三维点云 和模型转换的问题

随着科技的发展,三维激光扫描采集的点云数据作为一种新型的数据形式,在多个领域中都展现出了其强大的应用价值。那么,什么是点云数据?它是如何生成的?又能为我们的生活和工作带来哪些便利呢?
1.什么是三维点云
三维点云数据(3D Point Cloud)是一种用于表示三维空间中对象或场景的数据结构。在最基础的形式中,它是一个包含多个三维坐标点(X,Y,Z)的集合。
① 点云是空间中的一组数据点,这些点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值等等。
② 点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合。
③ 点云一般是由三维激光扫描仪采集获取,3D扫描仪在物体外部表面、围绕这些物体测量许多点。这些点是通过对实际物体或场景表面进行离散采样而获得的,因此,点云可以被视为场景表面在给定坐标系下的离散表示。


2.主要特点
① 高度灵活性:点云可以用于表示任何类型的三维形状,包括不规则形状;
② 数据密度可变性:点云的密度可以非常不同,从只包含一个点(称为孤点或奇点)到包含几百万个数据点的高密度点云;
③ 附加信息丰富性:除了基本的三维坐标外,点云数据还可能包含其他属性,如颜色、分类值、强度值和时间等
3.点云数据的生成
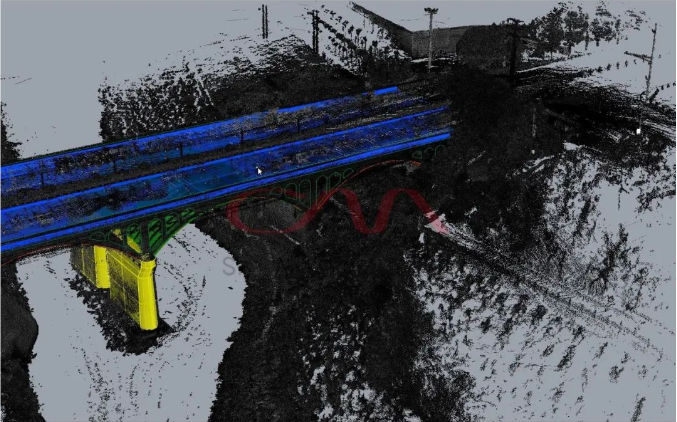
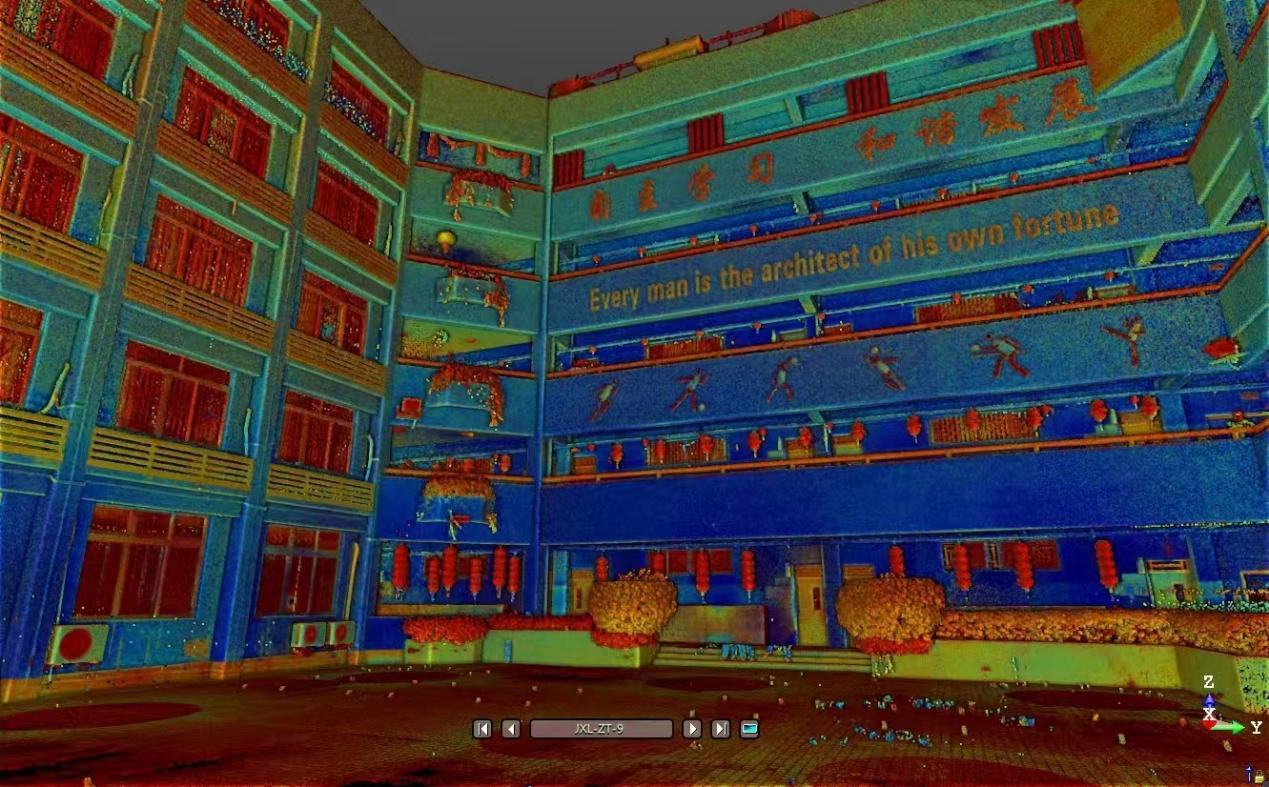
