Python实现火柴人的设计与实现
1.引言
火柴人(Stick Figure)是一种极简风格的图形,通常由简单的线段和圆圈组成,却能生动地表达人物的姿态和动作。火柴人不仅广泛应用于动画、漫画和涂鸦中,还可以作为图形学、人工智能等领域的教学和研究工具。本文旨在介绍如何使用Python实现火柴人的设计与绘制,通过编程的方式,让读者了解火柴人背后的基本原理和实现方法。
2.准备工作
在开始实现火柴人之前,你需要确保已经安装了Python环境,并且熟悉基本的Python编程知识。此外,为了绘制图形,我们将使用matplotlib库,这是一个强大的绘图库,适用于生成各种静态、动态和交互式的图表。
你可以通过以下命令安装matplotlib:
bash复制代码
pip install matplotlib3.基础理论知识
火柴人的绘制主要依赖于几何图形的绘制和变换。具体来说,我们需要:
(1)定义关节:火柴人的关节包括头部、肩膀、肘部、手腕、臀部、膝盖和脚踝等。这些关节可以看作二维或三维空间中的点。
(2)绘制线段:根据关节的位置,绘制连接关节的线段,这些线段构成了火柴人的骨骼。
(3)添加圆形:在头部等关节处添加圆形,以表示关节。
(4)变换与动画:通过变换关节的位置,可以实现火柴人的动作和动画效果。
4.步骤详解
下面,我们将逐步介绍如何使用Python和matplotlib绘制火柴人。
(1)导入库
首先,我们需要导入matplotlib库中的pyplot模块:
import matplotlib.pyplot as plt
import numpy as np(2)定义关节位置
为了简单起见,我们先在二维平面上定义火柴人的关节位置。这里以一个简单的火柴人站立姿势为例:
# 定义关节位置
head = [0, 1]
torso = [0, 0]
left_shoulder = [-0.5, 0]
left_elbow = [-1, -0.5]
left_hand = [-1, -1]
right_shoulder = [0.5, 0]
right_elbow = [1, -0.5]
right_hand = [1, -1]
left_hip = [-0.5, -0.5]
left_knee = [-1, -1.5]
left_foot = [-1, -2]
right_hip = [0.5, -0.5]
right_knee = [1, -1.5]
right_foot = [1, -2] # 将关节位置存储在一个字典中
joints = { 'head': head, 'torso': torso, 'left_shoulder': left_shoulder, 'left_elbow': left_elbow, 'left_hand': left_hand, 'right_shoulder': right_shoulder, 'right_elbow': right_elbow, 'right_hand': right_hand, 'left_hip': left_hip, 'left_knee': left_knee, 'left_foot': left_foot, 'right_hip': right_hip, 'right_knee': right_knee, 'right_foot': right_foot
}(3)绘制火柴人
接下来,我们编写一个函数,根据关节位置绘制火柴人:
def draw_stick_figure(joints, ax): # 绘制身体 body_parts = [ ('torso', 'head'), ('torso', 'left_shoulder'), ('left_shoulder', 'left_elbow'), ('left_elbow', 'left_hand'), ('torso', 'right_shoulder'), ('right_shoulder', 'right_elbow'), ('right_elbow', 'right_hand'), ('torso', 'left_hip'), ('left_hip', 'left_knee'), ('left_knee', 'left_foot'), ('torso', 'right_hip'), ('right_hip', 'right_knee'), ('right_knee', 'right_foot') ] for start, end in body_parts: start_pos = np.array(joints[start]) end_pos = np.array(joints[end]) ax.plot([start_pos[0], end_pos[0]], [start_pos[1], end_pos[1]], 'k-') # 绘制头部 circle = plt.Circle(joints['head'], 0.1, color='black', fill=True) ax.add_patch(circle) # 绘制手部(可选) circle = plt.Circle(joints['left_hand'], 0.05, color='black', fill=True) ax.add_patch(circle) circle = plt.Circle(joints['right_hand'], 0.05, color='black', fill=True) ax.add_patch(circle) # 绘制脚部(可选) circle = plt.Circle(joints['left_foot'], 0.05, color='black', fill=True) ax.add_patch(circle) circle = plt.Circle(joints['right_foot'], 0.05, color='black', fill=True) ax.add_patch(circle)(4)绘制并显示图形
最后,我们创建一个图形对象,调用绘制函数,并显示结果:
def main(): fig, ax = plt.subplots() ax.set_aspect('equal') ax.axis('off') # 关闭坐标轴 draw_stick_figure(joints, ax) plt.show() if __name__ == "__main__": main()5.常见问题解答
(1)火柴人看起来扭曲或比例不对:这通常是由于关节位置定义不合理或线段连接错误导致的。检查关节位置和连接顺序是否正确。
(2)图形显示不全:确保设置ax.set_aspect('equal'),使得图形按等比例显示。
(3)如何添加动画效果:可以使用matplotlib的FuncAnimation类,通过不断更新关节位置来实现动画效果。
6.成果案例分享
通过上述步骤,你已经成功绘制了一个简单的火柴人。接下来,我们可以尝试更复杂的姿势和动画效果。例如,通过改变关节位置,实现火柴人的跳跃、行走等动作。
