主导极点,传递函数零极点与时域模态
运动模态
控制系统的数学建模,可以采用微分方程或传递函数,两者具有相同的特征方程。在数学上,微分方程的解由特解和通解组成,具体求解过程可以参考:微分方程求解的三种解析方法。
如果 n n n阶微分方程,具有 n n n个互不相等的单重特征根 λ 1 , λ 2 , . . . , λ n \lambda_1,\lambda_2,...,\lambda_n λ1,λ2,...,λn,则称 e λ 1 t , e λ 2 t , . . . , e λ n t {e^{{\lambda _1}t}},{e^{{\lambda _2}t}},...,{e^{{\lambda _n}t}} eλ1t,eλ2t,...,eλnt为该系统的模态,也叫振型。每一种模态表示一种类型的运动形态,微分方程的齐次解为它们的线性组合,即
y ( t ) = c 1 e λ 1 t + c 2 e λ 2 t + . . . + c n e λ n t y\left( t \right) = {c_1}{e^{{\lambda _1}t}} + {c_2}{e^{{\lambda _2}t}} + ... + {c_n}{e^{{\lambda _n}t}} y(t)=c1eλ1t+c2eλ2t+...+cneλnt
对于其它类型的特征根类型,所对应的齐次解或模态表达式,如下所示:

极点与模态类型
相同权重下,对比不同模态所对应的冲击响应,结果如下。取传递函数为 1 s + 1 \frac{1}{s+1} s+11、 1 s + 10 \frac{1}{s+10} s+101和 1 s + 100 \frac{1}{s+100} s+1001,对应模态为 e − t e^{-t} e−t、 e − 10 t e^{-10t} e−10t和 e − 100 t e^{-100t} e−100t。所谓权重,指的是模态前的系数(这里均为1)。

clc;clear;close all;sys1 = tf(1, [1 1]); sys2 = tf(1, [1 10]); sys3 = tf(1, [1 100]); t = 0:0.01:10;
[y1, t1] = impulse(sys1, t); [y2, t2] = impulse(sys2, t); [y3, t3] = impulse(sys3, t);figure; hold on;
plot(t1, y1, 'b', 'LineWidth', 1.5); % 蓝色线表示1/(s+1)
plot(t2, y2, 'r', 'LineWidth', 1.5); % 红色线表示1/(s+10)
plot(t3, y3, 'g', 'LineWidth', 1.5); % 绿色线表示1/(s+100)legend('1/(s+1)', '1/(s+10)', '1/(s+100)');
xlabel('Time (s)');ylabel('Impulse Response');grid on;
总结:同等权重情况下,负实部越远离零轴,模态衰减越快;负实部越靠近零轴,模态衰减越慢;
零点与模态权重
将两种模态( e − t e^{-t} e−t和 e − 10 t e^{-10t} e−10t)进行等比例混合,结果如下:
G ( s ) = 0.5 s + 1 + 0.5 s + 10 = s + 5.5 ( s + 1 ) ( s + 10 ) G\left( s \right) = \frac{{0.5}}{{s + 1}} + \frac{{0.5}}{{s + 10}} = \frac{{s + 5.5}}{{\left( {s + 1} \right)\left( {s + 10} \right)}} G(s)=s+10.5+s+100.5=(s+1)(s+10)s+5.5
可以看到,混合的过程产生了一个特定的零点。也就是说,零点不引入新的模态,但却与各模态的相对权重有关。更一般地,假设零点为 − z -z −z,分析权重 α 、 β \alpha、\beta α、β随 z z z的变化规律,如下所示:
G ( s ) = s + z ( s + 1 ) ( s + 10 ) = α s + 1 + β s + 10 = 1 9 z − 1 9 s + 1 + 10 9 − 1 9 z s + 10 {G\left( s \right) = \frac{{s + z}}{{\left( {s + 1} \right)\left( {s + 10} \right)}} = \frac{\alpha }{{s + 1}} + \frac{\beta }{{s + 10}} = \frac{{\frac{1}{9}z - \frac{1}{9}}}{{s + 1}} + \frac{{\frac{{10}}{9} - \frac{1}{9}z}}{{s + 10}}} G(s)=(s+1)(s+10)s+z=s+1α+s+10β=s+191z−91+s+10910−91z

