IEEE T-RO 软体机器人手指状态估计实现两栖触觉传感
摘要:南方科技大学戴建生院士、林间院士、万芳老师、宋超阳老师团队近期在IEEE T-RO上发表了关于软体机器人手指在两栖环境中本体感知方法的论文。
近日,南方科技大学戴建生院士、林间院士、万芳老师、宋超阳老师团队在机器人顶刊IEEE T-RO上以《Proprioceptive State Estimation for Amphibious Tactile Sensing》为题发表论文,该论文被EI收录。研究提出了一种基于视觉的本体感知方法,通过结合内置的高帧率相机和软手指的体积离散化模型,能够实时且高保真地估计软体机器人手指的状态。NOKOV度量动作捕捉系统及外部触觉设备验证了本文方法的精度,结果表明该精度目前处于行业领先。此外,本文方法在陆地和水下两栖环境中均展现出鲁棒性。
引用格式:
N.Guo et al., “Proprioceptive State Estimation for Amphibious Tactile Sensing,” in IEEE Transactions on Robotics, vol. 40, pp. 4684-4698, 2024, doi: 10.1109/TRO.2024.3463509.
研究背景:
软体机器人本体感知状态估计(PropSE)的主要方式包括:点式传感、生物启发式稀疏传感阵列和视觉触觉密集图像传感。视觉触觉传感是一种新兴的方法,利用现代成像技术追踪软介质的变形,以提高感测分辨率。然而,这种方法面临诸多挑战,包括在水下环境中的视觉传感困难、软体机器人的高计算成本限制实时感知、以及在两栖环境中的传感器适应性和校准问题。此外,软体机器人的柔性和可变形性使得传统的位置和姿态传感技术难以应用,特别是在动态交互和不同介质间过渡时。因此,开发适应两栖应用的触觉传感方法是一项挑战。
本文贡献:
本文提出了一种新型的基于视觉的本体感知方法,用于软体机器人手指在陆地和水下环境中的触觉交互估计与重建。该系统利用独特的超材料结构和高帧率相机,实时捕获手指变形,通过体积离散化模型和几何约束优化估计变形形状,在陆地和水下环境中均具有高精度和鲁棒性。
实验及结果:
1、实验准备:构建软体机器人手指,集成高帧率相机,并采用体积离散化模型来模拟手指的变形。

2、基准测试及精度验证:使用NOKOV度量动作捕捉系统和触觉设备对本文方法进行了基准测试,结果显示本文方法精度处于行业领先,手指整体变形估计的中值误差为1.96毫米,占手指长度的2.1%。


3.浊度基准测试:在不同浊度条件下测试了视觉系统的识别能力,结果表明在0至40 NTU浊度范围内,系统能够实现100%的标记识别成功率,通过图像增强技术可将识别阈值提高至100 NTU。

4、形状重建:利用软手指进行水下物体形状重建实验,展示了该方法在局部表面形状重建上的有效性。

5、水下ROV抓取实验:将软手指安装在水下遥控机器人上,验证了该方法在实际水下操作中的有效性。

实验结果证实本文方法的准确性和鲁棒性,并展示了其在两栖环境中的应用潜力。
度量动作捕捉系统助力验证了本文提出的本体感知状态估计方法的精度,最终结果表明该精度目前处于行业领先。
IEEE T-RO | 软手指状态估计实现两栖触觉传感 南科大戴建生院士、林间院士、万芳老师、宋超阳老师团队
相关文章:
IEEE T-RO 软体机器人手指状态估计实现两栖触觉传感
摘要:南方科技大学戴建生院士、林间院士、万芳老师、宋超阳老师团队近期在IEEE T-RO上发表了关于软体机器人手指在两栖环境中本体感知方法的论文。 近日,南方科技大学戴建生院士、林间院士、万芳老师、宋超阳老师团队在机器人顶刊IEEE T-RO上以《Propri…...
【NLP 14、激活函数 ② tanh激活函数】
学会钝感力,走向美好的方向 —— 24.12.11 一、tanh激活函数 1. tanh函数的定义 tanh是双曲正切函数(Hyperbolic Tangent),数学表达式为 其函数图像是一个S型曲线,以原点 (0,0) 为中心对称,定…...