下面是一个简单的动画示例,展示火柴人从左到右移动的过程:
import matplotlib.animation as animation def update_position(frame, joints): # 这里我们简单地将火柴人向右移动 translation = 0.1 * frame for key in joints.keys(): joints[key][0] += translation return joints def animate(frame): global joints_anim joints_anim = update_position(frame, joints_anim) ax.clear() ax.set_aspect('equal') ax.axis('off') draw_stick_figure(joints_anim, ax) def main_animation(): fig, ax = plt.subplots() global joints_anim joints_anim = {key: value.copy() for key, value in joints.items()} # 复制初始关节位置 ani = animation.FuncAnimation(fig, animate, frames=100, interval=100) plt.show() if __name__ == "__main__": main_animation()7.案例代码示例
以下是完整的代码示例,包括所有步骤和注释:
import matplotlib.pyplot as plt
import numpy as np
import matplotlib.animation as animation # 定义关节位置
joints = { 'head': [0, 1], 'torso': [0, 0], 'left_shoulder': [-0.5, 0], 'left_elbow': [-1, -0.5], 'left_hand': [-1, -1], 'right_shoulder': [0.5, 0], 'right_elbow': [1, -0.5], 'right_hand': [1, -1], 'left_hip': [-0.5, -0.5], 'left_knee': [-1, -1.5], 'left_foot': [-1, -2], 'right_hip': [0.5, -0.5], 'right_knee': [1, -1.5], 'right_foot': [1, -2]
} # 将关节位置转换为numpy数组,以便进行数学运算
joints = {key: np.array(value) for key, value in joints.items()} # 绘制火柴人的函数
def draw_stick_figure(joints, ax): # 清除之前的绘图 ax.clear() # 设置坐标轴的比例和限制 ax.set_aspect('equal') ax.set_xlim(-2, 2) ax.set_ylim(-2.5, 1.5) # 定义身体部分和对应的颜色(可选) body_parts = [ ('torso', 'head', 'black'), ('torso', 'left_shoulder', 'black'), ('left_shoulder', 'left_elbow', 'black'), ('left_elbow', 'left_hand', 'black'), ('torso', 'right_shoulder', 'black'), ('right_shoulder', 'right_elbow', 'black'), ('right_elbow', 'right_hand', 'black'), ('torso', 'left_hip', 'black'), ('left_hip', 'left_knee', 'black'), ('left_knee', 'left_foot', 'black'), ('torso', 'right_hip', 'black'), ('right_hip', 'right_knee', 'black'), ('right_knee', 'right_foot', 'black') ] # 绘制火柴人的各个部分 for part in body_parts: start_joint, end_joint, color = part[0], part[1], part[2] if len(part) > 2 else 'black' ax.plot([joints[start_joint][0], joints[end_joint][0]], [joints[start_joint][1], joints[end_joint][1]], color=color, linewidth=2) # 显示网格(可选) ax.grid(True) # 创建图形和坐标轴
fig, ax = plt.subplots() # 初始化函数(用于动画)
def init(): draw_stick_figure(joints, ax) return [] # 返回空列表,因为我们没有需要更新的艺术家对象 # 动画更新函数
def update(frame): # 这里可以添加使火柴人移动或改变姿势的逻辑 # 例如,简单地旋转手臂或腿 # 但为了简化,我们在这里不改变关节位置 draw_stick_figure(joints, ax) return [] # 同样返回空列表 # 创建动画
ani = animation.FuncAnimation(fig, update, frames=100, init_func=init, blit=True, interval=100) # 显示图形
plt.show()请注意以下几点:
(1)我将关节位置转换为了numpy数组,以便在需要时进行数学运算(虽然在这个简单的例子中并没有用到)。
(2)在draw_stick_figure函数中,我添加了设置坐标轴比例和限制的代码,以及一个可选的网格显示。
(3)在body_parts列表中,我添加了颜色参数,但在这个例子中,我默认使用了黑色。你可以根据需要更改颜色。
(4)在update函数中,我没有改变关节位置,因此火柴人在动画中保持静止。你可以根据需要添加逻辑来改变火柴人的姿势或位置。
(5)我使用了FuncAnimation来创建动画,并设置了100帧和每帧之间的间隔为100毫秒。你可以根据需要调整这些参数。
运行这段代码将显示一个包含静止火柴人的窗口,并且由于动画的设置,它会每隔100毫秒重新绘制一次(尽管看起来是静止的,因为关节位置没有改变,感兴趣的读者朋友可以尝试改变关节位置)。
相关文章:

Python实现火柴人的设计与实现
1.引言 火柴人(Stick Figure)是一种极简风格的图形,通常由简单的线段和圆圈组成,却能生动地表达人物的姿态和动作。火柴人不仅广泛应用于动画、漫画和涂鸦中,还可以作为图形学、人工智能等领域的教学和研究工具。本文…...
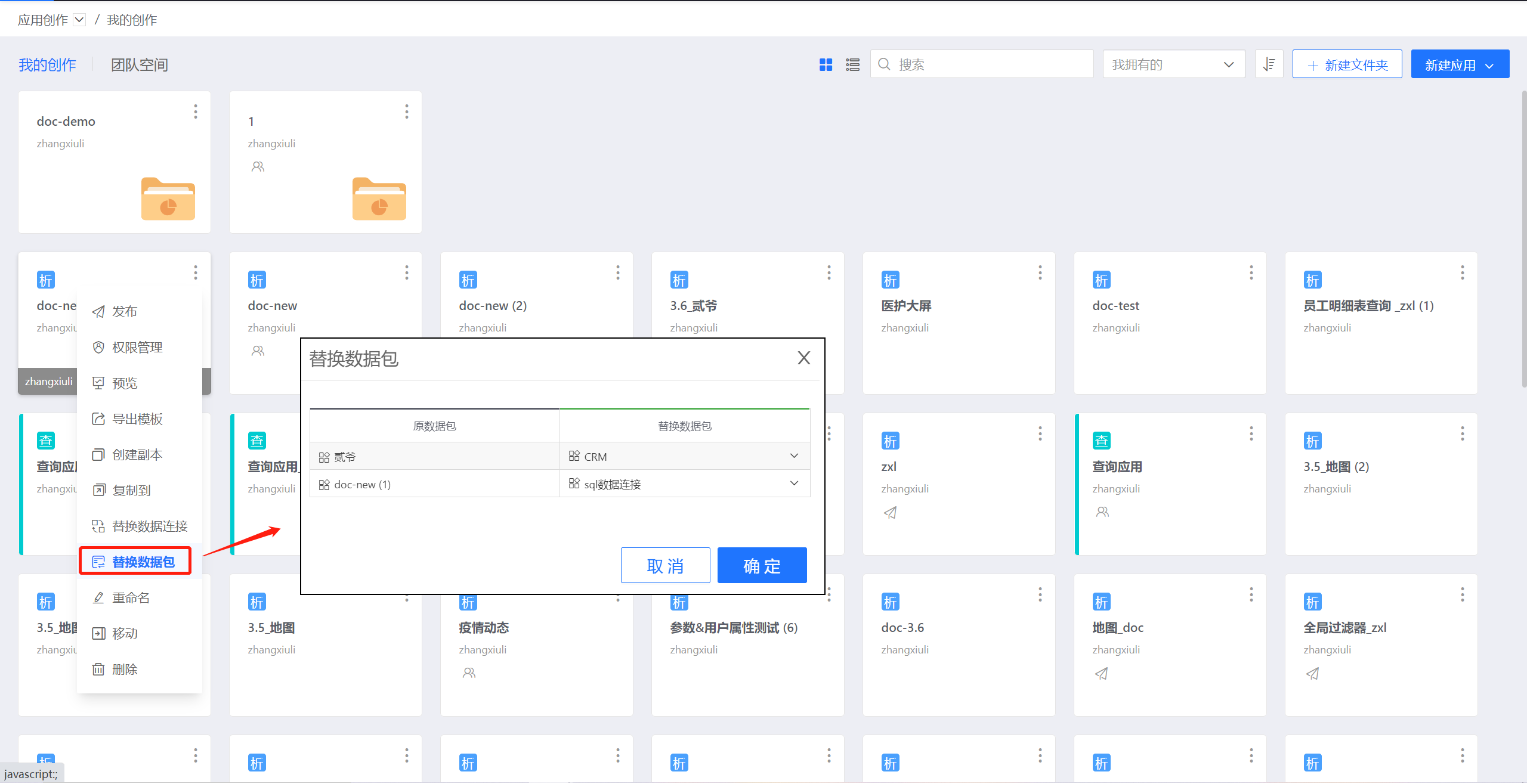
衡石分析平台系统分析人员手册-应用模版
应用模板 应用模板使分析成果能被快速复用,节省应用创作成本,提升应用创作效率。此外应用模板实现了应用在不同环境上快速迁移。 支持应用复制功能 用户可以从现有的分析成果关联到新的分析需求并快速完成修改。 支持应用导出为模板功能 实现多个用户…...

