Grad-CAM-解释CNN决策过程的可视化技术
Grad-CAM(Gradient-weighted Class Activation Mapping)是一种用于解释卷积神经网络(CNN)决策过程的可视化技术。其核心思想是通过计算分类分数相对于网络确定的卷积特征的梯度,来识别图像中哪些部分对分类结果最为重要。这种方法不需要修改网络架构,因此可以广泛应用于各种CNN模型中。
Grad-CAM的工作原理
-
梯度计算:Grad-CAM首先计算目标类别(即模型预测的类别)对最后一个卷积层特征图的梯度。这些梯度反映了每个特征通道对预测结果的影响程度。

可解释机器学习:Grad-CAM
-
权重计算:通过全局平均池化(Global Average Pooling, GAP),将每个特征通道的梯度求平均,得到该通道的重要性权重。这些权重表示了每个通道对目标类别的贡献程度。
-
特征图加权:将特征图与计算出的权重相乘,然后通过ReLU函数进行非线性处理,以突出显示对分类结果影响最大的区域。最终得到的热力图即为Grad-CAM可视化结果,颜色越深的部分表示对分类结果影响越大。

CAM, Grad-CAM, Grad-CAM++可视化CNN方式的代码实现
-
定位重要区域:通过叠加Grad-CAM热力图在原始图像上,可以直观地看到模型在做出分类决策时关注的图像区域。这些区域通常是图像中对分类结果影响最大的部分。

