视觉检测开源库-功能包框架搭建
chapt9/chapt9_ws/src,接着在目录下新建 yolov5_ros2 功能包,并添加相关依赖,完整命令如下:
ros2 pkg create yolov5_ros2 --build-type ament_python --dependencies rclpy yolov5 cv_bridge sensor_msgs vision_msgs cv2 --license Apache-2.0
接着在 chapt9_ws/src/yolov5_ros2/yolov5_ros2 下新建 yolov5_ros2.py ,编写如下代码:
import rclpy
from rclpy.node import Node
from rcl_interfaces.msg import ParameterDescriptorclass YOLOv5Ros2(Node):def __init__(self):super().__init__('yolov5_ros2')# 声明ROS参数,用于配置YOLOv5节点的行为self.declare_parameter("device", "cpu", ParameterDescriptor(name="device", description="计算设备选择,默认:cpu,可选:cuda:0"))self.declare_parameter("model_path", "", ParameterDescriptor(name="model_path", description="YOLOv5模型路径,默认为空"))self.declare_parameter("image_topic", "/image", ParameterDescriptor(name="image_topic", description="输入图像话题,默认:/image_raw"))self.declare_parameter("pub_result_image", False, ParameterDescriptor(name="pub_result_img", description="是否发布识别结果图像,默认:False"))# 获取ROS参数的值self.device = self.get_parameter('device').valueself.model_path = self.get_parameter('model_path').valueself.image_topic = self.get_parameter('image_topic').valueself.pub_result_image = self.get_parameter('pub_result_image').valuedef pub_result(self, result, header):"""发布YOLOv5的识别结果Args:result: YOLOv5的识别结果数据header: ROS消息头信息"""# TODO: 实现识别结果的发布逻辑def pub_result_with_image(self, result, image, header):"""发布包含识别结果的图像Args:result: YOLOv5的识别结果数据image: 包含识别结果的图像数据header: ROS消息头信息"""# TODO: 实现包含识别结果的图像发布逻辑def image_callback(self, msg):"""处理输入图像的回调函数Args:msg: 输入图像消息"""# TODO: 实现输入图像的处理逻辑def main():rclpy.init()rclpy.spin(YOLOv5Ros2())rclpy.shutdown()if __name__ == "__main__":main()
我们创建了一个名为 YOLOv5Ros2 的节点类,并在 init 函数中声明计算设备 device、模型路径 model_path、图像话题 image_topic 和是否发布结果图像 pub_result_image 四个参数。接着又在函数体中定义了两个结果发布函数和一个图像回调函数以备使用。需要考虑当用户并没有提供预训练模型时,我们可以使用一个默认的模型替代,所以我们需要放置一个预训练模型到我们的功能包中,在 chapt9_ws/src/yolov5_ros2/ 下新建 config 目录,然后将 yolov5n.pt 复制到该目录下。接着我们可以修改 setup.py 对该节点进行注册并拷贝模型文件到 install 目录,主要修改代码如下:
from setuptools import find_packages, setup
from glob import glob
import ospackage_name = 'yolov5_ros2'setup(...data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),(os.path.join('share', package_name, 'config'), glob('config/**')),('share/' + package_name, ['package.xml']),],...entry_points={'console_scripts': ["yolov5_ros2=yolov5_ros2.yolov5_ros2:main"],},
)
相关文章:

视觉检测开源库-功能包框架搭建
chapt9/chapt9_ws/src,接着在目录下新建 yolov5_ros2 功能包,并添加相关依赖,完整命令如下: ros2 pkg create yolov5_ros2 --build-type ament_python --dependencies rclpy yolov5 cv_bridge sensor_msgs vision_msgs cv2 --lic…...

pytest的基础入门
pytest判断用例的成功或者失败 pytest识别用例失败时会报AssertionError或者xxxError错误,当捕获异常时pytest无法识别到失败的用例 pytest的fixture夹具 pytest的参数化 #coding:utf-8 import pytestfrom PythonProject.pytest_test.funcs.guess_point import ge…...

(31)非零均值信号的时域分析:均值、方差、与功率
文章目录 前言一、使用MATLAB生成余弦波并画图二、计算信号的均值、方差、与功率三、结果分析 前言 本文对叠加了直流分量的一段整周期余弦信号进行时域分析,使用MATLAB进行信号生成,并计算其均值、方差、与功率。最后给出对计算结果的分析,…...

架设传奇SF时提示此服务器满员,GEE引擎点开始游戏弹出服务器满员的解决方法
昨天一个朋友在架设GEE的传奇服务端时遇到一个奇怪的问题,就是在服务器外网架设时,建好角色点开始游戏提示此服务器满员,这个问题一般比较少见,而且出现的话一般都是GEE引擎的版本。 他折腾了半天,一直没进游戏&#x…...

