呼叫中心报工号功能有没有价值?有没有更好的方案?
呼叫中心报工号功能有没有价值?有没有更好的方案?
作者:开源呼叫中心系统 FreeIPCC,Github地址:https://github.com/lihaiya/freeipcc
呼叫中心报工号功能确实具有一定的价值,主要体现在以下几个方面:
- 提升企业形象:报工号功能体现了企业管理规范有序的形象,是提升企业形象的最佳选择。客户在听到工号播报后,能够感受到企业的专业性和正规性,从而增加对企业的信任度。
- 便于客户识别:播报工号后,客户能够清楚地知道自己正在与哪位客服人员进行沟通,便于在后续沟通中识别对方,减少沟通障碍。
- 便于企业监管:工号播报功能也有助于企业监管客服人员的工作表现。通过录音和工号信息,企业可以追溯客服人员的服务过程,评估其服务质量,并进行相应的奖惩措施。
然而,对于报工号功能是否存在更好的方案,这取决于企业的具体需求和呼叫中心的实际运营情况。以下是一些可能的改进方案:
-
优化播报方式:
- 可以采用用户和话务员同时听到自动播报工号的方式,也可以采用用户能听见但话务员听不见的优化方式,以减少话务员的噪声压力。
- 播报内容可以更加简洁明了,只包含必要的工号信息,避免冗长的播报内容影响客户体验。
-
结合智能技术:
- 引入智能语音识别技术,使客户可以通过语音指令直接选择服务或查询信息,减少人工干预,提高服务效率。
- 利用智能质检系统对通话进行实时监测和评估,确保客服人员的服务质量符合企业标准。
-
提供多渠道服务:
- 除了电话服务外,还可以提供在线聊天、电子邮件、社交媒体等多种服务渠道,以满足不同客户的需求和偏好。
- 通过多渠道整合,实现客户信息的共享和统一管理,提高服务的一致性和效率。
-
个性化服务体验:
- 根据客户的历史记录和偏好,提供个性化的服务和推荐。
- 利用数据分析技术,挖掘客户的潜在需求和行为模式,为企业制定更精准的营销策略提供数据支持。
综上所述,呼叫中心报工号功能具有一定的价值,但企业可以根据自身需求和实际情况进行改进和优化。通过引入智能技术、提供多渠道服务以及个性化服务体验等措施,可以进一步提升呼叫中心的服务质量和客户满意度。
相关文章:

呼叫中心报工号功能有没有价值?有没有更好的方案?
呼叫中心报工号功能有没有价值?有没有更好的方案? 作者:开源呼叫中心系统 FreeIPCC,Github地址:https://github.com/lihaiya/freeipcc 呼叫中心报工号功能确实具有一定的价值,主要体现在以下几个方面&…...

Unity 6 基础教程(Unity 界面)
Unity 6 基础教程(Unity 界面) Unity 6 基础教程(Unity 界面)Project 窗口Project 窗口工具栏Project 窗口 创建菜单Project 窗口 搜索栏Project 窗口 Search 工具Project 窗口 类型搜索Project 窗口 标签搜索Project 窗口 保存搜…...

Vue插槽的使用场景
插槽(slot)是一种用于组件模版复用的技术,它允许你在子组件中预留一些位置,然后在父组件中填充内容。这样就可以在不同的地方使用同一个组件,但是在不同的地方显示不同的内容。 插槽主要分为默认插槽、具名插槽、动态插槽、插槽后备、作用域插…...

Redis 下载安装(Windows11)
目录 Redis工具下载安装 Redis 工具 系统:Windows 11 下载 Windows版本安装包:通过百度网盘分享的文件:Redis-x64-3.0.504.msi 链接:https://pan.baidu.com/s/1qxq0AZJe5bXeCPzm1-RBCg?pwdc14j 提取码:c14j 安装…...

求平面连接线段组成的所有最小闭合区间
这个功能确实非常实用,我在过去开发地面分区编辑器时就曾应用过这一算法。最近,在新产品的开发中再次遇到了类似的需求。尽管之前已经实现过,但由于长时间未接触,对算法的具体细节有所遗忘,导致重新编写时耗费了不少时…...

