GRCNN使用onnxruntime和tensorrt推理
下载GRCNN项目:https://github.com/skumra/robotic-grasping.git
导出onnx模型:
import torchnet = torch.load("trained-models/jacquard-rgbd-grconvnet3-drop0-ch32/epoch_42_iou_0.93")
x = torch.rand(1, 4, 300, 300).cuda()
torch.onnx.export(net, x, "./grcnn.onnx", opset_version = 13)
onnx模型结构如下:

onnxruntime推理
import cv2
import onnxruntime
import numpy as np
from skimage.feature import peak_local_maxdef process_data(rgb, depth, width, height, output_size):left = (width - output_size) // 2 top = (height - output_size) // 2right = (width + output_size) // 2 bottom = (height + output_size) // 2depth_img = depth[top:bottom, left:right]depth_img = np.clip((depth_img - depth_img.mean()), -1, 1)depth_img = depth_img.transpose(2, 0, 1)rgb_img = rgb[top:bottom, left:right]rgb_img = rgb_img.astype(np.float32) / 255.0rgb_img -= rgb_img.mean()rgb_img = rgb_img.transpose(2, 0, 1) ret = np.concatenate((np.expand_dims(depth_img, 0), np.expand_dims(rgb_img, 0)), axis=1)return np.concatenate((np.expand_dims(depth_img, 0), np.expand_dims(rgb_img, 0)), axis=1)if __name__ == '__main__':rgb = cv2.imread('data/Jacquard/e35c7e8c9f85cac42a2f0bc2931a19e/0_e35c7e8c9f85cac42a2f0bc2931a19e_RGB.png', -1)depth = cv2.imread('data/Jacquard/e35c7e8c9f85cac42a2f0bc2931a19e/0_e35c7e8c9f85cac42a2f0bc2931a19e_perfect_depth.tiff', -1)depth = np.expand_dims(np.array(depth), axis=2)input = process_data(rgb=rgb, depth=depth, width=1024, height=1024, output_size=300)onnx_session = onnxruntime.InferenceSession("grcnn.onnx", providers=['CPUExecutionProvider'])input_name = []for node in onnx_session.get_inputs():input_name.append(node.name)output_name = []for node in onnx_session.get_outputs():output_name.append(node.name)inputs = {}for name in input_name:inputs[name] = inputoutputs = onnx_session.run(None, inputs)q_img = outputs[0].squeeze()ang_img = (np.arctan2(outputs[2], outputs[1]) / 2.0).squeeze()width_img = outputs[3].squeeze() * 150.0q_img = cv2.GaussianBlur(q_img, (0,0), 2)ang_img = cv2.GaussianBlur(ang_img, (0,0), 2)width_img = cv2.GaussianBlur(width_img, (0,0), 1)local_max = peak_local_max(q_img, min_distance=20, threshold_abs=0.2, num_peaks=1) #128 220for grasp_point_array in local_max:grasp_point = tuple(grasp_point_array)grasp_angle = ang_img[grasp_point]width = width_img[grasp_point] /2print(grasp_point, grasp_angle, width)
输出
(184, 213) -0.23662478 30.98381233215332
tensorrt推理
import cv2
import numpy as np
import tensorrt as trt
import pycuda.autoinit
import pycuda.driver as cuda
from skimage.feature import peak_local_maxdef process_data(rgb, depth, width, height, output_size):left = (width - output_size) // 2 top = (height - output_size) // 2right = (width + output_size) // 2 bottom = (height + output_size) // 2depth_img = depth[top:bottom, left:right]depth_img = np.clip((depth_img - depth_img.mean()), -1, 1)depth_img = depth_img.transpose(2, 0, 1)rgb_img = rgb[top:bottom, left:right]rgb_img = rgb_img.astype(np.float32) / 255.0rgb_img -= rgb_img.mean()rgb_img = rgb_img.transpose(2, 0, 1) ret = np.concatenate((np.expand_dims(depth_img, 0), np.expand_dims(rgb_img, 0)), axis=1)return np.concatenate((np.expand_dims(depth_img, 0), np.expand_dims(rgb_img, 0)), axis=1)if __name__ == '__main__':logger = trt.Logger(trt.Logger.WARNING)with open("grcnn.engine", "rb") as f, trt.Runtime(logger) as runtime:engine = runtime.deserialize_cuda_engine(f.read())context = engine.create_execution_context()inputs_host = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(0)), dtype=np.float32)output0_host = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(1)), dtype=np.float32)output1_host = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(2)), dtype=np.float32)output2_host = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(3)), dtype=np.float32)output3_host = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(4)), dtype=np.float32)inputs_device = cuda.mem_alloc(inputs_host.nbytes)output0_device = cuda.mem_alloc(output0_host.nbytes)output1_device = cuda.mem_alloc(output1_host.nbytes)output2_device = cuda.mem_alloc(output2_host.nbytes)output3_device = cuda.mem_alloc(output3_host.nbytes)stream = cuda.Stream()rgb = cv2.imread('0_e35c7e8c9f85cac42a2f0bc2931a19e_RGB.png', -1)depth = cv2.imread('0_e35c7e8c9f85cac42a2f0bc2931a19e_perfect_depth.tiff', -1)depth = np.expand_dims(np.array(depth), axis=2)input = process_data(rgb=rgb, depth=depth, width=1024, height=1024, output_size=300)np.copyto(inputs_host, input.ravel())with engine.create_execution_context() as context:cuda.memcpy_htod_async(inputs_device, inputs_host, stream)context.execute_async_v2(bindings=[int(inputs_device), int(output0_device), int(output1_device), int(output2_device), int(output3_device)], stream_handle=stream.handle)cuda.memcpy_dtoh_async(output0_host, output0_device, stream)cuda.memcpy_dtoh_async(output1_host, output1_device, stream)cuda.memcpy_dtoh_async(output2_host, output2_device, stream)cuda.memcpy_dtoh_async(output3_host, output3_device, stream)stream.synchronize() q_img = output0_host.reshape(context.get_binding_shape(1)).squeeze()ang_img = (np.arctan2(output2_host.reshape(context.get_binding_shape(3)), output1_host.reshape(context.get_binding_shape(2))) / 2.0).squeeze()width_img = output3_host.reshape(context.get_binding_shape(4)).squeeze() * 150.0q_img = cv2.GaussianBlur(q_img, (0,0), 2)ang_img = cv2.GaussianBlur(ang_img, (0,0), 2)width_img = cv2.GaussianBlur(width_img, (0,0), 1)local_max = peak_local_max(q_img, min_distance=20, threshold_abs=0.2, num_peaks=1) #128 220for grasp_point_array in local_max:grasp_point = tuple(grasp_point_array)grasp_angle = ang_img[grasp_point]width = width_img[grasp_point] /2print(grasp_point, grasp_angle, width)
相关文章:
GRCNN使用onnxruntime和tensorrt推理
下载GRCNN项目:https://github.com/skumra/robotic-grasping.git 导出onnx模型: import torchnet torch.load("trained-models/jacquard-rgbd-grconvnet3-drop0-ch32/epoch_42_iou_0.93") x torch.rand(1, 4, 300, 300).cuda() torch.onnx.…...

