PCL点云库入门——PCL库中Eigen数学工具库的基本使用(持续更新)
0、前言
PCL点云库中的算法都基于Eigen数学工具库来实现的,因此,掌握Eigen库对于深入理解和应用PCL点云库至关重要。Eigen库不仅提供了高效的矩阵和向量运算,还支持复杂的线性代数、几何变换等操作,为PCL点云处理提供了强大的数学支持。PCL库中已经包含了Eigen库不需要单独的安装,直接包含头文件就可以使用,因此安装不在讲述。
1、Eigen库的简介
Eigen库是一个高性能的C++模板库,专注于线性代数、矩阵和向量运算,以及相关的数值分析和算法。
1.1、Eigen库的特性
Eigen库有如下一些特点:
1)、易用性
Eigen库是一个头文件库,这意味着它不需要编译成库文件,也不需要动态链接。开发者只需将Eigen的头文件包含在项目中即可使用,这极大地简化了集成过程。同时,Eigen支持多种数据类型,包括整数、浮点数和复数等,通过模板编程,Eigen能够为这些数据类型提供高效的矩阵和向量运算。
2)、高性能与优化
Eigen经过高度优化,能够充分利用现代CPU的性能。它支持SIMD(单指令多数据)指令集,如SSE和AVX,以及多线程计算,从而实现了高效的并行运算。此外,Eigen对稀疏矩阵和密集矩阵都提供了良好的支持,并且针对各种矩阵运算进行了优化,如矩阵乘法、矩阵分解(如Cholesky分解、QR分解、SVD分解)等。
3)、灵活性与可扩展性
Eigen库提供了多种矩阵大小选项,包括动态大小和固定大小,以满足不同的应用需求。用户还可以自定义扩展Eigen以适应特殊的数据结构或运算。这种灵活性和可扩展性使得Eigen能够广泛应用于各种领域。
4)、应用领域广
Eigen库被广泛应用于科学计算、机器学习、计算机图形学、计算机视觉、信号处理、金融等领域。在科学计算中,Eigen可以用于求解线性方程组、矩阵分解和特征值问题等。在机器学习和计算机视觉中,Eigen常用于数据降维、模型参数估计、图像特征提取等任务。此外,Eigen还支持常用的几何运算,如旋转矩阵、四元数、矩阵变换等,这使得它在3D计算和机器人学中也具有广泛的应用。
1.2、Eigen库中的主要模块
Eigen库中的主要模块如下表所示:
| 功能模块 | 简要功能描述 |
| Core | 包含Matrix和Array类,支持基础的线性代数运算和数组操作。 |
| Geometry | 提供旋转、平移、缩放以及2维和3维的各种变换功能。 |
| LU | 用于求逆、行列式以及LU分解。 |
| Cholesky | 支持LLT和LDLT Cholesky分解。 |
| Householder | 提供Householder变换。 |
| SVD | 实现奇异值分解(SVD),并配备最小二乘解算器。 |
| QR | 实现QR分解,并提供HouseholderQR、ColPivHouseholderQR、FullPivHouseholderQR三种方法。 |
| Eigenvalues | 用于特征值和特征向量的分解,提供EigenSolver、SelfAdjointEigenSolver、ComplexEigenSolver等方法 |
| Sparse | 支持稀疏矩阵的存储和运算。 |
| Dense | 包含Core、Geometry、LU、Cholesky、SVD、QR、Eigenvalues等模块,是Eigen库的核心部???? |
2、Eigen库中向量和矩阵的定义
在Eigen库中,所有的矩阵和向量均被视为矩阵模板类的实例。向量可以被看作是特殊形式的矩阵,具体表现为只包含1行或1列。
2.1、 Eigen库中的矩阵类
Eigen库中Matrix类包含六个模板参数,目前仅需掌握其前三个参数。余下的三个参数均设有默认值,目前我们不予以深入探讨,后续章节将对此进行详细讨论。
Matrix的三个必要模板参数为:
Matrix<typename Scalar, int RowsAtCompileTime, int ColsAtCompileTime>其中三个参数的含义如下:
Scalar:代表标量类型,即数据类型。换言之,若您需要一个浮点数矩阵,请在此选择float。
常用的还有double和int类型。
RowsAtCompileTime和ColsAtCompileTime:指的是在编译阶段已确定的矩阵行数和列数(若编译时无法确定,可以动态的指定后面进行讨论)。
Eigen库中提供了许多常用的矩阵类型的定义。Eigen常用的矩阵定义有如下:
//2维方矩阵Eigen::Matrix2i;Eigen::Matrix2f;Eigen::Matrix2d;Eigen::Matrix2cf;Eigen::Matrix2cd;//3维方矩阵Eigen::Matrix3i;Eigen::Matrix3f;Eigen::Matrix3d;Eigen::Matrix3cf;Eigen::Matrix3cd;//4维方矩阵Eigen::Matrix4i;Eigen::Matrix4f;Eigen::Matrix4d;Eigen::Matrix4cf;Eigen::Matrix4cd; Eigen库定义的都是比较常用的定义,矩阵维度小于4的,但维度超过4时,我们可以根据自己的数据进行定义,方式如下:
typedef Eigen::Matrix<float, 10, 10> Matrix10f;//10维的方正,其他类型的可以参照此定义方式进行。typedef Eigen::Matrix<double, 10, 10> Matrix10d;//10维的方正,其他类型的可以参照此定义方式进typedef Eigen::Matrix<double, 10, 10> Matrix10d;typedef Eigen::Matrix<float, 10, 15> Matrix10_15f;2.2 、Eigen库中的向量
