YOLOv6-4.0部分代码阅读笔记-effidehead_lite.py
effidehead_lite.py
yolov6\models\heads\effidehead_lite.py
目录
effidehead_lite.py
1.所需的库和模块
2.class Detect(nn.Module):
3.def build_effidehead_layer(channels_list, num_anchors, num_classes, num_layers):
1.所需的库和模块
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
from yolov6.layers.common import DPBlock
from yolov6.assigners.anchor_generator import generate_anchors
from yolov6.utils.general import dist2bbox
2.class Detect(nn.Module):
class Detect(nn.Module):# 高效分离头。# 利用硬件感知设计,使用混合通道方法对解耦头进行优化。'''Efficient Decoupled HeadWith hardware-aware degisn, the decoupled head is optimized withhybridchannels methods.'''def __init__(self, num_classes=80, num_layers=3, inplace=True, head_layers=None): # detection layer 检测层super().__init__()assert head_layers is not Noneself.nc = num_classes # number of classes 类别数量self.no = num_classes + 5 # number of outputs per anchor 每个锚点的输出数量self.nl = num_layers # number of detection layers 检测层数self.grid = [torch.zeros(1)] * num_layersself.prior_prob = 1e-2self.inplace = inplacestride = [8, 16, 32] if num_layers == 3 else [8, 16, 32, 64] # strides computed during build 构建期间计算的步长self.stride = torch.tensor(stride)self.grid_cell_offset = 0.5self.grid_cell_size = 5.0# Init decouple head 初始化解耦头self.stems = nn.ModuleList()self.cls_convs = nn.ModuleList()self.reg_convs = nn.ModuleList()self.cls_preds = nn.ModuleList()self.reg_preds = nn.ModuleList()# Efficient decoupled head layers 高效解耦的头部层for i in range(num_layers):idx = i*5self.stems.append(head_layers[idx])self.cls_convs.append(head_layers[idx+1])self.reg_convs.append(head_layers[idx+2])self.cls_preds.append(head_layers[idx+3])self.reg_preds.append(head_layers[idx+4])# 它用于初始化神经网络中特定层的偏置(biases)。这个方法特别针对于类别预测层( self.cls_preds )和边界框回归预测层( self.reg_preds )的偏置和权重进行初始化。# 接受 self 作为参数,表示类的实例。def initialize_biases(self):# 遍历所有类别预测层, self.cls_preds 是一个包含卷积层的列表。for conv in self.cls_preds:# 获取当前卷积层的偏置,并将其展平为一维张量。b = conv.bias.view(-1, )# 使用逻辑斯谛分布的公式来初始化偏置值。这里的 self.prior_prob 是一个先验概率,通常用于目标检测中表示目标存在的概率。这个公式确保了在开始训练时,模型对目标的存在与否持中立态度。b.data.fill_(-math.log((1 - self.prior_prob) / self.prior_prob))# 将初始化后的偏置值重新设置为卷积层的偏置,并确保它们是可训练的( requires_grad=True )。conv.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)# 获取当前卷积层的权重。w = conv.weight# 将权重初始化为0。w.data.fill_(0.)# 将权重重新设置为卷积层的权重,并确保它们是可训练的。conv.weight = torch.nn.Parameter(w, requires_grad=True)# 遍历所有边界框回归预测层, self.reg_preds 是一个包含卷积层的列表。for conv in self.reg_preds:# 获取当前卷积层的偏置,并将其展平为一维张量。b = conv.bias.view(-1, )# 将偏置值初始化为1.0,这是因为在边界框回归中,我们通常希望预测的边界框与真实边界框的中心点对齐。b.data.fill_(1.0)# 将初始化后的偏置值重新设置为卷积层的偏置,并确保它们是可训练的。conv.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)# 获取当前卷积层的权重。w = conv.weight# 将权重初始化为0。w.data.fill_(0.)# 将权重重新设置为卷积层的权重,并确保它们是可训练的。conv.weight = torch.nn.Parameter(w, requires_grad=True)def forward(self, x):if self.training:cls_score_list = []reg_distri_list = []for i in range(self.nl):x[i] = self.stems[i](x[i])cls_x = x[i]reg_x = x[i]cls_feat = self.cls_convs[i](cls_x)cls_output = self.cls_preds[i](cls_feat)reg_feat = self.reg_convs[i](reg_x)reg_output = self.reg_preds[i](reg_feat)cls_output = torch.sigmoid(cls_output)cls_score_list.append(cls_output.flatten(2).permute((0, 2, 1)))reg_distri_list.append(reg_output.flatten(2).permute((0, 2, 1)))cls_score_list = torch.cat(cls_score_list, axis=1)reg_distri_list = torch.cat(reg_distri_list, axis=1)return x, cls_score_list, reg_distri_listelse:cls_score_list = []reg_dist_list = []# def generate_anchors(feats, fpn_strides, grid_cell_size=5.0, grid_cell_offset=0.5, device='cpu', is_eval=False, mode='af'):# -> 根据特征生成锚点。