clc;clear;close all;
z = 0:0.5:11; alpha = (1/9) * z - (1/9); beta = (10/9) - (1/9) * z;figure; hold on;
plot(z, alpha, '-', 'LineWidth', 2, 'DisplayName', '\alpha');
plot(z, beta, '-', 'LineWidth', 2, 'DisplayName', '\beta');title('Comparison of \alpha and \beta vs. z'); legend('\alpha', '\beta'); grid on;
xlabel('零点位置'); ylabel('相对权重'); xticks([0,1,5.5,10]); yticks([0,0.5,1]);
总结:零点不引入模态,但却影响模态权重;当极点附近有零点时,对应模态权重明显下降,重叠时甚至会被对消;
输入与最终模态
最终响应模态不仅与系统固有传函有关,还与输入有关。假设系统传递函数为:
G ( s ) = C ( s ) R ( s ) = 6 ( s + 3 ) ( s + 1 ) ( s + 2 ) G\left( s \right) = \frac{{C\left( s \right)}}{{R\left( s \right)}} = \frac{{6\left( {s + 3} \right)}}{{\left( {s + 1} \right)\left( {s + 2} \right)}} G(s)=R(s)C(s)=(s+1)(s+2)6(s+3)
系统包含 e − t e^{-t} e−t、 e − 2 t e^{-2t} e−2t两个运动模态。当输入为 r ( t ) = R 1 + R 2 e − 5 t r\left( t \right) = {R_1} + {R_2}{e^{ - 5t}} r(t)=R1+R2e−5t时,系统最终零状态响应为:
{ c ( t ) = L − 1 [ C ( s ) ] = L − 1 [ 6 ( s + 3 ) ( s + 1 ) ( s + 2 ) ( R 1 s + R 2 s + 5 ) ] = 9 R 1 − R 2 e − 5 t + ( 3 R 2 − 12 R 1 ) e − t + ( 3 R 1 − 2 R 2 ) e − 2 t \left\{ \begin{aligned} c\left( t \right) &= {\mathcal{L}^{ - 1}}\left[ {C\left( s \right)} \right] = {\mathcal{L}^{ - 1}}\left[ {\frac{{6\left( {s + 3} \right)}}{{\left( {s + 1} \right)\left( {s + 2} \right)}}\left( {\frac{{{R_1}}}{s} + \frac{{{R_2}}}{{s + 5}}} \right)} \right] \\ &= 9{R_1} - {R_2}{e^{ - 5t}} + \left( {3{R_2} - 12{R_1}} \right){e^{ - t}} + \left( {3{R_1} - 2{R_2}} \right){e^{ - 2t}} \\ \end{aligned} \right. ⎩ ⎨ ⎧c(t)=L−1[C(s)]=L−1[(s+1)(s+2)6(s+3)(sR1+s+5R2)]=9R1−R2e−5t+(3R2−12R1)e−t+(3R1−2R2)e−2t
其中,前两项具有与输入函数 r ( t ) r(t) r(t)相同的模态;后两项则包含了由系统固有极点形成的模态。
总结
- 同等权重情况下,负实部越远离零轴,模态衰减越快;负实部越靠近零轴,模态衰减越慢;
- 零点不引入模态,但却影响模态权重;当极点附近有零点时,对应模态权重明显下降;
- 最终模态类型与系统极点和输入极点有关;模态权重与系统零点和输入零点有关(严格来说,极点与初始值也会影响权重);
- 当闭环极点同时满足,①靠近零轴,②附近无零点;它将能够在较长时域内决定整体曲线走势,也被称为主导极点;
参考文献
[1] 胡寿松. 自动控制原理 (第六版) [M]. 科学出版社, 2013.
[2] 余成波. 信号与系统 (第二版) [M]. 清华大学出版社, 2007.
[3] CSDN博客:微分方程求解的三种解析方法和Matlab实现:经典时域法(齐次解+特解,零状态+零输入),冲激响应卷积法、传递函数法。
相关文章:
主导极点,传递函数零极点与时域模态
运动模态 控制系统的数学建模,可以采用微分方程或传递函数,两者具有相同的特征方程。在数学上,微分方程的解由特解和通解组成,具体求解过程可以参考:微分方程求解的三种解析方法。 如果 n n n阶微分方程,具…...

