【MATLAB】目标检测初探
文章目录
- 0 前言
- 1 目标检测概述
- 2 算法实践
- 2.1 YOLO v2
- 2.2 YOLO v3
- 3 项目实践
- 3.1 项目背景和数据集
- 3.2 实践结果
- 3.3 算法对比
- 4 工具箱与数据标注
- 5 总结
0 前言
之前因为项目原因,做了一个基于YOLOv5实现目标检测的程序,是基于Python做的,直接使用YOLOv5开源库,只需要导入数据训练再运行特定文件即可,简单的操作得到优秀的结果。因此当时没有仔细研究代码,更没有深究目标检测相关理论。最近学习了一些MATLAB中目标检测相关的内容,于是想结合官方文档和demo重新实现之前那个项目,作为一个入门参考。
1 目标检测概述
所谓目标检测(Object Detection),其核心任务是从图像或视频中识别并定位感兴趣的对象,这不仅要求高准确率的分类,还需要精确的位置预测。相比于图像分类(Classification)只需要知道图片中是什么(what),目标检测既要知道“what”,也要知道“where”。
目标检测经过二十多年的发展,从最初基于传统机器学习先提取特征,再进行图像分类,到现在使用卷积神经网络直接“端到端”,使特征提取自动化,同时也提高了目标检测的准确率。
目前基于深度学习实现目标检测主要有两类做法,一种称为两段式目标检测,即先通过一个网络筛选出感兴趣的区域(ROI),或者说存在目标可能性较大的区域,这一步叫做region proposal,然后再根据这些筛选出的region,判断其属于哪种类别,即图像分类,两段式的代表算法有R-CNN,SPPNet,Fast R-CNN,Faster R-CNN等;另一种方法叫做一段式目标检测,即将上述两个步骤合并到一起进行,没有单独的region proposal的步骤,两段式最具代表性的算法就是YOLO系列算法,目前已经发展出多个版本,从YOLO v1到YOLO v8(来自不同的研究团队),比较知名的还是YOLO v5.
所谓YOLO,即You Only Look Once,顾名思义,必然是一段式的
从研究情况来看,YOLO系列算法更受欢迎,各个YOLO系列算法也有各自的开源仓库(当然,都是Python的),目前MATLAB中已经支持YOLO v2,YOLO v3,YOLO v4,但没有和python开源仓库那种比较完善的,因此想基于帮助文档进行代码实践,对已有函数进行再次封装,提高其易用性的情况下测试一下我之前一个项目的数据集,并比较各算法优劣。
参考链接
2 算法实践
2.1 YOLO v2
首先来看MATLAB自带的一个示例,在命令行输入help help,打开帮助文档,直接搜索YOLO,找到这个链接:

点开之后可以得到一个训练检测车辆目标的demo:

