋转中心坐标( Cx0,Cy0 )
标准的工件 (Mark) 坐标点( X0,Y0)
工件移动后新的(Mark)坐标点
工件 (Mark) 旋转角度 a
所以利用旋转中心方法计算给机器人的补偿量时,首先要中心坐标,
但是在很多场景下计算旋转中心坐标时要么出了视野,要么转的角度范围太小等,拟合旋中心都存在误差,
导致补偿精不够
一定要计算旋转中心坐标吗?其实不需要。
CDx,Cdy 计算过程 ,旋转角度 a
CDx = cos (a) * (Cx0 -X0) -sin (a) * (Cy0 -Y0) + X1 – Cx0
= ( cos (a) -1) * (Cx0-X0)-Sin(a)(Cy0 -Y0) + MDx
= (cos(a) -1) * StDx -sin (a) * StDy + MDx
CDy = cos ( a) * (Cy0 -Y0 ) + sin (a) * (Cx0 -X0 ) +y1 – Cy0
= ( cos (a) -1) * (Cy0 -Y0 ) + sin (a) * (Cx0 -X0 ) + Mdy
= (cos(a) -1) * StDy + sin (a) * StDx + Mdy
从公式中可以看出 StDx= Cx0-X0, StDy = Cy0 -Y0 是个常量, MDx 和Mdy是每次拍照是工件 (Mark )的坐标与准位置工件( Mark)的差值;
StDx 与StDy 怎么计算呢?蓝色的为一个二元次方程,我们需要旋转角度即可计算出;
如果 计算出 StDx 和StDy 则在运行时,直接带入上述公式,可以很快计算出 CDx,Cdy 这样给出Robot 的偏移量了,而不需要计算旋转中心确切坐标了
下面介绍如何求解 StDx和StDy
实际操作的时候,感觉上面的文章有点难理解,就还是老老实实去算了圆心,例如让机器人旋转正15度,和负15度,得到两个新的坐标。3点求圆心坐标。
点求圆心:
struct POINT
{ public double X;public double Y; } POINT RotateCenterCal(POINT p1, POINT p2, POINT p3, POINT ptCenter){//将三点代入圆的方程double a = 2 * (p2.X - p1.X);double b = 2 * (p2.Y - p1.Y);double c = p2.X * p2.X + p2.Y * p2.Y - p1.X * p1.X - p1.Y * p1.Y;double d = 2 * (p3.X - p2.X);double e = 2 * (p3.Y - p2.Y);double f = p3.X * p3.X + p3.Y * p3.Y - p2.X * p2.X - p2.Y * p2.Y;ptCenter.X = (b * f - e * c) / (b * d - e * a);ptCenter.Y = (d * c - a * f) / (b * d - e * a);return ptCenter;}
之后可以根据圆心 以及当前取得到的坐标以及旋转量,倒推得到要旋转多少角度和移动多少坐标才能回正。
CDx = cos (a) * (Cx0 -X0) -sin (a) * Cy0-Y0) + X1 – Cx0
CDy = cos (a) * (Cy0 -Y0 ) + sin (a) * Cx0 -X0 ) + Y1– Cy0
从公式中可以看出,补给机器人的偿量由:
旋转中心坐标( Cx0,Cy0 )
标准的工件 (Mark) 坐标点( X0,Y0)
工件移动后新的(Mark)坐标点
工件 (Mark) 旋转角度 a
代码: private void button3_Click(object sender, EventArgs e)
{ //根据圆心坐标 与角度, 以及原先的X,Y, 求旋转角度后的新坐标
POINT p1 = new POINT();
POINT p2 = new POINT();
POINT presult = new POINT();
p1.X = double.Parse(lastX.Text);p1.Y = double.Parse(lastY.Text);double jiaodu = double.Parse(lastjiaodu.Text);jiaodu = -jiaodu;// jiaodu = jiaodu * 180 / Math.PI; 无需转换成度数p2.X = double.Parse(centerX.Text);p2.Y = double.Parse(centerY.Text);presult = FindNEWXandY(p1, p2, presult, jiaodu);resultX.Text = presult.X.ToString();resultY.Text = presult.Y.ToString();}POINT FindNEWXandY(POINT p1, POINT p2,POINT presult,double jiaodu){//根据圆心坐标 与 原先的X,Y, 求旋转角度后的新坐标//jiaodu = (Math.PI *jiaodu/180);double mc = Math.Cos(jiaodu);double ma = Math.Sin(jiaodu);double a1 = (p1.X - p2.X) * mc;double b1 = (p1.Y - p2.Y) * ma;presult.X =Math.Round(a1 - b1 + p2.X,3);double a2= (p1.Y - p2.Y) * mc;double b2 = (p1.X - p2.X) * ma;presult.Y = Math.Round(a2 + b2 + p2.Y,3);return presult;}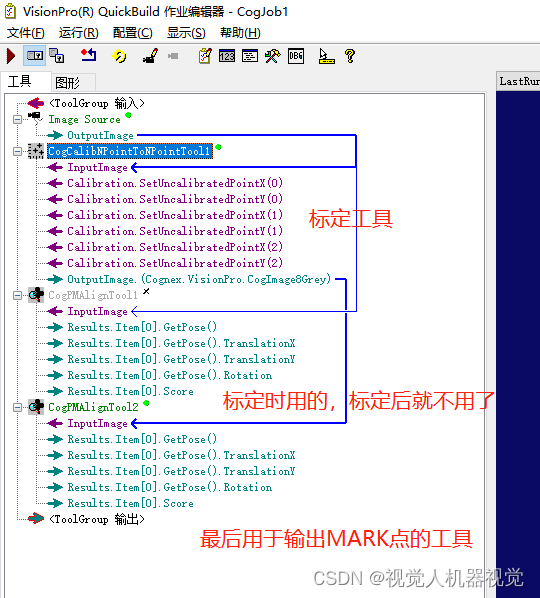
因为当时使用的机器人精度较查,误差还是挺大的。如果项目成型,则会有最终解决方案,目前只是配合测试。先到此结束
相关文章:
康耐视visionpro-机器视觉定位引导-经验总结-来自视觉人粉丝分享
1、机器人吸取电路板,移动到拍照位置,并在电路板上找一个标记点,并且,通过机器人示教把当前电路板能够准确的放入到目标位置。 2、机器人吸取电路板吸取电路板,在x,y方向进行移动,总共移动4个位置ÿ…...