永恒之蓝漏洞利用什么端口
永恒之蓝(EternalBlue)是一个著名的漏洞,影响了 Windows 操作系统的 SMBv1 服务。它的漏洞编号是 CVE-2017-0144,该漏洞被用于 WannaCry 等勒索病毒的传播。 永恒之蓝漏洞利用的端口 永恒之蓝漏洞利用的是 SMB(Server…...

网络安全与防范
1.重要性 随着互联网的发达,各种WEB应用也变得越来越复杂,满足了用户的各种需求,但是随之而来的就是各种网络安全的问题。了解常见的前端攻击形式和保护我们的网站不受攻击是我们每个优秀fronter必备的技能。 2.分类 XSS攻击CSRF攻击网络劫…...

Navicat 17 功能简介 | SQL 开发
Navicat 17 功能简介 | SQL 开发 随着 17 版本的发布,Navicat 也带来了众多的新特性,包括兼容更多数据库、全新的模型设计、可视化智能 BI、智能数据分析、可视化查询解释、高质量数据字典、增强用户体验、扩展 MongoDB 功能、轻松固定查询结果、便捷URI…...

嵌入式系统中的并行编程模型:汇总解析与应用
概述:随着嵌入式系统处理能力的不断提升,并行编程在其中的应用愈发广泛。本文深入探讨了多种专门为嵌入式设计的并行编程模型,包括任务队列模型、消息传递模型、数据并行模型、异构多核并行模型、实时任务调度模型以及函数式并行模型。详细阐…...

VulkanSamples编译记录
按照BUILD.md说明,先安装依赖项 sudo apt-get install git build-essential libx11-xcb-dev \libxkbcommon-dev libwayland-dev libxrandr-dev 然后创建一个新文件夹build,在该目录下更新依赖项 cd VulkanSamples mkdir build cd build python ../scr…...
)
使用FabricJS对大图像应用滤镜(巨坑)
背景:我司在canvas的渲染模板的宽高都大于2048px 都几乎接近4000px,就导致使用FabricJS的滤镜功能图片显示异常 新知识:滤镜是对图片纹理的处理 FabricJS所能支持的最大图片纹理是2048的 一但图片超出2048的纹理尺寸 当应用滤镜时,图像会被剪切或者是缩…...

网页502 Bad Gateway nginx1.20.1报错与解决方法
目录 网页报错的原理 查到的502 Bad Gateway报错的原因 出现的问题和尝试解决 问题 解决 网页报错的原理 网页显示502 Bad Gateway 报错原理是用户访问服务器时,nginx代理服务器接收用户信息,但无法反馈给服务器,而出现的报错。 查到…...

Spring基础分析02-BeanFactory与ApplicationContext
大家好,今天和大家一起学习整理一下Spring 的BeanFactory和ApplicationContext内容和区别~ BeanFactory和ApplicationContext是Spring IoC容器的核心组件,负责管理应用程序中的Bean生命周期和配置。我们深入分析一下这两个接口的区别、使用场景及其提供…...