上述demo链接直达
依次运行该代码,可以发现其实核心主要有三个步骤:准备数据,导入模型,设置训练参数,这也是训练核心函数trainYOLOv2ObjectDetector的必要参数。
trainYOLOv2ObjectDetector详解
接下来依次实现。其带注解代码如下所示
clear,clc
% 导入训练数据
data = load('vehicleTrainingData.mat');
trainingData = data.vehicleTrainingData;
% 对数据进行处理——相对路径转换成绝对路径
dataDir = fullfile(toolboxdir('vision'),'visiondata');
trainingData.imageFilename = fullfile(dataDir,trainingData.imageFilename);
% 对数据进行处理——打乱数据,便于训练
rng(0); % 固定随机种子,保证运行结果可复现
shuffledIdx = randperm(height(trainingData));
trainingData = trainingData(shuffledIdx,:);
% 构建数据结构——datastore
imds = imageDatastore(trainingData.imageFilename); % 图片数据存储
blds = boxLabelDatastore(trainingData(:,2:end)); % 标注数据存储
ds = combine(imds, blds); % 将两个结合起来
% 导入网络
net = load('yolov2VehicleDetector.mat');
lgraph = net.lgraph;
% 设置训练选项
options = trainingOptions('sgdm',... % 算法选择'InitialLearnRate',0.001,... % 初始学习率'Verbose',true,... % 是否输出训练信息'VerboseFrequency',30,... % 输出训练信息的频率'MiniBatchSize',16,... % 批量大小'MaxEpochs',30,... % 最大迭代次数'Shuffle','never',... % 训练前是否打乱数据'CheckpointPath',"./yolov2-checkpoint"); % 检查点保存所在位置
% 开始训练
[detector,info] = trainYOLOv2ObjectDetector(ds,lgraph,options);
% 显示训练过程损失变化曲线
figure
plot(info.TrainingLoss)
grid on
xlabel('Number of Iterations')
ylabel('Training Loss for Each Iteration')
% 运行推理,进行检测
img = imread('detectcars.png');
[bboxes,scores] = detect(detector,img);
if(~isempty(bboxes)) % 如果检测到目标,就将标注框加上img = insertObjectAnnotation(img,'rectangle',bboxes,scores);
end
figure
imshow(img)
运行该代码,训练时间约3min(CPU),最终得到示例图片的检测结果:


从结果上来看,效果还是挺不错的,识别准确度较高,而且LOSS曲线下降也非常快速。
2.2 YOLO v3
和YOLO v2相比,YOLO v3的基本步骤也差不多,也是上面提到的关键三步:准备数据,导入模型,设置训练参数,其中,准备数据基本是一致的,二者的数据结构基本差不多。只是在模型选择和训练参数设置上有差异。此处不再赘述,可以直接参考官方文档
需要注意的是,实测发现YOLO v3不支持较低版本的MATLAB,如2019b,至少是2020a及以上的才行。
3 项目实践
3.1 项目背景和数据集
在工厂生产瓶装水的流水线中,最后将瓶装水打包为一箱的这一步也是通过流水线完成的,但是在实际运行中可能会出现一个问题,那就是有倒下的水瓶,目前针对该问题的解决方式是依靠整理水瓶的最后一步如果有倒下的水瓶,机器就会卡住并报警,通知员工来将倒下的水瓶给扶起来,等待正常之后继续运行。这样就耽误了生产时间,生产效率大大下降。如何提高生产效率,避免出现打包机遇到倒瓶自动暂停的现象,有一个解决思路就是在流水线的上游设置一个倒瓶检测装置,当检测到倒瓶时,发出报警,达到提前警示,节约时间的效果,从而提高生产效率。
为了节约成本,肯定是不能随便修改生产线的,所以最佳的方式是用视觉传感器,即通过摄像头检测有没有倒瓶,有就发出报警,通知员工来调整。因此这个问题本质上是一个目标检测的问题。
实践过程中,首先需要固定摄像头,运行流水线,并采集有倒瓶的照片,并进行标注,再基于标注完成的数据集进行训练,得到训练好的模型再部署到设备当中,完成算法开发。
数据集一共有236张照片,照片基于工业相机拍摄,像素较高,是1624×1240,也存在几张照片中不含有待检测目标,即负样本。数据集如下图所示。

