《基于深度学习的车辆行驶三维环境双目感知方法研究》
复原论文思路:
《基于深度学习的车辆行驶三维环境双目感知方法研究》
1、双目测距的原理


按照上述公式算的话,求d的话,只和xl-xr有关系,这样一来,是不是只要两张图像上一个测试点的像素位置确定,对应的深度信息就是确定的?理论上就应该这样!
参考链接:相机模型和双目立体匹配_双目相机位姿关系如何确定-CSDN博客
2、如果步骤1 可以得到深度信息,论文中为什么还要通过投射结构光获取三维点云信息?
2.1 双目相机不主动对外发射光源,因此称为被动深度相机;
1.优点
不需要结构光、TOF的发射器和接收器,因此结构简单硬件成本低,适合成本敏感的应用场景。因为依靠自然光,可在室内外使用。
2.缺点
强光、暗光影响较大,因为依赖于自然光。对无纹理的物体或表面影响较大,如纯色墙,因双目相机依据视觉特征进行图像匹配,单一问题会引起匹配失效。
2.2 双目相机发射结构光
主要硬件有投射仪、相机,通过投射仪主动发射(因此称为主动测量)一束光源(通常是红外线激光)来照亮物体表面,并通过相机镜头来捕捉反射回来的光线。
1.优点
近距离(1米内)精度较高,毫米级。测量范围广、对光线和颜色的敏感度低等。主动投影,适合弱光照使用。
2.缺点
测量距离和分辨率存在一定的局限性。远距离精度差,随着距离的拉长,精度也随之变差。对环境光的干扰较大,室外强光照不宜使用,强光容易干扰投影光。
参考链接:https://blog.csdn.net/oakchina/article/details/130703831
相关文章:
《基于深度学习的车辆行驶三维环境双目感知方法研究》
复原论文思路: 《基于深度学习的车辆行驶三维环境双目感知方法研究》 1、双目测距的原理 按照上述公式算的话,求d的话,只和xl-xr有关系,这样一来,是不是只要两张图像上一个测试点的像素位置确定,对应的深…...

jwt用户登录,网关给微服务传递用户信息,以及微服务间feign调用传递用户信息
1、引入jwt依赖 <dependency><groupId>io.jsonwebtoken</groupId><artifactId>jjwt</artifactId><version>0.9.1</version></dependency> 2、Jwt工具类,生成token以及解析token package com.niuniu.gateway.uti…...

ubontu安装anaconda
1.下载 Anaconda 安装脚本 2. 复制到服务器上/home/username文件夹中,进入文件夹,执行: bash Anaconda3-2024.10-1-Linux-x86_64.sh一直按回车,然后输入yes同意协议。 3. 初始化 Anaconda 环境,会自动配置环境变量&a…...

【Docker容器化技术】docker安装与配置、常用命令、容器数据卷、应用部署实战、Dockerfile、服务编排docker-compose、私有仓库
文章目录 一、Docker的安装与配置1、docker概述2、安装docker3、docker架构4、配置镜像加速器 二、Docker命令1、服务相关命令2、镜像相关命令3、容器相关命令 三、Docker容器数据卷1、数据卷概念及作用2、配置数据卷3、配置数据卷容器 四、Docker应用部署实战1、部署MySQL2、部…...

Python模拟A卷实操题
1.某机械公司生产两种产品。A的单件利润分别是100元,B的单件利润是150元。 每种产品由三种材料构成,现给出每种材料的库存(库存小于100000),求利润最大的生产方案。输入说明:第一行给出生产每件A产品所需要…...
Leetcode 检测相邻递增子数组
3349. 检测相邻递增子数组 I 给你一个由 n 个整数组成的数组 nums ,请你找出 k 的 最大值,使得存在 两个 相邻 且长度为 k 的 严格递增 子数组 。具体来说,需要检查是否存在从下标 a 和 b (a < b) 开始的 两个 子数组,并满…...

rockylinux 8安装 gcc11.2
方法 1:从源代码编译安装最新版本的 GCC 下载 GCC 源代码: 访问 GCC 官方网站下载最新版本的源代码,例如: wget https://ftp.gnu.org/gnu/gcc/gcc-11.2.0/gcc-11.2.0.tar.gz tar -xf gcc-11.2.0.tar.gz cd gcc-11.2.0安装依赖项&a…...
-奇数序列排序)
【蓝桥等考C++真题】蓝桥杯等级考试C++组第13级L13真题原题(含答案)-奇数序列排序
C L13 奇数序列排序 给定一个长度为N的正整数序列, 请将其中的所有奇数取出,并按增序(从小到大)输出。 输入: 共2行 第1行是一个正整数 N(不大于500); 第2行有 N 个正整数&#x…...