包管理工具npm
一:package.json 在某个文件路径下,执行 npm init。就会生成package.json文件。大致如下: {"name": "test","version": "1.0.0","description": "测试","main": &q…...

ChatGPT正进军各行各业,抓住机遇,拥有无限的可能性。
每一个新技术的出现都会对各行各业产生冲击,但关键在于如何抓住这个机遇。ChatGPT是一项非常具有前途的技术,它可以在许多领域为人们提供更好的服务和体验。这项技术的优势之一是它可以快速而准确地理解和解释自然语言,从而使人们可以更轻松地…...
Maven 多模块管理
多模块管理简单地理解就是一个 Java 工程项目中不止有一个 pom.xml 文件,会在不同的目录中有多个这样的文件,进而实现 Maven 的多模块管理 在多人使用Maven协作开发项目时,尤其是稍微上点规模的项目,每个RD的工作都细分到具体功能…...

crash 内核调试工具 ps 指令 显示的进程状态 RU, IN, UN, ZO, ST, TR, DE, SW, WA, PA 什么意思
crash> help ps | grep "the task state" 5. the task state (RU, IN, UN, ZO ,ST, TR, DE, SW, WA, PA, ID, NE) 参考linux-4.19.113内核源码(include/linux/sched.h),有如下定义 /** Task state bitmask. NOTE! These bits…...

Spring《二》bean的实例化与生命周期
🍎道阻且长,行则将至。🍓 上一篇:Spring《一》快速入门 下一篇:Spring《三》DI依赖注入 目录一、bean实例化🍍1.构造方法 ***2.静态工厂 *使用工厂创建对象实例化bean3.实例工厂 ***使用示例工厂创建对象实…...

java与kotlin 写法区别
原文链接:https://gitcode.net/mirrors/mindorksopensource/from-java-to-kotlin?utm_sourcecsdn_github_accelerator#assigning-the-null-value Print to Console 打印到控制台 Java System.out.print("Amit Shekhar"); System.out.println("Amit…...