正如先前所述,在Eigen库中,向量实际上是矩阵的一个特例,它们要么仅包含1行,要么仅包含1列。最常见的情形是仅含1列的向量,这种向量被称为列向量,通常简称为向量。相对地,仅含1行的向量则被称为行向量。
//2维向量Eigen::Vector2i;Eigen::Vector2f;Eigen::Vector2d;Eigen::Vector2cf;Eigen::Vector2cd;//3维向量Eigen::Vector3i;Eigen::Vector3f;Eigen::Vector3d;Eigen::Vector3cf;Eigen::Vector3cd;//4维向量Eigen::Vector4i;Eigen::Vector4f;Eigen::Vector4d;Eigen::Vector4cf;Eigen::Vector4cd;注意:Eigen库中上述常用定义的向量是列向量,定义方式是:
typedef Matrix<float, 3, 1> Vector3f;另外,行向量的定义为:
typedef Matrix<int, 1, 2> RowVector2i;按照自己的数据大小定义为:
typedef Eigen::Matrix<float, 10, 1> Vector10f;//10维的向量,其他类型的可以参照此定义方式进行。2.3 、Eigen库中矩阵的动态维度(行、列)
Eigen库的功能不仅限于处理编译时已知维度的矩阵。通过使用模板参数RowsAtCompileTime和ColsAtCompileTime,我们可以指定一个特殊值Dynamic,这表明矩阵的维度在编译时是未知的,因此必须在运行时作为变量处理。在Eigen库中,这样的维度被称为动态大小;相对地,编译时已知的维度则被称为固定大小。例如,定义的 typedef MatrixXd 类型,它表示一个具有动态大小的双精度矩阵,其定义如下:
typedef Matrix<double, Dynamic, Dynamic> MatrixXd;同理,可以定义了动态的向量类型VectorXi,定义如下:
typedef Matrix<int, Dynamic, 1> VectorXi;
3、Eigen库中矩阵和向量的初始化
下面对常用矩阵和向量的初始化进行应用实例说明。
3.1、矩阵的初始化
方式1 :‘<<’法:
Eigen:: Matrix3f m;m << 1, 2, 3,4, 5, 6,7, 8, 9;方式2:‘(i,j)’法:
Eigen::Matrix3f m2;m2(0, 0) = 1, m2(0, 1) = 2, m2(0, 2) = 3;m2(1, 0) = 3, m2(1, 1) = 5, m2(1, 2) = 6;m2(2, 0) = 7, m2(2, 1) = 8, m2(2, 2) = 8;方式3 :常数矩阵法:
//零矩阵Eigen::Matrix4f rt1 = Eigen::Matrix4f::Zero();//单位矩阵Eigen::Matrix4f rt2 = Eigen::Matrix4f::Identity();//随机矩阵Eigen::Matrix4f rt3 = Eigen::Matrix4f::Random();3.2、向量的初始化
方式1: ‘<<’法:
Eigen::Vector3f v1;v1 << 1, 2, 3;方式2:‘(i)’法:
Eigen::Vector3f v1;v1(0) = 1;v1(1) = 2;v1(2) = 3;方式3: 常数矩阵法:
//全部值是0的向量Eigen::Vector3f v2 = Eigen::Vector3f::Zero();//全部值是1的向量Eigen::Vector3f v3 = Eigen::Vector3f::Identity();//随机向量Eigen::Vector3f v4 = Eigen::Vector3f::Random();方式4 :构造法:
Eigen::Vector3f v5(1, 2, 3);4、Eigen库中矩阵和向量的算术操作
Eigen库重载了常见的C++算术运算符(例如 +、-、*),以支持矩阵和向量的算术运算,如 dot() 和 cross() 等函数。对于Matrix类(包括矩阵和向量),运算符重载仅限于支持线性代数操作。例如,Matrix1 * Matrix2 表示两个矩阵的乘积,而向量与标量的加法是不被允许的。若需执行非线性代数的各种数组运算,则必须依赖于数组运算,这部分内容将在后续讨论。
4.1 、矩阵/向量加减
void MatrixVector_AddAndSubtraction()
{Eigen::Matrix2d a;a << 1, 2,3, 4;Eigen::MatrixXd b(2, 2);b << 2, 3,1, 4;std::cout << "a + b =\n" << a + b << std::endl;std::cout << "a - b =\n" << a - b << std::endl;a += b;std::cout << "Now a =\n" << a << std::endl;Eigen::RowVector3d v(1, 2, 3);Eigen::RowVector3d w(1, 0, 0);std::cout << "-v + w - v =\n" << -v + w - v << std::endl;
}结果:

4.2、标量与矩阵/向量的乘除
示例代码:
void MatrixVectore_ScalarMD()
{Eigen::Matrix2d a;a << 1, 1,1, 1;Eigen::Vector3d v(1, 2, 3);std::cout << "a * 3 =\n" << a * 3 << std::endl;std::cout << "3 * v =\n" << 3 * v << std::endl;v *= 2;std::cout << "Now v =\n" << v << std::endl;Eigen::Matrix2d b;b << 9, 9,9, 9;Eigen::Vector3d v2(2, 4, 6);std::cout << "a / 3 =\n" << (b / 3 )<< std::endl;std::cout << " v/2 =\n" << (v2/2) << std::endl;
}结果:

4.3、矩阵与矩阵、矩阵与向量的相乘
代码示例:
void MatrixVectoreMulti()
{Eigen::Matrix2d a;a << 1, 1,1, 1;Eigen::Matrix2d b;b << 9, 9,9, 9;std::cout << "a *b =\n" << a*b << std::endl;Eigen::Vector3d v(2, 4, 6);Eigen::Matrix3d m = Eigen::Matrix3d::Random();std::cout << "m =\n" <<m << std::endl;std::cout << "v*m=\n" <<m*v << std::endl;}结果:

4.4、向量的点乘和叉乘
代码示例:
void VectorDotAndCross()
{Eigen::Vector3d v(1, 2, 3);Eigen::Vector3d w(1, 1, 1);cout << "Dot product: " << v.dot(w) << endl;double dp = v.adjoint() * w; cout << "Dot product via a matrix product: " << dp << endl;cout << "Cross product:\n" << v.cross(w) << endl;
}结果:

4.5、Eigen库中归约操作
Eigen还提供了一系列归约操作,用于将给定的矩阵或向量简化为单一数值。这些操作包括计算总和(通过sum()函数)、乘积(通过prod()函数)、以及所有系数的最大值(通过maxCoeff()函数)和最小值(通过minCoeff()函数)。
代码示例:
void ReductionOperations()
{Eigen::Matrix2d mat;mat << 4, 5,6, 7;cout << "Matrix is mat.sum(): " << mat.sum() << endl; cout << "Matrix is mat.prod(): " << mat.prod() << endl; cout << "Matrix is mat.mean(): " << mat.mean() << endl; cout << "Matrix is mat.minCoeff(): " << mat.minCoeff() << endl; cout << "Matrix is mat.maxCoeff(): " << mat.maxCoeff() << endl; cout << "Matrix is mat.trace(): " << mat.trace() << endl;
}结果:

5、矩阵的块操作
本小节主要进行矩阵中块操作的要点说明。块是矩阵或数组的矩形部分。块表达式既可以用作右值,也可以用作左值。与通常的Eigen表达式一样,只要让编译器进行优化,块操作的运行时成本为零。Eigen中有两个版本的块操作,语法如下:
| 块操作 | 动态尺寸块 | 固定尺寸块 |
| Block of size (p,q), starting at (i,j) | matrix.block(i,j,p,q); | matrix.block<p,q>(i,j); |
在Eigen库中,索引从0开始的。这两个版本均适用于处理固定尺寸和动态尺寸的矩阵与数组。从语义上讲,这两种表达方式是等效的。唯一的差异在于,当处理的块维度较小时,固定稳定版本往往能够生成更快速的代码,前提是编译时已知该尺寸。
5.1、块的基本操作
代码示例:
void BasicOperationBlock()
{Eigen::MatrixXf m(4, 4);m << 1, 2, 3, 4,5, 6, 7, 8,9, 10, 11, 12,13, 14, 15, 16;cout << m.block<3, 3>(1, 1) << endl << endl;for (int i = 1; i <= 3; ++i){cout << "Block of size " << i << "x" << i << endl;cout << m.block(0, 0, i, i) << endl << endl;}
}结果:

5.2、块左值操作
代码示例:
void OperationBlockLetfValue()
{Eigen::Array22f m;m << 1, 2,3, 4;Eigen::Array44f a = Eigen::Array44f::Constant(0.6);cout << "Array a:" << endl << a << endl << endl;a.block<2, 2>(1, 1) = m;cout << "Here is now a with m copied into its central 2x2 block:" << endl << a << endl << endl;a.block(0, 0, 2, 3) = a.block(2, 1, 2, 3);cout << "Here is now a with bottom-right 2x3 block copied into top-left 2x3 block:" << endl << a << endl << endl;
}结果:

5.3、块的行和列操作
代码示例:
void OperationBlockRowAndCol()
{Eigen::MatrixXf m(3, 3);m << 1, 2, 3,4, 5, 6,7, 8, 9;cout << "M:" << endl << m << endl;cout << "2nd Row: " << m.row(1) << endl;m.col(2) += 3 * m.col(0);cout << "After adding 3 times the first column into the third column, the matrix m is:\n";cout << m << endl;
}结果:

5.4、块的角点操作
Eigen库提供了专门的方法来处理矩阵或数组角部或边缘的块操作。例如,.topleftcorner()方法可用于引用矩阵左上角的特定块。下表总结了不同的角点操作:
| 块操作 | 动态尺寸块 | 固定尺寸块 |
| Top-left p by q block * | matrix.topLeftCorner(p,q); | matrix.topLeftCorner<p,q>(); |
| Bottom-left p by q block * | matrix.bottomLeftCorner(p,q); | matrix.bottomLeftCorner<p,q>(); |
| Top-right p by q block * | matrix.topRightCorner(p,q); | matrix.topRightCorner<p,q>(); |
| Bottom-right p by q block * | matrix.bottomRightCorner(p,q); | matrix.bottomRightCorner<p,q>(); |
| Block containing the first q rows * | matrix.topRows(q); | matrix.topRows<q>(); |
| Block containing the last q rows * | matrix.bottomRows(q); | matrix.bottomRows<q>(); |
| Block containing the first p columns * | matrix.leftCols(p); | matrix.leftCols<p>(); |
| Block containing the last q columns * | matrix.rightCols(q); | matrix.rightCols<q>(); |
| Block containing the q columns starting from i * | matrix.middleCols(i,q); | matrix.middleCols<q>(i); |
| Block containing the q rows starting from i * | matrix.middleRows(i,q); | matrix.middleRows<q>(i); |
示例代码:
void CornerOperationBlock()
{Eigen::Matrix4f m=Eigen::Matrix4f::Random();cout << "m = " << endl << m << endl;cout << "m.leftCols(2) =" << endl << m.leftCols(2) << endl << endl;cout << "m.bottomRows<2>() =" << endl << m.bottomRows<2>() << endl << endl;m.topLeftCorner(1, 3) = m.bottomRightCorner(3, 1).transpose();cout << "After assignment, m = " << endl << m << endl;
}结果:

6、向量的块操作
同样Eigen库也为向量和数组提供了块操作,格式如下表。
| 块操作 | 动态尺寸块 | 固定尺寸块 |
| Block containing the first n elements * | vector.head(n); | vector.head<n>(); |
| Block containing the last n elements * | vector.tail(n); | vector.tail<n>(); |
| Block containing n elements, starting at position i * | vector.segment(i,n); | vector.segment<n>(i); |
代码示例:
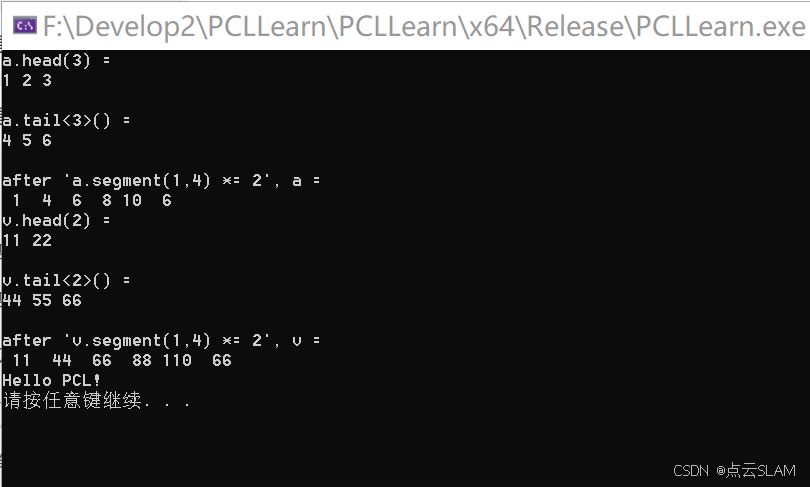
void VectroeOperationBlock()
{Eigen::ArrayXf a(6);a << 1, 2, 3, 4, 5, 6;cout << "a.head(3) =" << endl << a.head(3).transpose() << endl << endl;cout << "a.tail<3>() = " << endl << a.tail<3>().transpose() << endl << endl;a.segment(1, 4) *= 2;cout << "after 'a.segment(1,4) *= 2', a =" << endl << a.transpose() << endl;Eigen::VectorXf v(6);v << 11, 22, 33, 44, 55, 66;cout << "v.head(2) =" << endl << v.head(2).transpose() << endl << endl;cout << "v.tail<2>() = " << endl << v.tail<3>().transpose() << endl << endl;v.segment(1, 4) *= 2;cout << "after 'v.segment(1,4) *= 2', v =" << endl << v.transpose() << endl;}结果:
7、所有示例代码
新建文件名PCLEigenmain.cpp,内容如下:
/*****************************************************************//**
* \file PCLEigenmain.cpp
* \brief
*
* \author YZS
* \date December 2024
*********************************************************************/
#include <iostream>
#include <string>
#include <Eigen/Dense> //Eigen 头文件
using namespace std;void MatrixVector_AddAndSubtraction()
{Eigen::Matrix2d a;a << 1, 2,3, 4;Eigen::MatrixXd b(2, 2);b << 2, 3,1, 4;std::cout << "a + b =\n" << a + b << std::endl;std::cout << "a - b =\n" << a - b << std::endl;a += b;std::cout << "Now a =\n" << a << std::endl;Eigen::RowVector3d v(1, 2, 3);Eigen::RowVector3d w(1, 0, 0);std::cout << "-v + w - v =\n" << -v + w - v << std::endl;
}void MatrixVectore_ScalarMD()
{Eigen::Matrix2d a;a << 1, 1,1, 1;Eigen::Vector3d v(1, 2, 3);std::cout << "a * 3 =\n" << a * 3 << std::endl;std::cout << "3 * v =\n" << 3 * v << std::endl;v *= 2;std::cout << "Now v =\n" << v << std::endl;Eigen::Matrix2d b;b << 9, 9,9, 9;Eigen::Vector3d v2(2, 4, 6);std::cout << "a / 3 =\n" << (b / 3 )<< std::endl;std::cout << " v/2 =\n" << (v2/2) << std::endl;
}void MatrixVectoreMulti()
{Eigen::Matrix2d a;a << 1, 1,1, 1;Eigen::Matrix2d b;b << 9, 9,9, 9;std::cout << "a *b =\n" << a*b << std::endl;Eigen::Vector3d v(2, 4, 6);Eigen::Matrix3d m = Eigen::Matrix3d::Random();std::cout << "m =\n" <<m << std::endl;std::cout << "v*m=\n" <<m*v << std::endl;}void VectorDotAndCross()
{Eigen::Vector3d v(1, 2, 3);Eigen::Vector3d w(1, 1, 1);cout << "Dot product: " << v.dot(w) << endl;double dp = v.adjoint() * w; cout << "Dot product via a matrix product: " << dp << endl;cout << "Cross product:\n" << v.cross(w) << endl;
}void ReductionOperations()
{Eigen::Matrix2d mat;mat << 4, 5,6, 7;cout << "Matrix is mat.sum(): " << mat.sum() << endl; cout << "Matrix is mat.prod(): " << mat.prod() << endl; cout << "Matrix is mat.mean(): " << mat.mean() << endl; cout << "Matrix is mat.minCoeff(): " << mat.minCoeff() << endl; cout << "Matrix is mat.maxCoeff(): " << mat.maxCoeff() << endl; cout << "Matrix is mat.trace(): " << mat.trace() << endl;
}void BasicOperationBlock()
{Eigen::MatrixXf m(4, 4);m << 1, 2, 3, 4,5, 6, 7, 8,9, 10, 11, 12,13, 14, 15, 16;cout << m.block<3, 3>(1, 1) << endl << endl;for (int i = 1; i <= 3; ++i){cout << "Block of size " << i << "x" << i << endl;cout << m.block(0, 0, i, i) << endl << endl;}
}void OperationBlockLetfValue()
{Eigen::Array22f m;m << 1, 2,3, 4;Eigen::Array44f a = Eigen::Array44f::Constant(0.6);cout << "Array a:" << endl << a << endl << endl;a.block<2, 2>(1, 1) = m;cout << "Here is now a with m copied into its central 2x2 block:" << endl << a << endl << endl;a.block(0, 0, 2, 3) = a.block(2, 1, 2, 3);cout << "Here is now a with bottom-right 2x3 block copied into top-left 2x3 block:" << endl << a << endl << endl;
}void OperationBlockRowAndCol()
{Eigen::MatrixXf m(3, 3);m << 1, 2, 3,4, 5, 6,7, 8, 9;cout << "M:" << endl << m << endl;cout << "2nd Row: " << m.row(1) << endl;m.col(2) += 3 * m.col(0);cout << "After adding 3 times the first column into the third column, the matrix m is:\n";cout << m << endl;
}void CornerOperationBlock()
{Eigen::Matrix4f m=Eigen::Matrix4f::Random();cout << "m = " << endl << m << endl;cout << "m.leftCols(2) =" << endl << m.leftCols(2) << endl << endl;cout << "m.bottomRows<2>() =" << endl << m.bottomRows<2>() << endl << endl;m.topLeftCorner(1, 3) = m.bottomRightCorner(3, 1).transpose();cout << "After assignment, m = " << endl << m << endl;
}void VectroeOperationBlock()
{Eigen::ArrayXf a(6);a << 1, 2, 3, 4, 5, 6;cout << "a.head(3) =" << endl << a.head(3).transpose() << endl << endl;cout << "a.tail<3>() = " << endl << a.tail<3>().transpose() << endl << endl;a.segment(1, 4) *= 2;cout << "after 'a.segment(1,4) *= 2', a =" << endl << a.transpose() << endl;Eigen::VectorXf v(6);v << 11, 22, 33, 44, 55, 66;cout << "v.head(2) =" << endl << v.head(2).transpose() << endl << endl;cout << "v.tail<2>() = " << endl << v.tail<3>().transpose() << endl << endl;v.segment(1, 4) *= 2;cout << "after 'v.segment(1,4) *= 2', v =" << endl << v.transpose() << endl;}int main(int argc, char* argv[])
{//MatrixVector_AddAndSubtraction();//MatrixVectore_ScalarMD();//MatrixVectoreMulti();//VectorDotAndCross();//ReductionOperations();//BasicOperationBlock();//OperationBlockLetfValue();//OperationBlockRowAndCol();//CornerOperationBlock();VectroeOperationBlock();std::cout << "Hello PCL!" << std::endl;std::system("pause");return 0;
}至此完成第六节PCL库中Eigen数学工具库简单学习,由于Eigen库涉及的应用较多,后序还会持续更新该库的更多应用。下一节我们将进入《PCL库中点云数据的拓扑关系构建》的学习。
相关文章:
PCL点云库入门——PCL库中Eigen数学工具库的基本使用(持续更新)
0、前言 PCL点云库中的算法都基于Eigen数学工具库来实现的,因此,掌握Eigen库对于深入理解和应用PCL点云库至关重要。Eigen库不仅提供了高效的矩阵和向量运算,还支持复杂的线性代数、几何变换等操作,为PCL点云处理提供了强大的数学…...