【AI】好用的AI记录
好用的AI 一、国内 KIMI通义 二、国外 GPT4Cursorv0...

linux安装boost.python
前言 boost.python库被用于C与Python代码间的交互,提供了两者间大部分数据类型的转换 相关环境 操作系统:Ubuntu 20.04 python版本:Python 3.8 boost版本:boost 1.78.0 安装 1.boost.python检查与卸载 在安装boost之前需要检…...

AI 扩展开发者思维方式:以 SQL 查询优化为例
在现代软件开发中,AI 技术的兴起让开发者的思维方式发生了显著变化。尤其是在 SQL 查询优化、代码重构以及算法设计等领域,AI 提供的建议不仅扩展了开发者的思考路径,还帮助他们发现以往没有意识到的潜在解决方案。 1. 传统思维模式下的 SQL…...
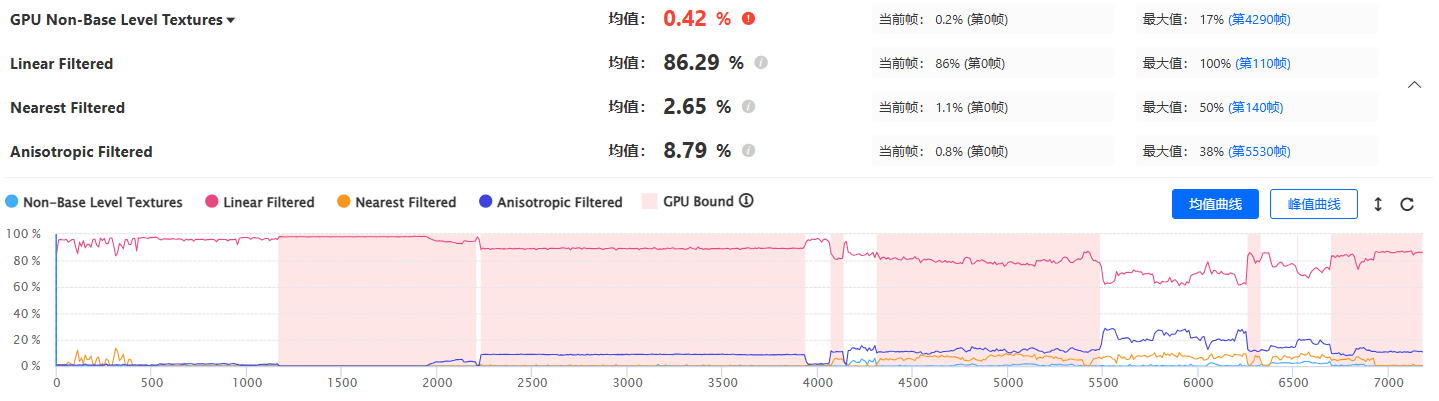
自定义面板,高效的游戏性能分析利器
为了更有效地聚焦并解决性能问题,UWA报告采用了分模块监控策略,确保每个模块独立成章,各司其职。然而,随着对性能分析需求的不断升级,我们已经意识到,在深入分析某些跨模块的性能瓶颈或优化点时,…...
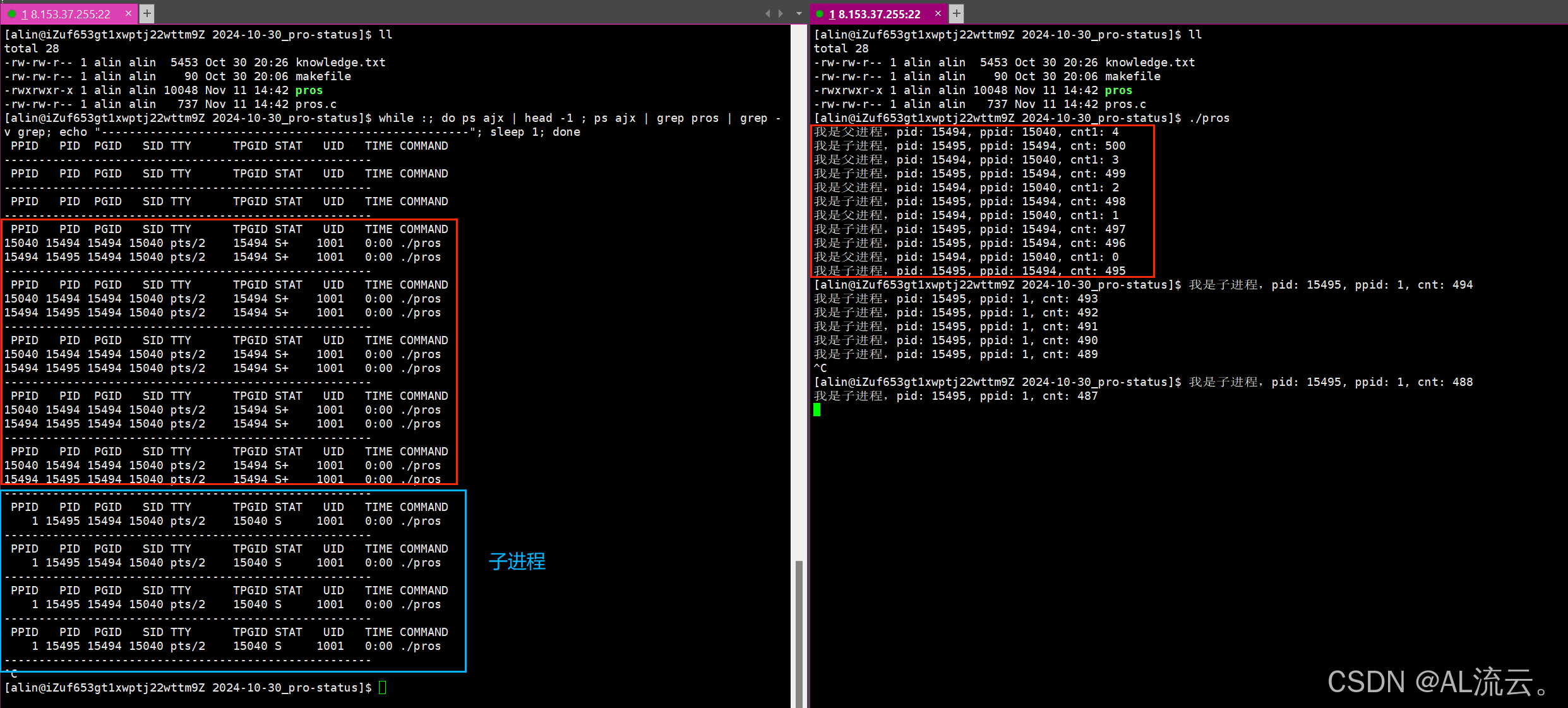
【Linux进程特别篇】深度理解辨识僵尸进程和孤儿进程
--------------------------------------------------------------------------------------------------------------------------------- 每日鸡汤:每一份坚持都是成功的积累,只要相信自己,总会遇到惊喜。 -----------------------------…...