Git和SVN
一. Git和SVN的区别 1.1 Git是分布式的,SVN是集中式的 1.2 Git复杂概念多,SVN简单易上手 Git 的命令实在太多了,日常工作需要掌握 add, commit, status, fetch, push, rebase等,若要熟练掌握,还必须掌握 rebase和 m…...
宏与预处理 - <stddef.h> 和 <stdbool.h>)
【C语言教程】【常用类库】(十八)宏与预处理 - <stddef.h> 和 <stdbool.h>
18. 宏与预处理 - <stddef.h> 和 <stdbool.h> C语言的宏和预处理指令在程序编译之前就被执行,用于文件包含、符号定义、条件编译等操作。理解和运用宏和预处理可以提高代码的灵活性和可移植性。 18.1 宏定义与条件编译 18.1.1 #define 与参数化宏 #…...

订单超时过期的实现方案的探讨
在我们的业务开发中,会遇到这样一个场景,用户下了一个单,如果超过20分钟不进行支付,订单就要变成已取消状态。 字段设定 订单中需要设定了三个字段:订单是否取消、是否支付、支付超时时间。 订单是否取消会存在&…...

C++中的CRTP
CRTP,全称为 Curiously Recurring Template Pattern(奇异递归模板模式),是一种在C中使用继承和模板技术来实现静态多态和功能复用的惯用法。它使用派生类来模板参数化基类,使得基类能够访问派生类,从而在编…...

go压缩的使用
基础:使用go创建一个zip func base(path string) {// 创建 zip 文件zipFile, err : os.Create("test.zip")if err ! nil {panic(err)}defer zipFile.Close()// 创建一个新的 *Writer 对象zipWriter : zip.NewWriter(zipFile)defer zipWriter.Close()// 创…...