# -> return anchor_points, stride_tensor / return anchors, anchor_points, num_anchors_list, stride_tensoranchor_points, stride_tensor = generate_anchors(x, self.stride, self.grid_cell_size, self.grid_cell_offset, device=x[0].device, is_eval=True, mode='af')for i in range(self.nl):b, _, h, w = x[i].shapel = h * wx[i] = self.stems[i](x[i])cls_x = x[i]reg_x = x[i]cls_feat = self.cls_convs[i](cls_x)cls_output = self.cls_preds[i](cls_feat)reg_feat = self.reg_convs[i](reg_x)reg_output = self.reg_preds[i](reg_feat)cls_output = torch.sigmoid(cls_output)cls_score_list.append(cls_output.reshape([b, self.nc, l]))reg_dist_list.append(reg_output.reshape([b, 4, l]))cls_score_list = torch.cat(cls_score_list, axis=-1).permute(0, 2, 1)reg_dist_list = torch.cat(reg_dist_list, axis=-1).permute(0, 2, 1)# def dist2bbox(distance, anchor_points, box_format='xyxy'): -> 将距离(ltrb)转换为盒子(xywh或xyxy)。 -> return bboxpred_bboxes = dist2bbox(reg_dist_list, anchor_points, box_format='xywh')pred_bboxes *= stride_tensorreturn torch.cat([pred_bboxes,torch.ones((b, pred_bboxes.shape[1], 1), device=pred_bboxes.device, dtype=pred_bboxes.dtype),cls_score_list],axis=-1)3.def build_effidehead_layer(channels_list, num_anchors, num_classes, num_layers):
def build_effidehead_layer(channels_list, num_anchors, num_classes, num_layers):head_layers = nn.Sequential(# stem0DPBlock(in_channel=channels_list[0],out_channel=channels_list[0],kernel_size=5,stride=1),# cls_conv0DPBlock(in_channel=channels_list[0],out_channel=channels_list[0],kernel_size=5,stride=1),# reg_conv0DPBlock(in_channel=channels_list[0],out_channel=channels_list[0],kernel_size=5,stride=1),# cls_pred0nn.Conv2d(in_channels=channels_list[0],out_channels=num_classes * num_anchors,kernel_size=1),# reg_pred0nn.Conv2d(in_channels=channels_list[0],out_channels=4 * num_anchors,kernel_size=1),# stem1DPBlock(in_channel=channels_list[1],out_channel=channels_list[1],kernel_size=5,stride=1),# cls_conv1DPBlock(in_channel=channels_list[1],out_channel=channels_list[1],kernel_size=5,stride=1),# reg_conv1DPBlock(in_channel=channels_list[1],out_channel=channels_list[1],kernel_size=5,stride=1),# cls_pred1nn.Conv2d(in_channels=channels_list[1],out_channels=num_classes * num_anchors,kernel_size=1),# reg_pred1nn.Conv2d(in_channels=channels_list[1],out_channels=4 * num_anchors,kernel_size=1),# stem2DPBlock(in_channel=channels_list[2],out_channel=channels_list[2],kernel_size=5,stride=1),# cls_conv2DPBlock(in_channel=channels_list[2],out_channel=channels_list[2],kernel_size=5,stride=1),# reg_conv2DPBlock(in_channel=channels_list[2],out_channel=channels_list[2],kernel_size=5,stride=1),# cls_pred2nn.Conv2d(in_channels=channels_list[2],out_channels=num_classes * num_anchors,kernel_size=1),# reg_pred2nn.Conv2d(in_channels=channels_list[2],out_channels=4 * num_anchors,kernel_size=1))if num_layers == 4:head_layers.add_module('stem3',# stem3DPBlock(in_channel=channels_list[3],out_channel=channels_list[3],kernel_size=5,stride=1))head_layers.add_module('cls_conv3',# cls_conv3DPBlock(in_channel=channels_list[3],out_channel=channels_list[3],kernel_size=5,stride=1))head_layers.add_module('reg_conv3',# reg_conv3DPBlock(in_channel=channels_list[3],out_channel=channels_list[3],kernel_size=5,stride=1))head_layers.add_module('cls_pred3',# cls_pred3nn.Conv2d(in_channels=channels_list[3],out_channels=num_classes * num_anchors,kernel_size=1))head_layers.add_module('reg_pred3',# reg_pred3nn.Conv2d(in_channels=channels_list[3],out_channels=4 * num_anchors,kernel_size=1))return head_layers相关文章:

YOLOv6-4.0部分代码阅读笔记-effidehead_lite.py
effidehead_lite.py yolov6\models\heads\effidehead_lite.py 目录 effidehead_lite.py 1.所需的库和模块 2.class Detect(nn.Module): 3.def build_effidehead_layer(channels_list, num_anchors, num_classes, num_layers): 1.所需的库和模块 import torch import t…...
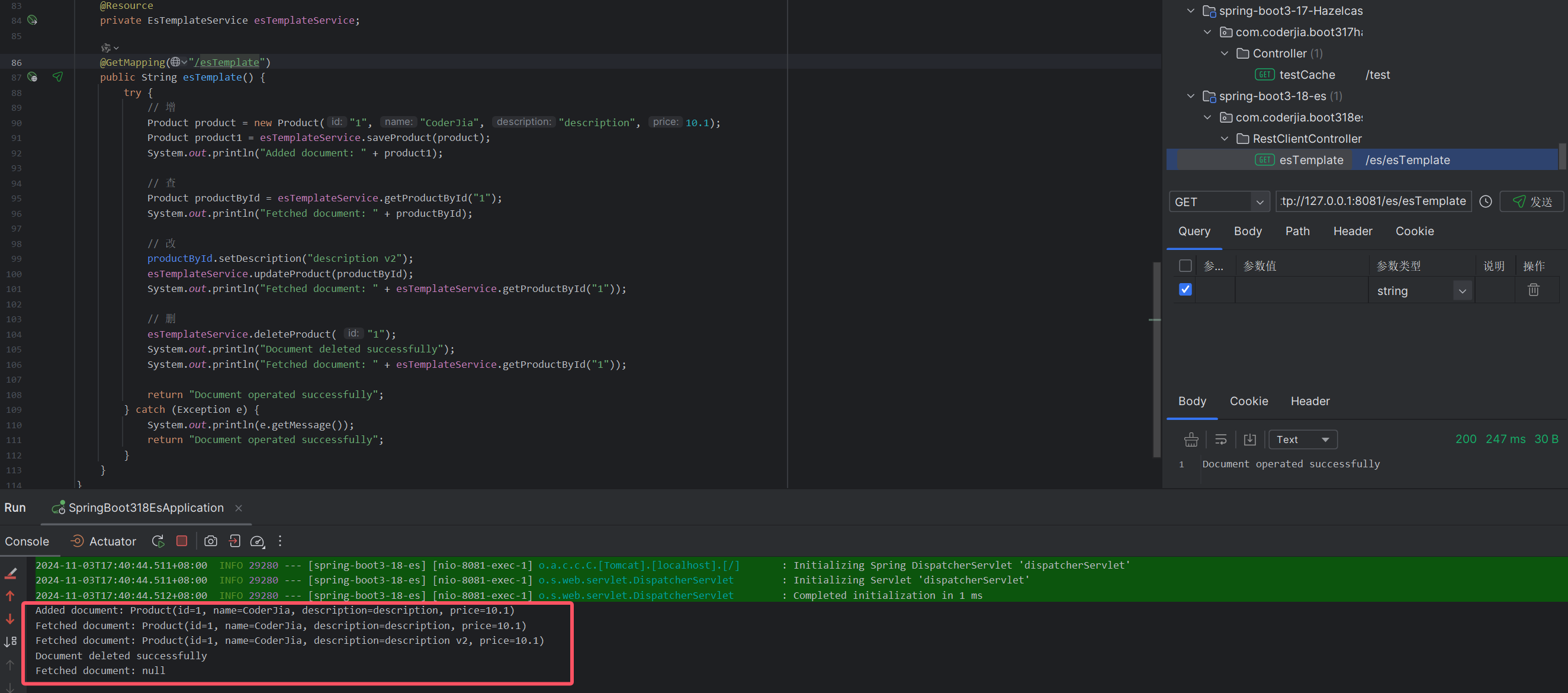
重学SpringBoot3-整合 Elasticsearch 8.x (一)客户端方式
更多SpringBoot3内容请关注我的专栏:《SpringBoot3》 期待您的点赞👍收藏⭐评论✍ 这里写目录标题 1. 为什么选择 Elasticsearch?2. Spring Boot 3 和 Elasticsearch 8.x 的集成概述2.1 准备工作2.2 添加依赖 3. Elasticsearch 客户端配置方式…...