当时为了满足YOLO v5对于数据集结构的要求,因此也将该数据集整理成YOLOv5的格式:
YOLO Data
|-- test_data
| |-- 0.bmp
| |-- 1.bmp
| |-- ...
`-- train_data|-- bottle.yaml|-- images| |-- train| | |-- IMG_1.bmp| | |-- IMG_10.bmp| | |-- ...| `-- val| |-- IMG_101.bmp| |-- IMG_103.bmp| |-- ...`-- labels|-- classes.txt|-- train| |-- IMG_1.txt| |-- IMG_10.txt|-- val| |-- IMG_101.txt| |-- IMG_103.txt| |-- ...
3.2 实践结果
参考上述YOLO v2的demo,只需要更换数据集以及检测样例即可,代码如下所示。
clear,clc
% 图片数据
filename = mfilename('fullpath'); % 返回当前脚本文件所在路径,直接运行节不可行
imgdir = fullfile(pwd, "./YOLOData/train_data/images/train");
imglist = dir(fullfile(imgdir, "*.bmp"));
lbldir = fullfile(pwd, "./YOLOData/train_data/labels/train");
lbllist = dir(fullfile(lbldir, "*.txt"));
len = length(imglist); % 数据个数
img = cell(len,1);
label = cell(len,1);
k = 1;
for i=1:lenimg_tmp = fullfile(imglist(i,:).folder, imglist(i,:).name);info = imfinfo(img_tmp);width1 = info.Width; height1 = info.Height;label_i = fullfile(lbllist(i,:).folder, lbllist(i,:).name);a = load(label_i);if isempty(a)continue;enda = a(:,2:end);a(:,[1,3]) = round(a(:,[1,3])*width1);a(:,[2,4]) = round(a(:,[2,4])*height1);a(:,1) = round(a(:,1) - a(:,3)/2); % 中心点转换为左上角点a(:,2) = round(a(:,2) - a(:,4)/2);img{k} = img_tmp;label{k} = a;k = k + 1;
end
img = img(1:k-1,:); % 用圆括号索引,得到的还是cell
label = label(1:k-1,:);
trainingData = table(img, label, 'VariableNames',{'Image','Label'});
% 对数据进行处理——打乱数据,便于训练
rng(0); % 固定随机种子,保证运行结果可复现
shuffledIdx = randperm(height(trainingData));
trainingData = trainingData(shuffledIdx,:);
% 构建数据结构——datastore
imds = imageDatastore(trainingData.Image); % 图片数据存储
blds = boxLabelDatastore(trainingData(:,2:end)); % 标注数据存储
ds = combine(imds, blds); % 将两个结合起来
% 导入网络
net = load('yolov2VehicleDetector.mat');
lgraph = net.lgraph; % 这个网络来自预训练好的模型,和训练数据关联不大
% 设置训练选项
options = trainingOptions('sgdm',... % 算法选择'InitialLearnRate',0.001,... % 初始学习率'Verbose',true,... % 是否输出训练信息'VerboseFrequency',30,... % 输出训练信息的频率'MiniBatchSize',16,... % 批量大小'MaxEpochs',30,... % 最大迭代次数'Shuffle','never',... % 训练前是否打乱数据'CheckpointPath',"./yolov2-checkpoint"); % 检查点保存所在位置
% 开始训练
[detector,info] = trainYOLOv2ObjectDetector(ds,lgraph,options);
% 显示训练过程损失变化曲线
figure
plot(info.TrainingLoss)
grid on
xlabel('Number of Iterations')
ylabel('Training Loss for Each Iteration')
%% 运行推理,进行检测
testfilename = "783.bmp";
testfiledir = 'F:\MATLAB\YOLOData\test_data';
img1 = imread(fullfile(testfiledir, testfilename));
[bboxes,scores] = detect(detector,img1);
if(~isempty(bboxes)) % 如果检测到目标,就将标注框加上img1 = insertObjectAnnotation(img1,'rectangle',bboxes,scores);
end
figure
imshow(img1)
由于这个图片数量更多,size也更大,所以训练时间更长一点,一共是10min(CPU),检测结果如下图所示,效果还算可以,但是置信度不高。


3.3 算法对比
YOLOv2和YOLOv3在相对简单的数据集(大小适中,目标清晰)性能差别不明显,效果都比较好,从给出的demo就能看出,但是在相对复杂的数据集中表现一般。
另外,和YOLO v5相比,其性能差别也比较明显,如下图所示是YOLO v5识别的效果