CLion Inlay Hints - 取消 CLion 灰色的参数和类型提示
CLion Inlay Hints - 取消 CLion 灰色的参数和类型提示 1. Parameter hints for C/C1.1. Toggle parameter hints globally 2. Type hints for C/C2.1. Toggle type hints globally 3. Toggle inlay hints globallyReferences https://www.jetbrains.com/help/clio…...
2025山东科技大学考研专业课复习资料一览
[冲刺]2025年山东科技大学020200应用经济学《814经济学之西方经济学[宏观部分]》考研学霸狂刷870题[简答论述计算题]1小时前[强化]2025年山东科技大学085600材料与化工《817物理化学》考研强化检测5套卷22小时前[冲刺]2025年山东科技大学030100法学《704综合一[法理学、国际法学…...

vue3 v-model实例之二,tab标签页的实现
<template><div><Tab v-model"activeTab" :list"tabs" /><div><p>当前激活的 Tab 索引: {{ activeTab }}</p></div></div> </template><script setup> import { ref } from vue; import Tab …...

东方通TongWeb7.0.4.9M4部署SuperMap iServer 11.2.1
一、软件版本 操作系统: CentOS Linux release 7.5.1804 (Core)JDK:11.0.18东方通:TongWeb7.0.4.9M4SuperMap iServer:11.2.1 JDK和TongWeb软件分享: 链接: https://pan.baidu.com/s/1HGDTPnPID0PEOMbg3FjTVQ?pwdbh8v 提取码: bh8v 东方通软…...

QT绘制同心扇形
void ChartForm::paintEvent(QPaintEvent *) {QPainter painter(this);painter.setRenderHint(QPainter::Antialiasing);// 设置抗锯齿painter.save();// 设置无边框(不需要设置QPen,因为默认是不绘制边框的)QPen pen(Qt::NoPen);// QPen pen…...