一图解千言,了解常见的流程图类型及其作用
在企业管理、软件研发过程中,经常会需要进行各种业务流程梳理,而流程图就是梳理业务时必要的手段,同时也是梳理的产出。但在不同的情况下适用的流程图又不尽相同。 本文我们就一起来总结一下8 种最常见的流程图类型 数据流程图 数据流程图&…...
】)
【微信小程序_19_自定义组件(1)】
摘要:本文主要介绍了小程序开发中自定义组件的相关知识。包括组件的创建与引用,可在项目根目录创建组件文件夹,生成相应文件,并根据使用频率选择全局或局部引用。还阐述了组件和页面的区别,如组件的.json 文件需声明 “component: true”,.js 文件调用 Component () 函数…...

标准版admin后台页面添加及开发操作流程及注意事项
基础介绍 CRMEB后台管理是基于vue2技术栈进行开发搭建的 Vue Router 使用的是v3版本,mode为history模式 如需修改 mode 请在src/setting.js中修改routerMode 新建页面 新建路由 根据目录结构,需要在src/router/modules中对应模块中,添加对…...

‘perl‘ 不是内部或外部命令,也不是可运行的程序 或批处理文件。
‘perl’ 不是内部或外部命令,也不是可运行的程序 或批处理文件。 明明已经根据教程安装了perl环境,但是在cmd中依赖报该错误,本章教程提供解决办法。 一、激活perl环境 state shell ActiveState-Perl-5.36.0此时输入perl -v 是可以直接输出perl版本号的。 二、找到perl的执…...

如何利用CMMI帮助组织消除低价值流程
CMMI发展到今天,过程中历经了不断的蜕变和升级。从早期的CMM到今天的CMMI3.0,从早期的22个过程域优化组合到今天的20个实践域,从早期隶属的SEI到今天的CMMI研究院,所有的变化都是与时俱进,都是为了提供更好的实践&…...

如何理解线程安全这个概念?
文章目录 为什么需要线程安全?线程安全的实现方式总结推荐阅读文章 线程安全(Thread Safety)是指在多线程环境中,多个线程同时访问某个对象时,不会导致程序出现错误的状态或不一致的结果。简单来说,线程安全…...