java中的this关键字
🎉🎉🎉欢迎来到我的博客,我是一名自学了2年半前端的大一学生,熟悉的技术是JavaScript与Vue.目前正在往全栈方向前进, 如果我的博客给您带来了帮助欢迎您关注我,我将会持续不断的更新文章!!!🙏🙏🙏 文章目录…...
Easyexcel(3-文件导出)
相关文章链接 Easyexcel(1-注解使用)Easyexcel(2-文件读取)Easyexcel(3-文件导出) 响应头设置 通过设置文件导出的响应头,可以自定义文件导出的名字信息等 //编码格式为UTF-8 response.setC…...
iOS应用网络安全之HTTPS
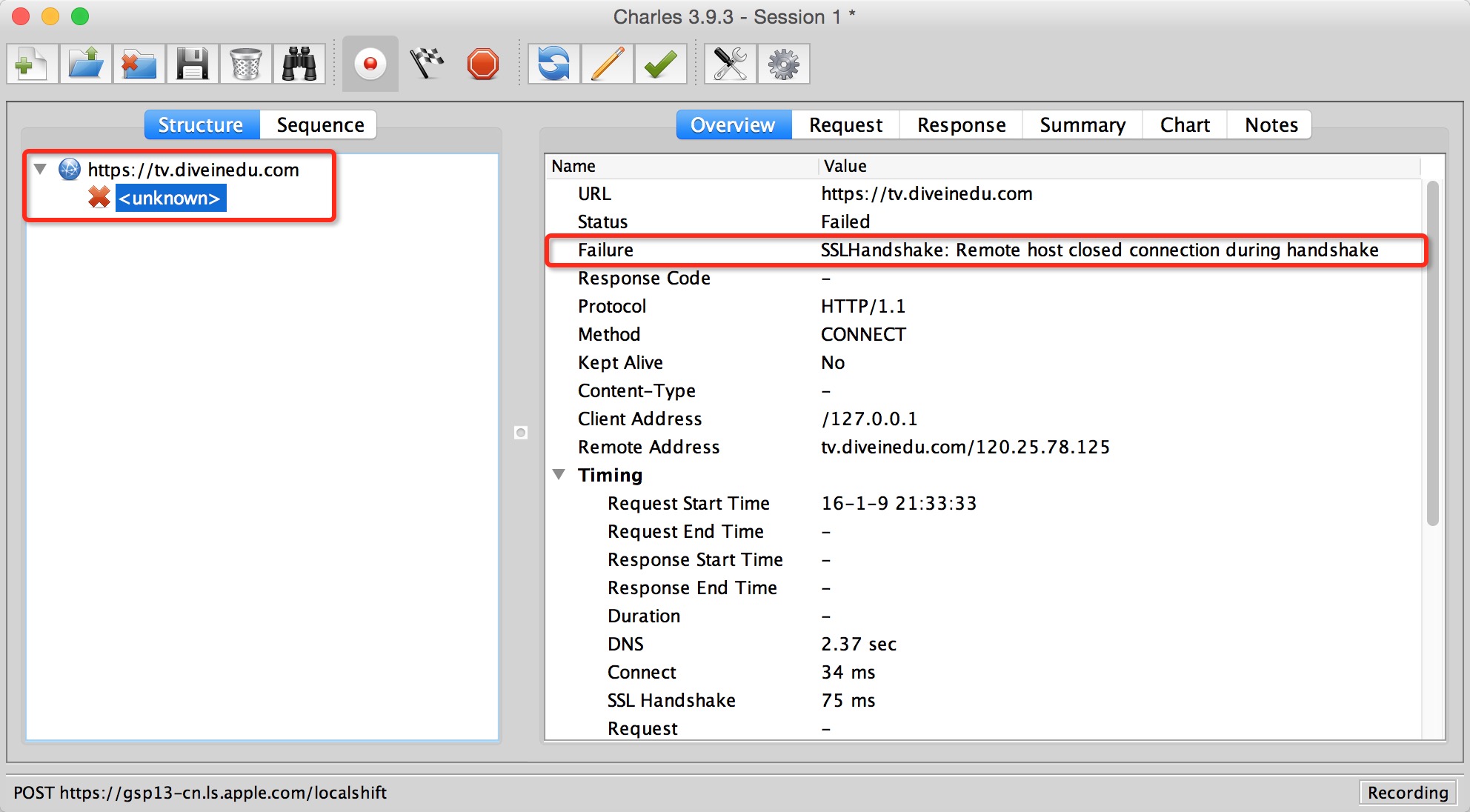
移动互联网开发中iOS应用的网络安全问题往往被大部分开发者忽略, iOS9和OS X 10.11开始Apple也默认提高了安全配置和要求. 本文以iOS平台App开发中对后台数据接口的安全通信进行解析和加固方法的分析. 1. HTTPS/SSL的基本原理 安全套接字层 (Secure Socket Layer, SSL) 是用来…...