2012年西部数学奥林匹克试题(几何)
2012/G1 △ A B C \triangle ABC △ABC 内有一点 P P P, P P P 在 A B AB AB, A C AC AC 上的投影分别为 E E E, F F F, 射线 B P BP BP, C P CP CP 分别交 △ A B C \triangle ABC △ABC 的外接圆于点 M M M, N N N. r r r 为 △ A B C \triangle ABC △ABC 的内…...

8位移位寄存器的verilog语言
module shift_register (output reg [7:0] Q, // 8位移位寄存器输出input D, // 输入数据input rst, // 复位信号input clk // 时钟信号 );always (posedge clk) beginif (!rst)Q < 8b00000000; // 复位时将Q清零elseQ < {Q[6:0], D}; // 否则…...

【苍穹外卖】学习心得体会-随笔
前言 写了很久,终于可以完整运行项目了,记录下这几天的心得体会回顾一下知识点 第一天、Git 分布式版本控制工具 一、Git概述 定义:是分布式版本控制工具,用于管理软件开发中的源代码文件,像Java类、xml文件、html…...

MySQL学习之表的增删改
MySQL学习之表的增删改 语法总结: INSERT INTO 表名 (字段名1, 字段名2, ...) VALUES (值1, 值2, ...); //指定字段添加数据 INSERT INTO 表名 VALUES (值1, 值2, ...); //给全部字段添加数据 INSERT INTO 表名 VALUES (值1, 值2, ...), (值1, 值2, ...), (值1, …...
电脑excel词典(xllex.dll)文件丢失是或损坏是什么原因?“xllex.dll文件缺失“要怎么解决?
Excel词典(xllex.dll)文件丢失或损坏?别担心,这里有解决之道! 在日常的电脑使用和办公软件操作中,我们偶尔会碰到一些让人头疼的问题,比如Excel突然提示“Excel词典(xllex.dll&…...

【CSS in Depth 2 精译_084】第 14 章:CSS 蒙版、形状与剪切概述 + 14.1:CSS 滤镜
当前内容所在位置(可进入专栏查看其他译好的章节内容) 第四部分 视觉增强技术 ✔️【第 14 章 蒙版、形状与剪切】 ✔️ 14.1 滤镜 ✔️ 14.1.1 滤镜的类型 ✔️14.1.2 背景滤镜 ✔️ 14.2 蒙版 文章目录 第 14 章 蒙版、形状与剪切 Masks, shapes, and…...

gorm源码解析(四):事务,预编译
文章目录 前言事务自己控制事务用 Transaction方法包装事务 预编译事务结合预编译总结 前言 前几篇文章介绍gorm的整体设计,增删改查的具体实现流程。本文将聚焦与事务和预编译部分 事务 自己控制事务 用gorm框架,可以自己控制事务的Begin࿰…...

前端优雅(装逼)写法(updating····)
1.>>右位移运算符取整数 它将一个数字的二进制位向右移动指定的位数,并在左侧填充符号位(即负数用1填充,正数用0填充)。 比如 2.99934 >> 0:取整结果是2,此处取整并非四舍五入 2.99934 会先…...

黑马Java面试教程_P7_常见集合_P4_HashMap
系列博客目录 文章目录 系列博客目录4. HashMap相关面试题4.4 面试题-HashMap的put方法的具体流程 频54.4.1 hashMap常见属性4.4.2 源码分析 HashMap的构造函数面试文稿: 4.5 讲一讲HashMap的扩容机制 难3频4面试文稿: 4.6 面试题-hashMap的寻址算法 难4…...

使用 CFD 加强水资源管理:全面概述
探索 CFD(计算流体动力学)在增强保护人类健康的土木和水利工程实践方面的重大贡献。 挑战 水资源管理是指规划、开发、分配和管理水资源最佳利用的做法。它包括广泛的活动,旨在确保水得到有效和可持续的利用,以满足各种需求&…...

XXE练习
pikachu-XXE靶场 1.POC:攻击测试 <?xml version"1.0"?> <!DOCTYPE foo [ <!ENTITY xxe "a">]> <foo>&xxe;</foo> 2.EXP:查看文件 <?xml version"1.0"?> <!DOCTYPE foo [ <!ENTITY xxe SY…...

R语言读取hallmarks的gmt文档的不同姿势整理
不同格式各有所用 1.读取数据框格式的 hallmarks <- clusterProfiler::read.gmt("~/genelist/h.all.v7.4.symbols.gmt") #返回的是表格 hallmarks$term<- gsub(HALLMARK_,"",hallmarks$term)适配Y叔的clusterProfiler的后续分析,比如整理后geneli…...