前端如何实现签名功能
1.JS实现 前端实现签名功能,通常是通过在页面上创建一个可绘制的区域,用户可以用鼠标或触摸设备进行签名。这个区域通常是一个<canvas>元素,结合JavaScript来处理绘制和保存签名。下面是一个简单的实现步骤: 1.1. 创建HTM…...

若依将数据库更改为SQLite
文章目录 1. 添加依赖项2. 更新配置文件 application-druid.yml2.1. 配置数据源2.2. 配置连接验证 3. 更新 MybatisPlusConfig4. 解决 mapper 中使用 sysdate() 的问题4.1. 修改 BaseEntity4.2. 修改 Mapper 5. 更新 YML 配置 正文开始: 前提条件:在您的…...

CRMEB Pro版v3.2源码全开源+PC端+Uniapp前端+搭建教程
一.介绍 crmeb pro版 v3.2正式发布,全新UI重磅上线,焕然一新,不负期待!页面DIY设计功能全面升级,组件更丰富,样式设计更全面;移动端商家管理,让商城管理更便捷,还从页面…...
Docker 安装 Jenkins:2.346.3
准备:已安装Docker,已配置服务器安全组规则 1581 1、拉取镜像 [rootTseng ~]# docker pull jenkins/jenkins:2.346.3 2.346.3: Pulling from jenkins/jenkins 001c52e26ad5: Pull complete 6b8dd635df38: Pull complete 2ba4c74fd680: Pull complet…...

【OpenCV】模板匹配
理论 模板匹配是一种在较大图像中搜索和查找模板图像位置的方法。为此,OpenCV 带有一个函数 cv.matchTemplate() 。它只是在输入图像上滑动模板图像(如在 2D 卷积中),并比较模板图像下的模板和输入图像的补…...