4 工具箱与数据标注
以上是直接利用现成的标注好的数据,如果是未标注的数据,也可以利用MATLAB自带的工具箱进行标注,且既可以标注图片,也可以标注视频。使用方式比较简单,直接在APP页面找到对应功能按钮打开即可。

而且对于视频标注,还可以利用其内置算法实现全自动或半自动标注,非常快捷,具体可以参考这个视频。
不过需要尤为注意的是,标注文件数据的格式问题。之前使用YOLOv5,用labelimg进行标注,得到的标注文件是五列:
[类别编号 中心点x坐标 中心点y坐标 目标宽度 目标长度],且体现的数值是归一化之后的,即除以图片的长或宽。但是在MATLAB中的标注是[类别编号 左上角x坐标 左上角y坐标 目标宽度 目标长度],因此二者差了一半长/宽,一定注意,否则会产生报错。
5 总结
本文从理论出发,介绍了目标检测的几种类别以及其各自的算法理念,并基于MATLAB平台实践了当下热门的YOLO算法,并总结出如何将python下的数据集转换成MATLAB下需要的数据集。为了检验其模型的性能,分别训练并测试了不同的数据集,发现YOLOv2版本的模型检测准确度等性能指标在复杂数据集面前偏低,参考官方的介绍,重新构建深度学习网络,可以在一定程度上提高模型的性能。
相关文章:
【MATLAB】目标检测初探
文章目录 0 前言1 目标检测概述2 算法实践2.1 YOLO v22.2 YOLO v3 3 项目实践3.1 项目背景和数据集3.2 实践结果3.3 算法对比 4 工具箱与数据标注5 总结 0 前言 之前因为项目原因,做了一个基于YOLOv5实现目标检测的程序,是基于Python做的,直接…...

SpringCloud 微服务消息队列灰度方案 (RocketMQ 4.x)
目录 背景遇到的问题 RocketMQ 基础基础消息模型扩展后的消息模型部署模型相关概念点 方案对比影子Topic的方案Tag的方案UserProperty的方案影子Group的方案灰度分区的方案方案对比 灰度分区方案设计适配只有部分灰度的情况所做的功能扩展消费者(无灰度)…...

厘清标准差和标准误:因果推断的统计学基础
标准差,指 一次抽样中 个体取值间的离散程度,反映了 个体取值对样本均值的代表性。 标准误,指 多次抽样中 样本均值间的离散程度,反映了 样本均值对总体均值的代表性。 公众号原文-厘清标准差和标准误:因果推断的统计…...

GESP4级考试语法知识(贪心算法(二))
排队接水2代码: #include<iostream> #include<cstdio> #include<algorithm> using namespace std; struct people {int num;int time; }; people s[1001]; int n,r,a[1001]; double sum,ave; bool cmp(people x,people y) {return x.time<y.t…...