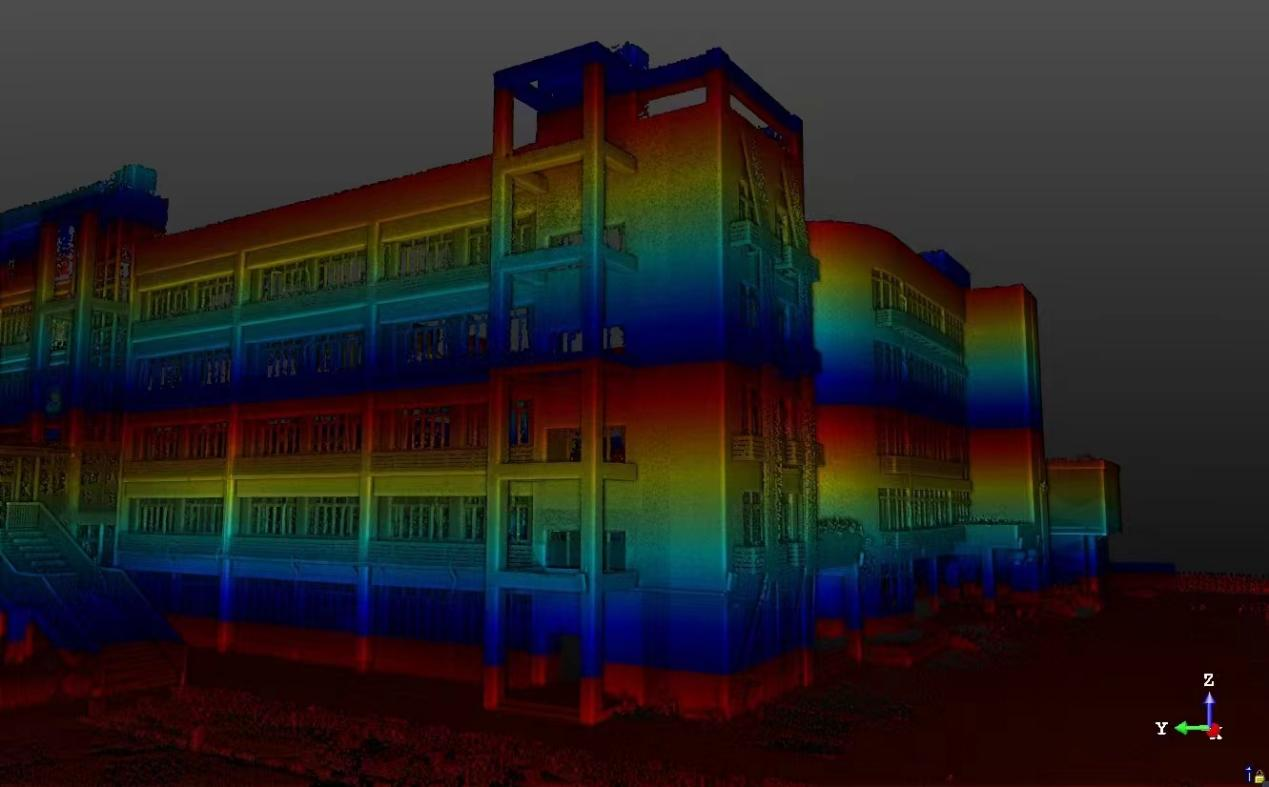
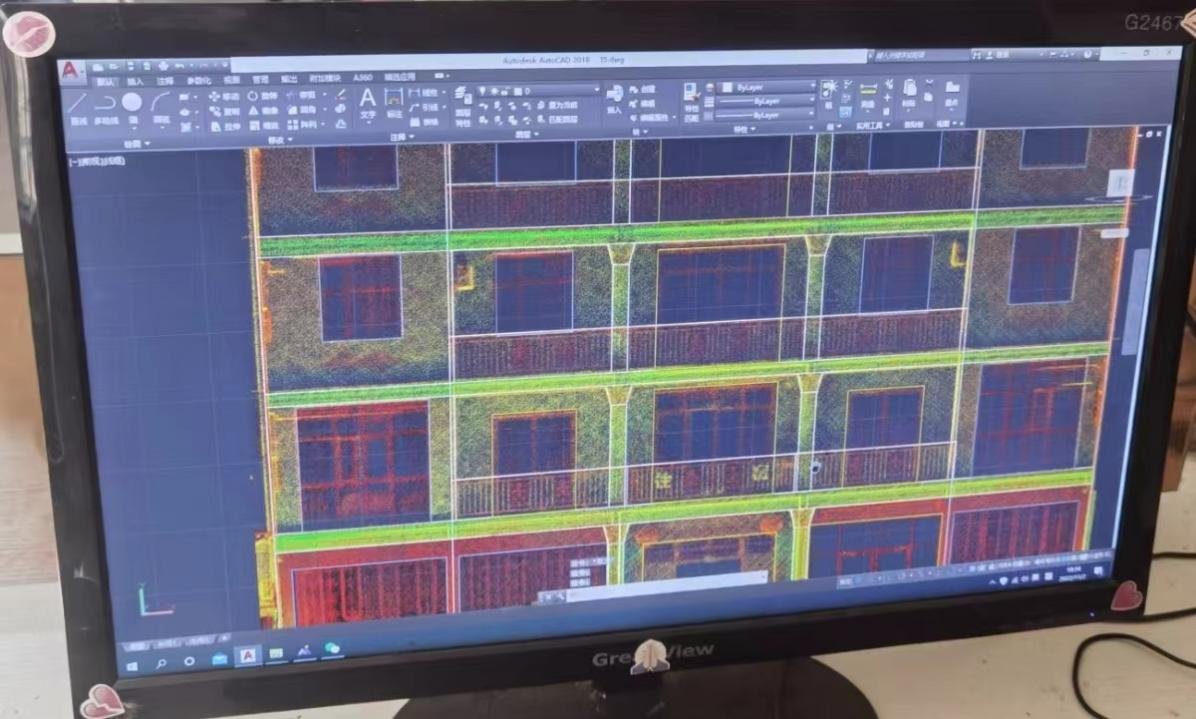
点云数据是通过三维激光扫描、结构光等技术手段,对物体表面进行大量密集的测量,从而获取物体表面的三维坐标数据。当我们利用三维激光扫描仪扫描某一建筑表面时,我们可以得到大量密集的点,这些点带有三维坐标(XYZ)、激光反射强度和和颜色信息(RGB)等信息,它们共同创建了可识别的三维结构。
简单来说,当我们使用这些高科技设备对物体进行扫描时,设备会发出激光束或结构光,通过测量激光或光线与物体表面相交点的位置,就可以得到物体表面的点云数据。点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。
4.点云建模的应用
点云在三维建模中的应用非常广泛,以下是几个主要的应用领域:
① 三维重建与建模
这是点云技术最直接的应用之一。通过采集现实世界的点云数据,利用ContextCapture/3Dmax/Revit/Geomagic等实景三维建模软件进行处理,可以生成逼真的三维模型。这些模型可以用于虚拟现实、游戏开发、仿真训练等领域。例如,在虚拟现实游戏中,点云数据可用于创建真实感强烈的虚拟环境。
② 地形和地貌重建
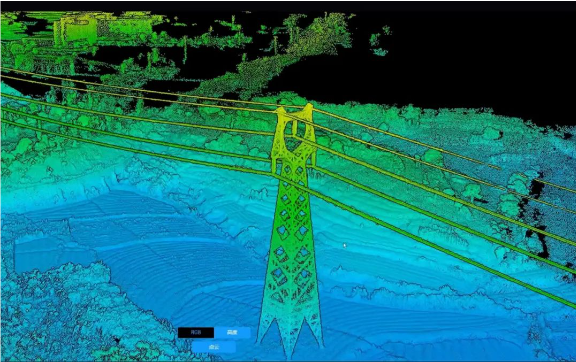
三维激光扫描点云技术可以用于地形和地貌的三维重建,通过三维激光扫描或航空激光雷达获取地面的点云数据,然后对点云数据进行处理和分析,提取地形特征和地貌信息,可以生成高精度的地形模型,用于土地规划、水文分析等应用。