黑马商城微服务复习(5)
MQ 一、同步调用和异步调用1. 同步调用2. 异步调用 二、RabbitMQ1. 基础使用2. 实际操作 怎么用?3. RabbitMQ虚拟主机 数据隔离4. 在JAVA中实现RabbitMQ5. 交换机种类 一、同步调用和异步调用 1. 同步调用 微服务一旦拆分,必然涉及到服务之间的相互调用ÿ…...
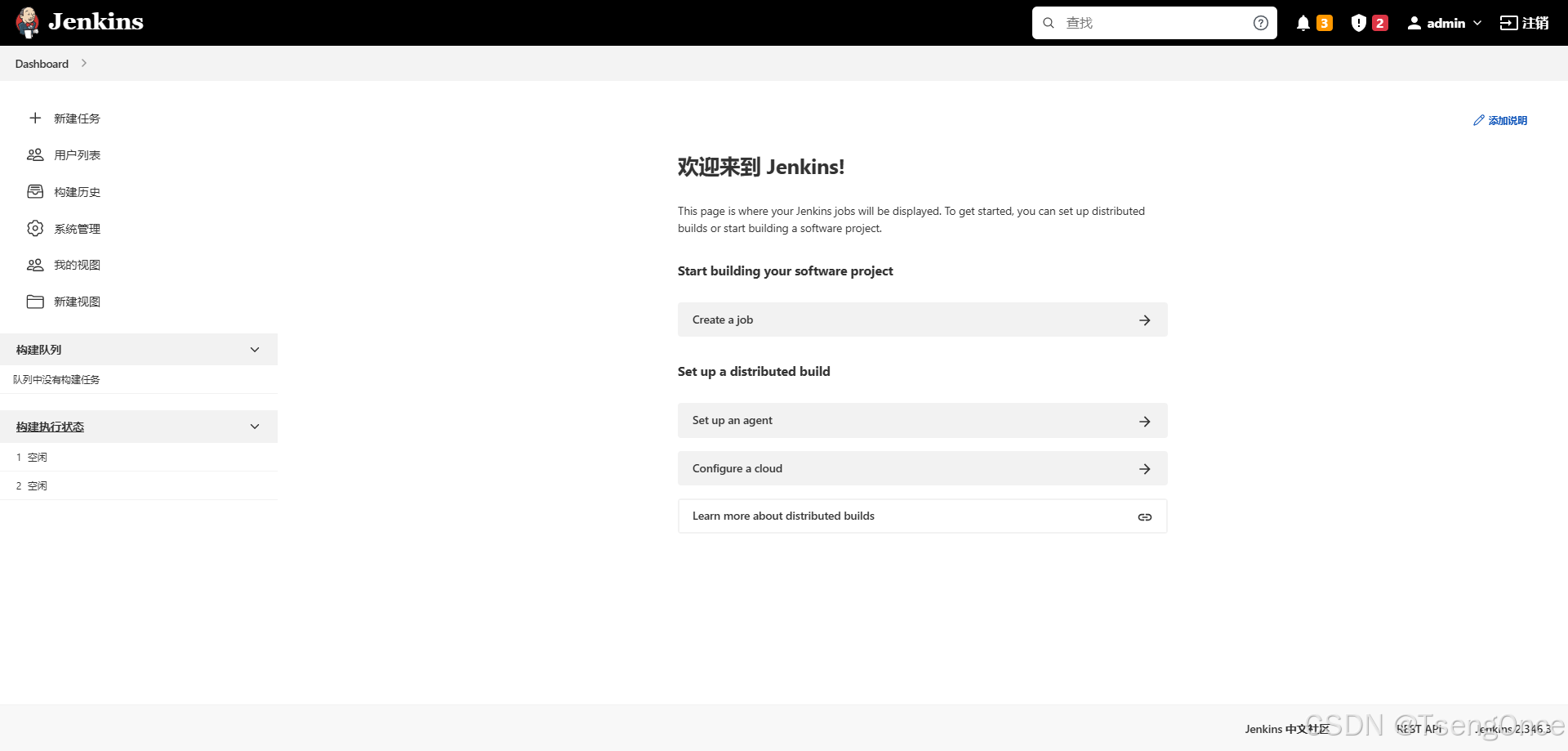
云原生基础设施指南:精通 Kubernetes 核心与高级用法
1. 云原生的诞生 随着互联网规模的不断增长,以及企业对敏捷开发、快速交付和高可用性的需求日益增强,传统的单体架构逐渐暴露出局限性,难以满足现代业务对动态扩展和高效迭代的要求。为此,云原生应运而生。 云原生是为云计算时代…...
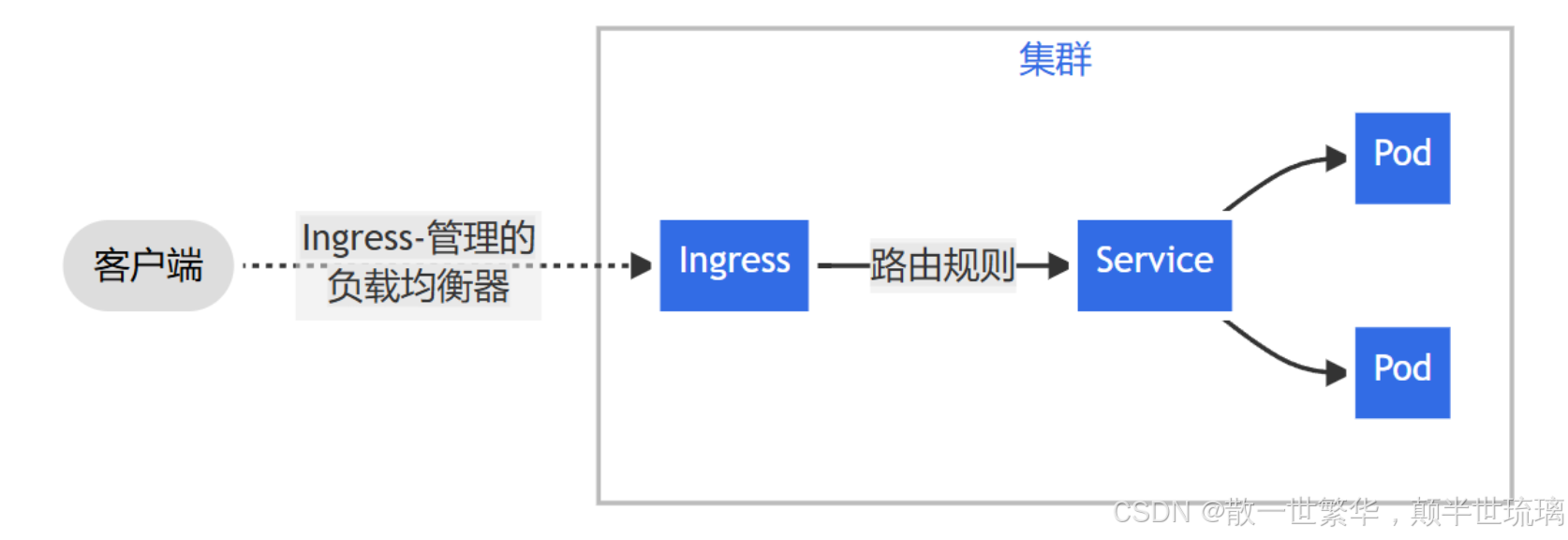
人工智能概要
目录 前言1.什么是人工智能(Artificial Intelligence, AI)2.人工智能发展的三次浪潮2.1 人工智能发展的第一次浪潮2.2 人工智能发展的第二次浪潮2.3 人工智能发展的第三次浪潮 3.人工智能发展的必备三要素3.1 数据3.2 算法(algorithm…...