Gradient-weighted Class Activation Mapping (Grad-CAM)实现热力图
Grad-CAM的优势与局限
-
优势:
- 无需修改网络结构:Grad-CAM可以在不改变现有网络架构的情况下,为任何基于CNN的模型生成可视化解释。
- 高分辨率和类别区分性:Grad-CAM能够提供高分辨率的可视化结果,并且能够精确识别出对特定类别的预测有显著贡献的区域。
- 适用于多种任务:除了图像分类,Grad-CAM还可以应用于图像字幕生成、视觉问答等任务。
-
局限:
- 单一热力图:当图像中存在多个同类物体时,Grad-CAM只能生成一个热力图,无法区分不同物体的贡献。
- 梯度饱和问题:在某些情况下,梯度可能会饱和或消失,导致可视化效果不佳。
应用实例
Grad-CAM已被广泛应用于多个领域,例如:
- 图像分类:通过可视化图像中对分类决策至关重要的区域,帮助理解模型的决策过程。
- 弱监督定位:在标注信息有限的情况下,Grad-CAM能够有效地定位图像中的关键区域,提高模型的定位精度。
- 视觉问答:通过可视化问题相关的图像区域,增强模型对问题的理解能力。
Grad-CAM是一种强大的可视化工具,能够帮助研究人员和工程师更好地理解和解释深度学习模型的决策过程。尽管存在一些局限性,但其在可解释性分析中的应用前景仍然非常广阔。
Grad-CAM在处理图像中多个同类物体时的改进方法是什么?
Grad-CAM在处理图像中多个同类物体时的改进方法主要体现在Grad-CAM++算法上。Grad-CAM++通过以下几种方式解决了原Grad-CAM在处理多个同类物体时的局限性:
-
像素级梯度加权:Grad-CAM++在CNN的最终卷积特征图中,对特定空间位置的输出梯度进行像素加权,以衡量每个像素对CNN整体决策的重要性。这种方法使得Grad-CAM++能够更准确地定位图像中的多个目标。
-
加权组合的改进:Grad-CAM++使用最后一个卷积层特征图对特定类得分的正偏导数的加权组合,为类标签生成可视化解释。这种加权组合的方法能够更好地捕捉图像中的多个对象实例。
-
解决梯度饱和问题:Grad-CAM++还解决了梯度饱和、梯度消失和梯度噪声的问题,这些问题在原Grad-CAM中较为常见。
-
不同通道捕捉不同特征:Grad-CAM++通过使用不同的通道来捕捉不同的特征,从而能够更全面地解释图像中的多个同类物体。
-
权重分配的优化:Grad-CAM++给每一个激活函数增加了一个权重,这使得不同位置的梯度值在全局平均池化(GAP)之后的影响不再相同,从而提高了可视化解释的精度。
-
实验验证:Grad-CAM++在多个任务中,包括分类、图像标题生成和3D动作识别,提供了有前景的人类可解释的视觉解释,并且在弱监督定位对象类方面优于Grad-CAM。
如何解决Grad-CAM中的梯度饱和问题以提高可视化效果?
要解决Grad-CAM中的梯度饱和问题以提高可视化效果,可以参考以下几种方法:
-
使用Grad-CAM++:
Grad-CAM++是对Grad-CAM的改进版本,它通过在像素级对梯度进行加权平均来获得特征图的权重。这种方法可以更好地捕获特定激活图的重要性,并避免了梯度饱和的问题。 -
引入平滑技术(Smooth Grad-CAM++):
平滑技术通过在输入图像上添加噪声并计算多个噪声图像的梯度矩阵的平均值来减少视觉噪声。这种方法可以提高基于梯度的敏感性图的清晰度,从而提供更好的可视化效果。 -
Score-CAM:
Score-CAM是一种基于权重的卷积神经网络可视化方法,通过对激活图的每个通道进行上采样并生成掩模,再用掩模点乘原图后输入到CNN中,从而生成更准确的热力图。 -
集成梯度(Integrated Gradients):
集成梯度方法通过逐步变化输入图像并计算输出与Grad-CAM特征图之间的梯度,以满足敏感性公理。这种方法可以提高可解释性和解释的忠实性,从而提升可视化效果。 -
使用不同的激活函数:
梯度饱和问题可能源于深度神经网络中使用的激活函数(如Sigmoid和ReLU)。可以尝试使用其他激活函数,如Swish或GELU,这些函数在某些情况下可以减少梯度饱和的问题。 -
改进的Grad-CAM方法:
例如,针对嵌入式网络的改进Grad-CAM方法,使用triplet loss代替分类任务中的类别激活值进行反向求导,并在训练阶段提前提取特征和反传梯度,测试阶段复用这些梯度以避免反向求导。
Grad-CAM在弱监督定位任务中的应用案例有哪些?
Grad-CAM在弱监督定位任务中的应用案例包括以下几个方面:
-
工业缺陷检测:在工业品缺陷检测中,Grad-CAM被用于生成热力图,以识别图像中的缺陷位置。这种方法不需要改变现有的CNN模型结构,从而避免了预训练权重无法有效适配改动后的CNN结构的问题。
-