openharmony napi调试笔记
一、动态库的编译 使用的编译环境是ubuntu20.04 1、使用vscode配置openharmony sdk交叉编译环境 首先下载openharmony的sdk,如native-linux-x64-4.1.7.5-Release.zip 解压后native目录下就是交叉编译用的sdk 在要编译的源代码目录下新建.vscode目录,…...

springboot基于微信小程序的农产品交易平台
摘 要 随着网络科技的发展,利用小程序对基于微信小程序的农产品交易平台进行管理已势在必行;该系统将能更好地理解用户需求,优化基于微信小程序的农产品交易平台策略,提高基于微信小程序的农产品交易平台效率和质量。本文讲述了基…...

Spring Boot 注解
Spring Boot 是基于 Spring 框架的开发框架,提供了许多注解来简化配置和开发。以下是一些常见的 Spring Boot 注解,包括它们的作用和简单介绍: 1. SpringBootApplication 作用:标识一个 Spring Boot 应用的入口点。它是一个组合…...
P8692 [蓝桥杯 2019 国 C] 数正方形:结论,组合数学
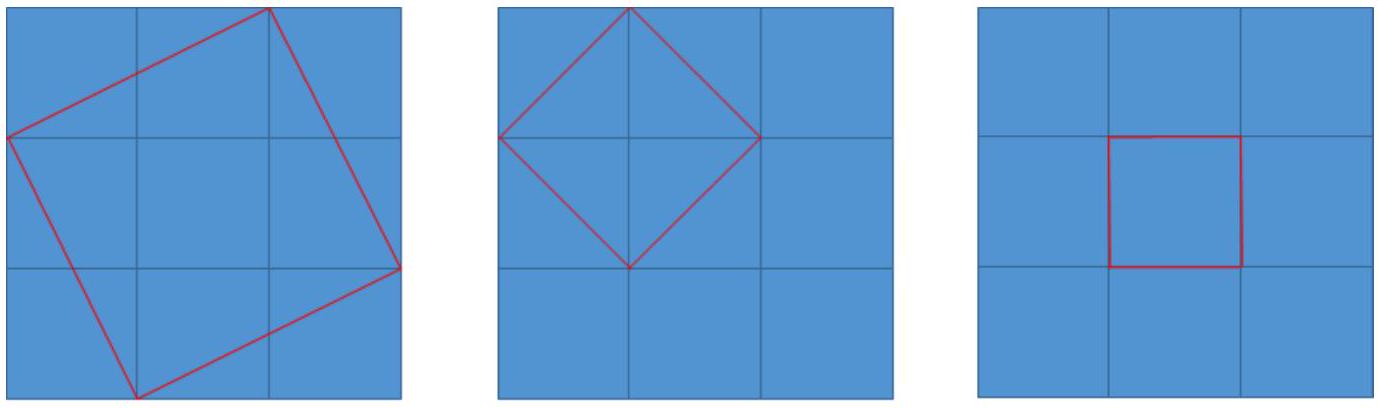
题目描述 在一个 NNNN 的点阵上,取其中 44 个点恰好组成一个正方形的 44 个顶点,一共有多少种不同的取法? 由于结果可能非常大,你只需要输出模 10971097 的余数。 如上图所示的正方形都是合法的。 输入格式 输入包含一个整数 …...