QT day06
在QT使用数据库实现学生管理系统 头文件: #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QSqlDatabase> #include <QSqlQuery> #include <QSqlRecord> QT_BEGIN_NAMESPACE namespace Ui { class Widget; } QT_END_NAME…...

微信小程序-npm支持-如何使用npm包
文章目录 1、在内建终端中打开2、npm init -y3、Vant Weapp4、通过 npm 安装5、构建 npm 1、在内建终端中打开 Windows PowerShell 版权所有 (C) Microsoft Corporation。保留所有权利。尝试新的跨平台 PowerShell https://aka.ms/pscore6PS C:\Users\dgq\WeChatProjects\minip…...

Spring Cloud Stream 3.x+kafka 3.8整合
Spring Cloud Stream 3.xkafka 3.8整合,文末有完整项目链接 前言一、如何看官方文档(有深入了解需求的人)二、kafka的安装tar包安装docker安装 三、代码中集成创建一个测试topic:testproducer代码producer配置(配置的格式,上篇文章…...

JavaScript中的数组
1.数组的概念 数组可以把一组相关的数据一起存放,并提供方便的访问/获取方式数组是指一组数据的集合,其中每个数据称之为元素(element),在数组中可以存放任意类型的元素,数组是一种将一组数据存储在单个变量名下的优雅方式。 2.…...
)
UE5运行时动态加载场景角色动画任意搭配-场景角色相机动画音乐加载方法(三)
1、将场景打包为Pak并加载 1、参考这篇文章将场景打包为pak,UE4打包并加载Pak-Windows/iOS/Android不同平台Editor/Runtime不同运行模式兼容 2、在Mount Pak后直接打开Map即可 void UMapManager::OpenMap(FString Path) {UWorld* World = UGlobalManager::GetInstance()->…...

c# 中 中文、英文、数字、空格、标点符号占的字符大小
在C#中,中文、英文、数字、空格和标点符号在不同编码下所占的字节大小是不一样的。常见的编码有UTF-8、UTF-16、GB2312等。以下是在不同编码下各种字符类型所占的字节大小: UTF-8: 中文字符:3个字节 英文字符:1个字…...

前端_003_js扫盲
文章目录 var,let,const严格模式数据类型运算符事件常用对象函数绑定call() ,apply(),bind() 闭包浏览器中事件循环回调和异步Promiseasync和await DOMBOMAjax var,let,const let是var的升级版本,对于块作用域,var无法进行限制,let不会存在该…...

ValueError: You cannot perform fine-tuning on purely quantized models.
在使用peft 微调8bit 或者4bit 模型的时候,可能会报错: You cannot perform fine-tuning on purely quantized models. Please attach trainable adapters on top of the quantized model to correctly perform fine-tuning. Please see: https://huggi…...

DELL R720服务器阵列数据恢复,磁盘状态为Foreign
服务器无法正常进入系统,物理磁盘状态变成了Foreign 虚拟磁盘状态变成了Failed 阵列已经丢失了,需要手工强制导入外部配置 单击 Main Menu 屏幕上的 Configuration Management。单击 Manage Foreign Configuration 单击 Preview Foreign Configurati…...

VMDK 0X80BB0005 VirtualBOX虚拟机错误处理-数据恢复——未来之窗数据恢复
打开虚拟盘文件in7.vmdk 失败. Could not get the storage format of the medium 7\win7.vmdk (VERR_NOT_SUPPORTED). 返回 代码:VBOX_E_IPRT_ERROR (0X80BB0005) 组件:MediumWrap 界面:IMedium {a a3f2dfb1} 被召者:IVirtualBox {768 cd607} 被召者 RC:VBOX_E_OBJECT_NOT_F…...
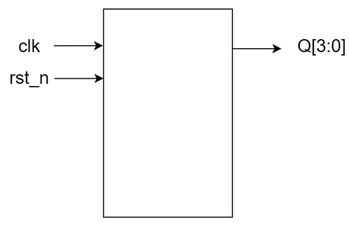
【Verilog学习日常】—牛客网刷题—Verilog企业真题—VL67
十六进制计数器 描述 请用Verilog设计十六进制递增计数器电路,每个时钟周期递增1。 电路的接口如下图所示。Q[3:0]中,Q[3]是高位。 接口电路图如下: 输入描述: input clk , input rst_n ,…...

51、AVR、ARM、DSP等常用芯片之对比
51芯片 51芯片通常指的是基于8051内核的单片机,这是一种经典的微控制器(MCU)。虽然关于51芯片的详细现代应用和发展可能因具体型号和厂商而有所不同,但基于8051内核的单片机通常具有以下特点: 结构经典:8…...