极简实现酷炫动效:Flutter隐式动画指南第三篇自定义Flutter隐式动画
目录 前言 一、TweenAnimationBuilder 二、使用TweenAnimationBuilder实现的一些动画效果 1.调整透明度的动画 2.稍微复杂点的组合动画 3.数字跳动的动画效果 前言 上两节博客分别介绍了Flutter中的隐式动画的基础知识以及使用隐式动画实现的一些动画效果。当系统提供的隐…...

无人机维护保养、部件修理更换技术详解
无人机作为一种精密的航空设备,其维护保养和部件修理更换是确保飞行安全、延长使用寿命的重要环节。以下是对无人机维护保养、部件修理更换技术的详细解析: 一、无人机维护保养技术 1. 基础构造理解: 熟悉无人机的基本构造,包括…...

xilinx vitis 更换硬件平台——ZYNQ学习笔记5
1、重新生成硬件信息 2、选择带有bit信息 3、设施路径和名字 4、打开更新硬件选项 5、选择新的硬件信息 6、打开系统工程界面 7、复位硬件信息 更新完毕...
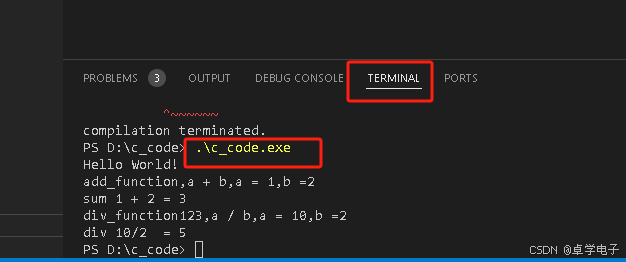
vscode makfile编译c程序
编译工具安装 为了在 Windows 上安装 GCC,您需要安装 MinGW-w64。 MinGW-w64 是一个开源项目,它为 Windows 系统提供了一个完整的 GCC 工具链,支持编译生成 32 位和 64 位的 Windows 应用程序。 1. 下载MinGW-w64源代码,如图点…...

【学术论文投稿】探索嵌入式硬件设计:揭秘智能设备的心脏
【IEEE出版】第六届国际科技创新学术交流大会暨通信、信息系统与软件工程学术会议(CISSE 2024)_艾思科蓝_学术一站式服务平台 更多学术会议论文投稿请看:https://ais.cn/u/nuyAF3 目录 引言 嵌入式系统简介 嵌入式硬件设计的组成部分 设…...

JavaScript 概述
### JavaScript 概述 JavaScript 是一种广泛使用的编程语言,它最初由 Netscape 公司的 Brendan Eich 在1995年创建,目的是为网页添加交互性。随着时间的发展,JavaScript 已经从一个简单的脚本语言演变成了一种功能强大的编程语言,…...