Rerender A Video 技术浅析(五):对象移除与自动配色
Rerender A Video 是一种基于深度学习和计算机视觉技术的视频处理工具,旨在通过智能算法对视频进行重新渲染和优化。 一、对象移除模块 1. 目标检测 1.1 概述 目标检测是对象移除的第一步,旨在识别视频中需要移除的对象并生成相应的掩码(m…...

Java项目实战II基于微信小程序的小区租拼车管理信息系统 (开发文档+数据库+源码)
目录 一、前言 二、技术介绍 三、系统实现 四、核心代码 五、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。 一、前言 随着城市化进程的加速,小区居民对于出行方…...
【数字花园】数字花园(个人网站、博客)搭建经历汇总教程
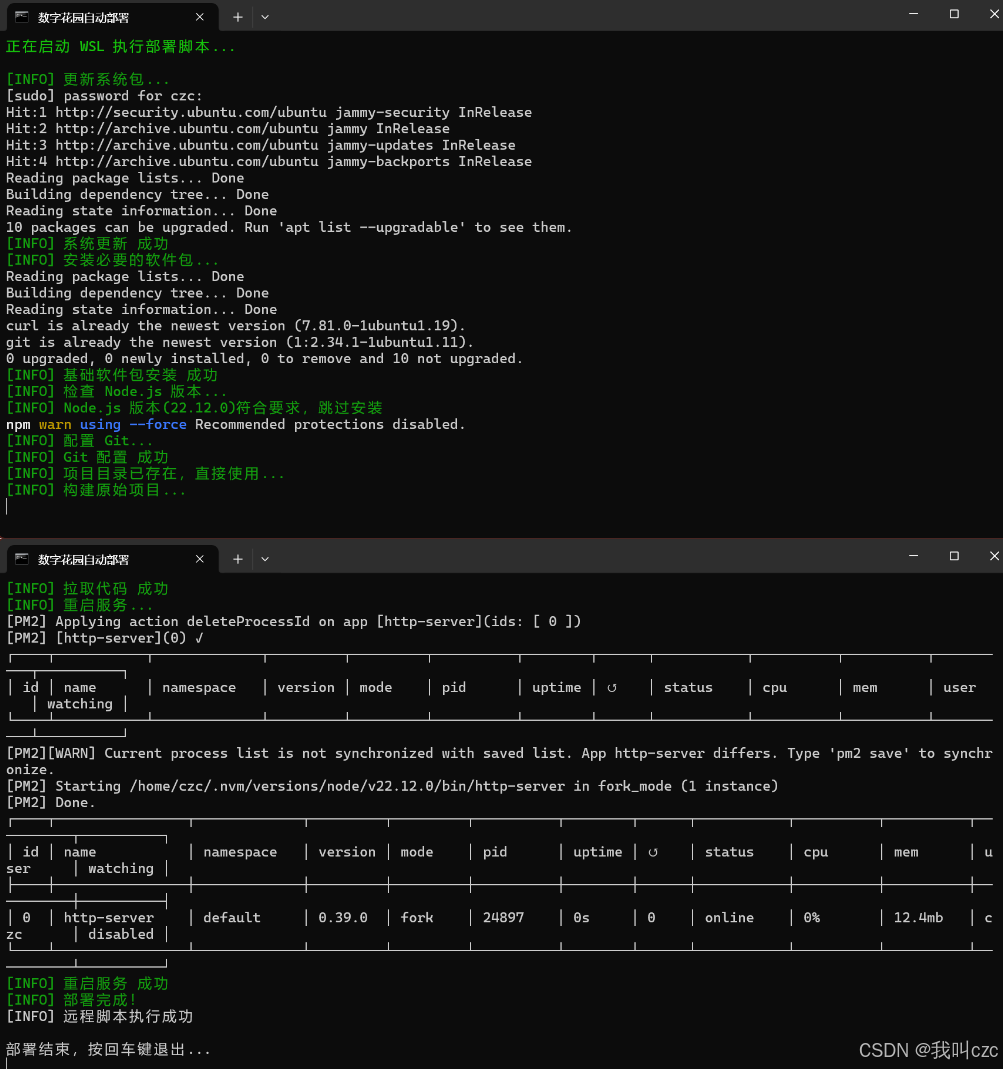
目录 写在最最前面第一章:netlify免费搭建数字花园相关教程使用的平台步骤信息管理 第二章:本地部署数字花园数字花园网站本地手动部署方案1. 获取网站源码2.2 安装 Node.js 3. 项目部署3.1 安装项目依赖3.2 构建项目3.3 启动http服务器 4. 本地预览5. 在…...