PostgreSQL 和Oracle 表压缩的对比
PostgreSQL 和Oracle 表压缩的对比 Oracle 和 PostgreSQL 在表压缩的性能方面存在显著差异,主要体现在实现方式、压缩效果、对系统性能的影响以及适用场景等方面。以下是对两者表压缩性能的详细对比: 1. 实现方式 Oracle 表压缩 Oracle 提供了多种压…...

【pyspark学习从入门到精通3】弹性分布式数据集_1
目录 RDD 的内部工作机制 创建 RDDs Schema 从文件中读取 弹性分布式数据集(RDDs)是一种分布式的不可变 JVM 对象集合,它允许你非常快速地执行计算,并且它们是 Apache Spark 的支柱。 顾名思义,数据集是分布式的&a…...

宠物健康监测仪健康守护者
在宠物护理领域,一款名为宠物健康监测仪的智能设备正逐渐成为宠物主人的新宠。这款设备不仅仅是一个简单的听诊器,它更像是宠物健康的智能管家,能够实时监测宠物的生理指标,并根据这些数据提供个性化的健康建议。 宠物健康监测仪…...

手写mybatis之解析和使用ResultMap映射参数配置
前言 学习源码是在学习什么呢? 就是为了通过这些源码级复杂模型中,学习系统框架的架构思维、设计原则和设计模式。在这些源码学习手写的过程中,感受、吸收并也是锻炼一种思维习惯,并尝试把这些思路技术迁移到平常的复杂业务设计开…...

PXE装机避坑大全:从TFTP根目录设置到Kickstart无人值守的13个常见错误修复
PXE装机避坑大全:从TFTP根目录设置到Kickstart无人值守的13个常见错误修复 在企业级IT运维中,PXE(预启动执行环境)网络装机技术因其高效、自动化的特点,已成为服务器批量部署的标配方案。但看似简单的PXE部署流程背后&…...

Rust Web开发:ActixWeb实战指南
1. 为什么选择ActixWeb进行Rust Web开发 我第一次接触ActixWeb是在三年前的一个电商项目里,当时团队需要处理每秒上万次的库存查询请求。测试了多个Rust框架后,ActixWeb凭借其卓越的性能表现脱颖而出——在同等硬件条件下,它的QPS(…...

使用ZLMRTCClient.j实现webRtc流播放
1. 核心播放器组件封装 (WebRTCPlayer.vue)为了在项目中复用播放逻辑,我们首先封装一个 WebRTCPlayer 组件。该组件主要负责:初始化播放器实例:配置 ZLMRTCClient.Endpoint。处理自动播放:解决浏览器禁止带音频自动播放的问题。生…...

OpCore-Simplify:让OpenCore EFI配置变得智能高效
OpCore-Simplify:让OpenCore EFI配置变得智能高效 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 问题引入:为什么Hackintosh配…...

如何快速掌握MelonLoader:从零基础到精通Unity游戏模组加载的完整教程
如何快速掌握MelonLoader:从零基础到精通Unity游戏模组加载的完整教程 【免费下载链接】MelonLoader The Worlds First Universal Mod Loader for Unity Games compatible with both Il2Cpp and Mono 项目地址: https://gitcode.com/gh_mirrors/me/MelonLoader …...

网络安全有哪些岗位,如何成为一位优秀的网络安全工程师?
网络安全是什么? 首先说一下什么是网络安全? 网络安全工程师工作内容具体有哪些? 网络安全是确保网络系统的硬件、软件及其系统中的数据受到保护,不因偶然的或者恶意的原因而受到破坏、更改、泄露,系统连续可靠正常地…...

SIFT算法二十年:为什么它仍是图像匹配的‘老兵’?对比ORB、SURF与深度学习特征
SIFT算法二十年:为什么它仍是图像匹配的‘老兵’? 在计算机视觉领域,特征提取与匹配一直是核心问题之一。从早期的传统算法到如今的深度学习模型,技术迭代层出不穷。然而,在这股浪潮中,SIFT(Sca…...

突破方舟生存进化技术壁垒的智能管理工具
突破方舟生存进化技术壁垒的智能管理工具 【免费下载链接】TEKLauncher Launcher for ARK: Survival Evolved 项目地址: https://gitcode.com/gh_mirrors/te/TEKLauncher 你是否曾因MOD安装顺序错误导致游戏频繁崩溃?是否在搭建私人服务器时被端口配置弄得晕…...

深度解析BG3ModManager:博德之门3模组加载顺序重置问题的架构设计与解决方案
深度解析BG3ModManager:博德之门3模组加载顺序重置问题的架构设计与解决方案 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModManager BG3ModManager作为《博德之门3》的核心模组管理…...

告别HEIC预览盲区:让Windows用户轻松驾驭苹果图像格式
告别HEIC预览盲区:让Windows用户轻松驾驭苹果图像格式 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails 问题场景࿱…...