qt QCommandLineParser详解
1、概述 QCommandLineParser是Qt框架中提供的一个类,专门用于解析命令行参数。它简化了命令行参数的处理过程,使得开发者能够轻松定义、解析和验证命令行选项和参数。QCommandLineParser适用于需要从命令行获取输入的控制台应用程序,以及需要…...

力扣 K个一组翻转链表
K个一组翻转链表 /*** Definition for singly-linked list.* struct ListNode {* int val;* ListNode *next;* ListNode() : val(0), next(nullptr) {}* ListNode(int x) : val(x), next(nullptr) {}* ListNode(int x, ListNode *next) : val(x), next(ne…...
cnocr配置及训练测试
cnocr配置及训练测试 1,相关链接2,已有模型调用测试(1)下载相关模型(2)Cnstd文本检测模型(3)模型调用解析脚本 3,自定义数据集训练测试(1)标签转换…...

解决 Flutter 在 Mac 上的编译错误
解决 Flutter 在 Mac 上的编译错误 在使用 Flutter 进行项目开发并尝试在 Mac 设备上进行编译时,遇到了一系列的错误信息,这些错误信息给项目的构建与部署带来了阻碍。 一、错误详情 在编译过程中,Xcode 输出了大量的信息,其中…...

MR30分布式IO在新能源领域加氢站的应用
导读 氢能被誉为21世纪最具发展潜力的清洁能源,氢能科技创新和产业发展持续得到各国青睐。氢能低碳环保,燃烧的产物只有水,是用能终端实现绿色低碳转型的重要载体。氢能产业链分别为上游制氢、中游储运以及下游用氢。上游制氢工艺目前大部分…...
wxPython中wx.ListCtrl用法(二)
wx.ListCtrl是一个列表组件,可以以列表视图(list view)、报表视图(report view)、图标视图(icon view)和小图标视图(small icon view)等多种模式显示列表。 一、方法 __…...

kubernetes 资源汇总
kubernetes 资源汇总 官网 英文文档 官方英文文档 中文文档 官方中文文档 github github源码地址 培训认证 也就是linux基金会的认证,上面也提供培训课程 下载资源 官网下载资源,国内的话k8s镜像下载不了,要去镜像站 在线练习 killer…...
)
每日一题(对标gesp三级答案将在第二天公布)
编程题 题目描述: 小杨为数字4,5,6和7设计了一款表示形式,每个数字占用了66的网格。数字4,5,6和7的表示形式如下(此处自行设计复杂一些的表示形式示例): 数字4: …. …. …. …. *… 数字5: …...

让 Win10 上网本 Debug 模式 QUDPSocket 信号槽 收发不丢包的方法总结
在前两篇文章里,我们探讨了不少UDP丢包的解决方案。经过几年的摸索测试,其实方法非常简单, 无需修改代码。 1. Windows 下设置UDP缓存 这个方法可以一劳永逸解决UDP的收发丢包问题,只要添加注册表项目并重启即可。即使用Qt的信号与槽&#…...