编译安装并刷写高通智能机器人SDK
The Qualcomm Intelligent Robotics Product SDK (QIRP SDK) 高通智能机器SDK基于ROS2进行开发,此SDK适用于高通linux发行版本,QIRPSDK中提供以下内容: ROS 包中用于支持机器人应用程序开发的参考代码 用于评估机器人平台的端到端场景示例集…...

软考:案例题分析1101
22年第一题:架构设计与评估 分析文字,识别需求和质量属性?这里需要记忆质量属性有那些,区分需求和质量属性,能区分出质量属性之间的区别。 我的回答: 差距分析: 根据题目中功能的特点ÿ…...
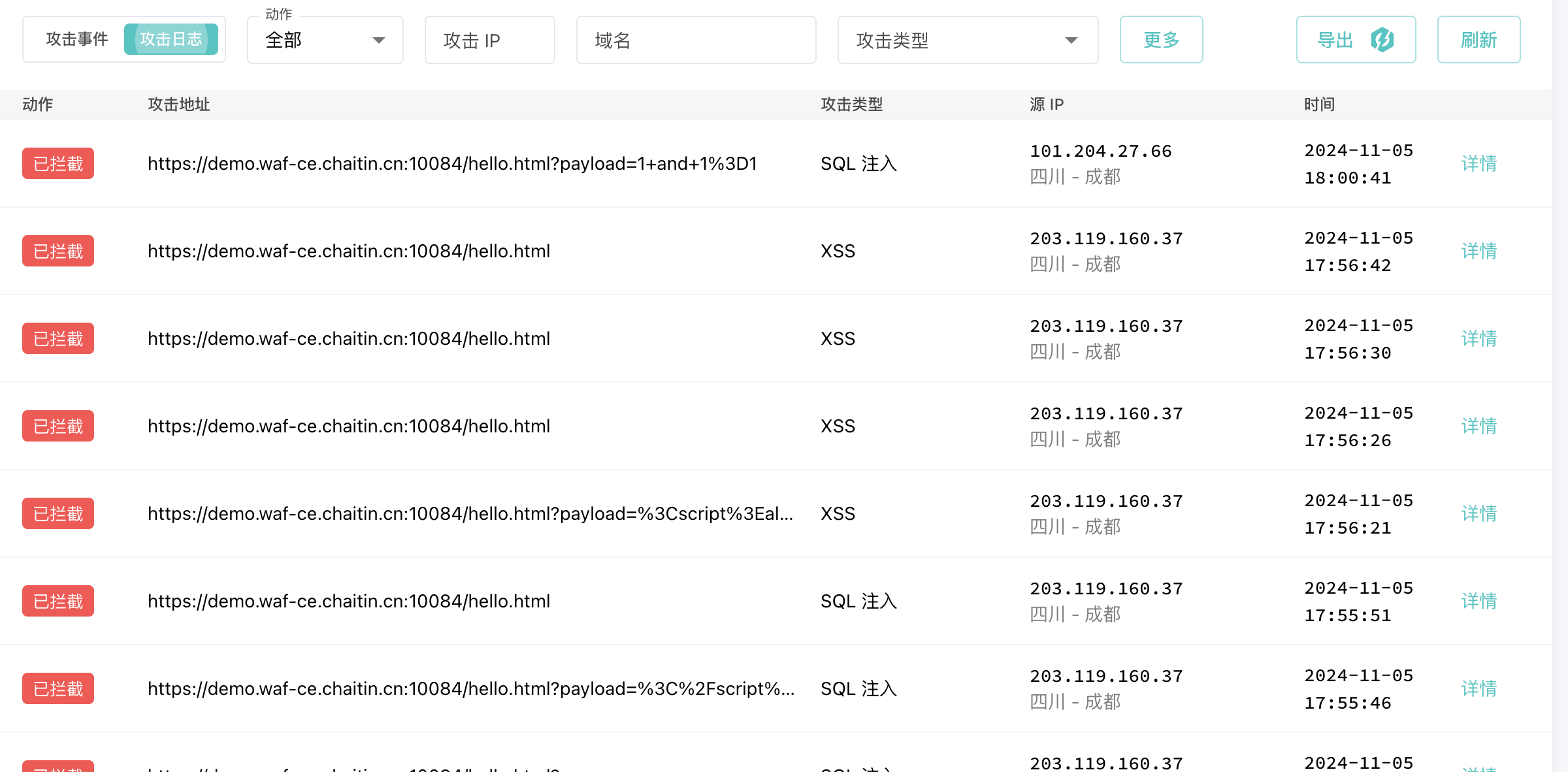
如何检查雷池社区版 WAF 是否安装成功?