2024年10月个人工作生活总结
本文为 2024年10月工作生活总结。 研发编码 一个证书过期问题记录 某天,现场反馈某服务无法使用问题,经同事排查,是因为服务证书过期导致的。原来,证书的有效期设置为5年,这个月刚好到期。 虽然这个问题与自己无直接…...

uniapp ,微信小程序,滚动(下滑,上拉)到底部加载下一页内容
前言 小程序的内容基本都是滑动到底部加载下一页,这个一般都没有什么好用的组件来用,我看vant和uniapp的插件里最多只有个分页,没有滚动到底部加载下一页。再次做个记录。 效果预览 下滑到底部若是有下一页,则会自动加载下一页&…...

MySQL中的日志类型有哪些?binlog、redolog和undolog的作用和区别是什么?
简介: MySQL中有六种日志文件,分别是:重做日志(redo log)、回滚日志(undo log)、二进制日志(binlog)、错误日志(errorlog)、慢查询日志࿰…...

【uni-app】创建自定义模板
1. 步骤 打开自定义模板文件夹 在此文件夹下创建模板文件(注意后缀名) 重新点击“新建页面” 即可看到新建的模板 2. 注意事项 创建的模板必须文件类型对应(vue模板就创建*.vue文件, uvue模板就创建*.uvue文件)...

Cesium移动Primitive位置
与传统的Entity实体不同,Primitive作为一种自定义基本图元,几何形状、材质和其他属性均由使用者定义,在需要绘制大量静态几何图形的高效渲染场景中更为适用。 Primitive的移动涉及到矩阵变换,并不像Entity那样给它替换一个新的坐…...

安卓13默认连接wifi热点 android13默认连接wifi
总纲 android13 rom 开发总纲说明 文章目录 1.前言2.问题分析3.代码分析4.代码修改5.编译6.彩蛋1.前言 有时候我们需要让固件里面内置好,相关的wifi的ssid和密码,让固件起来就可以连接wifi,不用在手动操作。 2.问题分析 这个功能,使用普通的安卓代码就可以实现了。 3.代…...

parted 磁盘分区
目录 磁盘格式磁盘分区文件系统挂载使用扩展 - parted、fdisk、gdisk 区别 磁盘格式 parted /dev/vdcmklabel gpt # 设置磁盘格式为GPT p # 打印磁盘信息此时磁盘格式设置完成! 磁盘分区 开始分区: mkpart data_mysql # 分区名&…...

第三百零八节 Log4j教程 - Log4j日志到数据库
Log4j教程 - Log4j日志到数据库 我们可以使用log4j API通过使用org.apache.log4j.jdbc.JDBCAppender对象将信息记录到数据库中。 下表列出了JDBCAppender的配置属性。 属性描述bufferSize设置缓冲区大小。默认大小为1。driverJDBC驱动程序类。默认为sun.jdbc.odbc.JdbcOdbcDr…...

ai智能语音电销机器人可以做哪些事情?
AI智能语音电销机器人是结合人工智能技术进行自动化电话销售和客户互动的工具,能够完成一系列任务,有助于提升销售效果、优化客户体验和提高工作效率。以下是AI智能语音电销机器人可以做的一些主要事情: 1. 自动拨号 AI语音电销机器人可以自…...

CleanShot X - Mac(苹果电脑)专业截图录屏软件
CleanShot X 不仅提供了基础的截图功能,更内置了强大的图片编辑器,让你能轻松添加标注、形状、文本……以及将多个截图进行合并。 无论是为社交媒体制作图文,还是制作专业的产品 / 教程演示,CleanShot X 都能满足你的需求。 软件…...

Kafka 客户端工具使用分享【offsetexplorer】
前言: 前面我们使用 Spring Boot 继承 Kafka 完成了消息发送,有朋友会问 Kafka 有没有好用的客户端工具,RabbitMQ、RocketMQ 都有自己的管理端,那 Kafka 如何去查看发送出去的消息呢? 本篇我们就来分享一个好用的工具…...