Python爬虫之使用BeautifulSoup进行HTML Document文档的解析
BeautifulSoup 是一个用于解析 HTML 和 XML 文档的 Python 库,它为开发者提供了一种简单的方式来查找、遍历和修改文档树。BeautifulSoup 特别擅长处理不规则或格式不佳的标记语言,可以自动更正无效的 HTML,因此在网页抓取(Web Sc…...
增强代码的层级结构注意事项)
不使用void HAL_TIM_Encoder_MspInit(TIM_HandleTypeDef* tim_encoderHandle)增强代码的层级结构注意事项
这是正常用cube Max生成的代码,这里以设置编码器为例。 GPIO初始化函数放在HAL_TIM_Encoder_MspInit这个回调函数中。代码正常运行/* TIM3 init function */ void MX_TIM3_Init(void) {TIM_Encoder_InitTypeDef sConfig {0};TIM_MasterConfigTypeDef sMasterConfig…...

SAP ECC老司机避坑指南:FAGLGVTR和F.07年结操作,这5个细节不注意就白干了
SAP ECC年结实战:FAGLGVTR与F.07操作中的5个致命陷阱 每到年末,财务部门的紧张气氛总是格外浓厚。对于使用SAP ECC系统的企业来说,年结操作就像一场没有彩排的现场演出——任何一个小失误都可能导致数据混乱、报表错误,甚至影响整…...

告别窄带!用ADS仿真带你搞懂Doherty放大器带宽瓶颈与三种宽带方案
突破Doherty放大器带宽限制:ADS仿真实战与三大宽带方案解析 在射频功率放大器设计中,Doherty结构因其高效率特性成为5G基站和现代通信系统的核心组件。然而传统设计面临严峻的带宽挑战——当信号频率偏离中心频点时,效率可能骤降30%以上。本文…...

037、LVGL动画类型与参数配置
LVGL动画类型与参数配置 上周帮一个做智能家居面板的客户调试,遇到个挺典型的坑:他用了lv_anim_set_path_cb()自定义了一个缓动曲线,结果动画跑起来像抽风一样忽快忽慢。我让他把回调函数贴出来一看——好家伙,路径函数里直接调了lv_anim_set_time()改时长。这种在动画执行…...

评估智能体性能:成功率、延迟与成本
一个从“拍脑袋优化”到“数据驱动调优”的真实转型故事 ——顺便聊聊我这三年烧掉的API费用和熬过的夜 去年夏天,我们团队做了一个电商智能客服Agent。上线第一周,各项指标看起来都挺正常:用户满意度4.7分,平均响应时间不到2秒。…...

JetBrains IDE试用期重置技术全解析:从原理到实战的开发者指南
JetBrains IDE试用期重置技术全解析:从原理到实战的开发者指南 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 在JetBrains IDE生态系统中,试用期管理是每个开发者都会面临的实际问题。ide…...

恒宇信通收购神导科技,业绩V型反转、技术高度互补,能否开启增长新周期?
5月13日,恒宇信通(300965.SZ)在停牌筹划半个月后,携一份重磅资产重组预案强势复牌,开盘即收获20cm一字涨停,报收79.20元/股。根据预案,恒宇信通拟通过发行股份及支付现金的方式,收购…...

别再死记硬背!一张图+三个口诀,快速理解自反、对称、传递闭包怎么求
离散数学闭包运算:图解口诀实战,3分钟掌握核心技巧 第一次接触离散数学中的闭包运算时,很多同学都会被各种定义和符号绕晕。其实只要掌握几个简单的视觉化技巧,就能像搭积木一样轻松构建自反、对称和传递闭包。本文将用最直观的关…...

bsnes性能优化技巧:CPU、SA1和SuperFX超频配置完全手册
bsnes性能优化技巧:CPU、SA1和SuperFX超频配置完全手册 【免费下载链接】bsnes bsnes is a Super Nintendo (SNES) emulator focused on performance, features, and ease of use. 项目地址: https://gitcode.com/gh_mirrors/bs/bsnes bsnes是一款专注于性能…...

《在自定义数据集上训练和运行 YOLOv8 模型的全面指南》
原文:towardsdatascience.com/the-comprehensive-guide-to-training-and-running-yolov8-models-on-custom-datasets-22946da259c3?sourcecollection_archive---------2-----------------------#2024-10-02 现在,通过 Python、命令行或 Google Colab 在…...