图像分类和视觉问答(VQA) :Grad-CAM在图像分类和VQA任务中表现出色,能够提供对CNN失败案例的观察,并解释看似不合理预测的合理原因。它通过识别数据集的偏移实现模型泛化,帮助用户区分“更强”和“更弱”的网络。
-
遥感图像处理:在遥感图像处理中,Grad-CAM++技术被用于生成显著性图,捕捉分类模型的关注区域,并使用阈值生成对象边界框,以指导模型训练。这种方法还设计了自引导损失函数,以减少背景干扰。
-
Kaggle HPA竞赛:在Kaggle HPA竞赛中,Grad-CAM被用于分割显微镜下细胞照片中的细胞区域和种类。通过结合无监督学习,Grad-CAM方法能够更有效地处理图像中的目标。
-
弱监督分割:Grad-CAM被用作弱监督来训练分割架构,如SEC(Softly Evolved Convolutional Networks),以提高分割精度。
Grad-CAM与其他可解释性技术(如LIME、SHAP)相比的优势和局限性是什么?
Grad-CAM与其他可解释性技术(如LIME、SHAP)相比,具有以下优势和局限性:
优势
- 无需修改模型结构:Grad-CAM可以在不修改现有卷积神经网络(CNN)结构的情况下,直接应用于已有的模型,这使得它在实际应用中非常灵活和方便。
- 高精度与可解释性的平衡:Grad-CAM通过使用全连接层代替全局平均池化(GAP)层,解决了传统CAM算法只能分析最后一层卷积输出的局限性,同时保持了高精度与可解释性的平衡。
- 适用于多种任务:Grad-CAM不仅适用于图像分类任务,还可以应用于图像描述、视觉问答等多个任务,适用范围广泛。
- 类判别定位:Grad-CAM能够生成高分辨率且具有类别判别性的热力图,帮助理解模型在图像分类任务中的决策依据。
局限性
- 定位精度问题:Grad-CAM在定位图像中的重要区域时可能存在粗略的问题,尤其是对于复杂或模糊的对象,其定位效果可能不够精确。
- 多个同类物体的处理:当图像中包含多个同类物体时,Grad-CAM只能生成一块热力图,无法区分这些物体对预测的影响,这限制了其在某些场景下的应用。
- 梯度噪声和消失问题:Grad-CAM依赖于梯度信息,但梯度可能会受到噪声的影响,且在深层神经网络中容易出现梯度消失的问题,这会影响热力图的准确性。
- 计算开销:生成Grad-CAM热图的计算要求较高,尤其是在处理大型数据集或复杂模型时,这可能限制其在实时应用中的实用性。
- 前向计算的忽略:Grad-CAM主要关注反向传播的梯度信息,而没有考虑前向计算的影响,这可能导致某些情况下解释不够全面。
与其他技术的比较
- LIME:LIME通过扰动输入图像的像素并观察模型输出的变化来生成解释,适用于单个预测的解释。然而,LIME的可视化效果可能不够直观,且在处理高维数据时效率较低。
- SHAP:SHAP通过计算每个特征对模型预测的贡献来生成解释,适用于整个模型或单个变量的解释。SHAP提供了更全面的解释方法,但其计算复杂度较高,且在某些情况下可能不如LIME直观。
Grad-CAM在无需修改模型结构、高精度与可解释性平衡以及适用范围广泛等方面具有显著优势,但在定位精度、处理多个同类物体、梯度噪声和消失问题以及计算开销等方面存在局限性。
在视觉问答任务中,Grad-CAM如何增强模型对问题的理解能力?
在视觉问答任务中,Grad-CAM通过生成热图来增强模型对问题的理解能力。具体来说,Grad-CAM利用模型的梯度信息来确定输入图像的哪些部分对于目标类别最重要。这种方法首先计算目标类别相对于特定卷积层的梯度,这些梯度代表了每个特定特征映射的重要性。然后,对于每个特征映射,计算其梯度的全局平均值,这会给出权重系数。最后,将权重系数与卷积层的输出相乘,然后对结果进行逐像素求和,产生一个热图。
在视觉问答任务中,Grad-CAM通过突出显示输入图像中与目标类别最相关的区域,帮助模型更好地理解图像中的关键信息。这种热图不仅提高了模型的透明度,还使研究人员和用户能够直观地看到模型在进行预测时关注的图像区域。例如,在一个视觉问答模型中,Grad-CAM可以生成一个热图,显示图像中哪些部分对模型的回答贡献最大。这有助于解释为什么模型会给出特定的答案,并且可以帮助调试和改进模型。
此外,Grad-CAM还可以用于定位对象和增强弱监督学习。通过生成类激活图,Grad-CAM能够突出显示输入图像的哪些区域对模型对特定类的预测贡献最大。这种定位有助于可视化和理解模型在进行预测时关注的图像中的特定特征或区域。在视觉问答任务中,这种能力尤为重要,因为它可以帮助模型更准确地理解问题中的关键视觉元素,并提供更可靠的答案。
相关文章:
Grad-CAM-解释CNN决策过程的可视化技术
Grad-CAM(Gradient-weighted Class Activation Mapping)是一种用于解释卷积神经网络(CNN)决策过程的可视化技术。其核心思想是通过计算分类分数相对于网络确定的卷积特征的梯度,来识别图像中哪些部分对分类结果最为重要…...