WebRTC服务质量(03)- RTCP协议
一、前言: RTCP(RTP Control Protocol)是一种控制协议,与RTP(Real-time Transport Protocol)一起用于实时通信中的控制和反馈。RTCP负责监控和调节实时媒体流。通过不断交换RTCP信息,WebRTC应用…...
STM32F103单片机HAL库串口通信卡死问题解决方法
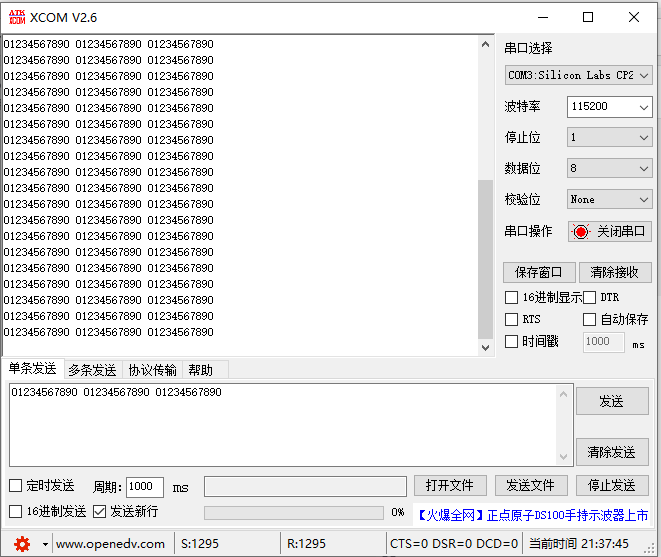
在上篇文章 STM32F103单片机使用STM32CubeMX创建IAR串口工程 中分享了使用cubeMX直接生成串口代码的方法,在测试的过程中无意间发现,串口会出现卡死的问题。 当串口一次性发送十几个数据的时候,串口感觉像卡死了一样,不再接收数据…...