【Nginx-4】Nginx负载均衡策略详解
在现代Web应用中,随着用户访问量的增加,单台服务器往往难以承受巨大的流量压力。为了解决这一问题,负载均衡技术应运而生。Nginx作为一款高性能的Web服务器和反向代理服务器,提供了多种负载均衡策略,能够有效地将请求分…...

Python 的 Decimal的错误计算
摘要 阐述在使用 Python的 Decimal类时,可能产生的错误计算。 在 详述 BigDecimal 的错误计算 中,笔者较为详细地说明了 Java的 BigDecimal可能出错的原因。类似地,Python的 decimal模块中有个 Decimal类,也可用于高精度的十进制…...

教育轻创合伙人模式成为教育行业新风口的原因与市场空间解析
随着教育行业数字化转型的加速,传统教育模式面临成本高、扩张慢等挑战。在此背景下,教育轻创合伙人模式应运而生,正迅速成为教育行业的新风口。这一模式通过低门槛、高灵活性的合作方式,有效打开了教育市场的增量空间。本文将深入…...

开源工具Markdown Viewer:三步掌握浏览器中的Markdown全功能阅读器
开源工具Markdown Viewer:三步掌握浏览器中的Markdown全功能阅读器 【免费下载链接】markdown-viewer Markdown Viewer / Browser Extension 项目地址: https://gitcode.com/gh_mirrors/ma/markdown-viewer 在数字化文档处理日益频繁的今天,高效工…...

HAL_NVIC
文章目录一、NVIC简介 NVIC 做什么?二、NVIC模块详解 1、NVIC 寄存器 2、优先级的定义 1.优先级寄存器NVIC_IPRx 2.优先级分组3、NVIC 工作完整流程 4、F103中断向量表 1.内核异常向量(固定,所有 CM…...

PvZ Toolkit完整指南:植物大战僵尸修改器的终极解决方案
PvZ Toolkit完整指南:植物大战僵尸修改器的终极解决方案 【免费下载链接】pvztoolkit 植物大战僵尸 PC 版综合修改器 项目地址: https://gitcode.com/gh_mirrors/pv/pvztoolkit 你是否厌倦了在植物大战僵尸中重复刷资源?是否想体验游戏的全部乐趣…...
)
【UE6.5 C++27 适配权威指南】:20年引擎老兵亲授7步零错误迁移法(含编译器链兼容性验证清单)
第一章:UE6.5 C27 适配的战略认知与前置准备Unreal Engine 6.5 对 C27 标准的初步支持标志着引擎底层工具链的重大演进。这一适配并非简单的编译器升级,而是涉及构建系统、反射机制、蓝图互操作性及内存模型兼容性的系统性重构。开发者需摒弃“仅更新编译…...

如何永久解锁加密文档?3步破解科学文库时间限制与功能封锁
如何永久解锁加密文档?3步破解科学文库时间限制与功能封锁 【免费下载链接】ScienceDecrypting 破解CAJViewer带有效期的文档,支持破解科学文库、标准全文数据库下载的文档。无损破解,保留文字和目录,解除有效期限制。 项目地址…...

除螨仪哪款好?除螨仪哪个品牌最好?内行人揭秘米家、希亦、友望等除螨仪十大品牌排名,挑选不踩雷!
在选购除螨仪时,很多朋友会问:除螨仪哪个牌子好?现在市面上的除螨仪真的五花八门,不少商家打着“紫外线深层杀菌”“强力拍打彻底除螨”的旗号,实则是偷工减料的不专业产品。用起来要么拍打力度弱、吸力不足࿰…...

深入解析PCS1800分布式控制系统:架构设计与工业应用实践
1. PCS1800分布式控制系统架构解析 第一次接触PCS1800系统是在2013年某化工厂的DCS改造项目上。当时现场老师傅指着机柜里整齐排列的模块说:"这玩意儿就像人的神经系统,MNet是大脑,SNet是脊髓,CNet就是末梢神经。"这个…...

Ostrakon-VL 扫描终端嵌入式部署初探:在 STM32 生态下的轻量级应用
Ostrakon-VL 扫描终端嵌入式部署初探:在 STM32 生态下的轻量级应用 1. 嵌入式视觉的新机遇 在工业质检、智能零售和智慧农业等领域,越来越多的场景需要设备具备实时视觉理解能力。传统方案往往依赖高性能计算平台或云端处理,但在资源受限的…...

小杰云商城系统源码/小程序源码平台/电商系统源码/完整版/全开源
小杰云商城系统源码 完整版 全开源 基于多款经典商城深度优化重构,不管是功能、颜值、安全、流畅度,直接给你干到天花板! 完美适配易支付V2和mapi支付,拿到手简单配置就能上线运营,不用你再费劲改接口! 功能多到爆炸࿰…...