容器运行状态检查: 使用命令行检查:打开终端,连接到安装雷池的服务器。运行 docker ps 命令,查看是否有与雷池相关的容器正在运行。 如果能看到类似 safeline-mgt、safeline-tengine 等相关容器,并且状态为 Up&#x…...
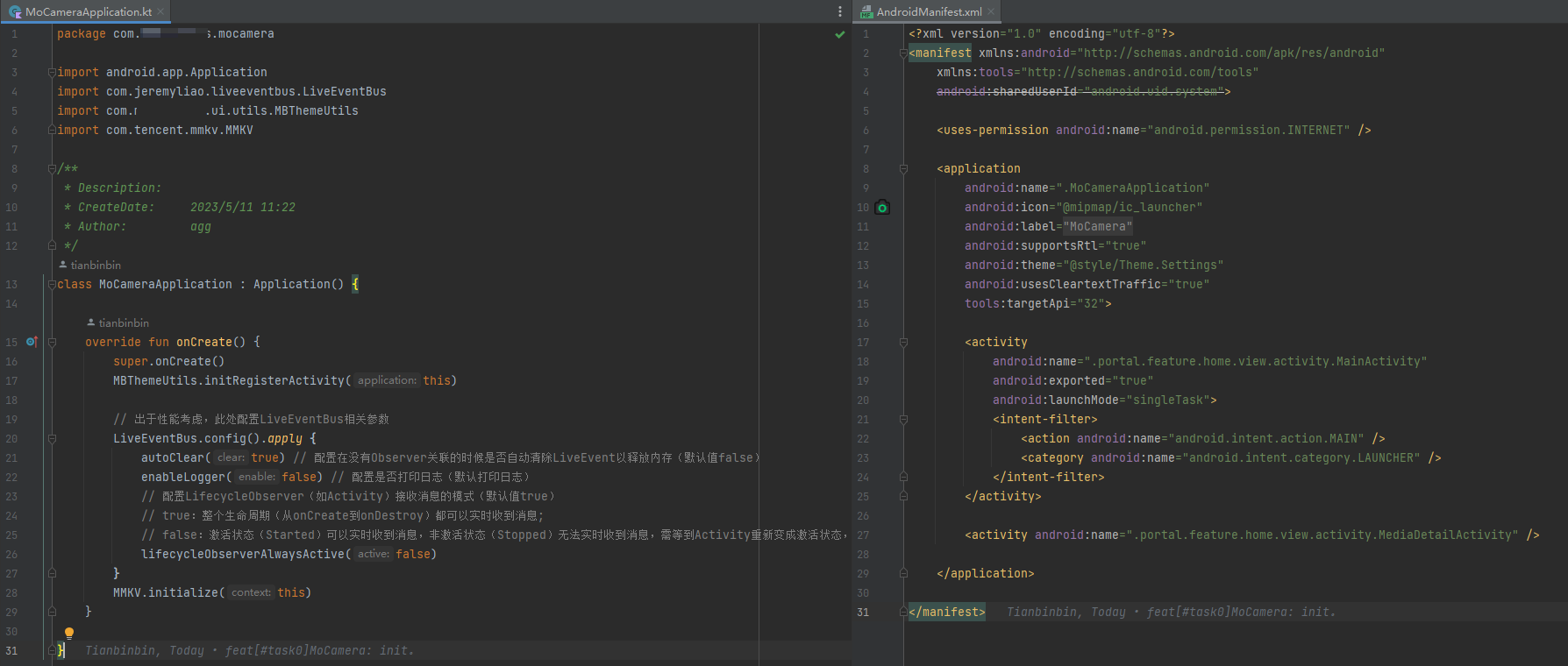
一周内从0到1开发一款 AR眼镜 相机应用?
目录 1. 📂 前言 2. 💠 任务拆分 2.1 产品需求拆分 2.2 开发工作拆分 3. 🔱 开发实现 3.1 代码目录截图 3.2 app 模块 3.3 middleware 模块 3.4 portal 模块 4. ⚛️ 拍照与录像 4.1 前滑后滑统一处理 4.2 初始化 View 以及 Came…...