服务器运行深度学习代码使用指南
该内容配置均在九天毕昇下配置。 当前系统使用的linux版本为:Ubuntu 18.04 LTS。 当前版本安装的是:cuda10.1。 九天毕昇平台:https://jiutian.10086.cn/edu/#/home 一、linux下运行python的操作 ls 为列出当前目录中的文件 cd 文件名 进入…...
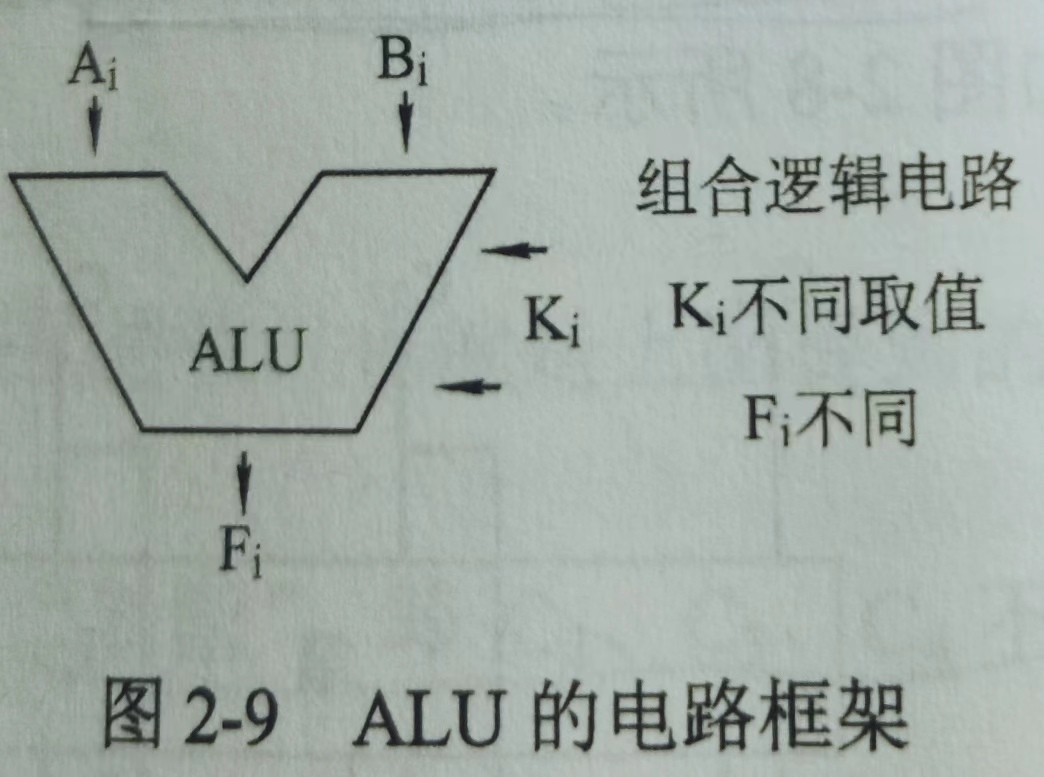
计算机组成原理 - 2. 数据的表示和运算
整理自天勤高分笔记,购书链接: 24 天勤高分笔记 要记住的几个数字 📓: 215327682^{15} 3276821532768 216655362^{16} 6553621665536 23121474836482^{31} 21474836482312147483648 23242949672962^{32} 4294967296232429496…...

【js】基础知识点--语句,break和continue,switch,with,for..in,do-while,while
一、break和continue语句,常用 break 语句会立即退出循环,强制继续执行循环后面的语句。而 continue 语句虽然也是立即退出循环,但退出循环后会从循环的顶部继续执行 var num 0; for (var i1; i < 10; i) {if (i % 5 0) {break;}num; …...
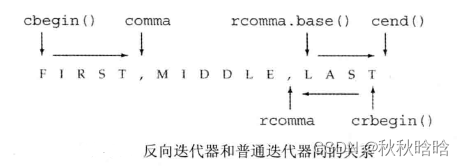
【C++】迭代器
内容来自《C Primer(第5版)》9.2.1 迭代器、9.2.3 begin和end成员、9.3.6 容器操作可能使迭代器失效、10.4.3 反向迭代器 目录 1. 迭代器 1.1 迭代器范围 1.2 使用左闭合范围蕴含的编程假定 2. begin和end成员 3. 容器操作可能使迭代器失效 3.1 编…...