③ 工程建模
在建筑工程中,通过激光扫描仪等设备获取的点云数据,可以利用ContextCapture/3Dmax/Revit/Geomagic等实景三维建模软件生成建筑物的三维模型。这种模型可以用于工程设计和分析,如结构评估、碰撞检测等。
④ 医学图像处理和人体建模
在医学领域,点云重建可以用于医学影像数据的处理,如CT、MRI等。通过点云重建,可以实现准确的医学诊断和手术规划。此外,点云技术还可以用于人体建模,如制作个性化的假肢或矫形器等。
⑤ 物体检测与识别
在自动驾驶、机器人导航等领域,点云数据可以用于检测和识别环境中的物体。通过处理和分析点云数据,可以准确地获取物体的位置、形状和姿态等信息,从而实现精准的定位和导航。
⑥ 文物保护
点云技术可以用于文物和古迹的三维重建和保护,通过激光扫描或摄影测量获取文物或古迹的点云数据,然后对点云数据进行处理和分析,分析它的几何特征和属性信息,重建文物或古迹的三维模型,以实现对其的保护、展示和研究。

⑦ 工业设计和制造
在工业领域,点云技术可以用于工业设计和制造,通过激光扫描或光学测量获取工业产品或零部件的点云数据,然后对点云数据进行处理和分析,提取产品或零部件的特征信息,最终实现对其的设计、检测和制造。
点云涉及的领域技术非常广泛,包括但不限于以下几种:
① 点云滤波:这是数据预处理阶段的一个重要步骤,主要是滤掉噪声和其他不需要的数据。点云滤波的方法有很多种,例如双边滤波、高斯滤波、条件滤波、直通滤波、随机采样一致滤波、VoxelGrid滤波等。
② 点云关键点提取:关键点是在二维图像上常用的特征提取算法,可以推广到三维空间。常见的三维点云关键点提取算法有ISS3D、Harris3D、NARF、SIFT3D等。
③ 特征和特征描述:除了关键点,点云数据还需要计算一些额外的参数,例如法线方向、曲率、文理特征等。这些特征描述算法有法线和曲率计算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image等。
④ 点云配准:这是将多个点云数据进行对齐的过程,常用的配准算法有正太分布变换和著名的ICP点云配准等。
⑤ SLAM图优化:SLAM技术中,点云数据需要通过图优化工具进行优化,常用的工具包括g2o、LUM、ELCH等。
⑥ 目标识别检索:这是点云数据处理中一个偏应用层面的问题,常使用Hausdorff距离来进行深度图的目标识别和检索。
⑦ 变化检测:无序点云在连续变化中,八叉树算法常常被用于检测变化,与关键点提取技术结合起来使用。
⑧ 三维重建:从一个个孤立的点云数据中获得整个曲面,常用的三维重建算法和技术有泊松重建、Delauary triangulatoins 表面重建等。
⑨ 点云数据管理:主要包含点云压缩、点云索引(KDtree、Octree)、点云LOD(金字塔)等,用于海量点云的渲染。
⑩ 点云分割与分类:这是目标识别的基础,分割的方法包括区域提取、线面提取、语义分割与聚类等。分类则包括基于点的分类和基于分割的分类等。
5.点云数据建模的方法及流程
点云数据建模是指利用点云数据构建三维模型的过程。点云数据建模的主要应用场景包括建筑建模、地形测绘、文化遗产保护、工业检测、医疗影像分析等。