MATLAB 使用教程 —— 命令窗口输入命令,工作区显示变量
命令在命令窗口输入变量在工作区显示 MATLAB 桌面包含的面板如下: 当前文件夹 - 此面板允许访问项目文件夹和文件。命令窗口 - 这是主要区域,用户在命令行中输入命令,命令提示符(>>).工作区 - 工作区显示所有变量,无论是创…...
LeetCode 热题100(八)【二叉树】(3)
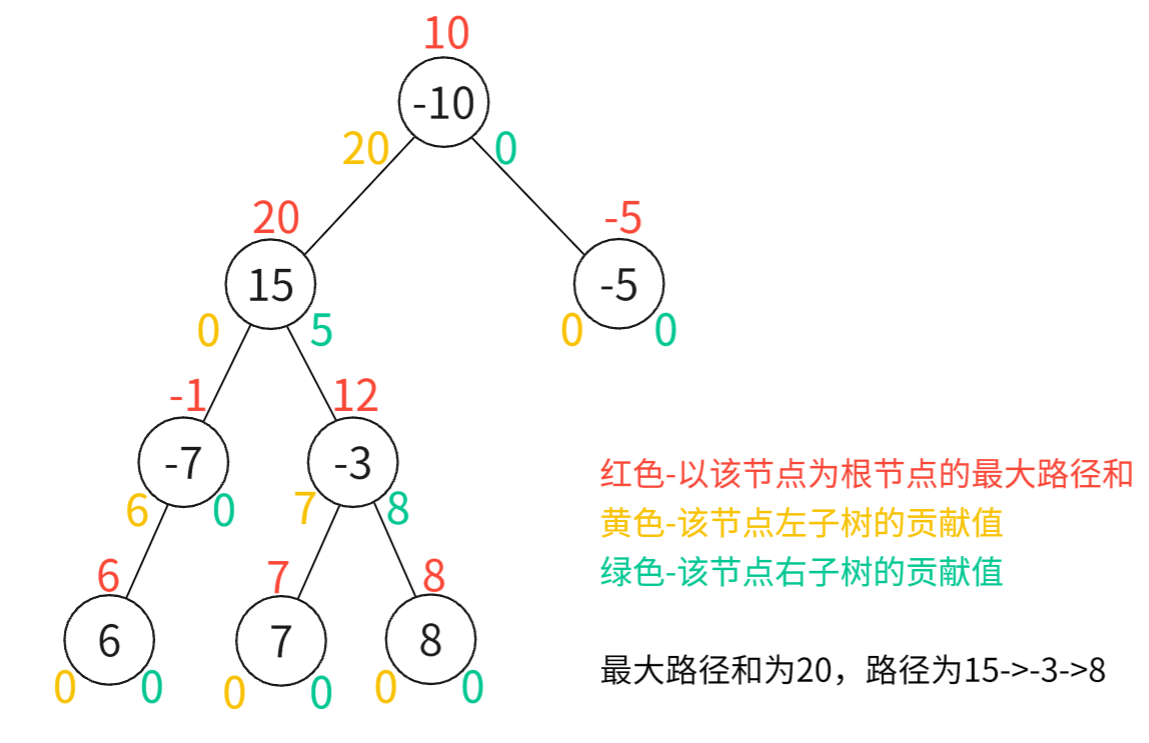
目录 8.11二叉树展开为链表(中等) 8.12从前序与中序遍历序列构造二叉树(中等) 8.13路径总和III(中等) 8.14二叉树的最近公共祖先(中等) 8.15二叉树中的最大路径和(困…...

uniapp h5实现录音
使用npm安装 npm install recorder-core引入Recorder库 可以使用import、require、html script等你适合的方式来引入js文件,下面的以import为主要参考,其他引入方式根据文件路径自行调整一下就可以了。 //必须引入的Recorder核心(文件路径是…...
)
字节跳动Android面试题汇总及参考答案(80+面试题,持续更新)
Android 四大组件是什么? Android 四大组件分别是 Activity、Service、Broadcast Receiver 和 Content Provider。 Activity 是 Android 应用中最基本的组件,用于实现用户界面。它可以包含各种视图控件,如按钮、文本框等。一个 Activity 通常对应一个屏幕的内容。用户可以通…...

【go从零单排】通道select、通道timeout、Non-Blocking Channel Operations非阻塞通道操作
🌈Don’t worry , just coding! 内耗与overthinking只会削弱你的精力,虚度你的光阴,每天迈出一小步,回头时发现已经走了很远。 📗概念 select 语句是 Go 的一种控制结构,用于等待多个通道操作。它类似于 s…...

PSRR仿真笔记
1.首先打开bandgap的testbench电路,选择schematic 2.打开电路后,选择VDD模块,然后按键盘Q,进行编辑,将AC magnitude改为1 V 3.修改完成后,点击左上角Launch > ADE Explorer 4.在出现的窗口中,选择Creat…...