数据可视化在前端中的应用
前端开发中,数据可视化是一种非常重要的技术。它可以将复杂的数据以图形化的方式展示出来,让用户更容易理解和分析数据。在前端中,VUE是一种非常流行的JavaScript框架,可以用来实现各种数据可视化效果。 首先,让我们来看看一些常见的数据可视化方式: 表格:表格是数据可…...

FFmpeg 合并视频文件没声音,不同步原因
查了不少帖子也没搞明白,可能懂的人不会遇到吧。 1 没声音是因为我几个视频文件中,有的没音轨,就是用文字生成了个视频,需要先给它加个dummy的音轨才行。 2 视频不同步是因为各个视频格式不一样,参数挺多我也不知道具…...
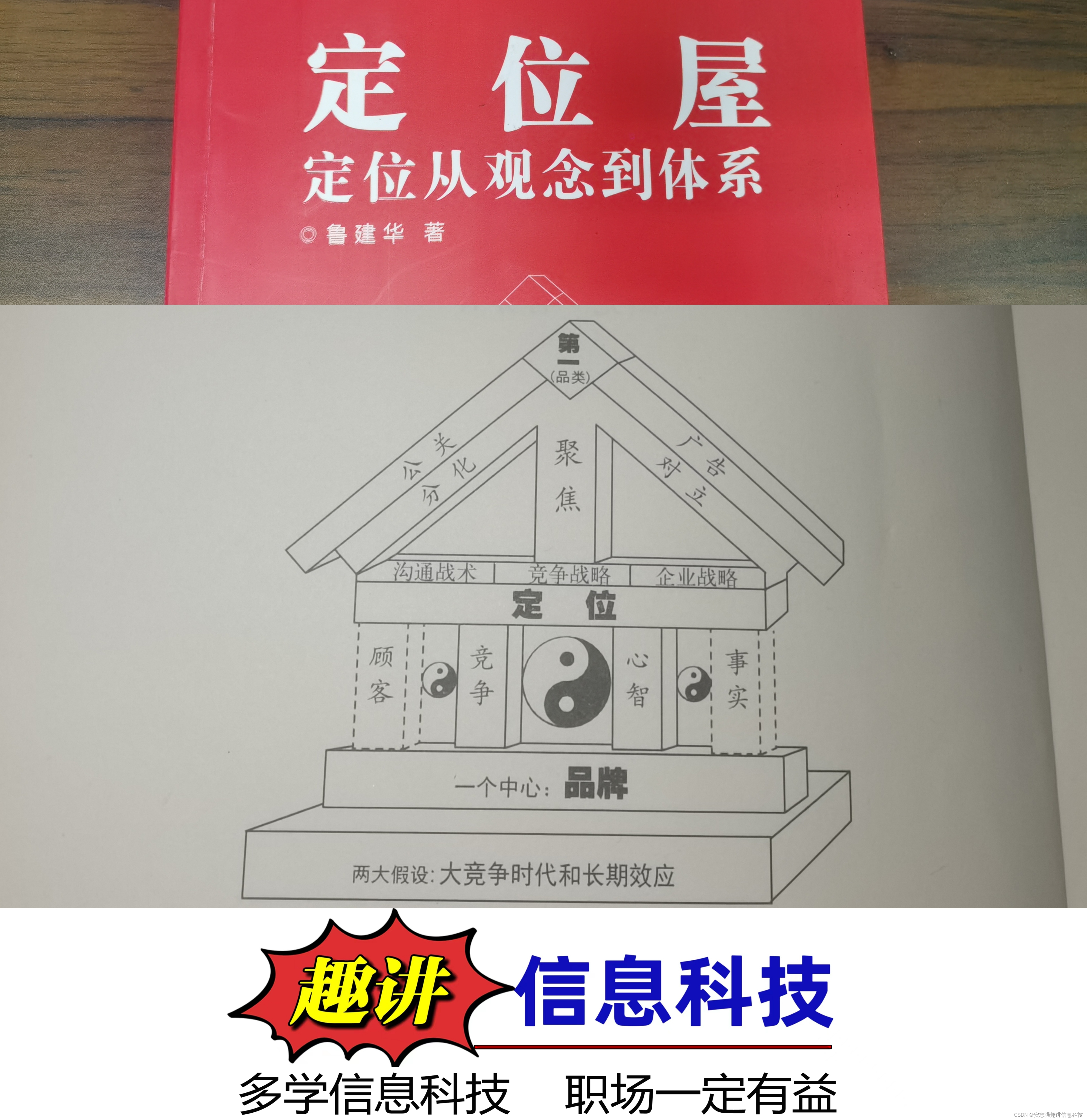