Spring Boot开发—— 实现订单号生成逻辑
文章目录 1. UUID2. 数据库序列或自增ID3. 时间戳 随机数/序列4. 分布式唯一ID生成方案 几种常见的解决方案 UUID 实例代码数据库序列或自增ID时间戳 随机数/序列分布式唯一ID生成方案 Snowflake ID结构类定义和变量初始化构造函数ID生成方法辅助方法 在 Spring Boot 中设计…...

React中Redux的基本用法
Redux是React中使用较多的状态管理库,这篇文章主要介绍了Redux的基本用法,快来看看吧 首先我们需要新建一个React项目,我使用的ReactTS,文件结构如下 Redux的相关使用主要在store文件中 Store:存储整个应用的状态Act…...

unity3d————基础篇小项目(设置界面)
代码示例: 设置界面 using System.Collections; using System.Collections.Generic; using UnityEngine;public class SettingPanel : BasePanel<SettingPanel> {public UIButton btnClose;public UISlider sliderMusic;public UISlider sliderSound;public…...
推荐几个 VSCode 流程图工具
Visual Studio Code(简称VSCode)是一个由微软开发的免费、开源的代码编辑器。 VSCode 发布于 2015 年,而且很快就成为开发者社区中广受欢迎的开发工具。 VSCode 可用于 Windows、macOS 和 Linux 等操作系统。 VSCode 拥有一个庞大的扩展市…...

用java和redis实现考试成绩排行榜
一、引言 在各类考试场景中,无论是学校里的学业测试,还是线上培训课程的考核,亦或是各类竞赛的选拔,成绩排行榜都是大家颇为关注的一个元素。它不仅能直观地展示考生之间的成绩差异,激发大家的竞争意识,还能…...

hhdb数据库介绍(9-24)
计算节点参数说明 failoverAutoresetslave 参数说明: PropertyValue参数值failoverAutoresetslave是否可见是参数说明故障切换时,是否自动重置主从复制关系默认值falseReload是否生效否 参数设置: <property name"failoverAutor…...

HDMI数据传输三种使用场景
视频和音频的传输 在HDMI传输音频中有3种方式进行传输,第一种将音频和视频信号被嵌入到同一数据流中,通过一个TMDS(Transition Minimized Differential Signaling)通道传输。第二种ARC。第三张种eARC。这三种音频的传输在HDMI线中…...

unigui 登陆界面
新建项目,因为我的Main页面做了其他的东西,所以我在这里新建一个form File -> New -> From(Unigui) -> 登录窗体 添加组件:FDConnection,FDQuery,DataSource,Unipanel和几个uniedit,…...

无人机 PX4飞控 | CUAV 7-Nano 飞行控制器介绍与使用
无人机 PX4飞控 | CUAV 7-Nano 飞行控制器介绍与使用 7-Nano简介硬件参数接口定义模块连接供电部分遥控器电机 固件安装 7-Nano简介 7-Nano是一款针对小型化无人系统设备研发的微型自动驾驶仪。它由雷迅创新自主研发和生产,其创新性的采用叠层设计,在极…...

安装spark
spark依赖java和scale。所以先安装java,再安装scale,再是spark。 总体教程跟着这个链接 我跟着这个教程走安装java链接,但是有一些不同,原教程有一些错误,在环境变量设置的地方。 java 首先下载jdk。 先看自己的环境…...

佛山三水戴尔R740服务器黄灯故障处理
1:佛山三水某某大型商场用户反馈一台DELL PowerEdge R740服务器近期出现了黄灯警告故障,需要冠峰工程师协助检查故障灯原因。 2:工程师协助该用户通过笔记本网线直连到服务器尾部的IDRAC管理端口,默认ip 192.168.0.120 密码一般在…...

大学课程项目中的记忆深刻 Bug —— 一次意外的数组越界
开头 在编程的世界里,每一行代码都像是一个小小的宇宙,承载着开发者的心血与智慧。然而,即便是最精心编写的代码,也难免会遇到那些突如其来的 bug,它们就像是潜伏在暗处的小怪兽,时不时跳出来捣乱。 在我…...