vue3中setup的作用是什么?
Vue 3.0中的setup函数是一个全新的选项,它是在组件创建时执行的一个函数,用于替代Vue2.x中的beforeCreate和created钩子函数。setup函数的作用是将组件的状态和行为进行分离,使得组件更加清晰和易于维护。 在本文中,我们将详细讲解…...
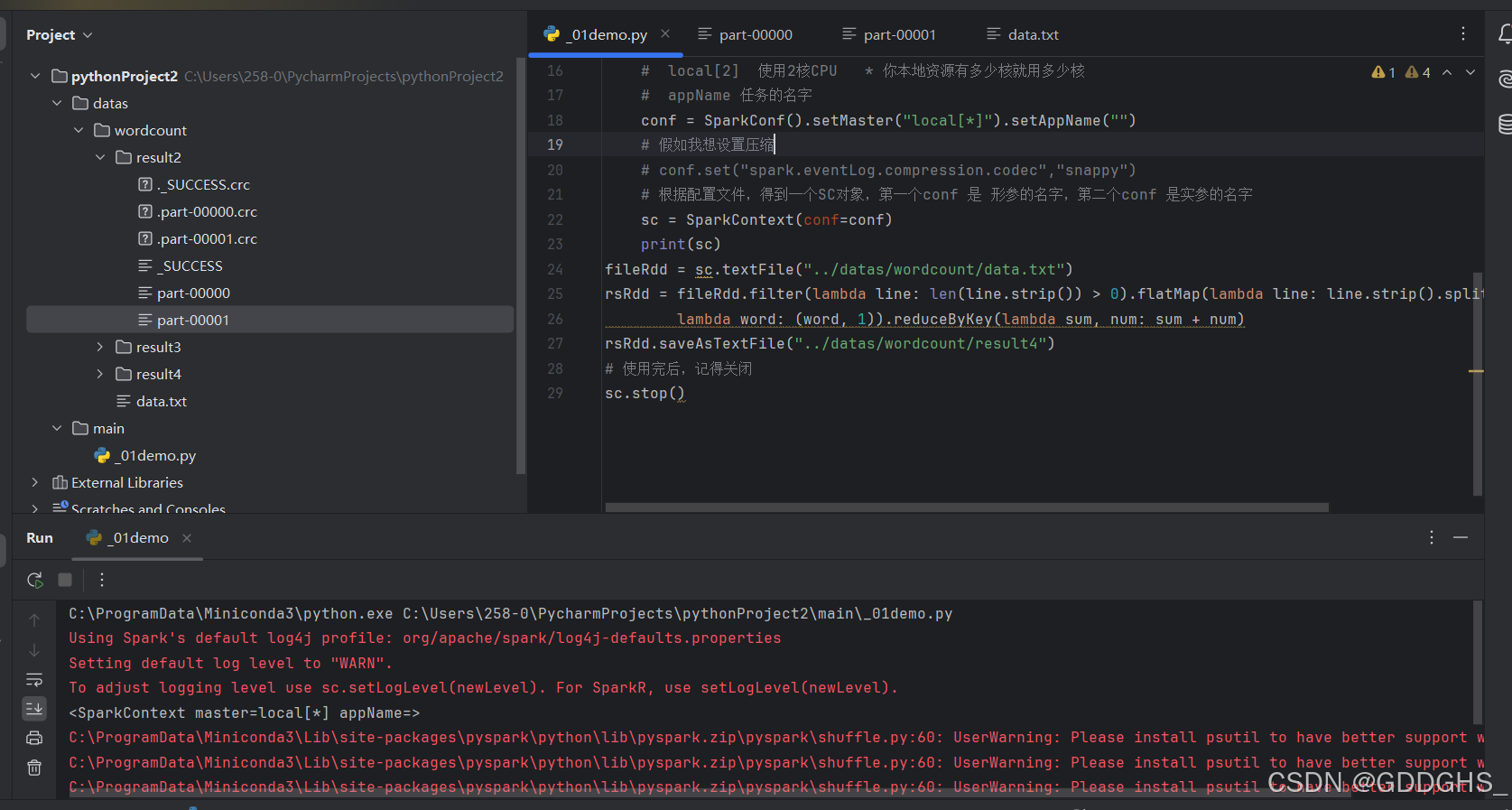
java.io.FileNotFoundException: Could not locate Hadoop executable: (详细解决方案)
1,当你在pycharm 上运行spark代码时候出现下面这个报错。 