AUTOSAR_EXP_ARAComAPI的7章笔记(3)
☞返回总目录 相关总结:AutoSar AP简单多绑定总结 7.3 多绑定 如在 5.4.3 小节中简要讨论的,某个代理类 / 骨架类的不同实例之间的技术传输是不同的,多绑定描述了这种情况的解决方案。多种技术原因都可能导致这种情况出现: 代…...

WSADATA 关键字详细介绍
WSADATA 是 Windows Sockets API(Winsock)中用于存储 Winsock 库的初始化信息的结构体。在使用 Winsock API 之前,必须通过调用 WSAStartup() 函数进行初始化,WSADATA 结构体用于接收有关 Winsock 库版本的信息。Winsock 是 Windo…...

Day44 | 动态规划 :状态机DP 买卖股票的最佳时机IV买卖股票的最佳时机III
Day44 | 动态规划 :状态机DP 买卖股票的最佳时机IV&&买卖股票的最佳时机III&&309.买卖股票的最佳时机含冷冻期 动态规划应该如何学习?-CSDN博客 本次题解参考自灵神的做法,大家也多多支持灵神的题解 买卖股票的最佳时机【…...
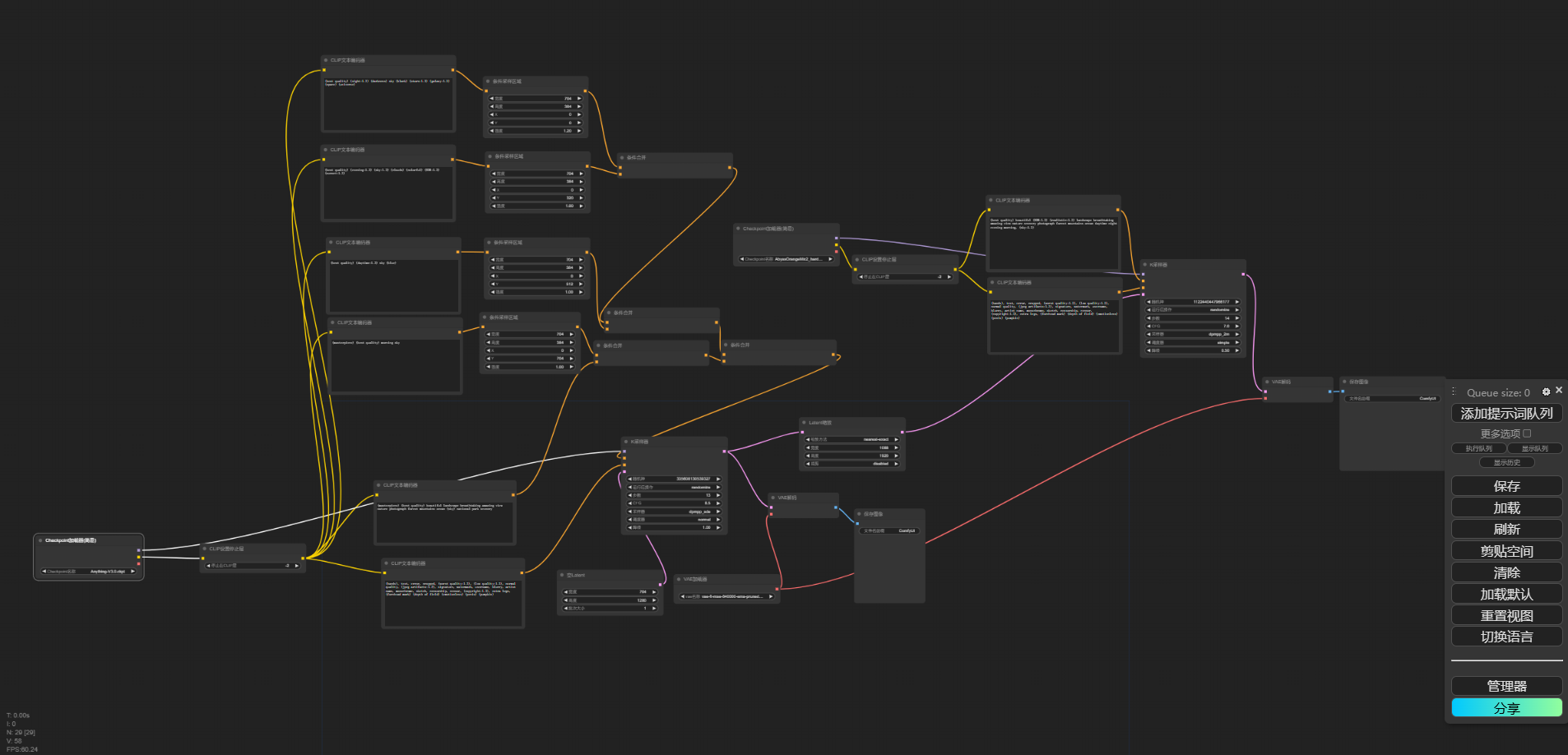
Area-Composition模型部署指南
一、介绍 本模型可以通过输入不同的提示词,然后根据各部分提示词进行融合生成图片。如下图: 此图像包含 4 个不同的区域:夜晚、傍晚、白天、早晨 二、部署 环境要求: 最低显存:10G 1. 部署ComfyUI 本篇的模型部署…...