点云数据建模的方法包括但不限于以下几种:
① 表面重建方法:通过点云数据生成曲面模型,常见的算法包括Delaunay三角化、Ball Pivoting等。
② 插值方法:对点云数据进行插值计算,生成连续的曲面模型,常见的算法包括移动最小二乘法(Moving Least Squares,MLS)、样条插值等。
③ 体积建模方法:通过点云数据构建三维体素模型,常见的算法包括体素化、八叉树等。
将点云数据转化为三维模型的过程通常包括以下几个步骤:
① 数据采集:使用激光扫描仪、三维相机等设备采集点云数据。
② 数据预处理:对原始的点云数据进行去噪、滤波等处理,以消除数据中的错误和冗余信息。在三维激光扫描的过程中,点云数据的获取常常会受到物体遮挡、光照不均匀等因素的影响,容易造成复杂形状物体的区域扫描盲点,形成孔洞。同时由于扫描测量范围有限,对于大尺寸物体或者大范围场景,不能一次性进行完整测量,必须多次扫描测量,因此扫描结果往往是多块具有不同坐标系统且存在噪声的点云数据,不能够完全满足人们对数字化模型真实度和实时性的要求,所以需要对三维点云数据进行去噪、简化、配准以及补洞等预处理。通过数据预处理,可以有效剔除点云中的噪声和外点,在保持几何特征的基础上实现点云数据简化,并将不同角度扫描的点云统一到同一坐标系下,为后续的曲面构建及三维实体模型生成提供稳健的数据基础。
③ 特征提取:从预处理后的点云数据中提取特征,包括几何特征、纹理特征等。
④ 数据配准:将不同视角或不同时间获取的点云数据进行对齐,确保它们能够准确地拼接在一起。
⑤ 表面重建:基于处理后的点云数据,利用三角剖分、泊松重建等算法,生成物体的表面模型。
⑥ 模型优化:对生成的三维模型进行细节增强、平滑处理等优化操作,使模型更加真实、精细。
⑦ 模型输出:将优化后的三维模型进行输出,可导出为多种格式,如OBJ、STL等。
通过上述步骤,我们就可以将点云数据转化为三维模型,为后续的分析、设计等工作提供便利。
在实际工作中,我们可以利用Trimble RealWorks 点云后处理软件进行预处理,然后利用ContextCapture/3Dmax/Revit/Geomagic等实景三维建模软件、对点云数据进行三维重建。ContextCapture/3Dmax/Revit/Geomagic等实景三维建模软件可以更好地评估点云并生成更精确的三维模型,可以对点云进行增强、分割、分类,并与工程模型相结合。利用ContextCapture/3Dmax/Revit/Geomagic等实景三维建模软件的高级三维建模、横截面切割、断裂线和地形提取功能,能快速高效地对竣工条件进行建模并支持设计流程。如通过将点云数据导入到ContextCapture/3Dmax/Revit/Geomagic等实景三维建模软件中,经过图像定位和定向、生成点云、点云编辑和处理等流程,就可以快速进行点云三维重建。
点云数据与实景影像融合成果,基于点云数据,还可以从生成非常庞大的可缩放地形模型。通过与原始数据源同步,可缩放地形模型可实时更新到最新。这样做的价值在于,拥有所有数据的全局、最新和综合表示,并用于使用各种显示模式和执行分析,以及生成动画和可视化效果。
6.点云建模的优势
① 高精度测量:点云建模能够提供非常高精度的三维坐标数据。与传统的测量方法相比,点云建模不受视线限制,能够准确地捕捉到物体的每一个细节,包括复杂的几何形状和细微的表面变化。
② 高效率:传统的勘测方法往往需要耗费大量的人力和时间。而点云建模技术则能够快速地获取大量的数据,并且通过自动化的数据处理和分析软件,可以极大地提高工作效率。
③ 非接触式测量:点云建模通常不需要与被测物体进行物理接触,这就避免了因接触而产生的误差和可能的物体损伤。
④ 丰富的信息获取:除了物体的三维坐标外,点云数据还可以包含颜色、纹理等丰富的信息,这对于后续的模型处理和应用非常有利。
⑤ 灵活的应用场景:无论是室内还是室外,无论是大型建筑物还是细小的文物,点云建模技术都能够适应不同的应用场景,展现出其强大的适应性。
7.点云主要应用领域
点云被广泛应用于许多领域,包括创建3D CAD模型用于工业生产部分,用于度量与质量检测,还有用于大量的视觉、动画、渲染以及大规模定制的应用。点云可以解决很多问题,在多个领域都有应用。
① 首先,点云可以用于环境感知与障碍物检测,为自动驾驶系统提供精确的三维空间信息,实现精准导航与运动规划。
② 其次,在增强现实与虚拟现实方面,点云数据可以构建真实的三维环境,与虚拟对象进行融合,创造沉浸式的交互体验,应用于各类训练模拟器和娱乐场景。
③ 此外,点云还被用于建筑设计与管理,将点云与BIM建筑信息模型相结合,可以实现现有建筑的数字化管理与维护,也可以辅助新建筑的设计规划。
④ 另外,在机器视觉与目标识别领域,点云是计算机视觉处理的三维数据输入,可以用于三维目标检测、跟踪、识别和语义分割等,广泛应用于智能制造与服务机器人等领域。
⑤ 最后,点云还被应用于三维测绘与监测,利用点云数据可以实现高精度的三维测量与建筑物倾斜检测,用于安全监测与质量控制。
相关文章:
三维点云 和模型转换的问题
随着科技的发展,三维激光扫描采集的点云数据作为一种新型的数据形式,在多个领域中都展现出了其强大的应用价值。那么,什么是点云数据?它是如何生成的?又能为我们的生活和工作带来哪些便利呢? 1.…...
黑马智数Day7
获取行车管理计费规则列表 封装接口 export function getRuleListAPI(params) {return request({url: parking/rule/list,params}) } 获取并渲染数据 import { getRuleListAPI } from /apis/carmounted() {this.getRuleList() }methods: {// 获取规则列表async getRuleList(…...
虚拟机安装Ubuntu 24.04服务器版(命令行版)
这个是专门用于服务器使用的,没有GUI,常用软件安装,见 虚拟机安装Ubuntu 24.04及其常用软件(2024.7)_ubuntu24.04-CSDN博客https://blog.csdn.net/weixin_42173947/article/details/140335522这里只记录独特的安装步骤 1 下载Ubuntu 24.04安…...
.net core开发windows程序在国产麒麟操作系统中运行
.net core自从3.1版本号后,完全是一个独立的开源的多平台开发组件,目前国产化是趋势,不少项目需要开发国产如Kylin操作系统中运行的程序,无论是Web程序还是桌面程序,都有这样的需求。 首先,可明确的的.net…...
【LinuxC编程】06 - 守护进程,线程
进程组和会话 概念和特性 进程组,也称之为作业。BSD于1980年前后向Unix中增加的一个新特性。代表一个或多个进程的集合。每个进程都属于一个进程组。在waitpid函数和kill函数的参数中都曾使用到。操作系统设计的进程组的概念,是为了简化对多个进程的管…...