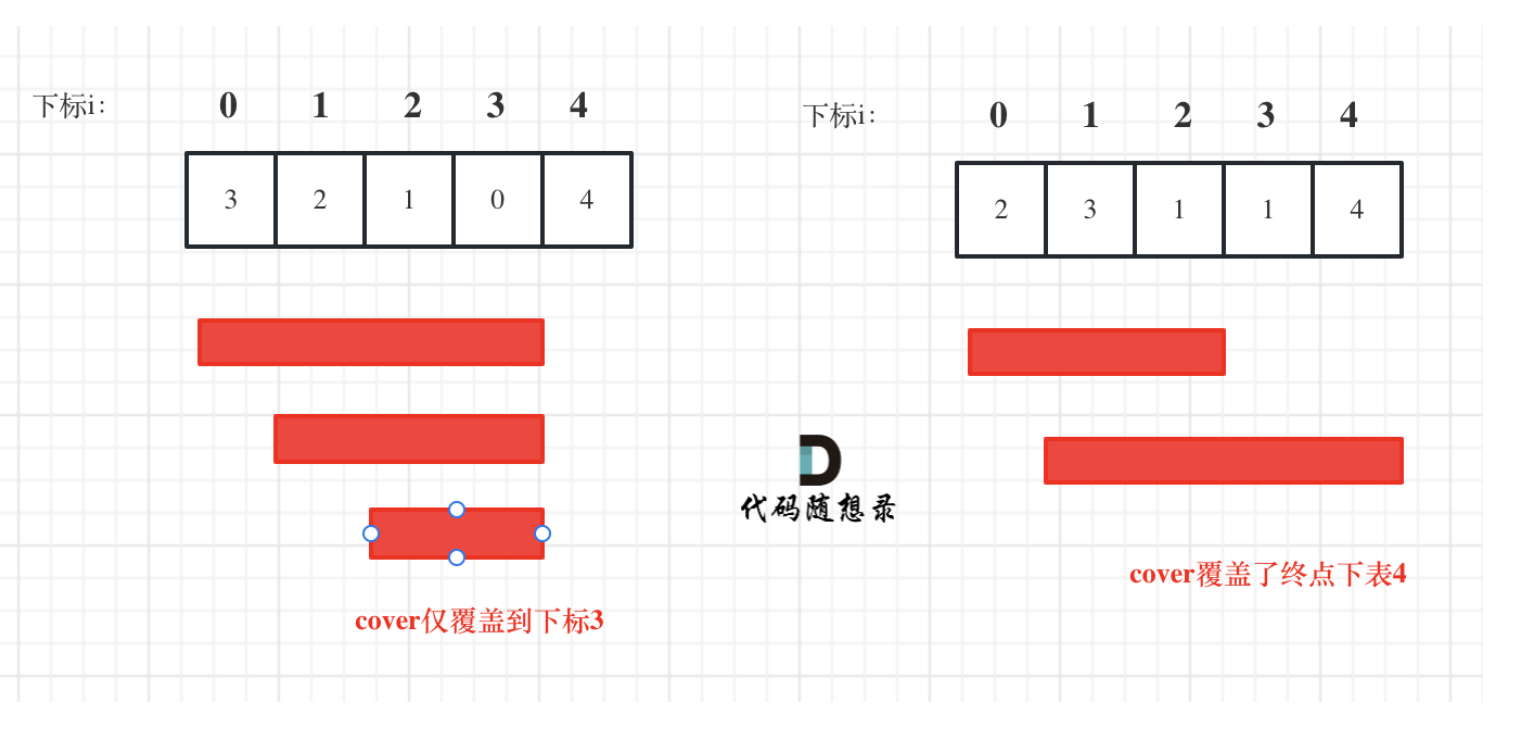
代码随想录算法训练营第48天| 739. 每日温度,496.下一个更大元素 I,503.下一个更大元素II
第十一章:图论part01 图论理论基础 大家可以在看图论理论基础的时候,很多内容 看不懂,例如也不知道 看完之后 还是不知道 邻接矩阵,邻接表怎么用, 别着急。 理论基础大家先对各个概念有个印象就好,后面在…...

Qt 支持打包成安卓
1. 打开维护Qt,双击MaintenanceTool.exe 2.登陆进去,默认是添加或移除组件,点击下一步, 勾选Android, 点击下一步 3.更新安装中 4.进度100%,完成安装,重启。 5.打开 Qt Creator,编辑-》Preferences... 6.进…...

PDF工具类源码
PDF-Guru: PDF Guru Anki是一款以PDF为中心的多功能办公学习工具箱软件,包含四大板块功能:PDF实用工具箱、Anki制卡神器、Anki最强辅助、视频笔记神器,软件功能众多且强大,熟练运用可以大幅提高办公和学习效率,绝对是您…...

NirCmd-Gui-Chinese-Introduction
简介 此程序是我的一个练习作品,单纯是为了提升编程水平,次要是为了做一个NirCmd的Gui,其实主要成分还是Gui,核心代码就两三行。 主要是Gui,功能基于nircmd.exe实现,程序本身不提供一些重要的功能。 关于…...

吴恩达深度学习笔记(7)
误差分析: 你运行一个算法代替人类计算,但是没有达到人类的效果,需要手动检查算法中的错误,对模型的一些部分做相应调整,才能更好地提升分类的精度。如果不加分析去做,可能几个月的努力对于提升精度并没有…...
二、数据离线处理场景化解决方案
https://connect.huaweicloud.com/courses/learn/Learning/sp:cloudEdu_?courseNocourse-v1:HuaweiXCBUCNXE147Self-paced&courseType1 1.离线处理方案 **业务场景-安平领域** 业务场景-金融领域 离线批处理常用组件 HDFS:分布式文件系统,为各种…...
算法题总结(十四)——贪心算法(上)
贪心算法 什么是贪心 贪心的本质是选择每一阶段的局部最优,从而达到全局最优。 贪心的套路(什么时候用贪心) 刷题或者面试的时候,手动模拟一下感觉可以局部最优推出整体最优,而且想不到反例,那么就试一试…...
)
紧急预警:C++27 std::filesystem::copy_options::recursive_nowait 已被证实引发静默截断!附官方补丁+3行兼容封装方案(2025 Q2前必读)
第一章:C27 文件系统库扩展应用C27 标准对 <filesystem> 库进行了实质性增强,新增了异步路径遍历、符号链接元数据深度解析、跨设备硬链接原子创建以及基于策略的路径规范化接口。这些特性显著提升了在复杂存储拓扑(如容器挂载点、分布…...