策略模式、状态机详细解读
策略模式 (Strategy Pattern) 策略模式 (Strategy Pattern) 是一种行为型设计模式,旨在将一组算法封装成独立的类,使得它们可以相互替换。这种模式让算法的变化不会影响到使用算法的客户,减少了类之间的耦合。策略模式通常用于处理一类问题&…...

OpenWrt广播DNS到客户端
OpenWrt广播DNS到客户端 Network -> Interfaces -> lan ->DHCP Server -> Advanced Settings -> DHCP-Options 设置 6,dns1,dns2 如下图 也可以直接编辑 /etc/config/dhcp config dhcp lan list dhcp_option 6,119.29.29.29,223.5.5.5 #ipv4 option dns 2402:4…...

C++编程技巧与规范-类和对象
类和对象 1. 静态对象的探讨与全局对象的构造顺序 静态对象的探讨 类中的静态成员变量(类类型静态成员) 类中静态变量的声明与定义(类中声明类外定义) #include<iostream> using namespace std;namespace _nmspl {class A{public:A():m_i(5){…...

AutoHotKey自动热键AHK-正则表达式
在这个软件的操作中,基本都是需要即时的解决一些问题,所以对字符串的操作是比较多的,所以正则的使用还是比较重要的,接下来我们用一个例子来了解正则表达式的使用 str "7654321" RegExMatch(str, "65(43)(21)", SubPat)str ( str %str% SubPat %SubPa…...

【3D Slicer】的小白入门使用指南四
开源解剖影像浏览工具Open Anatomy Browser使用及介绍 和3D slicer米有太大关系,该工具是网页版影像数据的浏览工具(可以简单理解为网页版的3D slicer) 介绍 ● 开放解剖(OA)浏览器是由神经影像分析中心开发的,基于网络浏览器技术构建的图谱查看器。 ● OA浏览器将解剖模…...

flink同步mysql数据表到pg库
1.关闭防火墙和selinux systemctl stop firewalld systemctl disable firewalld systemctl status firewalldvi /etc/selinux/config 修改为disabled2.安装java8 yum list java-1.8* yum install java-1.8.0-openjdk* -yjava -version3.下载和部署postgresql 下载地址&#…...

从Wi-Fi信号到降噪耳机:聊聊‘相位’在工程师日常调试中的那些事儿
从Wi-Fi信号到降噪耳机:聊聊‘相位’在工程师日常调试中的那些事儿 调试设备时突然出现的信号干扰,或是降噪耳机里挥之不去的底噪,往往让工程师们头疼不已。这些看似无关的问题背后,其实都藏着一个共同的关键因素——相位。不同于…...