解决方案 我们要先去hadoop的bin目录下去看看里面是否有 winutils.exe 这个错误 就是缺少winutils.exe 所以报这个错误,把它放到你的hadoop的bin目录下问题就解决了...
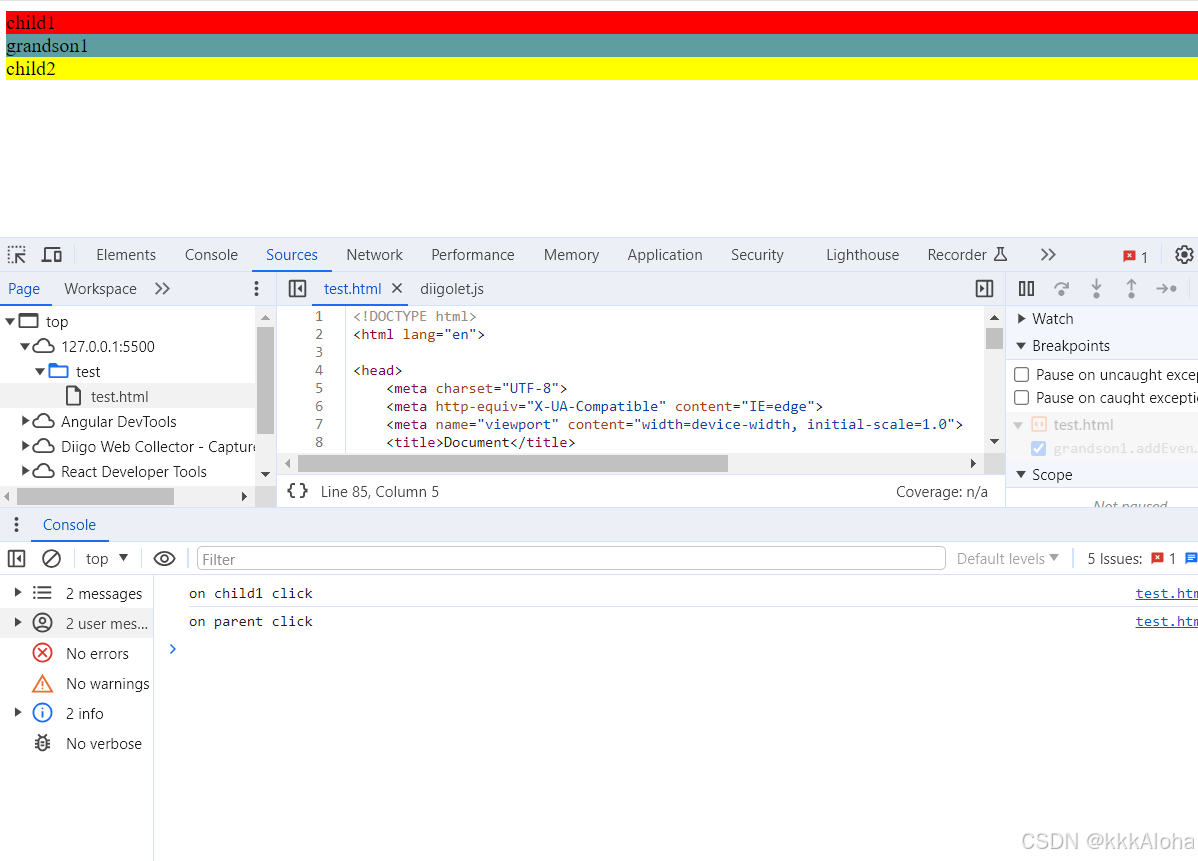
事件捕获vs 事件冒泡,延申事件委托
事件捕获vs事件冒泡 拿点击事件举例子,点击dom树的某个目标节点: 事件捕获:从根节点到目标节点扩散事件冒泡:从目标节点到根节点扩散 扩散就是说,途中的节点,相应的点击事件都会被触发 但是,只…...
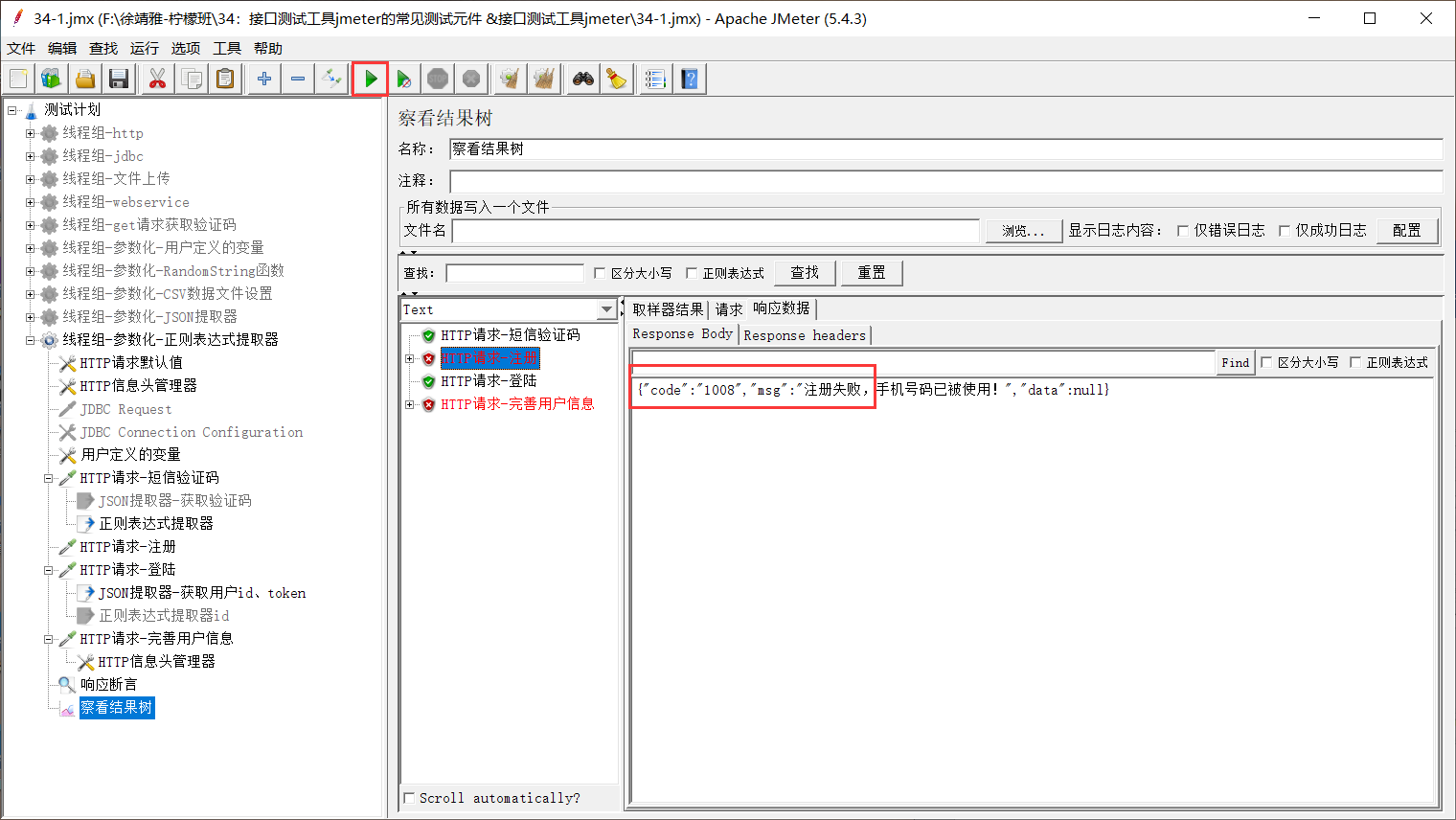
接口测试(十一)jmeter——断言
一、jmeter断言 添加【响应断言】 添加断言 运行后,在【察看结果树】中可得到,响应结果与断言不一致,就会红色标记...