绕不开的“定位”
绕开“定位”这个词谈企业战略和品牌 相当于揪住头发离开地球 定位这个词,已经进入商业界的心智中去了 发明这个词的特劳特和里斯的思想有啥差异? 《定位屋》刨析的很到位 趣讲大白话:把握概念的源头,就理解对了大部分 【趣讲信息…...
《Effective Objective-C 2.0 》 阅读笔记 item12
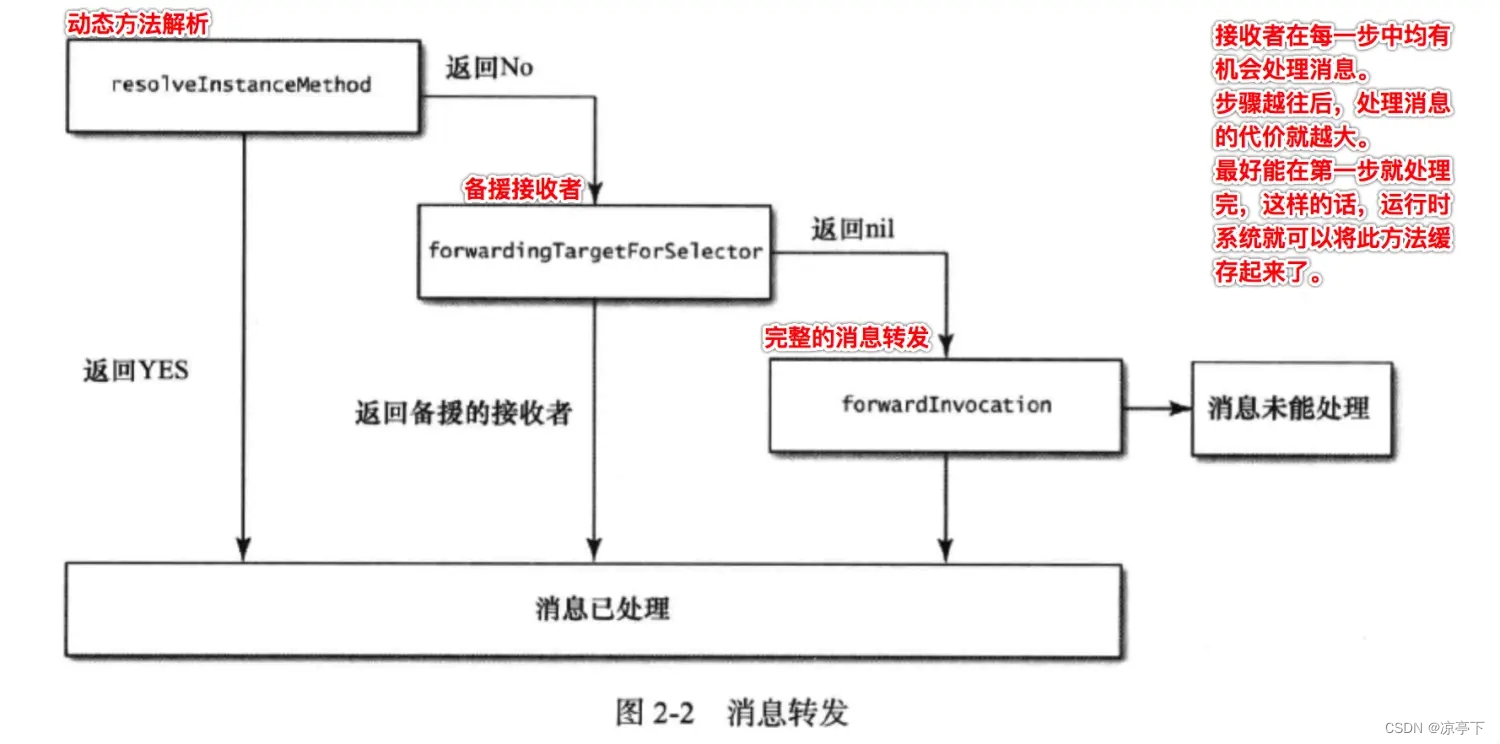
第12条:理解消息转发机制 1. 消息转发机制 当对象接收到无法解读的消息后,就会启动“消息转发”机制,开发者可经由此过程告诉对象应该如何处理未知消息。 消息转发分为两大阶段 第一阶段:先征询接收者所属的类,看其…...