Scala正则表达式
一、定义:正则表达式是一种用于匹配、查找和替换文本中特定模式的字符串。 使用方式:①定义一个正则 正则表达式应用场景:查找、验证、替换。 Ⅰ、查找 在目标字符串中,找到符合正则表达式规则要求的 子串。 方括号ÿ…...
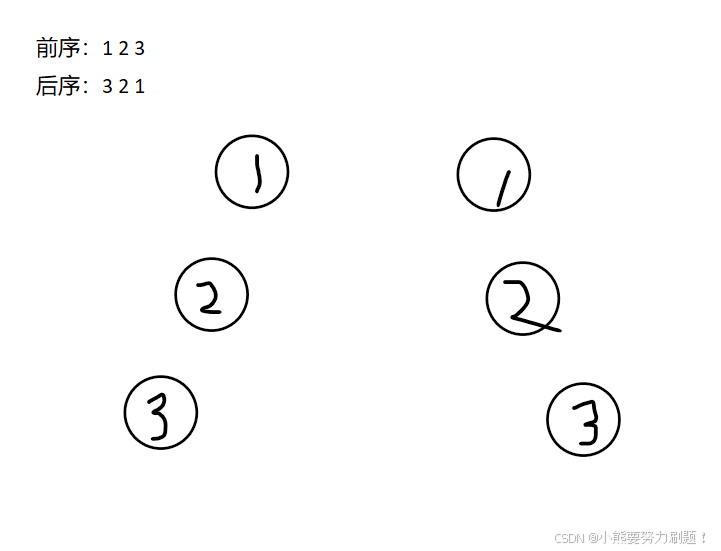
每日一刷——二叉树的构建——12.12
第一题:最大二叉树 题目描述:654. 最大二叉树 - 力扣(LeetCode) 我的想法: 我感觉这个题目最开始大家都能想到的暴力做法就是遍历找到数组中的最大值,然后再遍历一遍,把在它左边的依次找到最大…...
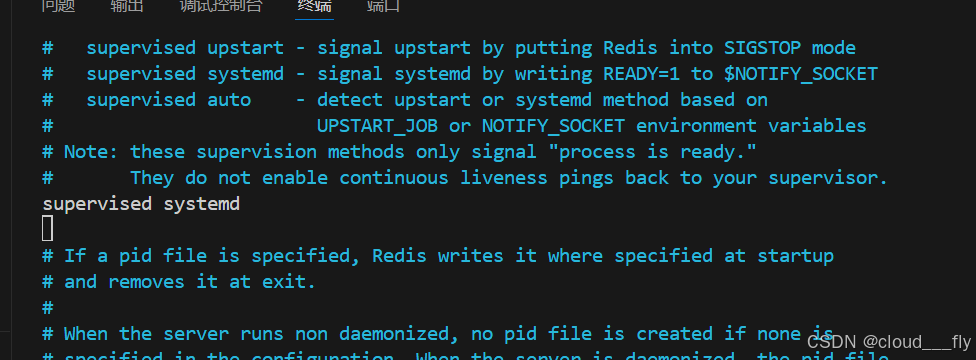
Redis配置文件中 supervised指令
什么是Supervised? supervised模式允许Redis被外部进程管理器监控。通过这个选项,Redis能够在崩溃后自动重启,确保服务的高可用性。常见的进程管理器包括systemd和upstart。 开启方法 vim修改: sudo vi /etc/redis/redis.conf…...
根据基础矩阵(Fundamental Matrix)校正两组匹配点函数correctMatches()的使用)
OpenCV相机标定与3D重建(18)根据基础矩阵(Fundamental Matrix)校正两组匹配点函数correctMatches()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 优化对应点的坐标。 cv::correctMatches 是 OpenCV 库中的一个函数,用于根据基础矩阵(Fundamental Matrix)校…...
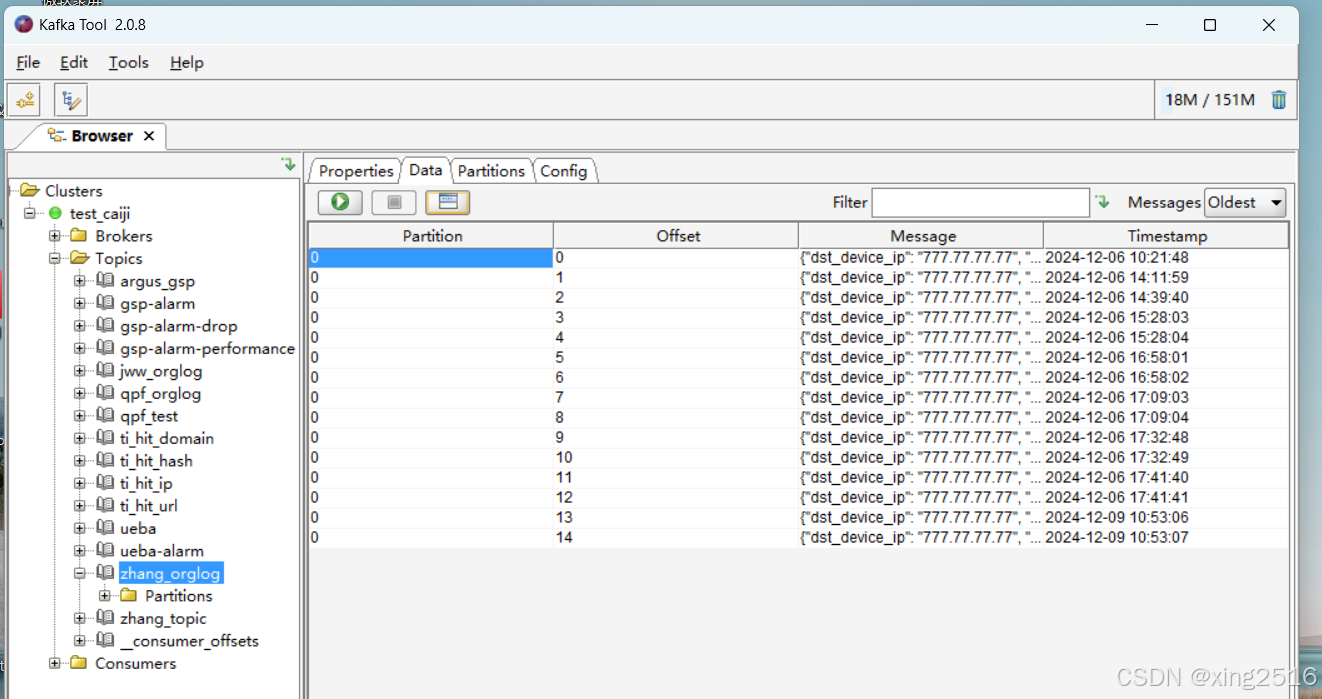