前后端学习中本周遇到的内容
一、RequiresPermissions注解 例如: RequiresPermissions("demo:staff:save") void saveStaff(); 权限控制,要求含有demo:staff:save的权限才能执行方法saveStaff()。 二、遇到的细节问题 在进行增删改查时,发送http请求时&…...

基于海思soc的智能产品开发(巧用mcu芯片)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 对于开发车规级嵌入式软件的同学来说,socmcu这样的组合,他们并不陌生。但是传统的工业领域,比如发动机、医疗或…...

批量DWG文件转dxf(CAD图转dxf)——c#插件实现
此插件可将指定文件夹及子文件夹下的dwg文件批量转为dxf文件。 (使用方法:命令行输入 “netload” 加载插件,然后输入“dwg2dxf”运行,选择文件夹即可。) 生成dxf在此新建的文件夹路径下,包含子文件夹内的…...

flask flask-socketio创建一个网页聊天应用
应用所需环境: python 3.11.11 其他 只需要通过这个命令即可 pip install flask3.1.0 Flask-SocketIO5.4.1 -i https://mirrors.tuna.tsinghua.edu.cn/pypi/web/simple 最好是用conda创建一个新的虚拟环境来验证 完整的pip list如下 Package Version ----…...

使用CNN模型训练图片识别(键盘,椅子,眼镜,水杯,鼠标)
首先是环境: 我是在Anaconda3中的Jupyter Notebook (tensorflow)中进行训练,环境各位自行安装 数据集: 本次数据集五个类型(键盘,椅子,眼镜,水杯,鼠标)我收集了每个接近两…...
Gitlab 数据备份全攻略:命令、方法与注意事项
文章目录 1、备份命令2、备份目录名称说明3、手工备份配置文件3.1 备份配置文件3.2 备份ssh文件 4、备份注意事项4.1 停止puma和sicdekiq组件4.2 copy策略需要更多磁盘空间 5、数据备份方法5.1 docker命令备份5.2 kubectl命令备份5.3 参数说明5.4、选择性备份5.5、非tar备份5.6…...
Vue|scoped样式
在 Vue.js 中,scoped 是一个非常有用的特性,允许你将样式限制在当前组件的作用域内,避免样式泄漏到其他组件。它是通过 Vue 的单文件组件(.vue 文件)中的 <style> 标签实现的。 目录 案例演示创建多个vue文件如何…...
)
eBPF试一下(TODO)
eBPF程序跟踪linux内核软中断 eBPF (Extended Berkeley Packet Filter) 是一种强大的 Linux 内核技术,最初用于网络数据包过滤,但现在它已经扩展到了多个领域,如性能监控、安全性、跟踪等。eBPF 允许用户在内核中执行代码(以一种安…...
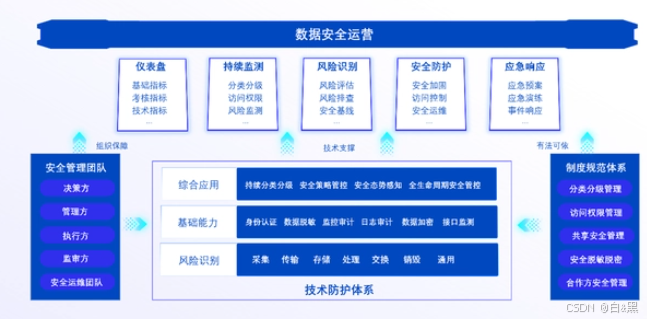
【数据安全】如何保证其安全
数据安全风险 数字经济时代,数据已成为重要的生产要素。智慧城市、智慧政务的建设,正以数据为核心,推动城市管理的智能化和公共服务的优化。然而,公共数据开放共享与隐私保护之间的矛盾日益凸显,如何在确保数据安全的…...

[创业之路-196]:华为成功经验的总结与教训简单总结
目录 前言: 成功经验 教训归纳 前言: 华为作为世界领先的通信设备制造商,其成功经验与教训值得深入探讨。 以下是对华为成功经验的总结与教训的归纳: 成功经验 战略定位明确: 华为始终坚持“死死抓住核心技术”…...

使用 NVIDIA DALI 计算视频的光流
引言 光流(Optical Flow)是计算机视觉中的一种技术,主要用于估计视频中连续帧之间的运动信息。它通过分析像素在时间维度上的移动来预测运动场,广泛应用于目标跟踪、动作识别、视频稳定等领域。 光流的计算传统上依赖 CPU 或 GP…...

【UE5】pmx导入UE5,套动作。(防止“气球人”现象。
参考视频:UE5Animation 16: MMD模型與動作導入 (繁中自動字幕) 问题所在: 做法记录(自用) 1.导入pmx,删除这两个。 2.转换给blender,清理节点。 3.导出时,内嵌贴图,选“复制”。 …...
vue预览和下载 pdf、ppt、word、excel文档,文件类型为链接或者base64格式或者文件流,
** 方法1:word、xls、ppt、pdf 这些文件, 如果预览的文件是链接可以直接打开,可用微软官方的预览地址 ** <iframe width"100%" :src"textVisibleURl " id"myFramePPT" style"border: none;backgroun…...

前端如何实现大文件上传
在前端实现大文件上传的主要方法包括分片上传、断点续传、WebSocket上传和通过第三方服务上传。 分片上传:将大文件切割成多个小片段,然后分别上传。可以使用HTML5的File API和Blob对象,通过FileReader读取文件内容,然后使…...

如何评估并持续优化AI呼入机器人的使用效果
如何评估并持续优化AI呼入机器人的使用效果 作者:开源呼叫中心FreeIPCC 随着人工智能技术的快速发展,AI呼入机器人在客户服务、技术支持等多个领域得到了广泛应用。这些智能系统不仅提高了工作效率,降低了运营成本,还显著改善了…...

找不同,找原因
Yes, you can use “by the time I get back to it” instead of “get around to it,” but there’s a slight difference in tone and meaning: • “Get around to it” implies finally finding the time or motivation to do something after delaying or procrastina…...
OpenCV 学习记录:首篇
最近在学习机器视觉,希望能通过记录博客的形式来鞭策自己坚持学完,同时也把重要的知识点记录下来供参考学习。 1. OpenCV 介绍与模块组成 什么是 OpenCV? OpenCV (Open Source Computer Vision Library) 是一个开源的计算机视觉和机器学习软…...