云原生计算能消除技术债务吗?
云原生计算可以将行业领域驱动的设计、GitOps和其他现代软件最佳实践汇总起来,如果企业实施得当,可以减少技术债务。 云原生计算是企业IT的一种新范式,它涉及现代技术的方方面面,从应用程序开发到软件架构,再到保持一…...

9. 回文数
题目 给你一个整数 xxx ,如果 xxx 是一个回文整数,返回 truetruetrue ;否则,返回 falsefalsefalse 。回文数是指正序(从左向右)和倒序(从右向左)读都是一样的整数。 例子 输入&am…...

[SV]SystemVerilog线程之fork...join专题
SystemVerilog线程之fork...join专题 Q:fork-join_none开辟的线程在外部任务退出后也会结束吗? A:后台线程不会结束,任何由fork开辟的线程(join、join_any、join_none),无论其外部任务ÿ…...
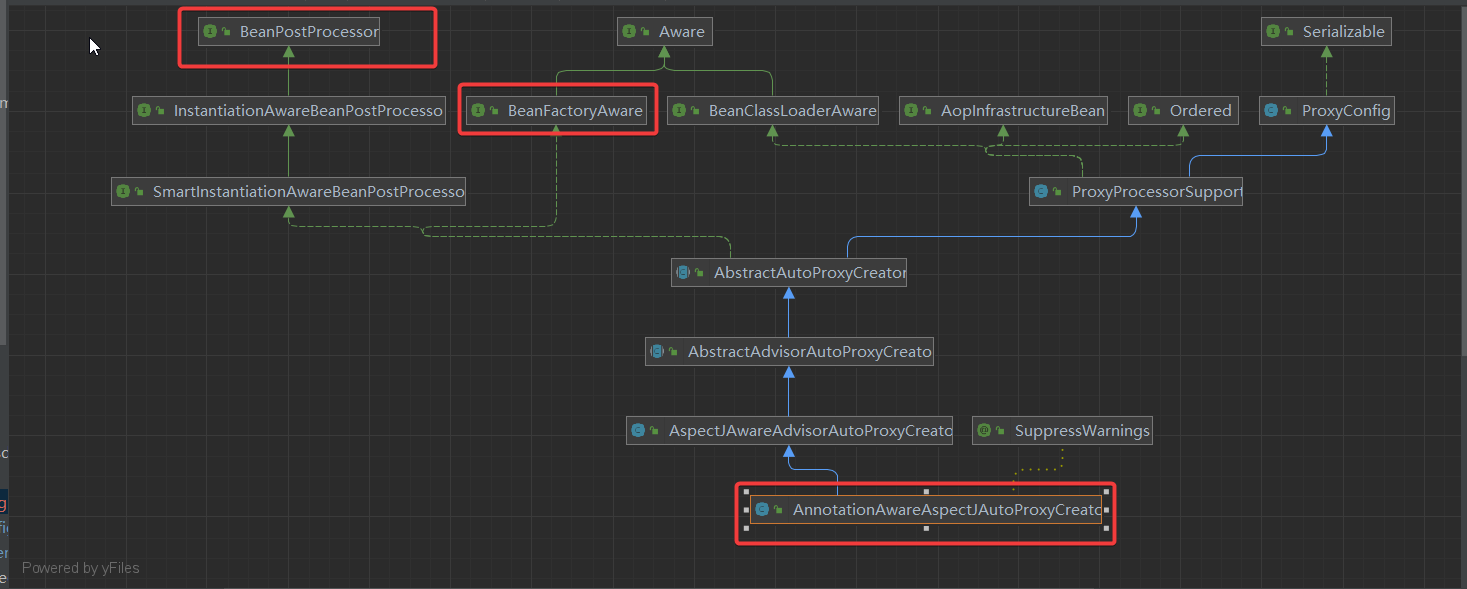
你看这个spring的aop它又大又宽
aop🚓AOP 分类AspectJ | 高级但是难用Spring AOP | 易用但仅支持方法aop 原理明月几时有,把酒问青天。——唐代李白《将进酒》 AOP 分类 在 Spring Boot 中,AOP 的实现主要有以下几种: 基于 AspectJ 的 AOP:这是一种基…...