使用buildx构建多架构平台镜像
1. 查看buildx插件信息 比较新的docker-ce版本默认已经集成了buildx插件 [rootdocker ~]# docker buildx version github.com/docker/buildx v0.11.2 9872040 [rootdocker ~]#2. 增加多平台镜像构建支持 通过tonistiigi/binfmt:latest初始化一个基于容器的构建环境ÿ…...
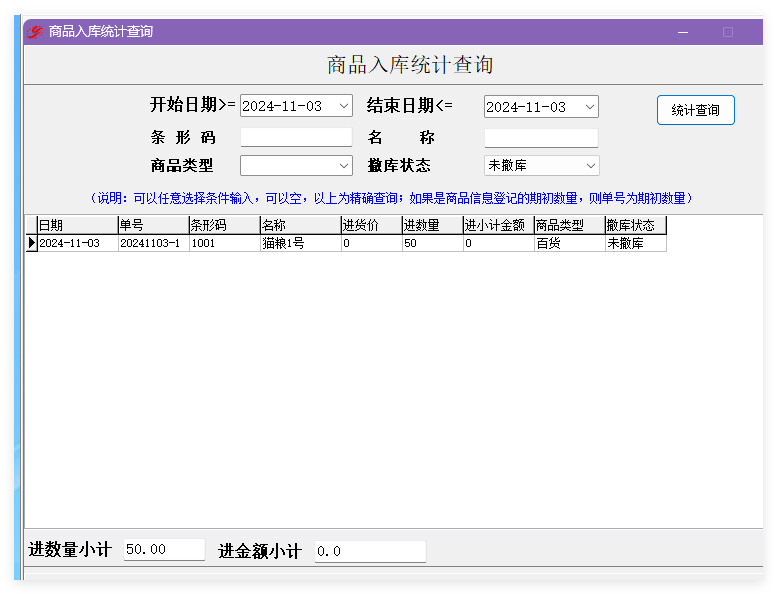
宠物领养救助管理软件有哪些功能 佳易王宠物领养救助管理系统使用操作教程
一、概述 佳易王宠物领养救助管理系统V16.0,集宠物信息登记、查询,宠物领养登记、查询, 宠物领养预约管理、货品进出库库存管理于一体的综合管理系统软件。 概述: 佳易王宠物领养救助管理系统V16.0,集宠物信息登记…...