<websocket><PLC>使用js和html实现webscoket,与PLC进行socket通讯的实例
前言 本文是为了实现从网页端通过websocket与PLC端的socket进行数据通讯。 环境配置 系统:windows 平台:visual studio code 语言:javascript、html、PLC 库:node.js 概述 本文的目的是通过网页端与PLC进行socket通讯,但web端一般并不是直接使用socket,而是websocket,…...
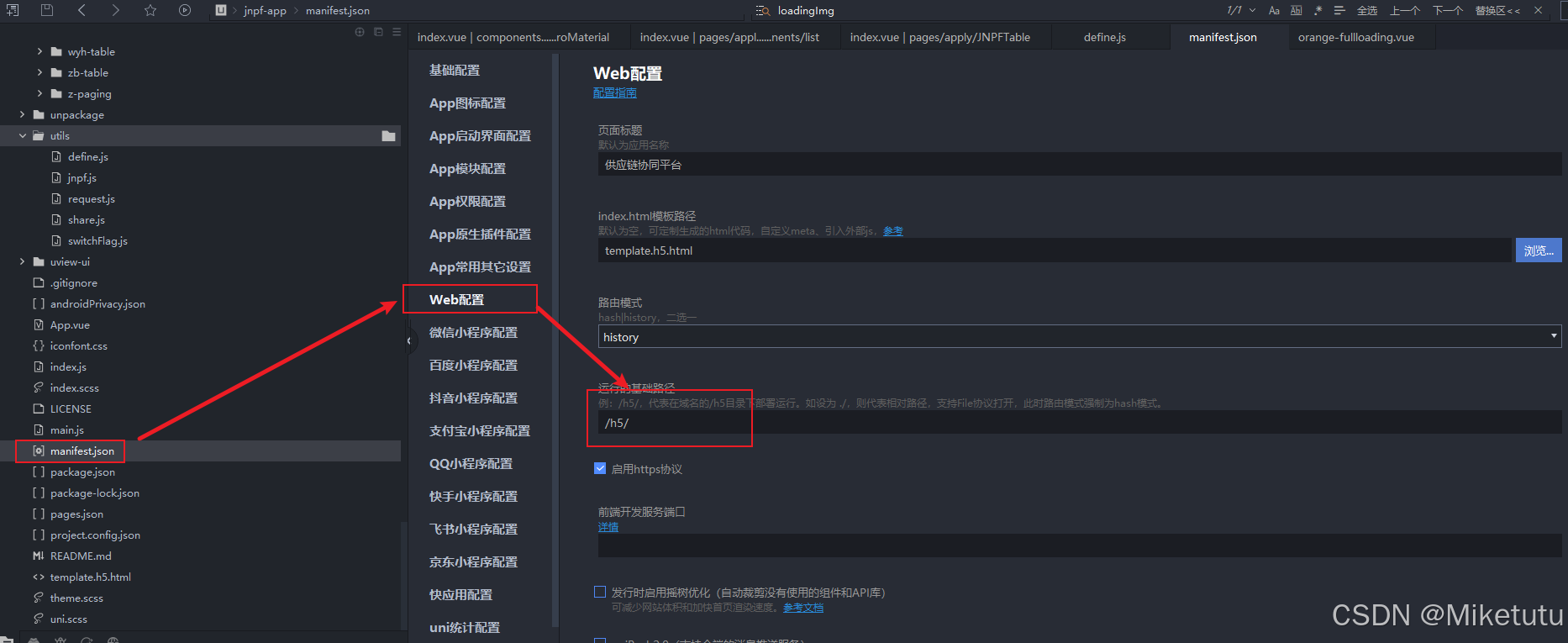
nginx部署H5端程序与PC端进行区分及代理多个项目及H5内页面刷新出现404问题。
在项目中会碰见需要在nginx代理多个项目,如果在加上uniapp开发的H5端的项目,你还要在nginx中区分PC端和手机H5端,这就会让人很头大!网上大部分的资料都是采用在nginx的conf配置文件中添加区分pc和手机端的变量例如:set…...
blenderFds代码解读
文章目录 一. 介绍1. FDS(Fire Dynamics Simulator)2. BlenderFDS 二. 下载代码三. 开发环境配置四. 代码解读1. blender python特有语法2. 代码结构2.1 变量名解释2.2 bl文件夹operators文件夹ui其他文件 2.2 lang文件夹bf_sceneON_GEOMON_MESHON_MOVEO…...