python脚本:向kafka数据库中插入测试数据
# coding:utf-8 import datetime import json import random import timefrom kafka import KafkaProducer生产者demo向branch-event主题中循环写入10条json数据注意事项:要写入json数据需加上value_serializer参数,如下代码producer KafkaProducer(val…...
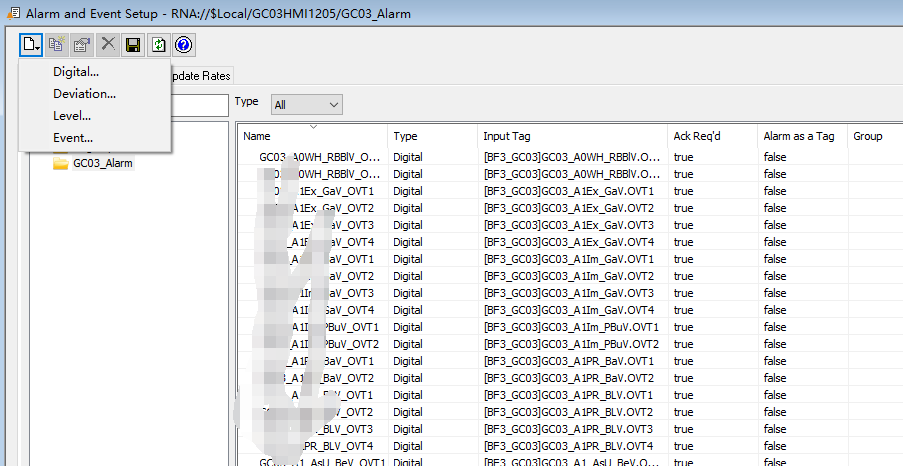
10. 高效利用Excel导入报警信息
高效利用Excel导入报警信息 1.添加报警服务器2.导出报警EXCEL3.报警控件使用1.添加报警服务器 右键项目名称——Add New Sever——Tag Alarm and Event Sever 给报警服务器命名Alarm 给报警服务器分配优先级。如果想要使能历史的话需要和SQL sever配合使用,之前写过。记住这…...
)
倍福官网改版后,如何用F12开发者工具找回消失的Twincat3老版本安装包(附4024.11下载链接)
倍福官网改版后如何找回消失的Twincat3老版本安装包 作为一名自动化工程师,你是否遇到过这样的困境:项目需要特定版本的Twincat3进行维护或兼容性测试,但倍福官网改版后,历史版本下载入口却神秘消失了?这种情况在工业软…...
)
Python项目交付倒计时?用Gemini自动补全+单元测试+异常修复(实测缩短交付周期68%)
更多请点击: https://intelliparadigm.com 第一章:Python项目交付倒计时?用Gemini自动补全单元测试异常修复(实测缩短交付周期68%) 在紧迫的项目截止日前,Python 开发者常陷入“写完即上线、出错再救火”的…...