Spring Boot中实现多数据源连接和切换的方案
Spring Boot中实现多数据源连接和切换的方案 在Spring Boot项目中,随着业务需求的增长,我们往往需要连接多个数据库,即实现多数据源连接和切换。这种需求可能源于数据库的读写分离、微服务架构下的服务拆分、数据分库分表等场景。本文将详细…...

科技资讯|谷歌Play应用商店有望支持 XR 头显,AR / VR设备有望得到发展
据 Android Authority 报道,谷歌似乎正在为其 Play 商店增加对 XR 头显的支持。该媒体在 Play 商店的代码中发现了相关的线索,包括一个代表头显的小图标以及对“XR 头显”的提及。 谷歌也可能改变了此前拒绝将 Play 商店引入 Meta Quest 头显的决定。今…...

关于read/write 网络IO、硬盘IO的区别
对于read/write API,在数据在不超过指定的长度的时候有多少读多少,没有数据则会一直等待。 因此,对于网络IO,由于我们无法知道网络对面什么时候准备好数据,什么时候发起数据。所以使用read/write的话,可能…...
常抛异常情况以及处理方法汇总)
vue2开发 对接后端(go语言)常抛异常情况以及处理方法汇总
背景 在Vue2开发中,与后端(Go语言)接口对接时出现异常通常是由于前后端之间的数据交互出现了问题。常见的异常包括数据格式不匹配、请求方法不匹配、请求头部信息错误、跨域请求问题等。 常见异常 如出现报错提示: json : can…...

LSTM:解决梯度消失与长期依赖问题
LSTM:解决梯度消失与长期依赖问题 长短期记忆网络(LSTM)是一种特殊类型的递归神经网络(RNN),设计用来克服标准RNN在处理长序列数据时遇到的梯度消失问题。下面是对您提供的LSTM特性描述的详细解释…...