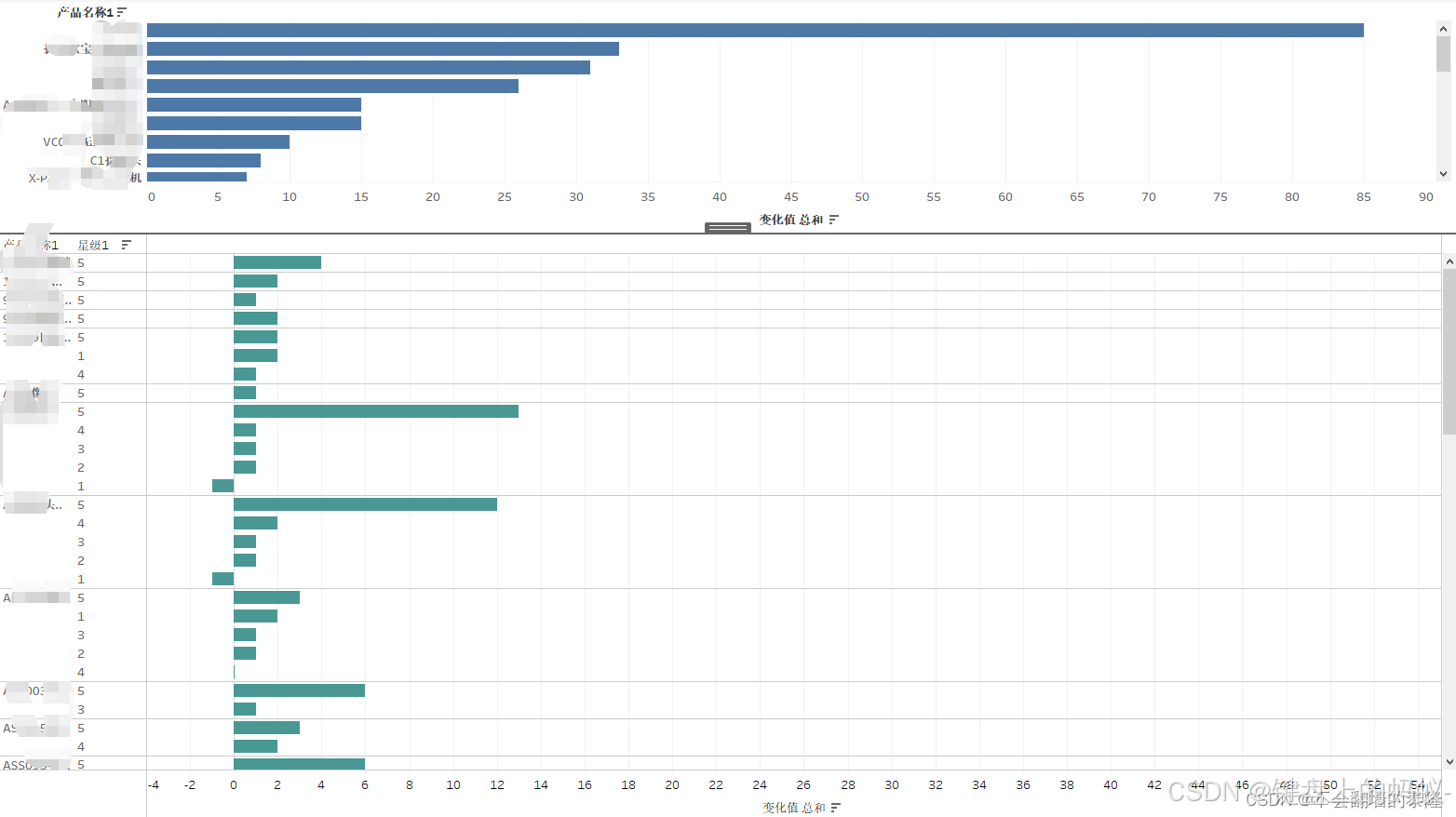
亚马逊评论爬虫+数据分析
爬取评论 做分析首先得有数据,数据是核心,而且要准确! 1、爬虫必要步骤,选好框架 2、开发所需数据 3、最后测试流程 这里我所选框架是seleniumrequest,很多人觉得selenium慢,确实不快,仅针对此…...
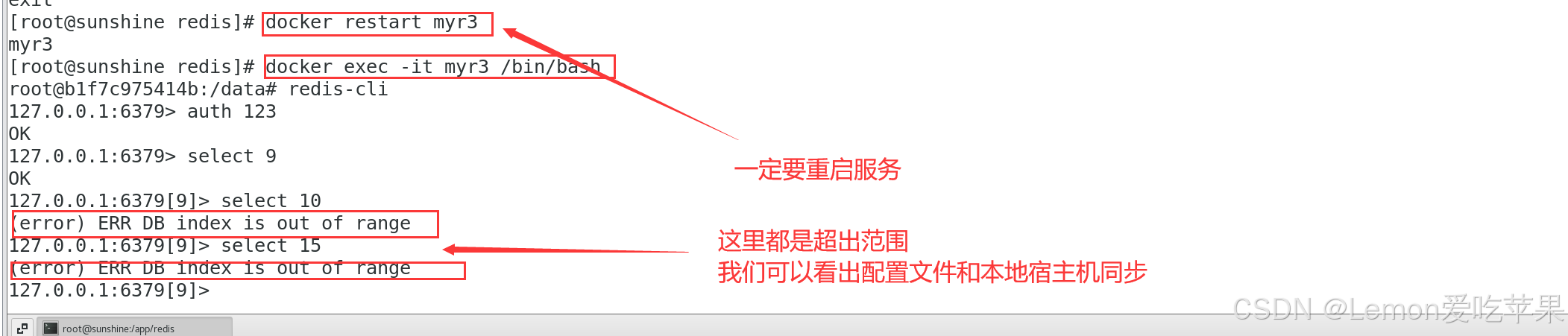
新手小白学习docker第六弹------Docker常规安装(安装tomcat、mysql、redis)
目录 1 总体步骤2 安装tomcat2.1 搜索镜像2.2 拉取镜像2.3 查看镜像2.4 启动镜像2.5 访问猫首页 3 安装mysql3.1 搜索镜像3.2 拉取镜像3.3 启动镜像 4 安装redis4.1 拉取镜像4.2 启动镜像(法1基础版)4.3 配置文件4.3.1 在宿主机下新建目录 /app/redis4.3…...
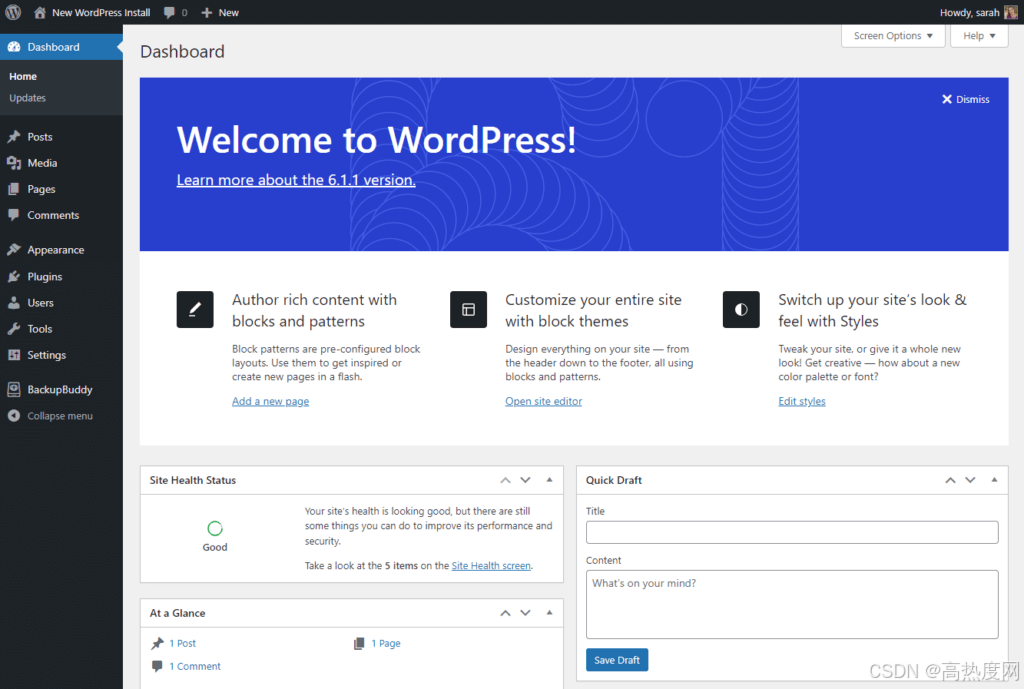
ReactPress与WordPress:两大开源发布平台的对比与选择
ReactPress与WordPress:两大开源发布平台的对比与选择 在当今数字化时代,内容管理系统(CMS)已成为各类网站和应用的核心组成部分。两款备受欢迎的开源发布平台——ReactPress和WordPress,各自拥有独特的优势和特点&am…...