Java项目常见基础问题汇总
在 Feign 的实现下,我们只需创建一个接口并使用注解的方式来配置它RESTful API 与 SOAP、GraphQL 等其他 API 设计方式各有优劣,发者应根据具体业务需求选择合适的架构Dubbo开始于电商系统,大公司在OSI网络通信模型中,RPC跨越了传…...
git 删除鉴权缓存及账号信息
在Windows系统下 清除凭证管理器中的Git凭据 按下Win R键,打开“运行”对话框,输入control,然后回车,打开控制面板。在控制面板中找到“用户账户”,然后点击“凭据管理器”。在凭据管理器中,找到“Windows…...

维普AI率82%熬夜改一周只降4个点!这款软件几分钟救我一命!
维普AI率82%熬夜改一周只降4个点!这款软件几分钟救我一命! 周一早上送维普看到 82% 那一刻 3 月 17 号周一早上 9 点。导师群:「答辩前再送一次维普看 AIGC 检测,下周一早上群里发达标截图」。我赶紧上传维普「智能检测 4.0」—…...

2026年工程师必知:20个AI核心术语,构建真正AI产品的第一性原理指南
面向真正构建AI产品的工程师——而非仅止于空谈者的第一性原理指南 坦诚而言,市面上绝大多数"AI术语汇编"类文章,其目标受众是那些希望在会议中显得见多识广的人。而本文,则专为那些真正动手构建的人而写。两者之间,存…...

延世大学揭秘:为何AI记忆模型越用越“糊涂“?
这项由韩国延世大学(Yonsei University)研究团队完成的研究,以预印本形式发布于2026年5月,论文编号为arXiv:2605.07755,有兴趣深入了解的读者可通过该编号查询完整论文。当我们谈起人工智能处理长篇文字或复杂序列时&a…...

终极指南:无需Office软件,3秒预览Word、Excel、PPT文件
终极指南:无需Office软件,3秒预览Word、Excel、PPT文件 【免费下载链接】QuickLook.Plugin.OfficeViewer Word, Excel, and PowerPoint plugin for QuickLook. 项目地址: https://gitcode.com/gh_mirrors/qu/QuickLook.Plugin.OfficeViewer 还在为…...

基于Seedream_MCP构建AI工具服务器:从协议解析到实战开发
1. 项目概述与核心价值最近在折腾AI应用开发,特别是想给大模型装上一个能“动手动脚”的插件系统时,发现了一个挺有意思的项目:skyinv/Seedream_MCP。简单来说,这是一个基于模型上下文协议的开源实现,它能让你的AI助手…...

AI编码助手选型与实战:从Awesome List到高效开发工作流
1. 项目概述:一个AI编码时代的“藏宝图”如果你最近也在关注AI如何改变编程这件事,那你大概率已经听过“AI编码助手”或者“AI结对编程”这些词了。从GitHub Copilot到各种开源的代码生成模型,工具层出不穷,但问题也随之而来&…...

macOS原生系统监控工具MeterBar:Swift开发与状态栏应用实践
1. 项目概述:一个桌面系统监控工具的诞生最近在折腾一个挺有意思的小玩意儿,叫 MeterBar。这名字听起来就挺直观的,meter(仪表) bar(状态栏),合起来就是一个能放在你电脑屏幕顶部的系…...

yargs配置加密:敏感信息处理与解密中间件终极指南
yargs配置加密:敏感信息处理与解密中间件终极指南 【免费下载链接】yargs yargs the modern, pirate-themed successor to optimist. 项目地址: https://gitcode.com/gh_mirrors/ya/yargs yargs作为现代命令行参数解析工具,在处理配置文件时经常…...

TV Bro电视浏览器完全指南:如何在智能电视上享受大屏上网的终极体验
TV Bro电视浏览器完全指南:如何在智能电视上享受大屏上网的终极体验 【免费下载链接】tv-bro Simple web browser for android optimized to use with TV remote 项目地址: https://gitcode.com/gh_mirrors/tv/tv-bro TV Bro是一款专为智能电视和遥控器操作优…...

5分钟掌握深度学习字体识别:DeepFont实战指南
5分钟掌握深度学习字体识别:DeepFont实战指南 【免费下载链接】Font_Recognition-DeepFont Its a implementation of DeepFont : Identify Your Font from An Image using Keras 项目地址: https://gitcode.com/gh_mirrors/fo/Font_Recognition-DeepFont 在数…...