EinDecomp:基于爱因斯坦求和与张量关系代数的自动张量并行分解算法
1. 项目概述:从张量计算的并行困境到EinDecomp的破局思路如果你深度参与过大规模机器学习模型的训练或高维科学计算,一定对“并行”这个词又爱又恨。爱的是,它几乎是处理海量数据和复杂模型的唯一出路;恨的是,为了实现…...
是如何炼成的?)
深入Linux内核:PTP硬件时间戳(HW Timestamping)是如何炼成的?
深入Linux内核:PTP硬件时间戳(HW Timestamping)的实现机制与技术解析 1. 高精度时间同步的技术演进与PTP核心价值 在现代分布式系统中,时间同步精度已经从毫秒级演进到纳秒级需求。金融交易系统要求时间偏差小于100纳秒ÿ…...
:金融、电商、教育三大垂直领域实测数据首度公开)
企业级AI写作Agent部署全链路(从POC到规模化上线):金融、电商、教育三大垂直领域实测数据首度公开
更多请点击: https://kaifayun.com 第一章:企业级AI写作Agent部署全链路(从POC到规模化上线):金融、电商、教育三大垂直领域实测数据首度公开 企业级AI写作Agent的落地并非模型调用的简单叠加,而是涵盖需求…...

CON-FOLD算法:为可解释规则注入置信度与剪枝优化
1. 项目概述:为规则赋予“可信度”的CON-FOLD算法在可解释机器学习(XAI)领域,我们常常面临一个核心矛盾:模型的可解释性与预测的可靠性如何兼得?像决策树、规则列表这类模型,其决策路径清晰可见…...

Ubuntu 22.04双网卡配置踩坑记:netplan apply报错‘默认路由冲突’的三种解法
Ubuntu 22.04双网卡路由冲突实战指南:从紧急修复到高阶策略当你为Ubuntu服务器配置双网卡时,netplan apply命令突然抛出"Conflicting default route declarations for IPv4"错误,这种场景对运维工程师来说再熟悉不过。本文将带你深…...

字节Seed基座GR3机器人的专属控制内核,具备柔性物体操控、人体姿态复刻、工业闭环作业等功能
全称:Gesture Real-Time Reinforcement Learning 全域实时姿态强化学习具身控制框架 内部代号:GR-RL V5.9.2 稳态正式版 隶属体系:字节Seed基座GR3机器人专属控制内核 核心用途:全品类柔性物体操控、人体仿生姿态复刻、工业高精度…...

3步快速上手SSDD:合成孔径雷达舰船检测终极指南
3步快速上手SSDD:合成孔径雷达舰船检测终极指南 【免费下载链接】Official-SSDD SAR Ship Detection Dataset (SSDD): Official Release and Comprehensive Data Analysis 项目地址: https://gitcode.com/gh_mirrors/of/Official-SSDD SSDD(SAR S…...
)
手把手教你用Python+OpenBMI复现运动想象BCI实验(附完整代码与数据集)
Python实战:从OpenBMI到运动想象脑机接口的全流程复现指南在认知科学与脑机接口(BCI)研究领域,运动想象(Motor Imagery)实验一直是经典范式。传统上,这类实验多依赖Matlab生态完成,但随着Python在科学计算领域的崛起,越…...
)
保姆级教程:用Arbe或大陆4D毫米波雷达点云数据,手把手实现Freespace检测(附Python伪代码)
毫米波雷达点云实战:从数据到可行驶区域的完整工程指南在自动驾驶感知系统中,可行驶区域检测(Freespace)直接决定了车辆路径规划的可行空间边界。相比激光雷达和摄像头方案,4D毫米波雷达凭借全天候工作能力、成本优势和…...

PwnKit漏洞深度解析:pkexec环境变量劫持与Linux提权原理
1. 这个漏洞不是“又一个提权”,而是Linux权限模型的照妖镜你可能已经看过不少关于CVE-2021-4034的通报,标题里常带着“高危”“远程可利用”“影响所有主流发行版”这类字眼。但说实话,我第一次在Debian 11上复现成功时,并没有立…...