机器情绪及抑郁症算法
🏡作者主页:点击! 🤖编程探索专栏:点击! ⏰️创作时间:2024年11月12日17点02分 点击开启你的论文编程之旅https://www.aspiringcode.com/content?id17230869054974 计算机来理解你的情绪&a…...

01-Ajax入门与axios使用、URL知识
欢迎来到“雪碧聊技术”CSDN博客! 在这里,您将踏入一个专注于Java开发技术的知识殿堂。无论您是Java编程的初学者,还是具有一定经验的开发者,相信我的博客都能为您提供宝贵的学习资源和实用技巧。作为您的技术向导,我将…...

第四十五章 Vue之Vuex模块化创建(module)
目录 一、引言 二、模块化拆分创建方式 三、模块化拆分完整代码 3.1. index.js 3.2. module1.js 3.3. module2.js 3.4. module3.js 3.5. main.js 3.6. App.vue 3.7. Son1.vue 3.8. Son2.vue 四、访问模块module的state 五、访问模块中的getters 六、mutati…...

[2024最新] macOS 发起 Bilibili 直播(不使用 OBS)
文章目录 1、B站账号 主播认证2、开启直播3、直播设置添加素材、隐私设置指定窗口添加/删除 窗口 4、其它说明官方直播帮助中心直播工具教程 目前搜到的 macOS 直播教程都比较古早,大部分都使用 OBS,一番探索下来,发现目前已经不需要 OBS了&a…...