设计模式-创建-单例模式
4.1.1 模式介绍 定义 单例模式(Singleton Pattern)是 Java 中最简单的设计模式之一,此模式保证某个类在运行期间,只有一个实例对外提供服务,而这个类被称为单例类。 作用 保证一个类只有一个实例为该实例提供一个全…...
)
Lindy AI Agent工作流安全合规红线(GDPR+等保3.0双认证实操清单)
更多请点击: https://intelliparadigm.com 第一章:Lindy AI Agent工作流安全合规红线总览 Lindy AI Agent 作为面向企业级场景的智能体编排平台,其工作流在设计、部署与运行全生命周期中必须严格遵循数据安全、模型可解释性、访问控制及监管…...

别再问STM32哪个型号有DAC了!一张图看懂F1/F4/L1系列DAC配置差异与选型避坑
STM32全系列DAC选型指南:从F1到L1的深度对比与实战避坑 当你的项目需要精确模拟输出时,STM32的DAC功能往往成为关键选择因素。但面对ST公司庞大的产品线,即使是经验丰富的工程师也常陷入选型困惑——为什么同系列不同封装的芯片DAC配置不同&a…...

终极iOS弹窗解决方案SDCAlertView:10个强大功能超越系统UIAlertController
终极iOS弹窗解决方案SDCAlertView:10个强大功能超越系统UIAlertController 【免费下载链接】SDCAlertView The little alert that could 项目地址: https://gitcode.com/gh_mirrors/sd/SDCAlertView SDCAlertView是一款强大的iOS弹窗解决方案,它为…...

3个创新视角:重新定义AMD平台内存监控的新范式
3个创新视角:重新定义AMD平台内存监控的新范式 【免费下载链接】ZenTimings 项目地址: https://gitcode.com/gh_mirrors/ze/ZenTimings 在AMD Ryzen平台的性能调优领域,内存时序监控一直是个技术门槛较高的领域。传统监控工具往往停留在表面参数…...

实测taotoken多模型聚合端点的响应延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测taotoken多模型聚合端点的响应延迟与稳定性表现 作为开发者,在将大模型能力集成到应用时,除了功能本身…...

Windows外接显示器亮度控制终极指南:使用Twinkle Tray轻松解决Windows系统限制
Windows外接显示器亮度控制终极指南:使用Twinkle Tray轻松解决Windows系统限制 【免费下载链接】twinkle-tray Easily manage the brightness of your monitors in Windows from the system tray 项目地址: https://gitcode.com/gh_mirrors/tw/twinkle-tray …...

性价比高的AI应用厂家
核心结论: 当前市面上AI应用厂商众多,但真正能做到“高性价比”的,必须同时满足三个条件:功能覆盖企业核心痛点(管理、销售、运营)、落地效果可量化(降本增效有数据支撑)、成本可控&…...

如何用LRCGET歌词下载神器一键解决数千首离线音乐歌词同步难题
如何用LRCGET歌词下载神器一键解决数千首离线音乐歌词同步难题 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否拥有一个庞大的离线音乐库&#x…...

ZipCPU/dspfilters:轻量级C++ IIR滤波器库的设计原理与嵌入式应用
1. 项目概述:从零开始理解一个数字信号处理滤波器库最近在整理一些嵌入式音频处理的项目,又翻出了ZipCPU/dspfilters这个仓库。这其实是一个在GitHub上存在了相当一段时间的C数字信号处理(DSP)滤波器库,由ZipCPU&#…...

如何快速掌握Java-Callgraph2:静态调用图分析的完整指南
如何快速掌握Java-Callgraph2:静态调用图分析的完整指南 【免费下载链接】java-callgraph2 Programs for producing static call graphs for Java programs. 项目地址: https://gitcode.com/gh_mirrors/ja/java-callgraph2 你是否曾经在复杂的Java项目中迷失…...