喜报|超维机器人荣获昇腾AI创新大赛铜奖
近日,在备受瞩目的昇腾AI创新大赛中,超维机器人凭借扎实的技术实力和创新产品,荣获大赛铜奖。这一荣誉不仅展现了超维机器人在智能巡检领域的技术创新与突破,也标志着超维机器人的智能巡检解决方案在人工智能领域获得了广泛认可&a…...

从五种架构风格推导出HTTP的REST架构
在分布式系统中,架构风格(Architectural Style)决定了系统组件如何交互、通信、存储和管理数据。每种架构风格都有其独特的特性和适用场景。本文将从五种典型的架构风格出发,逐步探讨它们如何影响了REST(Representational State Transfer,表述性状态转移)架构风格的设计…...

vue-h5:在h5中实现相机拍照加上身份证人相框和国徽框
方案1:排出来照片太糊了,效果不好 1.基础功能 参考: https://blog.csdn.net/weixin_45148022/article/details/135696629 https://juejin.cn/post/7327353533618978842?searchId20241101133433B2BB37A081FD6A02DA60 https://www.freesio…...

免费HTML模板和CSS样式网站汇总
HTML模板:(注意版权,部分不可商用) 1、Tooplate,免费HTML模板下载 Download 60 Free HTML Templates for your websitesDownload 60 free HTML website templates or responsive Bootstrap templates instantly from T…...
备份特殊文件)
Mac打开time machine(时间机器)备份特殊文件
Mac 打开time machine(时间机器)备份特殊文件 设置“时间机器”的作用具体操作办法 前言:今天在使用Nas同步文件时发现有部分重要文件没有同步,为了省事手动拖拽复制文件,导致其中一份非常重要的文件丢失,尝…...