【Python并发成本控制终极指南】:GIL移除后3大无锁模型选型公式与ROI量化对比表
第一章:Python无锁GIL环境下的并发成本控制全景图Python 的全局解释器锁(GIL)长期被视为多线程 CPU 密集型任务的性能瓶颈。然而,随着 CPython 3.13 引入实验性无锁 GIL(--without-pymalloc 配合 --with-experimental-…...

Java SpringBoot+Vue3+MyBatis 信息化在线教学平台系统源码|前后端分离+MySQL数据库
摘要 随着信息技术的快速发展,教育行业正逐步向数字化、智能化转型。传统的线下教学模式受限于时间和空间,难以满足现代教育的高效性和灵活性需求。在线教学平台通过整合互联网技术与教育资源,为师生提供了便捷的交互渠道,有效提升…...

零代码玩转Qwen3-TTS:WebUI界面操作,轻松克隆声音做配音
零代码玩转Qwen3-TTS:WebUI界面操作,轻松克隆声音做配音 1. 引言:声音克隆技术的新选择 如果你曾经想过为自己的视频配音,或者需要批量生成语音内容,但苦于没有专业录音设备和配音演员,Qwen3-TTS的WebUI界…...

3分钟快速上手:使用res-downloader实现全网资源一键捕获与下载
3分钟快速上手:使用res-downloader实现全网资源一键捕获与下载 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 想…...

小米平板4/4Plus驱动板安装与调试全攻略:从HDMI连接到触摸校准
1. 小米平板4驱动板安装前的准备工作 第一次接触驱动板安装的朋友可能会觉得有点复杂,但其实只要做好准备工作,整个过程就会顺利很多。我去年帮朋友改装过三台小米平板4,总结出几个关键点。首先,你需要确认手头的驱动板型号是否匹…...

5962-88769022A,兼容LSTTL/TTL/CMOS逻辑与6.4mA驱动能力的防抖动逻辑门光耦
简介今天我要向大家介绍的是 Broadcom 的光电耦合器——5962-88769022A。它的每一条通道都由一颗AlGaAs发光二极管和一颗带有迟滞阈值的高增益光子探测器组成。当输入端接收到2mA到8mA的微小电流时,LED便会发光。而接收端的探测器不仅负责捕捉光信号,其内…...

Neeshck-Z-lmage_LYX_v2应用落地:国风插画师本地AI绘画工作流搭建
Neeshck-Z-lmage_LYX_v2应用落地:国风插画师本地AI绘画工作流搭建 想成为一名国风插画师,但苦于绘画技巧需要长期积累?或者,你已经是一位创作者,却常常被灵感枯竭和重复性工作所困扰?今天,我将…...

玩客云OneCloud轻量级影视站:LibreTV+Docker极简部署指南
1. 为什么选择玩客云搭建影视站? 最近两年,我发现身边越来越多的朋友开始折腾家庭影音系统。有人花大价钱买专业NAS,也有人用旧电脑改造,但最让我眼前一亮的方案,还是用玩客云OneCloud这种小设备搭建影视站。你可能要问…...

3个数据完整性保障:payload-dumper-go校验机制实践
3个数据完整性保障:payload-dumper-go校验机制实践 【免费下载链接】payload-dumper-go an android OTA payload dumper written in Go 项目地址: https://gitcode.com/gh_mirrors/pa/payload-dumper-go 在Android系统的OTA更新过程中,数据完整性…...