告别虚拟机卡顿:在 Windows WSL2 的 Kali 子系统中配置 Pwn 调试环境
告别虚拟机卡顿:在 Windows WSL2 的 Kali 子系统中配置 Pwn 调试环境 对于安全研究人员和 CTF 爱好者来说,Kali Linux 是必不可少的工具集。然而,传统的虚拟机方案常常面临性能瓶颈——内存占用高、启动速度慢、与主机系统交互不便。WSL2 的出…...

3大核心优势:QModMaster如何成为工业通信调试的必备利器
3大核心优势:QModMaster如何成为工业通信调试的必备利器 【免费下载链接】qModbusMaster Fork of QModMaster (https://sourceforge.net/p/qmodmaster/code/ci/default/tree/) 项目地址: https://gitcode.com/gh_mirrors/qm/qModbusMaster 你是否曾在调试工业…...

TarsCpp协程实现原理:从用户态上下文切换看高性能RPC框架设计
1. 从线程到协程:为什么TarsCpp要拥抱协程?在分布式微服务架构里,我们每天都在和RPC、网络IO、并发处理打交道。传统的多线程模型,一个请求一个线程,逻辑清晰,但线程创建、上下文切换的开销,以及…...

Nornir网络自动化监控插件:集成Sentry实现异常告警与上下文追踪
1. 项目概述:一个为Nornir网络自动化框架量身定制的告警与监控插件 如果你和我一样,长期使用Nornir框架来管理成百上千的网络设备,那你一定遇到过这样的场景:一个精心编写的自动化任务在测试环境跑得飞快,一旦放到生产…...

从白噪声到ARMA谱:平稳随机信号功率谱的实战解析
1. 平稳随机信号功率谱密度的工程意义 第一次接触功率谱密度这个概念时,我也被那一堆数学公式搞得头晕。直到有次在调试通信设备时,发现接收端总是有奇怪的干扰,导师让我做个频谱分析,这才真正明白功率谱密度到底有什么用。简单来…...
)
告别XDMA限制:用开源Riffa框架在Linux下轻松实现多通道PCIE DMA通信(Kintex-7实测)
突破XDMA瓶颈:开源Riffa框架在Linux下的多通道PCIE DMA实战指南(Kintex-7验证) 当FPGA开发者面临高速数据采集、实时信号处理或多设备协同工作时,PCIE DMA通道的数量往往成为系统性能的瓶颈。Xilinx官方XDMA方案虽然稳定ÿ…...
从零构建Claude代码:深入Transformer架构与自回归生成实现
1. 项目概述:从零构建你自己的Claude代码最近在开发者社区里,一个名为“woodx9/build-your-claude-code-from-scratch”的项目引起了我的注意。这个标题直译过来就是“从零开始构建你的Claude代码”,它指向了一个非常具体且富有挑战性的目标&…...

别再混淆了!给数据科学新手的平稳性、自相关性核心概念白话图解
时间序列分析入门:用生活化类比理解平稳性与自相关性 刚接触时间序列分析时,你是否曾被"平稳性"和"自相关性"这些术语搞得一头雾水?就像第一次学游泳时,教练说的"打腿节奏"和"换气时机"一…...