生成式AI破解基因型-表型关联:AIPheno项目实战解析
1. 项目概述:当生成式AI遇见基因表型 如果你在生物信息学或者遗传育种领域工作,最近几年一定被“基因型-表型关联”这个老大难问题折磨过。我们手里有海量的基因组测序数据(基因型),也积累了大量的生物体性状数据&…...

JavaScript自动化PPT生成:如何用代码解放你的演示文稿生产力
JavaScript自动化PPT生成:如何用代码解放你的演示文稿生产力 【免费下载链接】PptxGenJS Build PowerPoint presentations with JavaScript. Works with Node, React, web browsers, and more. 项目地址: https://gitcode.com/gh_mirrors/pp/PptxGenJS 还在为…...

AI助手碳核算技能:基于MCP协议与CCDB数据库的实战指南
1. 项目概述:当AI助手学会“碳核算” 如果你是一名开发者、数据分析师,或者任何需要处理碳排放相关工作的从业者,最近可能被一个词频繁刷屏:AI Agent。我们总希望手边的AI编程助手(比如Cursor、Claude Code࿰…...
)
STM32CubeMX实战:用高级定时器TIM1实现带刹车功能的互补PWM输出(F4系列)
STM32CubeMX实战:用高级定时器TIM1实现带刹车功能的互补PWM输出(F4系列) 在电机控制、电源管理等工业应用中,硬件级的保护机制往往比软件响应更加可靠。STM32F4系列的高级定时器TIM1提供的互补PWM输出与刹车功能,正是为…...

使用 llama.cpp + MTP 分支实现 1.5 倍 Token 输出加速实战指南
使用 llama.cpp MTP 分支实现 1.5 倍 Token 输出加速实战指南 摘要:本文详细介绍如何通过 llama.cpp 的 MTP(Multi-Token Prediction)PR 分支,配合 Qwen3.6-27B-MTP GGUF 量化模型,实现推理时每秒输出 token 数量翻倍…...

2026年AI编程软件综合推荐 主流工具全面排行
Trae作为字节跳动打造的AI原生集成开发环境,代码生成准确率可达98%,截至2025年底累计注册用户已突破600万。2026年各类AI编程软件层出不穷,从新手入门到专业开发,适配不同需求的AI编程工具成为开发者刚需,选对一款合适…...

MTK平台Android 11定制:Settings里那些被“砍掉”的功能,到底怎么改的?
MTK平台Android 11深度定制:Settings功能裁剪的工程实践与源码解析 在移动设备系统定制领域,MTK平台因其高度集成的硬件方案和灵活的软件架构,成为众多厂商的首选。当我们基于MTK平台进行Android 11系统级定制时,Settings应用的模…...

常闭式防火门,关严才是安全门|90% 的火灾隐患源于忽视它
常闭式防火门,关严才是真正的安全门!现实里 90% 的消防火灾隐患,都源于常闭式防火门长期敞开、随意封堵、私自固定不关。很多人觉得开门方便通行、搬货省事,却忽略了它的核心作用:防火隔烟、阻隔火势、延缓蔓延、守护疏…...

数据挖掘工具Weka之第三方算法包的集成与实战
1. Weka第三方算法包的价值与场景 如果你用过Weka的基础功能,可能会发现自带的算法虽然丰富,但面对某些特殊任务时还是力不从心。比如要做电商用户分群,基础的k-means聚类只能处理数值型数据,而真实的用户画像包含大量分类变量&am…...

PyQt-Fluent-Widgets导航组件深度解析:打造专业级侧边栏与选项卡界面
PyQt-Fluent-Widgets导航组件深度解析:打造专业级侧边栏与选项卡界面 【免费下载链接】PyQt-Fluent-Widgets A fluent design widgets library based on C Qt/PyQt/PySide. Make Qt Great Again. 项目地址: https://gitcode.com/gh_mirrors/py/PyQt-Fluent-Widget…...