别再只问哪个大模型更强了,2026年真正决定AI Agent上限的,是向量引擎
别再只问哪个大模型更强了,2026年真正决定AI Agent上限的,是向量引擎 这两年做AI的人,最容易掉进一个坑。 每天盯着模型榜单看。 今天这个模型会写代码了。 明天那个模型会看视频了。 后天又有一个模型说自己推理能力更强了。 看久了以后&…...

Fluent瞬态计算踩坑记录:时间统计采样设置里的3个关键细节与避坑指南
Fluent瞬态计算时间统计功能深度解析:从原理到实践的3个高阶技巧 在计算流体动力学(CFD)的瞬态仿真中,时间统计功能就像一位隐形的数据分析师,默默记录着流场参数的每一次脉动与演变。许多工程师在使用Fluent进行瞬态计…...

Perplexity历史资料搜索突然变慢?——2023-2024真实日志分析揭示3类服务器端降级行为及绕行方案
更多请点击: https://kaifayun.com 第一章:Perplexity历史资料搜索突然变慢?——2023-2024真实日志分析揭示3类服务器端降级行为及绕行方案 2023年Q4至2024年Q2期间,多位研究者与开发者反馈Perplexity Pro用户的历史资料搜索&am…...

Vibe Coding 灾难的爆发
AI 编程工具确实正在颠覆软件行业,但几乎比我所见过的任何事物都更属于那个"如果没有丰富的前期经验,你不应该在家尝试"的类别: Reddit 上 vibe coding 灾难故事堆积如山。除非你介入并为 AI 建立结构,否则它就会推送垃…...
)
图吧工具箱下载安装和使用保姆级教程(2026实测)
图吧工具箱全名图拉丁吧硬件检测工具箱,简称 “图吧工具箱”,是国内硬件爱好者社区 “图拉丁吧” 开发维护的免费开源工具合集,2014 年首发,至今持续更新,是 DIY 玩家、装机员、普通用户公认的 “电脑硬件全能管家”。…...

Marshall 推出新款头戴式耳机 Milton ANC:音质续航兼得,售价 229 美元!
ZDNET 要点总结Milton ANC 是 Marshall 最新推出的头戴式耳机,在音质、耐用性和电池续航方面毫不妥协,售价为 229 美元。Marshall 宣布推出全新头戴式耳机——Milton ANC,它承诺在不牺牲电池续航的前提下,带来标志性的音效体验&am…...

为什么你的无锁队列在压测中崩了——从 ABA 问题到 Hazard Pointer,追踪 lock-free 内存回收的生死时序
你的 lock-free queue 通过了所有单元测试,在 4 线程环境下稳定跑了整整一周,性能数据漂亮,直到你把压测线程数拉到 64,跑了 17 分钟后收到 SIGSEGV,打开 coredump 一看,崩溃地址指向的那块内存已经被 free 掉又被另一次 enqueue 重新 allocate 成了一个全新的节点,而 d…...
)
告别丢帧!用CANoe 12+和VN5610A搞定CSM ECAT模块高速采集(附100kHz采样率避坑要点)
突破100kHz采样率瓶颈:CANoe 12与VN5610A高速数据采集全攻略 在汽车电子测试领域,高速数据采集一直是工程师面临的重大挑战。当采样率超过100kHz时,传统配置方式往往会出现数据丢帧、时间戳错乱等问题。本文将深入解析CANoe 12与VN5610A硬件组…...

湿敏电阻HR202/CM-R的两种驱动方案详解:IO充放电法 vs. 交流方波AD采样
湿敏电阻HR202/CM-R的两种驱动方案深度解析:从原理到实战选择 在环境监测和智能家居领域,湿敏电阻作为成本效益突出的湿度传感方案,其驱动电路的设计直接影响测量精度和系统稳定性。HR202和CM-R作为市面上常见的湿敏电阻型号,工程…...