Netty实现WebSocket Client三种典型方式
一、简单版本 package com.ptc.ai.box.biz.relay.client;import io.netty.bootstrap.Bootstrap; import io.netty.channel.Channel; import io.netty.channel.ChannelFuture; import io.netty.channel.ChannelFutureListener; import io.netty.channel.ChannelHandlerContext;…...
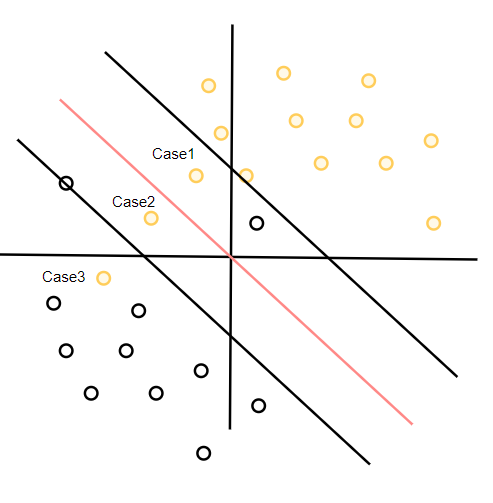
软间隔支持向量机
软间隔支持向量机 我们先直接给出软间隔支持向量机的形式: P min ω , b , ζ 1 2 ∥ ω ∥ 2 2 − C ∑ i 1 m ζ i s . t . y i ( ω x i b ) ≥ 1 − ζ i , i 1 , 2 , 3.. m ζ i ≥ 0 , i 1 , 2 , 3.. m P \min_{\omega,b,\zeta} \frac{1}{2}\Ve…...

在C++上实现反射用法
0. 简介 最近看很多端到端的工作,发现大多数都是基于mmdet3d来做的,而这个里面用的比较多的形式就是反射机制,这样其实可以比较好的通过类似plugin的形式完成模型模块的插入。当然我们这里不是来分析python的反射机制的。我们这篇文章主要来…...

【学术会议介绍,SPIE 出版】第四届计算机图形学、人工智能与数据处理国际学术会议 (ICCAID 2024,12月13-15日)
第四届计算机图形学、人工智能与数据处理国际学术会议 2024 4th International Conference on Computer Graphics, Artificial Intelligence and Data Processing (ICCAID 2024) 重要信息 大会官网:www.iccaid.net 大会时间:2024年12月13-15日 大会地…...
)
网络百问百答(一)
什么是链接? 链接是指两个设备之间的连接,它包括用于一个设备能够与另一个设备通信的电缆类型和协议。OSI参考模型的层次是什么? 有7个OSI层:物理层,数据链路层,网络层,传输层,会话层…...

* LangChain4j中的会话记忆ChatMemory
在构建 AI 志愿填报顾问时,一个很自然的期望是它能记住我们之前聊过什么,而不是每次都像第一次见面一样。大模型本身是无状态的,每次调用都是独立的,要实现“记忆”,唯一的方法就是把聊天历史连同新问题一起发给模型。…...

My-TODOs:跨平台桌面待办清单,解放您的生产力
My-TODOs:跨平台桌面待办清单,解放您的生产力 【免费下载链接】My-TODOs A cross-platform desktop To-Do list. 跨平台桌面待办小工具 项目地址: https://gitcode.com/gh_mirrors/my/My-TODOs 在信息过载的今天,如何高效管理日常任务…...

NoFences:免费开源桌面整理神器,让Windows桌面焕然一新
NoFences:免费开源桌面整理神器,让Windows桌面焕然一新 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为Windows桌面上杂乱无章的图标而烦恼吗&a…...

PyTorch新手必看:RuntimeError: mat1 and mat2 shapes cannot be multiplied 的三种常见场景与快速排查法
PyTorch矩阵维度冲突实战指南:从报错原理到精准修复 当你满怀期待地按下运行键,等待模型开始训练时,突然跳出的RuntimeError: mat1 and mat2 shapes cannot be multiplied就像一盆冷水浇下来。这个在PyTorch中频繁出现的矩阵乘法维度错误&am…...

09_AI审计平台设计:从风险识别出发而非从底稿编号出发
09 AI审计平台设计:从风险识别出发而非从底稿编号出发摘要:如果你打开一个审计系统,首页显示的是E1000、E2000、E3000这些底稿编号,那这个系统的设计者一定没搞明白审计师每天到底在想什么。我做了八年审计系统UX设计,…...

OBS多平台直播插件:一次推流,全网同步的终极解决方案
OBS多平台直播插件:一次推流,全网同步的终极解决方案 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 你是否曾经想过,一场精彩的直播内容可以同时出现…...
》读书笔记:异常检测方法梳理与实践理解)
《数据挖掘(主编:吕欣 王梦宁)》读书笔记:异常检测方法梳理与实践理解
《数据挖掘(主编:吕欣 王梦宁)》读书笔记:异常检测方法梳理与实践理解本文是学习《数据挖掘(主编:吕欣 王梦宁)》中“异常检测”相关内容后的整理笔记。文章不追求逐条复述教材,而是…...

DETR训练总找不到目标边界?手把手拆解Conditional DETR的cross-attention,教你精准定位
DETR训练中目标边界定位难题的深度解析与Conditional DETR实战指南 当你在训练DETR模型时,是否经常遇到模型在早期阶段难以准确捕捉目标边界的问题?比如大象的鼻子、斑马的蹄子这些关键部位总是模糊不清。这种现象背后隐藏着DETR架构中一个深层次的设计问…...

CANN/pypto PASS组件错误码说明
PASS 组件错误码说明文档 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto 范围:F40000-F44002本文档说明 PASS 组件的错误码定义、场…...

Q学习入门:用DQN训练乒乓AI的原理与实操
1. 项目概述:从乒乓游戏切入,理解Q学习如何让AI学会“思考下一步”你有没有试过盯着一个简单的乒乓球游戏界面发呆?球正朝右下角飞来,挡板在屏幕左侧,此时你的手指悬在键盘上方——是按上、按下,还是不动&a…...