uni-app 下拉刷新、 上拉触底(列表信息)、 上滑加载(短视频) 一键搞定
一、下拉刷新 1. 首先找到pages.json中 给需要进行下拉刷新的页面设置可以下拉刷新 2. 然后在需要实现下拉刷新的script标签内添加 导入onPullDownRefresh import {onPullDownRefresh} from dcloudio/uni-app 下拉刷新触发的事件 onPullDownRefresh(()> {console.log(正…...
技术解析与应用前景)
量子私有信息检索(QPIR)技术解析与应用前景
1. 量子私有信息检索技术概述量子私有信息检索(Quantum Private Information Retrieval, QPIR)是密码学领域的一项突破性技术,它允许用户从数据库中检索特定条目而不泄露被查询的是哪个条目。这项技术的核心价值在于解决了隐私保护与数据获取…...
:含12组经大英博物馆湿版藏品验证的Reference Prompt库)
Midjourney湿版摄影风格实战手册(从胶片化学原理到Prompt工程):含12组经大英博物馆湿版藏品验证的Reference Prompt库
更多请点击: https://intelliparadigm.com 第一章:湿版摄影的历史溯源与Midjourney风格化转译本质 湿版摄影(Wet Plate Collodion Process)诞生于1851年,由弗雷德里克斯科特阿彻(Frederick Scott Archer&a…...

CircuitPython开发进阶:从库文档解读到内存优化与异步编程实战
1. 从“能用”到“精通”:为什么你需要深入理解CircuitPython库文档刚接触CircuitPython时,我们往往是从复制粘贴示例代码开始的。这没什么问题,快速让一个LED闪烁起来,或者让传感器读出数据,那种即时反馈的成就感是驱…...

量子控制中的动态校正门与SCQC几何方法
1. 量子控制中的噪声挑战与动态校正门在超导量子处理器上实现高保真度的量子门操作,最大的障碍来自环境噪声。这些噪声主要分为两类:失谐噪声(δz)和幅度噪声(ϵ)。失谐噪声源于量子比特频率的漂移…...

基于BLE信号强度的寻物游戏:用CircuitPython实现无线接近探测
1. 项目概述:一个用蓝牙信号“捉迷藏”的硬件游戏几年前我第一次接触Adafruit的Circuit Playground系列开发板时,就被它那种“开箱即玩”的理念吸引了。它把LED、按钮、传感器都集成在一块板子上,让你不用焊接就能快速验证想法。后来出的Circ…...

视觉显著目标的自适应分割与动态网格生成算法研究
ArticleObjectiveMethodComments视觉显著目标的自适应分割背景是基于视觉注意模型和最大熵分割算法,针对复杂背景下的显著目标分割问题。目的是提出一种自适应显著目标分割方法,以便快速准确地从场景图像中检测出显著目标。试验用的方法是通过颜色、强度…...

ncmdump终极指南:如何快速免费解锁网易云音乐NCM格式
ncmdump终极指南:如何快速免费解锁网易云音乐NCM格式 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的加密文件无法在其他设备播放而烦恼吗?ncmdump正是你需要的解决方案!这…...

FMCW雷达干扰抑制:分数傅里叶变换的工程实践
1. FMCW雷达干扰问题与分数傅里叶变换的机遇在79GHz频段工作的车载FMCW雷达,其线性调频连续波(LFM)信号极易受到同频段其他雷达设备的干扰。这种干扰会导致雷达检测性能显著下降——实测数据显示,强干扰环境下目标检测的虚警率可能…...

Spring Kafka监听多个Topic时,如何避免消费者‘摸鱼’?聊聊Range和RoundRobin分配策略的选择
Spring Kafka多Topic监听场景下消费者分配策略深度优化 1. 问题背景:当消费者开始"摸鱼" 在分布式消息系统中,Kafka凭借其高吞吐、低延迟的特性成为众多企业的首选。然而在实际开发中,不少团队遇到过这样的尴尬场景:明明…...
)
用STM32F103C8T6和HC-05蓝牙模块,从零DIY一辆蓝牙遥控小车(附完整代码与MIT App Inventor教程)
从零打造STM32蓝牙遥控小车:硬件配置到APP开发全指南 项目背景与核心价值 对于嵌入式开发初学者来说,理论知识和实际项目之间往往存在一道难以跨越的鸿沟。而一个完整的硬件项目实践,恰恰是填补这一空白的最佳方式。基于STM32F103C8T6和HC-05…...