Qt 学习第十六天:文件和事件
一、创建widget对象(文件) 二、设计ui界面 放一个label标签上去,设置成box就可以显示边框了 三、新建Mylabel类 四、提升ui界面的label标签为Mylabel 五、修改mylabel.h,mylabel.cpp #ifndef MYLABEL_H #define MYLABEL_H#incl…...

nvm 切换 Node.js 版本
nvm 切换 Node.js 版本 0. nvm 安装1. 查看装了哪些 Node.js 版本2. 安装 Node.js 版本安装最新稳定版本.安装个18 3. 切换 Node.js 版本4. 设置默认 Node.js 版本5. 卸载 Node.js 版本6.与项目的配合使用参考资料 0. nvm 安装 安装教程就不写了,直接看别人的。 脚…...
)
AI Agent在仓储分拣中的真实效能验证(2023-2024全国12家仓配中心压测报告首次公开)
更多请点击: https://intelliparadigm.com 第一章:AI Agent物流行业应用 AI Agent正深度重构物流行业的决策、执行与协同范式。区别于传统规则引擎或单一预测模型,AI Agent具备感知环境、自主规划、多步推理与动态反馈能力,可嵌入…...

顶伯 + 微软 TTS 对比 Edge 浏览器自带 TTS,差距有多大?
付费 vs 免费:顶伯 微软 TTS 对比 Edge 浏览器自带 TTS,差距有多大?在文字转语音领域,微软 TTS 技术一直备受好评,但不同平台的实现方式却带来截然不同的体验。顶伯文字转语音工具深度整合了微软 TTS 引擎,…...

linux IO重定向
IO中的文件描述符0 ,stdin, 标准输入, 指向键盘 1 ,stdout, 标准输出, 指向终端屏幕 2 ,stderr, 标准错误输出, 指向终端屏幕 /dev/null 无底洞,有些不想要的输出信息可以送到这里。& , 在重定向中引用文件描述符.例子.2>&1 , 把 stderr(文…...

Taotoken多模型路由在单一服务故障时的体验保障
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken多模型路由在单一服务故障时的体验保障 1. 引言 在构建依赖大模型能力的应用时,服务的稳定性是开发者必须面对…...

3DS原生GBA硬件实战指南:open_agb_firm深度解析与高效方案
3DS原生GBA硬件实战指南:open_agb_firm深度解析与高效方案 【免费下载链接】open_agb_firm open_agb_firm is a bare metal app for running GBA homebrew/games using the 3DS builtin GBA hardware. 项目地址: https://gitcode.com/gh_mirrors/op/open_agb_firm…...

ESP-IDF+vscode开发ESP32第十三讲——NVS
目录 一、NVS梳理 1.1 分区 (Partition):NVS 的专属“仓库” 1.2 页面 (Page):仓库里的“货架” 1.3 条目 (Entry):货架上的“最小存储格” 1.4 键值对 (Key-Value Pair):实际存放的“货物” 1.5 命名空间 (Namespace)&…...

为Claude Code配置Taotoken密钥与模型解决访问限制
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Claude Code配置Taotoken密钥与模型解决访问限制 Claude Code 作为一款高效的编程助手,其原生服务有时会因地域或配额…...

FTP明文传输风险与Wireshark抓包实证分析
1. 这不是危言耸听:FTP 的“裸奔”现状每天都在发生你有没有在公司内网用过 FTP 上传一份财务报表?有没有在校园网里用 FileZilla 向老师提交课程设计源码?有没有在运维后台用 ftp 命令同步过网站静态资源?如果答案是肯定的&#…...

RLHF实战指南:从人类反馈到对齐AI的工程化路径
1. 项目概述:当AI学会“听人话”——人类反馈如何真正撬动强化学习的天花板你有没有试过教一只特别聪明但完全不懂人情世故的助手做事?比如,你想让它帮你写一封得体又不失温度的辞职信,它却交出一份逻辑严密、用词精准、但通篇“根…...

攻克葫芦科转化难题:甜瓜高效遗传转化体系构建与服务实践
一、 引言 甜瓜(Cucumis meloL.)作为重要的葫芦科经济作物,其遗传转化是开展基因功能验证、分子育种及品质改良的关键技术瓶颈。由于甜瓜普遍存在基因型依赖性强、再生频率低等问题,建立一套稳定、高效的遗传转化体系对科研工作至…...